基于微处理器和多通信方式的大坝变形智能监测仪器的设计与实现
2024-02-21 12:21周芳芳杜泽东
长江科学院院报 2024年2期
周芳芳,张 锋,杜泽东,胡 超
(1.长江科学院 工程安全与灾害防治研究所,武汉 430010; 2.水利部水工程安全与病害防治工程技术研究中心,武汉 430010; 3.国家大坝安全工程技术研究中心,武汉 430010; 4.中国三峡建工(集团)有限公司,成都 610041)
0 引 言
安全监测是保障水利工程安全稳定运行的重要技术措施,是实现智慧水利的基础环节和前置条件。变形监测由于其直接获取建筑物结构在外荷载作用下的位移(或形变)响应行为,因而能够直观反映建筑物的安全性态。同时,由于变形监测数据的物理意义相对明确,便于理解,可靠性相对容易保证,因而变形监测数据通常也被用于佐证其他类型监测数据(如渗流、温度等)的合理性及可靠性[1]。
鉴于变形监测的重要性和基础性,工程界对变形监测技术的研究起步相对较早[2],目前大坝水平位移自动化监测主要使用引张线法、真空激光准直法及垂线法,如步进电机式、式的引张线仪和垂线坐标仪等仪器已在大坝工程实践中广泛应用[3]。
大部分电荷耦合器件(Charge Copled Device,CCD)式垂线坐标仪具有采集、存储功能,运用发光二极管(Light-Emitting Diode,LED)显示及RS485通信方式进行数据读取,但不支持现场配置、实时采集、历史数据查看,无直接远程交互功能,需要接入其他采集装置或转接设备才能进行远程通信[4]。
针对现有仪器存在的问题,本文设计了一种基于微处理器和多种通信方式的大坝变形智能监测仪器,即智能CCD式垂线坐标仪。仪器运用微处理器及以太网接口,不需要接入其他采集设备,可直接接入软件系统,解决了仪器集成复杂、传统通信方式不稳定等问题;并运用蓝牙通信和智能手机APP,解决了现场参数配置、采集数据实时读取的问题;同时提出了一种反馈式自适应调光技术,提高了仪器的自适应能力和稳定性。
1 原理及总体结构
智能CCD式垂线坐标仪与专用的垂线配套使用可对大坝、船闸、高层建筑等不同高程的水平位移变化进行精密测量[5]。
仪器运用微处理器及多个功能模块,实现了光源自动调节、线阵CCD信号采集、信号处理、数据存储和通讯交互的一体化设计,仪器智能化程度高,改变了传统监测仪器需与专用采集单元配合使用的繁琐,便于快速集成到工程安全监测自动化系统。
仪器利用投影原理,通过平行光照射将垂线在相互垂直的两个线阵CCD器件上各自产生一个投影,依据线阵CCD器件不同像素点感光度的差异性,通过对应像素点输出值的不同判断垂线被遮挡的像素点,确定阴影的位置值[6]。
光路投影原理虽已应用于市面上大多数CCD式引张线仪和垂线坐标仪,但本文在原有技术的基础上,提出了一种反馈式自动调节光照强度的方法,可显著提升光源的自适应性,提高采集数据的稳定性,垂线坐标仪的光路和结构原理如图1所示。

图1 垂线坐标仪光路原理和结构示意图Fig.1 Schematic diagram of optical path and structural diagram of vertical coordinate instrument
由于工程应用环境湿度较高,仪器采用密封防潮结构进行封装,包括电源板、主控板、LED显示板,以及x轴和y轴分别对应的点光源板、透镜板、线阵CCD采集板。点光源板的光源位于透镜的焦点处,光线通过菲涅尔透镜后形成平行光,照射到垂线上后再照到线阵CCD上,依据线阵CCD所有像素点的输出电压进行滤波、阈值设置、区间判断等,计算垂线在单轴上的水平位置,两个轴的原理一致。
根据计算垂线在两个轴的投影位置具体值,定位垂线的平面坐标(x,y),将垂线坐标仪安装完毕的首次测值(x0,y0)作为初始测值,当垂线坐标仪所在测点观测墩相对于垂线变化时,垂线坐标仪的测值将发生变化,变化后的测值为(xi,yi),变化量Δx和Δy为该测点观测墩相对垂线的位移变化量[7]。其表达式分别为:
Δx=kx(xi-x0) ;
(1)
Δy=ky(yi-y0) 。
(2)
式中kx、ky为位置关系系数,为1或者-1。
kx、ky的取值以及每个测点的绝对位移,将根据正垂、倒垂的类型和垂线坐标仪的安装位置确定。
2 线阵CCD信号采集及处理
2.1 硬件设计
线阵CCD信号采集及处理由主控板配合光源产生、光源控制、CCD采集等电路共同完成。主控板是仪器的核心,其他电路板的控制均由主控板输出的控制信号进行控制及交互,主控板的电路示意如图2所示。主控板包括微处理器、FLASH芯片、RTC实时时钟芯片、温湿度传感器、蓝牙通信模块、以太网通信模块、电源管理模块、x轴线阵CCD采集控制接口、y轴线阵CCD采集控制接口、x轴点光源控制接口、y轴点光源控制接口、LED显示控制接口。

