基于Sentinel-1 双极化的鄱阳湖地形提取方法
2024-02-21 04:20:40刘聚涛
江西水利科技 2024年1期
乐 颖,刘聚涛*
(1.江西省水利科学院,江西南昌,330029;2.江西省鄱阳湖流域生态水利技术创新中心,江西南昌,330029)
数字高程模型(digital elevation model,DEM)作为基础数据资料,可以提供地形地貌信息,对水利工程、地质调查、测绘工程、环境评估和城市规划等来说都是必不可少的[1-3]。传统获取数字高程模型的方法往往是需要耗费大量人力进行实地测量,时效性不高,而且无法在短时期内获取大范围的地形结果。随着遥感技术的不断发展,利用遥感卫星影像反演高程信息已经成为可能。自从Sentinel-1 雷达卫星发射成功以来,就引起了学者的广泛关注[4-5]。孙盛等[6]利用23 景Sentinel-1A 数据反演出甘蔗株高,得到了株高参数和甘蔗生长的动态变化规律。杨靖雅等[7]根据Sentinel-1/2 遥感影像识别洞庭湖的单双季稻,提取出单双季稻的空间分布特征。韦嫦等[8]基于多时相Sentinel-1A 影像的后向散射系数和相干系数,对沼泽湿地水面时空变化情况进行了动态监测。乐颖等[9]利用相干系数改进了InSAR技术,提取出赣州市定南县的地形地貌特征。Sentinel-1雷达卫星影像不仅可以为植物、农作物和湿地等研究提供数据支撑,还可以运用合成孔径雷达干涉测量(Interferometric Synthetic Aperture Radar,InSAR) 技术反演数字高程模型。
近年来,随着河湖长制的推广和实施,人们越来越重视河流的健康状况。因此,数字高程模型作为河湖管理的基础数据之一,对于水域边界提取、河湖演变过程、水动力计算与建模等诸多问题具有十分重要的意义。当前,已有部分学者尝试用不同方法反演数字高程模型,均取得一定效果。吴鹏飞等[10]以青藏高原为研究对象,利用LiDAR 技术获取了高山地区高分辨率地形结果。Ye 等[11]根据水文地貌特征等先验知识,构建数字高程模型。张龚泉等[12]根据鄱阳湖湖区周边高程点资料,利用克里金法反演湖底地形。隆院男等[13]利用两种不同的光学影像首先提取出洞庭湖湖区边界,然后根据克里金插值法对水位进行反演。
鄱阳湖作为江西省的重要水系,其生态环境问题一直都是研究热点。而目前已有的地形数据,大多存在时效性差、分辨率不高的问题,鄱阳湖湖底地形数据是开展鄱阳湖湖泊一系列研究的基础,为了避免给相关研究带来不便,亟待更新重建鄱阳湖区域的数字高程模型,但是,如何提取出最新的地形数据是一个值得研究的课题。2022 年,由于鄱阳湖受到持续高温且少雨的影响,比往年提前进入枯水期,浅水区域呈现干涸状态,这为提取湖底地形提供了良好的研究前提。同时,雷达遥感影像包含相位信息,可以根据其来反演DEM。基于此,本文借助Sentinel-1 双极化雷达影像利用InSAR 技术提取鄱阳湖区域的湖底地形,因此,得到的地形结果可以为后续诸多研究提供基础数据支撑。
1 研究区概况及遥感数据
鄱阳湖地理坐标介于115°49′~116°46′E,28°24′~29°46′N 之间,位于江西省北部,是中国最大的淡水湖,湖区由赣、抚、信、饶、修五条大河汇入,经过调蓄后流向长江[14]。鄱阳湖是一个过水性、吞吐性及季节性湖泊,受气候的影响分为丰水期、枯水期和平水期,具有“洪水一片、枯水一线”的独特景观。
Sentinel-1 雷达卫星由A 和B 两颗卫星共同组成,重访周期为6 天,搭载了C 波段合成孔径雷达,具有全天时全天候、覆盖范围广等优势。同时,该卫星还包含了相位信息和后向散射系数等信息,其中相位信息可以用来反演DEM。为了更好的反演出鄱阳湖区域的地形情况,结合其季节性湖泊的特性,本文选取了枯水期时段的Sentinel-1 雷达卫星影像,具体影像参数见表1。在数据处理过程中,本文使用了影像相应的精密轨道数据校正轨道信息从而减少系统误差,同时还借助了分辨率为30m 的SRTM DEM 作为外部DEM 来修正地形相位信息。

