‘皇冠’梨断柄去袋装置设计与试验
2024-02-22 02:55黄庆阳姜海勇索雪松江东博
河北农业大学学报 2024年1期
黄庆阳,姜海勇,索雪松,张 博,江东博
(河北农业大学 机电工程学院,河北 保定 071000)
‘皇冠’梨营养丰富、口感蜜甜,富含膳食纤维,皮薄核小,可食用率高,并且具有镇咳、抗炎、利尿的药用功效[1-2]。我国梨果栽培面积大、果实产量高,均位于世界首位[3]。‘皇冠’梨果实生长过程中,为减少病虫害、提高果实质量,需对‘皇冠’梨幼果进行套袋处理[4-5]。采摘后‘皇冠’梨为满足加工、市场要求,需人工进行剪柄和去除纸袋的工作,劳动强度大、工作效率低,相关自动化设备的研究是当务之急。
目前水果断柄机构的相关研究多用于采摘机器人,按断柄方式可分为扭断、切断、锯断等[6]。如中国农业大学徐丽明[7]等研制的脐橙采摘机器人末端执行器采用切刀切断的方式实现对果实的断柄。西北农林科技大学陈军[8]等研制的猕猴桃采摘末端执行器通过旋转末端执行器将果柄扭断。意大利Armada[9]等研制的柑橘采摘机器人末端执行器采用圆形锯片对果柄进行锯断。由于采摘后‘皇冠’梨仍套有纸袋,且梨柄处纸袋内部嵌有束口用的铁丝,上述机构无法实现同时对梨柄、纸袋、铁丝三者的复合体的切断。对针对上述问题,本文设计了1 种‘皇冠’梨断柄撕袋装置,可实现对采摘后‘皇冠’梨的断柄和撕袋作业。该装置为‘皇冠’梨断柄去袋套网分拣一体机(以下简称一体机)的关键部件,该装置的断柄和撕袋作业质量是能否去袋成功的关键,所以本文重点对一体机的断柄、撕袋机构进行研究试验。
1 设计要求及工作原理
1.1 一体机断柄去袋工作原理
一体机主要由旋转平台、夹持装置、断柄装置、撕袋装置、去袋装置、套网装置和分拣装置构成。整机采用旋转六工位式作业模式,工作时人工连续投料,分布于6 个工位处的装置同时工作依次实现断柄、去袋、套网和分拣任务。整机结构及工位分布如图1 所示。
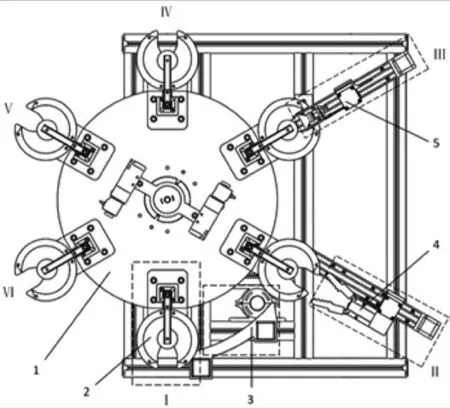
图1 一体机结构示意图Fig.1 Schematic diagram of all-in-one machine
