地铁全自动运行模式下司机配置方案研究
2024-02-17 00:00:00刘光勇
交通科技与管理 2024年24期


摘要 全自动运行系统给地铁的传统运营管理模式带来较大挑战,司机岗位的职能发生改变,需要进行岗位调整与人员分流。文章首先基于深圳地铁20号线的管理运营经验和需求,根据全自动运行系统特征,提出了四种调整司机岗位的管理方法;然后通过综合评价分析,选出司机与车辆检修工岗位融合的最优方案;最后通过20号线的实际运行情况,验证了岗位融合配置方案的可行性。
关键词 地铁;全自动运行;岗位融合;司机配置
中图分类号 U29-3 文献标识码 A 文章编号 2096-8949(2024)24-0177-04
0 引言
全自动运行系统(FAO)融合了通信、计算机、控制、系统集成等技术,实现了列车行驶全过程与调度管控的无人化、自动化,代替了传统列车运行模式下的司机职能[1-2]。《中国城市轨道交通全自动运行系统技术指南(试行)》提出[3],可将轨道交通线路的自动化运营程度定义为5个等级,从低到高依次为GoA0至GoA4,其中GoA3是有人值守下的全自动运行(DTO),GoA4是无人值守下的全自动运行(UTO),以上两个等级均属于全自动运行模式。
GoA4等级的全自动运行模式对技术和管理要求严苛,在设备系统层面要求高度集成化、自动化和智慧化,安全防护层面要求高可靠和高冗余性,中心控制层面要求实时性和全过程覆盖[4]。由于GoA4等级的极高要求较难满足且需要实践验证,通常情况下以FAO标准建设的轨道交通线路在运营初期通常会选择GoA3等级作为过渡[5]。运行模式的改变通常伴随着岗位变动与人员分流,岗位需要匹配系统的自动化水平要求,且能够及时响应故障与安全事故,在需要时通过人工介入以提高系统可靠性,由此引出了岗位配置与员工技能培训的难题。
全自动运行线路在运营期间存在从GoA3等级过渡到GoA4等级的阶段,该文研究该阶段下司机岗位的职能变化与岗位配置的变更情况,通过对比分析多个过渡方案,结合深圳地铁全自动运行线路20号线的管理实践经验,选出其中稳定可控、效果显著的可行方案。
1 自动化运行等级提升的过渡方案
1.1 GoA4等级的特征与技术要求
地铁全自动运行等级GoA4采用UTO模式,比现有的基于通信的列车运行控制(CBTC)系统具备更高的安全性和运行效率[1]。GoA4等级对设备、人员、通信、系统、中心控制等各方面要求极高,对比CBTC系统具有如下鲜明特征:
(1)设备系统层面集成化、自动化、智慧化。GoA4等级的全自动运行要求信号、车辆、通信、站台门、综合监控五大行车核心专业设备应满足智能协调、联合控制的效果,实现智能协同应急响应与辅助决策。通过设备与系统的智能协调控制,车载信号具备蠕动运行、远程重启、远程限速等模式作为应急协同控制方式。进一步地,GoA4等级的全自动运行可实现全过程闭环的综合运维管理,自动完成唤醒、自检、出库、正线运行、回库等运维流程。
(2)安全防护层面高可靠、高冗余性。为保证FAO系统的稳定与安全,需通过车辆与站台门的协调控制与正线的实时监控,以实现轨行区的全封闭管理。同时,GoA4等级要求对线网、隧道及轨道进行实时、高速、高精度的自动化缺陷检测和报警。最后,中心控制的远程监控也是维持FAO系统安全的主要组成部分。