表1 雷达影像数据的基本参数
2 利用InSAR 技术反演湖底地形原理
雷达影像具有全天时全天候、覆盖范围广的优势,尤其是不受云雨的影响,这可有效避免多云天气时间段由于数据缺乏对相关研究的影响,从而减少了数据选择的局限性。雷达在获取影像时需要发射能量脉冲的电场矢量,可以发送水平或者垂直偏振信号,也可以接收水平或者垂直偏振信号。通常来说,雷达影像具有四种极化方式:HH、VV、VH 和HV,其中H 代表水平方向偏振,V 代表垂直方向偏振。电磁波的极化对目标的介电常数、物理特性、几何形状和取向等比较敏感,因而极化测量可以大大提高成像雷达对目标各种信息的获取能力。本文利用VV 极化和VH 极化对鄱阳湖地形进行反演,从而提取出完整的地形信息。
由于SAR 雷达影像中具有多种信息,比如与斜距有关的相位信息和后向散射系数,其中后向散射系数为地物目标发生后向散射形成的图像信息。原始雷达影像中包含了参考椭球面相位、大气相位、噪声相位、地形相位和形变相位等五种相位,为了充分利用雷达影像中的相位信息,通常是采用InSAR 技术对原始数据进行一系列处理,从而保留所需要的地形相位信息。InSAR 技术首先需要通过对覆盖同一区域的两景雷达影像进行干涉处理,提取出相应的相位信息,然后再经过滤波、相位解缠、轨道精炼和重去平、相位转高程、地理编码等数据处理,最终反演出数字高程模型。图1 为本文先获取原始影像,再进行数据预处理,然后利用InSAR 技术反演生成最终地形结果的流程图[15]。

图1 实验流程图
3 结果与分析
根据第2 节介绍的方法和数据处理流程,便可反演得到研究区域的数字高程模型,分辨率为13.90m,将原始数字高程模型的分辨率提高了53.67%,反演结果如图2 所示。为了说明研究方法的可行性以及相互对比验证结果的准确性,本文采用了雷达影像中VV 极化和VH 极化两种方式来提取鄱阳湖区域的地形地貌。从图2 中可以看出,VV 极化和VH 极化反演出来的DEM 结果与SRTM DEM 相比,其地物分布特征和地形变化趋势基本一致,这说明利用InSAR 技术反演数字高程模型是可行的。接下来,本文将从可视化和精度分析两方面说明反演结果的精细度和可靠性,以此进一步体现利用InSAR 方法反演DEM 的优势。

图2 不同极化方式反演的DEM 结果
(1)可视化分析。本文分别绘制了SRTM DEM、VV极化方式反演的DEM 和VH 极化方式反演的DEM 山体阴影图,结果如图3 的(a)、(b)、(c)所示。图3 中这三种DEM 的山体阴影图中山区、平地和河流等地物分布特征总体是一致的。且与SRTM DEM 的山体阴影图相比,VV 极化方式反演的山体阴影图和VH 极化方式反演的山体阴影图更加精细,尤其是将河流处的细节保留了下来,在鄱阳湖中心湖区也同样反演出了更精细的DEM 结果。为了更加直观对比说明精细化程度,本文对SRTM DEM、VV 极化方式反演的DEM 和VH 极化方式反演的DEM 分别生成等高线图,这三种DEM的等高线分布情况如图3(d)、(e)、(f)所示。结果表明,利用InSAR 技术反演得到的地形结果可以很好的将鄱阳湖湖底区域这一部分的高程信息刻画出来,并更新重建了该区域的地形情况。

