单洞双线中隔墙马蹄形隧道成型质量分析
2024-02-05 22:35牛延平
科技创新与应用 2024年5期
牛延平

摘 要:单洞双线区间单管隧道由于防灾送风排烟通道,中间隔离墙和疏散通道施工时存在诸多偏差(因现场定位、浇筑胀模等)、隧道雾气严重(控制点间距较远,无法定向),内部结构表面潮湿(激光无法反射)等诸多因素影响,采用常规全站仪单点测量无法实现断面数据采集,基于三维激光扫描技术的大直径盾构法单洞双线、有中隔墙马蹄形隧道断面处理技术,采用三维激光扫描仪获取二衬结构海量点云数据,借助cyclone、HDS、CAD多种处理手段相融合,分析隧道内断面变形、隧道收敛、施工偏差等情况。
关键词:三维激光;海量点云;多手段融合;单洞双线;中隔墙
中图分类号:U455.43 文献标志码:A 文章编号:2095-2945(2024)05-0160-04
Abstract: Due to the disaster prevention air supply and smoke exhaust passage, there are many deviations in the construction of the middle separation wall and evacuation passage (due to on-site positioning, pouring formwork, etc.), and there is serious fog in the tunnel (the distance between the control points is far apart, unable to orient). The surface of the internal structure is wet (laser can not be reflected) and many other factors, so the cross-section data collection can not be realized by using conventional total station single-point measurement. Based on the three-dimensional laser scanning technology, the large-diameter shield single-hole, double-line, horseshoe-shaped tunnel section processing technology, this paper proposes using three-dimensional laser scanner to obtain the massive point cloud data of the second lining structure, with the help of the integration of cyclone, HDS, CAD processing methods, so as to analyze the tunnel cross-section deformation, tunnel convergence, construction deviation and so on.
Keywords: 3D laser; massive point cloud; multi-means fusion; single hole and double line; partition wall
目前國内盾构隧道主要有单洞双线、单洞单线2种形式。其中单洞双线区间采用单管隧道作为行车隧道,将隧道分为上中下3层, 其中上层作为防灾送风排烟通道,中间设置隔离墙和疏散通道,隧道下层为排水沟。
由于防灾送风排烟通道,中间隔离墙和疏散通道施工时存在诸多偏差(因现场定位、浇筑胀模等)、隧道雾气严重(控制点间距较远,无法定向),内部结构表面潮湿(激光无法反射)等因素影响。常规全站仪极坐标法断面数据采集手段已无法完成区间断面数据采集,且耗时耗力,不能精准、高效地把握隧道成型质量。
通过三维激光扫描技术获取海量点云数据,拟合实测断面成果(图1)和与设计断面对比,可以分析隧道内断面变形、隧道收敛等情况。