(3)中心控制层面实时性、全面、全过程。中心控制的综合监控作为串联车辆、电力、人员、维修等调度的总线,需要通过高度智能化的数据传输与实时渲染,保证监控数据的瞬时刷新与短周期,为中心控制提供实时性、全过程的辅助决策和应急联动。此外,中心控制还应兼顾列车操控、环境感知和乘客服务,给出全面的智能化协调控制解决方案。
总而言之,GoA4等级下的专业设备需要具备高自动化水平、高可靠性,同时要求正线段场的行车一体化、中央调度指挥的一体化,且满足无人驾驶、无人值守的安全要求。在GoA4等级的全自动运行模式下,原司机岗位职责将被智能调度与自动化设备取代。
基于多种因素考量,尤其在岗位调度管理方案可行性与专业设备可靠性未经实际运营检验的前提下,深圳地铁20号线在开通初期并不会直接实施GoA4等级的无人值守运行模式,而是先依据GoA3等级的有人值守运行模式实施运营,依靠管理手段逐步实现自动化运行等级的提升,未来通过多次专项评估与调整平稳过渡至GoA4等级。
1.2 全自动运行模式过渡阶段的方案对比
深圳地铁20号线在运营初期选择有人值守运行模式,该模式下的部分场景中需要值守人员快速介入,例如调试阶段及运营前期需对设备系统、安全防护和中心控制的各层面进行验证优化,此外在非正常情况下(降级模式下的驾驶、救援、区间迫停疏散)需现场就地控制,因此仍有必要设置司机岗[6-8]。在此前提下,全自动运行系统中的司机岗位与既有线相比有较大差异,因此需要通过岗位复合保证生产工作的饱和度,还需要优化人员配置并重新定位和培养综合技术人员,以适应全自动运行系统的特点。
在以GoA3等级自动化运行的前提下,根据深圳地铁既有线上的司机岗位配置现状,该文提出如下四个备选的司机岗位调整方案,以适应全自动运行模式的要求:
方案一:司机专岗。在既有线司机管理模式及岗位配置基础上,考虑FAO系统中值守人员工作饱和度不足的情况,将仍然保留司机专岗负责值守列车运行,通过核减岗位数将原有的5.8人/车的人车标配比进一步降低。该方案的优点,一是与既有线保持相同的岗位配置,确保了队伍的稳定可靠,便于运行管理;二是目前的岗位培训体系已经成熟,司机专岗专职无需额外培训。该方案的缺点很明显,一是与全自动运行模式需求及运行改革的方向不匹配;二是司机负责的业务单一,导致后续阶段转岗难度大。
方案二:司机与站务员融合。将列车司机与车站站务员的职能复合,统一归属站务管理,司机在不改变列车值乘方式的前提下,兼顾站务员部分的关联业务。预计在沿线站点均预留该复合岗位,每站配置4名多职能司机。该方案的优点,一是司机与站务员同属客运服务方向,其业务具有一定的互通性,在岗位融合后便于运行管理;二是司机归属站点管理,可以实现属地管理一体化,在处理行车故障时可通过站-车应急联动提升处置效率。该方案的缺点,一是车站工作的固定性与司机工作的流动性存在矛盾,导致岗位融合难度较大;二是车站需为司机复合岗预留岗位配置,影响车站正常运转,且在车站编制已满的情况下无法为司机调整岗位。