一体机工作流程:1)人工将采摘后‘皇冠’梨以梨柄向下的方式放置于工位Ⅰ处的夹持装置上完成装夹;2)夹持装置上的‘皇冠’梨在旋转平台的转动作用下向工位Ⅱ运动,运动过程中由断柄装置完成断柄任务;3)位于工位Ⅱ处的撕袋机械手在十字滑台驱动下从断柄处将纸袋撕开(图2c);4)位于第Ⅲ工位处的去袋机械手在十字滑台的驱动下从纸袋撕口处对梨身进行抓取,利用去袋机械手上的吹嘴将纸袋吹离(图2d);5)位于第Ⅳ工位处的套网装置对‘皇冠’梨进行套网;6)位于工位Ⅴ处的分拣装置对‘皇冠’梨进行质量检测;7)‘皇冠’梨在工位Ⅵ处完成卸料与收集。

图2 断柄去袋过程示意图Fig.2 Schematic diagram of the bag removal process
1.2 断柄机构工作原理
由于梨柄处纸袋内部嵌有束口用的铁丝,其材质为Q195。断柄作业时,需实现同时对梨柄、纸袋、铁丝三者复合体的切断。由于能断铁丝的刀具不能过于锋利,不适用于剪切纸袋,而刃口锋利能切断纸袋的刀具又不利于剪切铁丝。针对上述问题,选用切削效率高、空间占用小的金属圆锯片对其进行锯切。断柄装置结构图如图3 所示。其主要由安装架、锯片、锯片安装杆、交流有刷电机和压块组成,其中锯片直径为25 mm,通过控制电机转速调节锯切速度。锯切过程中,锯切力随着锯切速度的提高而减小[10],但锯切速度过大,会降低锯切过程稳定性。参考金属锯切工艺推荐切削速度[11-12],设定锯切速度为95 m/min,相应的锯片转速为1 250 r/min。
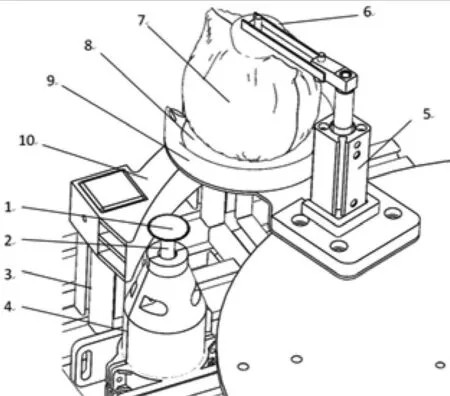
图3 断柄装置结构图Fig.3 Handle breaking device structure diagram
工作时人工上料,待加工‘皇冠’梨以梨柄向下的方式放置于旋转平台上的定位板上,此时梨柄位于支撑板上的V 形定位口内,梨柄及包覆在其周围的纸簇待切削部分位于定位板下方。压紧气缸驱动压头向下压紧完成装夹。转动平台旋转进而带动‘皇冠’梨开始运动,梨柄部分进入压块工作区后,梨柄及包覆在其周围的纸袋在压块的压紧作用下发生聚拢并逐渐向定位口压紧。为使压紧过程中压块对纸簇的压力增幅缓慢且平稳,同时降低动力输入波动,压块工作面采用对数螺线型曲面[13]。由对数螺线的性质可知,压紧过程中梨柄和纸袋所受压紧力方向和运动方向夹角保持不变[14],避免了梨柄在压紧过程中的摆动。