1 技术特点
其一,区间防灾送风排烟通道,中间隔离墙和疏散通道施工时存在诸多偏差(因现场定位、浇筑胀模等)。本次目标物数据采集采用3.1 mm@10 m的分辨完成扫描,可反映异型隧道任意部位细部特征。
其二,因部分隧道设计线路中涉及长、短链、减震道床过渡段,以及部分管廊隧道线型的特殊性,各地方地铁断面成果资料汇交的不同要求,需借助徕卡cyclone及HDS变形分析工具与CAD三者结合,合理绘制点位分布图及净空分析位置图,确定其断面、净空分析时所规定的点位要求,实现了过渡数据的准确性衔接,提高数据可靠性,得到一套完整的三维激光扫描仪隧道断面净空测量的数据处理方法。
其三,盾构隧道数据采集过程中至少保证4个及以上标靶架设在施工控制点上,量取并记录目标高度,得到标靶的三维坐标,且提高自由设站所得点云数据与施工坐标系的统一精度,解决了盾构隧道点云拼接的精度、点云绝对坐标的精度高的要求,提高了外业三维扫描数据采集的效率。
其四,异型隧道参考特征点位置特殊,复测位置需按设计里程实地放样,该里程对应断面参考点放样困难,三维激光扫描仪的使用,不受隧道内旁折光、视距、人员专业素养和现场经验等限制,可以快速的完成外业工作。省时高效,节省项目成本,创造经济效益。
2 适用范围
区间采用单管隧道作为行车隧道,将隧道分为上中下3层, 其中上层作为防灾送风排烟通道,中间设置隔离墙和疏散通道的异型隧道(单洞双线断面、有中隔墙马蹄形隧道断面)及常规单圆形盾构法隧道或其他异型隧道。
3 技术原理
外业扫描数据精度往往在外业施测的各个环节中受不同因素的影响。如扫描目标物的物理特性、扫描视场的局限性等都会产生扫描盲区,以至于部分点云数据无法获取;如仪器设备和标靶的对点误差、测量误差等导致点云数据的微位移。目标物的三维坐标数据数据获取原理,采用激光光束,测定斜距S,水平角ψ,竖直角θ。得三维坐标(x,y,z)
多站点云数据是采用相互独立空间直角坐标系。一般以扫描仪中心作为坐标原点O,仪器初始化时固定方向为Y轴,竖直上,并且垂直于Y轴的为Z轴。由于在实际测量中,测距和测角误差不可避免,并且仪器设备和标靶的对点误差,都会导致坐标原点O发生位移,必然使得x,y,z的精度各不相同。
解算关系如下
其中
旋转矩阵
式中:ωx、ωy、ωz为坐标轴X、Y、Z的旋转角度,Δx、Δy、Δz为坐标轴X、Y、Z方向的坐标增量,点云配准误差即为数据矩阵的解算误差。采用标靶配准时,要求解上述未知数,必须两站之间共用3个及以上公共标靶(图2)。
4 技术流程图
基于三维激光扫描技术的大直径盾构法单洞双线、有中隔墙马蹄形隧道断面处理技术流程(图3)。
5 技术操作要点
5.1 异形隧道外业数据采集
区间采用单洞双线中隔墙马蹄形隧道,二衬结构将其分为左、右线,共架设XX站,采用3.1 mm@10 m的分辨完成扫描,特殊区域调整分辨率,提高效率。
5.2 扫描点云拼接去燥
利用已提供的标靶中心测量数据,可依照标靶拼接的原理进行高精度的控制坐标的转换,帮助用户控制拼接误差。通过拼接报告显示,在约束条件下每站的整体误差及在各方向上的误差均在1 cm以内。
5.3 点云抽稀处理
基于拼接好的异型隧道点云模型中对点云数据进行优化,选择在统一化过程中对点云进行等比例抽稀以减少数据冗余。平均点云间距设置时不宜过大,否则影响后续提取断面质量。
5.4 左、右线设计中心线设置
盾构区间中,曲线段因线路中心线与隧道中心线不重合,底板和顶板高程均为实际盾构内壁最低点和最高点高程,并非线路中心线处上下内壁高程。左右横距以线路中心线为基准向盾构左右内壁测量距离。所有横断面的测量基准均以线路中心线为测量基准。
5.5 左、右线设计断面设置
设计断面即为隧道标准断面,在进行隧道对比或净空计算时应将获取的断面与标准断面对比。根据断面要求,采用CAD设计建立异型隧道横断面坐标系(图4)。
5.6 点云数据格式转换传输
将完成拼接、去燥、抽稀的点云数据输出为.PTS或 .XYZ格式,作为后处理软件的基础数据。
5.7 基于设计中线切割横断面
一般地铁隧道断面测量要求断面测量间距,沿里程增加方向,直线段每隔6 m、曲线段每隔5 m测量一个断面。起始里程与结束里程指的是中心线长度而非实际里程。
5.7.1 横断面密度