方案三:司机与车辆检修工融合。将司机与车辆检修工的岗位融合,合并构成新岗位“车辆运维工”,负责车辆调整、车辆检修、故障处理及降级模式下的驾驶、救援、区间迫停疏散等工作。该方案的优点是可降低用人成本,提高生产效率,保证应急处置的安全高效,同时司机的工作范围扩大,可为其提供广阔的转岗空间。该方案的缺点是强调操作性的司机岗位与强调技术性的维修岗位,在业务范围上无重合点,难以直接进行业务融合,需要提出针对该复合岗位的培训方案,并敦促员工接受转岗技能培训。
方案四:随车值乘外包(劳务公司/厂家驻点)。随车值守人员可通过第三方劳务派遣公司招聘,或从车辆厂家的驻点人员中选拔,在地铁公司骨干员工的派驻管理下,高效稳定地培养输出合格司机。深圳地铁仅负责列车运营,由劳务派遣公司或车辆厂家的专业团队负责值守司机的管理工作。在值乘外包的前提下,安全卡控工作需由车辆检修工与值站人员负责,例如车辆检修工需要进行人工驾驶压道测试,值站人员需具备列车引导资格且在降级模式下随车监督。该方案的优点,一是外包值乘人员不占用编制,地铁运营方可以灵活用人;二是降低了用人成本;三是通过劳务派遣公司校招或在社会就业者中择优录取,通过车辆厂家专业的人力资源管理,可保证值乘队伍具有较高素质;四是保留了司机与列车安全员岗位融合的可能性。该方案的缺点是外包队伍相对于正式编制员工的稳定性不足。
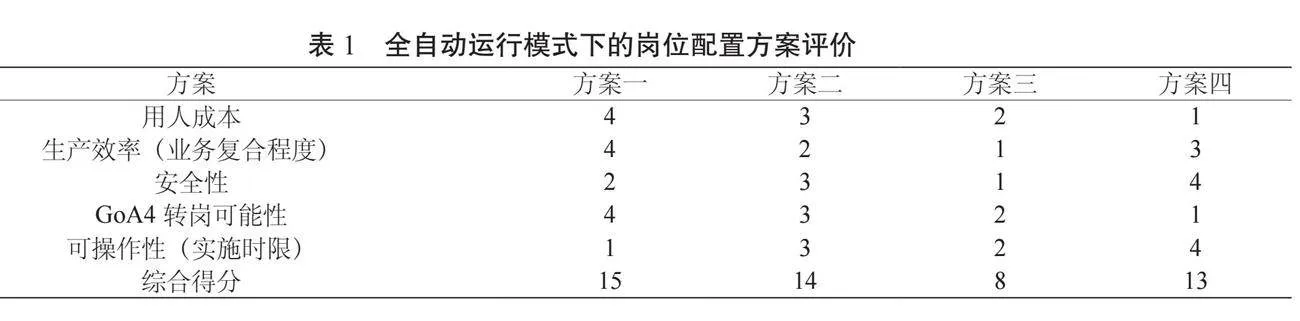
采用专家评分法为全自动运行模式过渡阶段的司机岗位配置方案进行综合评价,通过直观的评价分数分析各方案的优劣,并据此选出最适合深圳地铁20号线的岗位配置方案。如表1所示,专家打分采用5分制,且分数越低代表该方案在对应项目上更有优势,因此综合得分最低的方案即最优方案。
由表1可知,深圳地铁20号线应选方案三,即司机与车辆检修工融合作为GoA3等级下全自动运行模式过渡阶段的岗位配置方案。同时,若能通过规范化安全卡控解决安全问题,并在运营的同时开展值乘外包培训,提高方案四在安全性与可操作性方面的优势,则可将方案四作为过渡至GoA4等级前的最终方案,全面降低UTO模式下的人员转岗难度。
1.3 备选方案的实施路线
根据该文1.2部分对各类岗位配置方案的综合评价结果,深圳地铁20号线在GoA3等级下可采用司机与车辆检修工融合或随车值乘外包的方案。如图1所示,两个方案在经过数年的实践验证后需要进行相应的专项评估,在评估合格的情况下深圳地铁20号线可考虑将自动化运行等级提升至GoA4。
2 地铁司机岗位融合配置情况
2.1 深圳地铁20号线运行模式与岗位配置问题
在列车自动化等级逐渐提升的背景下,司机是受影响最大的岗位:GoA2等级的半自动列车需要司机监视和操控;GoA3等级的DTO模式中司机的职能被淡化,需兼顾随车值守职责;GoA4等级的UTO模式不需要值守人员。在GoA3等级的运营模式下,若由传统的司机岗位完成值守工作,会造成人员冗余和劳动力浪费,且对应的人员配置难以直接过渡到GoA4等级。
深圳地铁的四期建设规划及其调整线路(包括20号线、16号线、14号线及6号线支线)拟采用FAO模式建设和运行,其中20号线已于2021年12月底率先开通运营[9]。20号线作为深圳地铁最先试行全自动运行模式的线路,为保证列车运行由传统的司机驾驶模式向DTO模式、UTO模式的平稳过渡,20号线在车辆和站点人员配置上需做出适应性调整:司机与车辆检修工融合。
2.2 基于职能融合的司机岗位架构模式