梨柄运动至压块末端时,梨柄和纸袋经过锯片锯齿与压块之间的缝隙从而被切断。由于梨柄位于纸团中心区域,梨柄被锯片完全切断。而由于锯片边缘与压块之间存在缝隙,纸袋不会被完全切断而留有一定宽度的剩余量。切削过程中,梨柄会受切削力的作用而发生摆动。为避免梨柄因摆动而从锯片内侧或顶部通过导致切削失败,锯片锯切方向与梨运动方向一致。
1.3 撕袋机构工作原理
撕袋机构如图4 所示,其主要由丝杠滑台模组、撕袋机械臂、撕袋机械手组成。其中撕袋机械手主要由手指气缸和齿形夹爪构成,夹爪末端最大夹持力为18 N,机械手最大指间距为35 mm。为提高撕袋过程中夹持稳定性,两夹爪工作面设计为交错的齿形面。工作时,机械手张开并运动至梨柄处对切口下方的纸袋进行夹持,为避免撕袋机械手与支撑板和梨身发生干涉,持有纸袋的机械手先沿水平方向运动完成预撕裂,再沿既定路径运动实现撕袋任务。
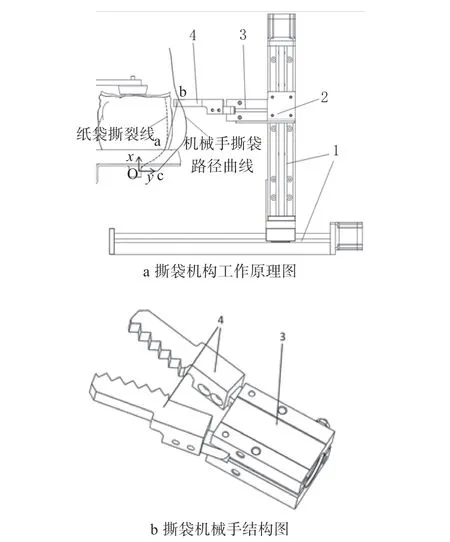
图4 撕袋机构示意图Fig.4 Schematic diagram of bag tearing mechanism
纸张内纤维的排列具有方向性,纤维主要沿抄纸方向进行排列,称抄纸方向为纵向,与纵向垂直的为横向。由于纸张被撕裂的实质是纸浆纤维的断裂和交织在一起的纤维之间的互相抽离,所以其主要抗撕裂力为纤维间结合力和纤维抵抗断裂的力。纸张沿纵向撕裂时,裂口沿纵向纤维扩展,断口整齐且平直[15]。通过撕裂试验得出,用于‘皇冠’梨套袋的纸袋,沿梨身轴线方向为纸张纤维的纵向。为提高撕袋后的纸袋形态一致性进而保障去袋成功率,对包覆在‘皇冠’梨上的纸袋沿其纤维纵向进行撕裂[16-17]。为提高夹持装置对梨身夹持的稳定性、避免‘皇冠’梨在撕袋过程中发生歪斜。撕袋机械手应沿纸袋断裂线上在断裂点处的切线方向对其进行撕裂。设a 点为撕袋过程中纸袋的断裂点,b 点为机械手的夹持点,则ab 为纸袋撕裂曲线的切线,且曲线oa 的长度与ab 相等。为保证去袋机械手能从撕袋后纸袋的撕裂口处顺利通过,纸袋撕裂口宽度应大于35 mm,为防止撕裂力过大破坏梨身夹持状态或造成梨身的歪斜影响去袋作业成功率,撕裂口宽度不宜过大,应小于75 mm。取二者平均值55 mm 作为目标撕裂宽度。