图2 垂线坐标仪电路示意图Fig.2 Circuit diagram of vertical coordinate instrument
微处理器芯片选用的是32位的STM32F407VET6,为采集装置提供了卓越的计算性能和先进的响应中断的能力[6]。本文选用的线性CCD是高速扫描、线性阵列的图像传感器,2 592个像素点对应54.9 mm的扫描长度。
主控板的微处理器运用接口与线性CCD模块进行交互,按照模块的控制时序输出相应的时钟和控制信号,按照模块的时序要求,线阵CCD采集模块会输出固定时间长度且一定范围内的电压,微处理器通过内置的ADC(模/数转换器)对电压按时序进行采集,每个时钟输出的电压对应的是线阵CCD每个像素点的感光值,垂线会遮挡一部分平行光,有一部分像素点的受光强度程度较弱,对应采集值也偏小。
由于光路的散射和折射原理,被遮挡的采集值并不是根据垂线直径大小推算的理想数据,需将数据进行滤波及算法处理后,才可定位垂线的位置。
2.2 嵌入式软件设计
仪器应用的微处理器芯片使用C语言进行嵌入式编程。由于垂线坐标仪具有数码管显示界面,需要不断采集当前垂线的位移值,因此在保证设定的采集时间及通讯指令触发采集的同时,还需不断进行实时采集,通过数码管界面进行显示。
采集指令主要包括线阵CCD采集模块的控制指令和LED灯的控制指令。为保证仪器测量的可靠性,防止两个轴的平行光相互影响,两个轴的采集控制需轮流进行。
微处理器在上电时会进行各个功能的初始化处理,具体的主程序流程如图3所示,在循环程序中读取通信指令的标志位及设定采集时间到的标志位;读取到通信指令的标志位时,会按照通信指令进行相关指令的操作;读取到设定采集时间标志位时,会依次使能2个线阵CCD采集模块,采集当前的数据,数据处理后按自定义的数据格式进行存储;未读取到指令时,会依次使能2个线阵CCD采集模块,采集当前数据,但不进行存储,而是通过数据管进行显示。

图3 主程序流程Fig.3 Flow chart of main program
事件策略将进行环境量参数的识别及自动分析,根据现场情况及已测量的数据进行分析后,启动自适应调光机制或根据阈值报警机制自动修改时间策略,减少仪器采集时间间隔,应对汛期等高频次采集需求。
线阵CCD采集数据的处理运用微处理器的嵌入式编程实现,通过采集数据的分析、异常数据过滤、阈值确定、阴影数据选定、范围计算等步骤,从而确定垂线坐标仪单个轴的位置,另一个轴运用同样的方式,但两个值在初测完成后,需要采用结合校准参数计算后才能输出有效值。
3 多通信方式
智能CCD式垂线坐标仪具有以太网、RS485、蓝牙3种交互方式,由于RS485为市面上垂线坐标仪常用的通信方式,本文不再赘述。
3.1 以太网通信
微处理器通过串行外设接口(Serial Peripheral Interface,SPI)与以太网控制器交互实现以太网通信,硬件结构如图4所示,MAC模块实现符合IEEE 802.3标准的 MAC 逻辑,PHY(物理层)模块对双绞线上的模拟数据进行编码和译码,网络变压器起到隔离和增强信号强度的作用。每台仪器均有一个独立的IP地址,微处理器将采集的数据通过以太网的方式进行远程传输,可自由组网使用,也可直接接入软件系统。