考虑专业协同性和空间布局因素,20号线将司机与车辆检修工的岗位融合,合并成新岗位“车辆运维工”,在囊括原有职责的前提下,根据全自动运行模式做出优化调整,包括车辆调整、车辆检修、故障处理及降级模式下的驾驶、救援、区间迫停疏散等工作。
融合后的具体岗位所需人员显著减少。传统的司机岗位需随列车在正线两端折返,且根据具体职责分为设备员、督导、队长、组长等岗位;融合后的车辆运维工岗位仅保留传统模式下的队长职责,并优化调整为班组长岗位,班组长仅需值乘列车一端折返。
2.3 岗位融合可行性分析
深圳地铁20号线在规划设计阶段便督促相关岗位人员进行跨岗培训,运营初期阶段全面应用司机与车辆检修工融合的岗位架构模式,其可行性得到了初步检验。
(1)人力成本。传统岗位配置人员数量与运行列车数量相关:20号线运营初期计划配属9列车,其中7列上线运行,每列车配8节车厢,传统岗位平均每节车厢标配0.54名检修工,每列上线运行列车标配5.8名司机,共需39名检修工和41名司机。实行岗位融合策略的20号线将原班组进行调整重组,最终保留车辆运维工47名,由22名原检修工和25名原司机划转构成。如表2所示,传统模式20号线的人车配比为8.9人/车,岗位融合后的人车配比降为5.2人/车,岗位数量降幅达到41.3%,按深圳地铁12.8万元/人的平均薪资水平测算,岗位融合方案每年可节省422.4万元的人力成本。
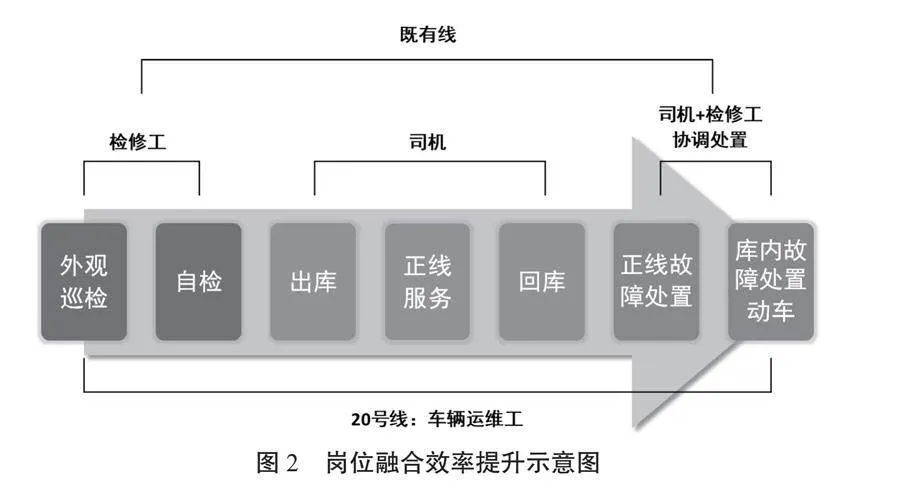
(2)效率提升。依托全自动运行模式的全过程最优化、自动化控制及可靠的安全防护功能,司机与检修相关岗位的工作强度将显著降低,保证车辆运维工可单岗完成列车的运检及故障处理等一系列作业。如图2所示,传统岗位配置需分中心、分岗协调作业,检修工与司机分别负责列车运营的不同阶段,在突发状况如正线故障处置或库内故障处置动车时,需两岗协调作业,在此情况下职能差异和专业技能的不对称将显著降低协调作业的效率;在岗位融合后,车辆运维工可单岗覆盖列车运检的全工作流程,既可保证车辆运维工生产工作的饱和度,又能提高作业效率。
(3)安全保障。车辆运维工在熟练掌握行车流程和列车驾驶技能的同时,还熟悉车辆性能,掌握车辆维护技术,复合的技术储备可保证运维工在突发情况下具有独立解决问题的能力,如降级模式下的手动驾驶列车、线路突发情况下的应急处置,以及值乘列车上的乘客救护等。车辆运维工依靠技术融合优势和安全理念,在故障处置方面较既有线的优势更大。
(4)融合程度。深圳地铁20号线运营初期采用岗位融合的运营模式,相应岗位的人员经过前期培训与实际工作磨合,基本达到预期的岗位工作标准。原25名司机划转车辆运维工后均可完成日常列车外观及车辆功能的巡检作业,具体包括列车巡视(客室外观巡查)、列车回厂后的车下检查、制动自检等内容,实行作业质量“结果控”,确保检修作业的高质量。原车辆检修专业人员划转车辆运维工22人,其中14人(63.6%)可达到库内转轨、列车连挂、试车线低速调车等作业要求。经后期再次评估鉴定,目前车辆运维工已同时掌握列车驾驶与车辆维修技能,其日常工作均可实现单人单岗作业。