为利用以上几何关系对撕袋机械手撕袋运动路径进行计算,利用软尺和记号笔测量并描绘出沿纸张纤维纵向断裂时撕裂口宽度为55 mm 时的撕裂线,如图5 所示。

图5 带袋‘皇冠’梨Fig.5 Bag Crown Pear
以图4a 中撕裂线起始处作为坐标原点O,梨身轴线方向为x轴建立平面直角坐标系xOy。使用MATLAB 软件的图像处理功能建立纸袋目标撕裂线的曲线方程。首先使用Training Image Labler 工具对图5 所示的目标撕裂线上的点进行提取[18],将提取出的坐标点用Plot 绘图指令在软件上绘制出纸袋目标撕裂线,运用Curve Fiting 曲线拟合工具对点轨迹进行曲线拟合[19],拟合结果如图6 所示。
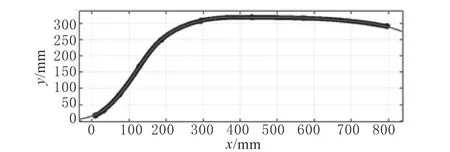
图6 撕裂线拟合结果Fig.6 Tear line fitting results
根据撕裂线和机械手运动轨迹的几何关系利用MATLAB 进行计算分析,得出机械手运动轨迹方程为
式中,p1=2.81×10-6,p2=-3.37×10-3,p3=1.34,p4=489.8。
2 关键部件的设计
2.1 压块的设计
压块是断柄装置的重要构件(图7)。
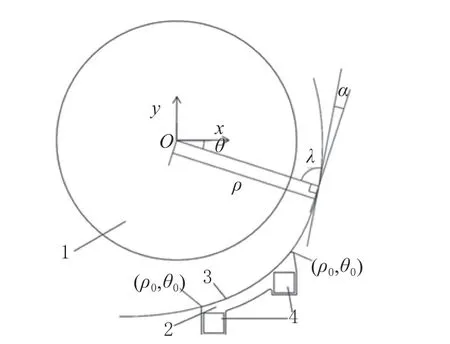
图7 压块结构参数Fig.7 Briquette structure
有以下作用:1)要求对梨柄及其周围纸袋实现聚拢、压紧作用进而提高待加工物结构一致性和锯切时的稳定性;2)缩小锯切面积,减小锯切空间;3)保证梨柄能够顺利进入锯切区域保证装置断柄工作的顺利完成。
根据上述要求,压块的对数螺线型工作表面具有以下特征(图7):设xOy是以旋转平台中心为坐标原点O的坐标系,则压块的对数螺线型工作表面在极坐标xOy中一般形式[20]为:
ρ=keθcotλ(2)
其中,ρ为对数螺线的极径,表示压块工作表面上的点到旋转平台中心的距离,mm;θ为对数螺线的极角,°;k 为常数,表示极角θ为0 时极径ρ的大小;e 为自然常数;λ 为常数,表示为该对数螺线上任意点的切线与极径ρ的夹角,°。
摩擦角为
压紧位移为
其中,S—压块对梨柄的压紧位移,mm;
ρ0—θ=θ0时极径的长度,mm;