①测量基本密度。直线地段每隔6 m、曲线地段每隔5 m测量一处横断面。不论何种类型的断面结构,除上述基本密度外,还应在如下位置加测横断面:线路起点、线路终点、曲线五大要素控制点(ZH、HY、QZ、YH、HZ、或ZY、QZ、YZ);②特殊点横断面。结构横断面变化点(测同一位置的2种横断面);人防隔断门门框两侧、区间联络通道两边缘、道岔中心位置、区间射流风机处、站台、区间、配线地段线路两侧的立柱;横断面的里程误差应在±50 mm以内。
5.7.2 横断面测点分布
断面上测点位置均应为限界控制点。①测点位置的定位要求。为应对施工误差较大时对左、右测点影响,本次调线调坡测量中左右测点的定位(测点高度)均以该断面的设计标高为基准推算而确定;②测点位置的允许偏差。为控制限界及方便施测,实际左、右测点位置与设计位置可有±50 mm的偏差。
5.8 特征点提取及断面对比、净空分析
5.8.1 横断面对比
将提取的横断面与设计断面进行进行对比,分别选择需要对比分析的2个横断面,并根据需要设置参数扇形点数和中心偏移,选择取点方法,设置完毕后,即可开始进行横断面对比。分析结果的隧道断面图视图,查看超欠挖具体数值。
5.8.2 凈空分析
以施工图的设计线路中心线为测量基准线,测点距基准线的横距是指轨顶设计高程以上规定高度位置由基准线至隧道内壁的距离(横偏距);顶部测点是设计线路中心线在隧道顶部内壁的投影点,底部测点是设计线路中心线在隧道底部内壁的投影点,均以高程表示(或高差:纵偏距)。隧道净空测量如图5所示。
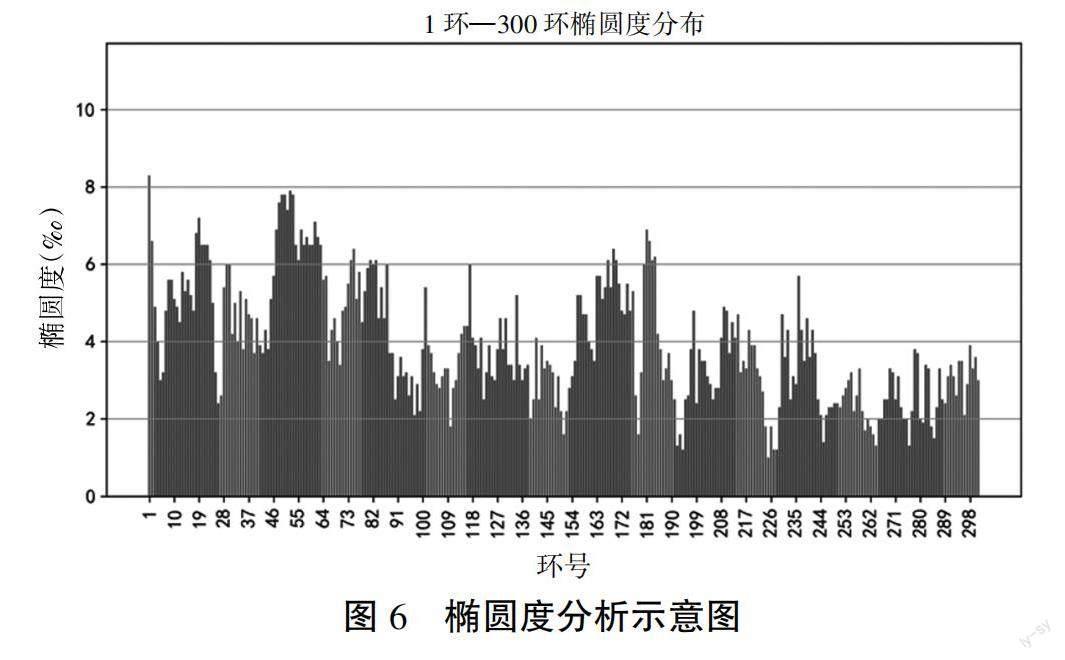
5.8.3 圆形隧道椭圆度分析与成果展示
拟合椭圆采用剔除粗差后点云并通过空间分布定权方法,保证拟合椭圆尽量与隧道实际内轮廓贴合,避免因道床遮挡、下部点云过于密集原因会造成短轴拟合值过小,因腰部位置线缆、管片错台等会造成长轴大于实际隧道内轮廓。
椭圆度计算公式为scale=(ra-rb)/d,其中scale为椭圆度,ra为长轴,rb短轴,d为设计圆内径。
椭圆度分析如图6所示。右线椭圆度分布概况见表1。
区间三维激光扫描成果具有可靠性,其测量方式可代替传统的测量方法,数据采集快捷方便,内业数据处理自动化,成果可靠。
参考文献:
[1] 齐建伟,纪勇.地面3D激光扫描仪反射标靶中心求取方法研究[J].测绘信息与工程,2011(2):37-39.
[2] 鲁铁定,周世健,张立亭,等.基于整体最小二乘的地面激光扫描标靶球定位方法[J].大地测量与地球动力学,2009,29(4):102-105.
[3] 王晓峰.三维激光扫描技术在土木工程领域的应用[D].上海:同济大学,2009.
[4] 朱磊,王健,毕京学.三维激光扫描技术在变形监测中的应用[J].北京测绘,2014(5):78-82.
[5] 叶晓婷.三维激光扫描技术在古建筑测绘中的应用分析[J].城市测绘,2014(4):8-11.
[6] 苏晓蓓,郝刚.地面三维激光扫描标靶中心识别算法研究[J].城市勘测,2010(3):68-70,76.
[7] 代世威,孙洋洋.浅谈地面三维激光扫描仪误差[J].城市建设理论研究(电子版),2013(11):1-3.
[8] 冒爱泉,朱益虎,郝思宝,等.地面三维激光扫描仪精度测评方法和误差改正模型研究[J].测绘通报,2014(2):72-75.
[9] 激光扫描欧洲.激光扫描仪参考球体套装(标准)FARO激光扫描仪和Trimble TX5[EB/OL].(2013-8-3).http://shop.laserscanning-europe.com/Laser-Scanner-ReferenceSphere-Set-Standard-for-FARO-Laser-Scanner-and-Trimble-TX5.
[10] 罗德安,朱光,陆立,等.基于3维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.
[11] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[12] 吴杭彬,刘春.三维激光扫描点云数据的空间压缩[J].遥感信息,2006(2):22-24,28.