图4 以太网通信模块硬件结构Fig.4 Hardware structure of Ethernet communication module
仪器通过TCP/IP以太网通讯方式组网时,其网络连接如图5所示,连接时可以使用带屏蔽的电缆或通讯光纤,以防止电磁干扰。使用TCP/IP以太网通讯方式连接组网时,需选择路由器或光纤交换机等集线装置。
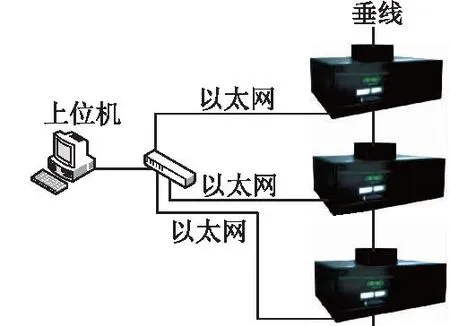
图5 以太网组网通信Fig.5 Ethernet networking communication
3.2 蓝牙通信及手机APP设计
微处理器通过TTL电平的UART接口与蓝牙通信模块交互,运用BLE4.2的通信协议与手机通信[8]。本文设计的手机APP,可现场配置仪器的通信、运行等参数,并实现实时采集垂线数据、查看历史数据等功能。
仪器连接后的参数设置主要包括设备类型、通信方式、采集模式、间隔时长、线的外径、设备对时、数据管理选项等,如图6所示。

图6 手机APP界面Fig.6 Interface of mobile phone application
设备读取成功后,除设备基本信息外,还会实时显示设备所处环境的温湿度情况。查看历史数据时,x、y两个测值表示垂线坐标仪2个方向的位移变化量,可根据起始时间选择对应时间段的数据进行查看。
4 反馈式自适应调光技术
目前大部分CCD式垂线坐标仪应用LED灯作为光源进行线阵CCD采集时,一般采用滑动电阻手动调配LED灯的光照强度,由于LED灯的出厂批次不同,适配的电阻值存在较大差异,用手动方式进行调节时繁琐复杂,需人工肉眼判断光照强度,并依靠调试人员的经验,人工查看线阵CCD当前采集值进行核对,调节误差范围较大,影响仪器测量精度。且此方法只能在设备安装前进行,一旦设备安装完毕,就没办法修改光源强度,到现场应用后因为现场环境对平行光产生影响时,平行光强度没办法做出改变和适应。
本文提出了一种CCD式垂线坐标仪自适应调光机制,通过数字电位器、光源、透镜、线阵CCD传感器形成反馈式自适应调光控制系统,光源通过透镜后产生平行光,微处理器运用梯度分类、阈值判定、中值滤波等算法,对线阵CCD的像素点进行特征值提取和特征值分析,自动识别光源强度,从而控制数字电位器,实现平行光光源强度自动调节,调光机制流程如图7所示。

图7 基于线阵CCD的自适应调光机制流程示意图Fig.7 Schematic diagram of adaptive dimming mechanism flow chart based on linear CCD
数字电位器选用型号为AD5231,具有10 kΩ的电阻调节范围,微处理器按照数字电位器的控制时序对其进行控制和输出电阻调节。
自动调光时不再借助其他感光设备,而是通过仪器选用的线阵CCD进行光照强度识别。当平行光照射到线阵CCD时,线阵CCD输出原始采集数据到微处理器,即每个像素点对应输出一个电压值。微处理器对原始值进行分类、判断、滤波等算法,分析线阵CCD的像素点的特征,而动态调整数字电位器的输出值,从而实现平行光光源强度自动调节。微处理器的处理流程如图8所示。

图8 微处理器自适应调光的程序流程Fig.8 Program flow chart of microprocessor adaptive dimming
通过编写手机APP程序,将垂线坐标仪的自动调节功能运用手机APP使能,也可根据现场光线实时判断,自动触发调光功能。APP使能如图9所示,按APP界面中“设置”按钮即可对垂线坐标仪的x轴和y轴进行自适应调光处理,无需人工参与,即可自动设置光强度为适合采集的状态,提高仪器测量精度的同时,仪器出厂效率也明显提升。

图9 手机APP使能自适应调光功能Fig.9 Mobile phone application with adaptive dimming function
5 试验与应用
5.1 试 验
测量试验前先按照文中提出的反馈式自适应调光方法进行光源调节,将光源调到合适亮度后,再进行垂线采集。无需每次采集都进行调光,调光一般是在出厂前,以及每年的仪器维护时进行。
本次试验采用直径为1.6 mm钢丝作为垂线,根据本文选用的线性CCD模块的特性,2 592个像素点对应54.9 mm的测量范围。按照平行光照射物体产生阴影的理论,从理想状态来看,直径1.6 mm铟钢丝应遮挡76个像素点的光线。但由于点光源是球形LED灯,无法使初射光线仅从焦点处射出,无法实现理想状态下的平行光,同时光散射及折射的影响,2个轴的线阵CCD采集的实际值与理想值存在差异。
将垂线随机放置于本文研制的垂线坐标仪的测量区域内,x轴和y轴是水平面上2个相互垂直的方向,2个方向的线阵CCD采集到的测量数据分别如图10所示。