ρ1—θ=θ1时极径的长度,mm。
式( 2) 中,令m=cotλ,则
压块工作面上任意点的曲率半径为
则式(2)变形为
将式(6)转换成直角坐标下的参数方程可得
为保证上料时梨柄不与压块发生干涉、锯切装置不与撕袋机械手干涉,θ0、θ1的取值范围为
结合设计要求,取θ0=50°,θ1=80°。
为保证纸袋顺利进入压块工作区,同时尽可能减小摩擦角α,取ρ0=240 mm,ρ1=253 mm。
将极坐标下的点(240,-50)、点(253,-80)代入式(7)得m=0.08,将结果代入式(8)得:λ=85.3°,k=228.5 mm。
将所得压块的对数螺线型工作面曲线方程输入建模软件Solidworks,建立压块的三维模型。
2.2 支撑板的设计
支撑板对‘皇冠’梨具有支撑、定位的作用,断柄工作时梨柄及纸袋被压块向其“V”形定位口处压紧。欲实现对梨柄完全切断的同时纸袋被不完全切断,梨柄在定位口的位置至关重要[21]。故“V”形定位口开口角度将直接影响断柄、切袋效果。定位板结构及参数如图8 所示。
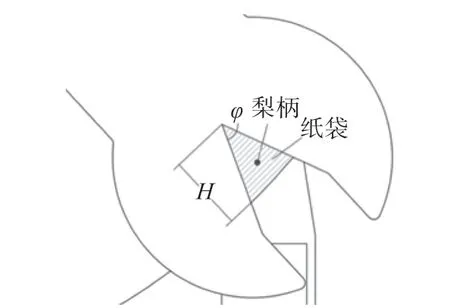
图8 支撑板结构参数Fig.8 Support plate structure parameters
纸袋在压紧过程中的皱化为纸张的弯曲变形,其压紧后的截面积是物料本身压缩后截面积与压紧后物体间空隙面积之和[22]。为方便对梨柄位置进行计算,对压紧后梨柄处的复合体做如下合理假设:1)假设梨柄周围的纸袋是均匀包覆在梨柄周围,且压紧过程中梨柄位于截面的形心处;2)假设与压块工作面接触的物料截面为一段直线,压紧后复合体截面形状为一等腰三角形;3)假设梨柄截面为标准圆形。
支撑板关键参数为“V”形定位口开口深度和开口角度。则压紧后物料截面面积为
其中,S—压紧后物料截面面积,mm2;
h—单层纸袋厚度,mm;
B—纸袋宽度,mm;
r—梨柄半径,mm。
由图5 可得,纸袋在“V”形定位口处被压紧后面积为
经测量,梨柄平均直径为1.5 mm,单层纸袋平均厚度为0.12 mm,展开后袋宽为140 mm,开口大小与开口深度的关系为
则梨柄边缘到压块工作面最小距离与定位板开口大小的关系为
3 断柄去袋装置试验与分析
3.1 试验因素与方案