深圳地铁20号线的实践验证表明,司机与检修工岗位融合虽仍存在待解决的问题,但总体符合线路运营的基本目标,有待进一步解决的是岗位融合后的岗位不对等问题,即司机与维修工岗位不对等。在融合过程中需突破跨岗技术壁垒,原司机岗为客服类型,对操作技术熟练度要求高;原检修岗为技工类型,对专业技术要求高,后续还需进一步有针对性地优化岗位融合方案。20号线的岗位融合方案是对未来业务融合与人员分流做出的有力尝试,可以预见未来运营模式提升至GoA4等级后,车辆运维工岗位可实现车辆专业岗内部的动态平衡分流,达成GoA3等级平稳过渡至GoA4等级的预期设想。综上所述,20号线的运营实践证实车辆运维工的岗位融合模式具备可行性。
3 结语
为有效发挥全自动运行系统的优势,地铁运营相关部门应尽早启动岗位分流规划和人员技能扩展培训等方面的研究,将管理模式改革与列车自动运行设备升级同步进行,保证地铁运营模式的平稳顺利转型。深圳地铁新线路自动化等级由GoA3升级为GoA4的过程,深刻影响地铁司机的职能范围与工作饱和度,司机岗位的率先改革为其他岗位指明了一条强技能、多职能、跨专业的优化调整路线。20号线的岗位融合尝试为深圳地铁四期建设规划线路的全自动运行模式改革提供了实践参考,可指导后续线路提前谋划岗位优化调整、开展技能培训,尽早实现GoA4等级的全自动运行。
参考文献
[1]宁滨,郜春海,李开成,等.中国城市轨道交通全自动运行系统技术及应用[J].北京交通大学学报, 2019(1):1-6.
[2]郜春海,王伟,李凯,等.全自动运行系统发展趋势及建议[J].都市快轨交通, 2018(1):51-57.
[3]中国城市轨道交通协会.中国城市轨道交通全自动运行系统技术指南(试行)[Z].北京, 2019.
[4]陆鹏.城市轨道交通全自动运行系统岗位设置的优化[J].城市轨道交通研究, 2019(S2):46-48+53.
[5]马伟杰,王伟雯.上海轨道交通10号线全自动运营实践及启示[J].城市轨道交通研究, 2019(S2):1-5.
[6]银益辉,雷成健,刘泽.ATO设备故障时列车全自动运行技术方案研究[J]. 控制与信息技术, 2021(6):30-34.
[7]谭文举.轨道交通全自动运行条件下运营场景设计及智能运维研究[D].北京:北京交通大学, 2020.
[8]郑磊,蓝亮文.跨坐式单轨无人干预列车运行(GOA4)级全自动运行系统安全风险管控研究[J].城市轨道交通研究, 2023(2):81-85.
[9]陈敏玮,黄智毅.全自动运行列车值守模式研究[J].现代城市轨道交通, 2022(S2): 64-67.
猜你喜欢
城市轨道交通研究(2024年1期)2024-02-23 07:28:36
快乐语文(2021年15期)2021-06-15 10:19:38
文萃报·周二版(2021年51期)2021-01-02 19:52:36
童话世界(2020年13期)2020-06-15 11:54:32
现代城市轨道交通(2020年1期)2020-02-14 15:35:49
铁道通信信号(2020年11期)2020-02-07 01:02:34
杂文月刊(2019年19期)2019-12-04 07:48:34
故事大王(2019年4期)2019-05-14 16:38:48
城市轨道交通(2019年2期)2019-04-04 08:55:54
小天使·一年级语数英综合(2019年11期)2019-01-13 01:31:29