图10 x轴和y轴线性CCD模块采集值Fig.10 Collected values of x-axis and y-axis linear CCD module
从测量结果看,x轴线性CCD模块从像素点1 257采集值开始逐渐减小,像素点1 390采集值逐渐恢复,从采集值可以定位垂线在x方向的位置。当垂线沿x方向移动时,阴影范围会偏移,采集值会发生变化,本文运用微处理器实现采集值滤波,滤除非阴影处的毛刺电压,通过所有电压值与阴影处电压值的对比确定阈值,运用阈值确定阴影范围后计算特征值定位垂线在x方向的位置。垂线的测量范围确定为50 mm,定义的0 mm起始点并非是有效长度为54.9 mm的线阵CCD的起始点,起始点会根据测量范围进行偏移,本次垂线x轴的计算后的输出值为25.71 mm,即x轴的坐标值。
从测量结果看,y轴线性CCD模块从像素点1 730采集值开始逐渐减小,像素点1 890采集值逐渐恢复,从采集值可定位垂线的在y方向的位置,当垂线沿y方向移动时,阴影范围会偏移,采集值会发生变化,y轴同样运用微处理器实现采集值滤波、阈值判断、特征值计算等定位垂线在y方向的位置,本次垂线y轴的输出值为36.07 mm,即y轴的坐标值。
由于x轴和y轴并非理想平行光输出进行采集,初始测值并不能直接用于最终测值输出。试验时会对光路进行微调,但由于LED灯本身的光路特性,光源并非位于透镜焦点处的点光源,无法调节成理想平行光,垂线和线阵CCD间的距离,对垂线在线阵CCD上的成像范围会有一定影响。
在平行光路不便于有限安装环境内再调节的情况下,本文运用校准的方式进行误差修正。将垂线坐标仪放置于水平面2个垂直方向均可移动的滑台上,滑台通过步进电机控制移动距离,采用光栅尺进行位移反馈。校准时垂线固定不变,垂线坐标仪按照3~5 mm位移间隔依次进行2个方向的平移和每个定位点的初始测量,所有测值按照最小二乘法进行校准后得到校准参数,使用手机APP将校准参数写入仪器,再次测量时垂线坐标仪依据校准参数计算后输出位移值,测量结果满足仪器精度要求。
5.2 工程应用
南漳峡口水电站位于湖北襄阳,为沮河干流上的控制性枢纽,枢纽工程主要由混凝土拱坝、右岸发电引水隧洞、地面厂房和开关站等组成,大坝为双曲拱坝,坝体水平位移监测采用3组垂线,共计3条倒垂、2条正垂,11个测点。每个测点安装了一台本文研制的智能CCD式垂线坐标仪,用于远程自动读取垂线的水平位移量,工程应用如图11所示。

图11 南漳峡口水电站工程应用Fig.11 Application to Xiakou hydropower station in Nanzhang County
通过研发的软件系统可实时查看每个测点的采集值和历史变化曲线,如图12所示。

图12 垂线坐标仪工程应用远程软件界面Fig.12 Remote software interface for engineering application of vertical coordinate instrument
6 结束语
本文改变了传统CCD式垂线坐标仪仅作为传感器的测量思路,研制的大坝变形智能监测仪器集垂线位置数据采集、处理、存储和通信于一体,提高了变形监测仪器的集成度和可靠性,通过反馈式自适应调光技术的设计与运用,可显著提升光源的自适应性,提高采集数据的稳定性。基于蓝牙通信和以太网,结合自主研发的智能手机APP和web端平台,既解决了现场参数配置、采集数据实时读取的问题,又为仪器远程采集、配置和数据管理提供稳定方式,为直观反映大坝建筑物的安全性态提供了有力技术支撑。
猜你喜欢
新世纪智能(教师)(2021年2期)2021-11-05
小学生学习指导(中年级)(2021年10期)2021-11-01
海洋通报(2021年2期)2021-07-22
中国交通信息化(2020年5期)2021-01-14
测控技术(2018年5期)2018-12-09
中国交通信息化(2018年9期)2018-11-09
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
电子制作(2017年17期)2017-12-18
自动化学报(2017年11期)2017-04-04