通过上述分析可知,影响断柄切袋装置作业效果的主要因素包括:锯片外边缘与压块工作面之间的间隙、支撑板的“V”形定位口开口大小、旋转平台转速。若切割间隙过大,梨柄通过间隙时与锯片不发生锯切或部分锯切,则装置无法实现断柄功能,若切割间隙过小,则锯切后剩余纸袋宽度不足,无法实现撕袋或撕袋后不能实现后续纸袋的吹离。
根据装置的设计要求,以断面百分比和撕袋作业后纸袋撕口宽度2 项指标,作为本文设计的断柄切袋装置工作参数优化的依据设计Box-Behnken 试验[23],试验因素A为切割间隙,mm;B为定位口角度,°;C为平台转速,r/min;试验响应值Y1 为撕口平均宽度,mm;Y2 为断柄率,%。由前文理论分析和计算作为依据确定试验因素的高低水平,因编码、因素水平见表1,表2。
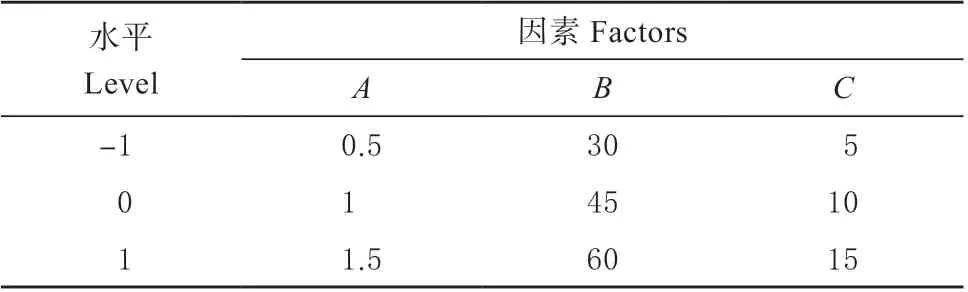
表1 试验因素编码Table 1 Test Factors and Levels
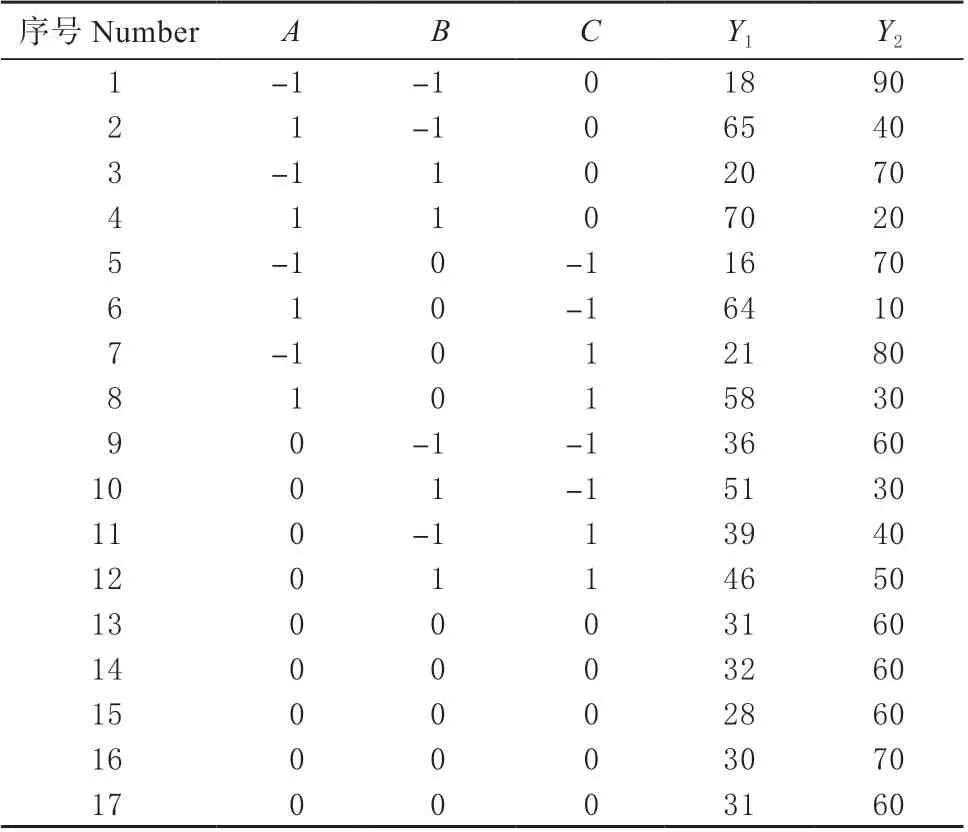
表2 Box-Behnken 试验方案与结果Table 2 Box-Behnken Test scheme and result
3.2 试验结果与方差分析
依据表2,使用State-East 公司的Design-Expert V12.0.软件对试验结果进行方差分析[24],结果如表3 所示。
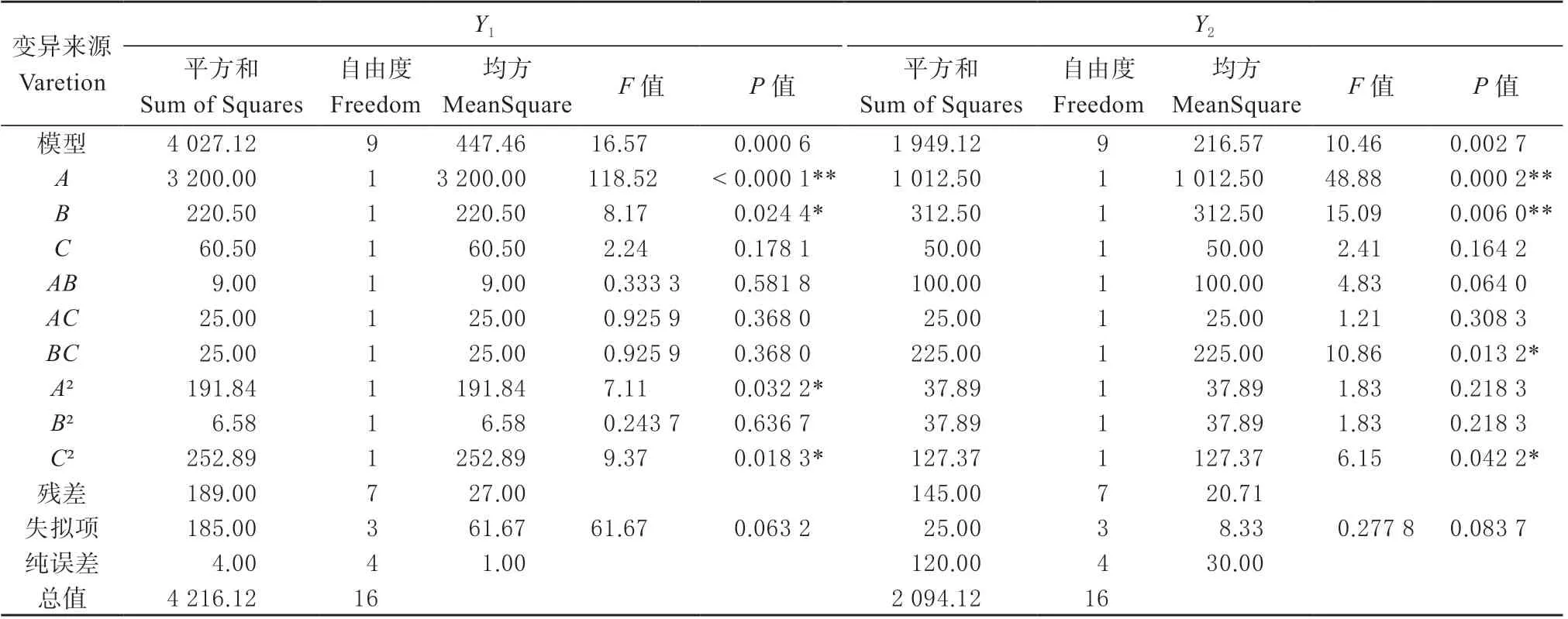
表3 通用旋转组合设计回归方程方差分析Table 3 Variance analysis of regression equation for general rotating combination design
通过软件对切割间隙A、定位口角度B、平台转速C三影响因素进行回归拟合,得出响应值试验响应值Y1、断柄率Y2的3 个响应因子的二次多项式回归数学模型,剔除不显著项,得到数学模型为