图3 不同极化方式反演的DEM 的山体阴影图及等高线图
(2)精度分析。相干性系数作为反映主、副影像之间的相干程度指标,其值通常介于0 和1 之间,值越大说明影像相干性越好。因此,相干性系数图常用来评价最终反演结果的质量[16]。图4 为VV 极化方式和VH 极化方式的相干性系数图,除了部分河流区域相干性较低外,整体还是比较高,尤其是包含很多建筑物的城市区域。由于在影像采集时采用了不同的极化方式,VV极化方式和VH 极化方式的相干性存在部分差异,比如在鄱阳湖中心湖底区域,VV 极化方式的相干性更高,而VH 极化方式比VV 极化方式的渗透能力更高,在相干系数图中呈现的水体区域面积更大,从而降低了整体的相干性。总体来说,VV 极化方式的相干性比VH极化方式的相干性高,说明VV 极化方式反演的DEM质量更高。因此,相较于VH 极化方式,利用VV 极化方式反演的DEM 效果更优。

图4 不同极化方式的相干性系数图
由于缺少研究区域相对应时间段的高程信息,本文应用线性模型和二次模型这两种数学模型对VV 极化反演出的DEM 结果与VH 极化反演出的DEM 结果进行拟合分析,以此来相互验证结果的准确性,结果如图5 所示。线性模型拟合出的公式为:y=194.07+1.251 0x,决定系数为R2=0.927 7,拟合效果见图5(a);二次模型拟合出的公式为:y=209.08+1.312 8x+0.000 4x2,决定系数为R2=0.943 3,拟合效果见图5(b)。根据决定系数的大小可以得出,采用二次模型对VV 极化反演出的DEM结果与VH 极化反演出的DEM 结果的拟合程度更高,该模型为最优拟合模型。综上所述,VH 极化和VV 极化这两种极化方式反演出的DEM 结果相似性很高,均可以准确反演出研究区域的地形结果。
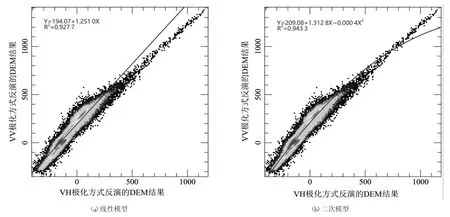
图5 VV 极化和VH 极化反演的DEM 结果数学拟合分析
4 结 论
本文以鄱阳湖为例,通过借助四景Sentinel-1 雷达影像并利用InSAR 技术对鄱阳湖湖底地形进行反演,采用VV 和VH 两种不同极化方式更新重建了数字高程模型,并从可视化和精度两个方面对地形反演结果进行了分析,以山体阴影图和等高线图两种形式定性说明了本文反演出来的DEM 结果比原有的SRTM DEM 更加精细,同时借助相干系数图和拟合结果定量评价了VV 极化方式和VH 极化方式反演的DEM 结果,可以得到以下几点结论:
(1)利用InSAR 技术反演数字高程模型是可行的,其反演出来的DEM 与SRTM DEM 相比,地物分布特征和地形变化趋势基本一致。
(2)借助雷达影像反演出的DEM 可以很好的将鄱阳湖湖底地形情况呈现出来,分辨率为13.90m,而参考SRTM DEM 的分辨率为30.9m,与其相比分辨率提高了53.67%,以此说明提取出来的地形结果比参考DEM 更加精细。
(3)根据山体阴影图、等高线图、相干系数图和数学拟合模型等四个方面综合比较得出,VV 极化方式反演的DEM 结果比VH 极化方式反演的DEM 结果效果更优,其中二次模型为最优模型,根据模型拟合决定系数可知,拟合程度为0.943 3。
本文采用的遥感影像为雷达影像,后续可以结合光学遥感影像对数字高程模型进行提取。同时,还可以利用更新重建的DEM 结果为河流边界提取、地质地貌反演、地表形变监测等研究提供基础数据资料。
猜你喜欢
水利水电快报(2022年7期)2022-07-18 01:02:40
现代财经-天津财经大学学报(2022年5期)2022-06-01 06:08:32
原子与分子物理学报(2021年2期)2021-03-29 07:31:38
现代出版(2019年6期)2020-01-14 02:20:36
电子测试(2017年15期)2017-12-18 07:18:51
测绘学报(2017年1期)2017-02-16 08:24:44
老友(2017年4期)2017-02-09 00:26:04
天津体育学院学报(2016年3期)2016-12-18 08:24:38
电源技术(2015年1期)2015-08-22 11:16:18
测绘科学与工程(2014年6期)2014-02-27 07:06:21