据表3 可知,对于纸袋撕口宽度Y1,观察指标的回归数学模型的P值为0.000 6,小于0.01,表明模型的显著性极强;失拟项的P值分别为0.063 2,大于0.05,表明试验误差小,失拟项不显著,回归有效。由方差分析表可知,对纸袋撕口宽度Y1的影响,A极显著、B显著、A2显著、C2显著,影响显著顺序为A>C2>B>A2;对于断柄率Y2,观察指标的回归数学模型的P值为0.002 7,小于0.01,表明模型的显著性极强;失拟项的P值分别为0.083 7,大于0.05,表明试验误差小,失拟项不显著,回归有效。由方差分析表可知,对断柄率Y2的影响,A极显著、B极显著、BC显著、C2显著,且B项与C项对断柄率有交互作用的影响,影响显著顺序为A>B>BC>C2。
为获得断柄切袋装置最佳工作参数,本文以装置设计要求的2 个指标Y1、Y2为目标函数,对工作参数进行优化[25]。运用Design-Expert12.0 软件的优化分析功能对2 个指标的回归数学模型进行优化分析,目标函数为:Y1[35,75];Y2[max];约束条 件 为:X1∈[-1,1];X2∈[-1,1];X3∈[-1,1];通过软件求得满意度最高的参数组合:切割间隙为0.89 mm,“V”形定位口角度为36.5°,旋转平台转速为7.8 r/min。
4 结论
(1)设计了1 种皇冠梨断柄去袋装置并对其关键部件进行了试验和优化。对锯切机构进行了设计研究,对撕袋机械手撕袋路径进行了规划。采用有刷电机驱动的圆锯片实现了对梨柄、纸袋、铁丝的复合体进行锯切。
(2)以切割间隙、定位口角度及平台转速作为变量,断柄率和纸袋撕口宽度作为目标进行了Box-Behnken 试验。利用Design-Expert 软件对试验结果进行方差分析,建立了显著项的回归模型。以断柄率高且纸袋宽度范围为目标优化的装置结构参数为:切割间隙为0.89 mm,定位板“V”形定位口角度为36.5°,旋转平台转速为7.8 r/min。
猜你喜欢
山西冶金(2023年11期)2024-01-07
汽车工程师(2023年11期)2023-11-15
机械工业标准化与质量(2023年7期)2023-09-25
时代汽车(2023年2期)2023-02-11
汽车观察(2022年12期)2023-01-17
石材(2022年4期)2022-06-15
汽车与驾驶维修(汽车版)(2020年6期)2020-07-24
趣味(语文)(2019年9期)2020-01-06
超硬材料工程(2018年6期)2019-01-09
重型机械(2016年1期)2016-03-01