面向月表多设施通信网络的通信塔部署方案
2024-01-30 14:52:36顾术实张智凯张钦宇
系统工程与电子技术 2024年2期
覃 凯, 顾术实,2,*, 张智凯, 王 玉, 刘 倩, 赵 晨, 张钦宇,2
(1. 哈尔滨工业大学(深圳)电子与信息工程学院, 广东 深圳 518055; 2. 广东省空天通信与网络技术重点实验室, 广东 深圳 518055; 3. 上海宇航系统工程研究所, 上海 201109)
0 引 言
月球探测作为深空探测的起点,是人类探索宇宙未知环境、研究太阳系起源与演化、开发利用空间资源、拓展生存空间的主要手段[1]。随着世界各国对开发利用月球资源乃至建设永久人类活动基地等规划的不断深入开展,未来月球探测包含的更多的无人或有人月面巡视设备将参与到各项科学研究、勘测及试验任务中[2]。
近年来,随着人工智能技术的快速发展,月球探测器的自主能力逐步增强,认知经验和探测水平稳步提升,月表探测活动向着分布式、并行化、分工协同的模式展开[3]。随着轨道器、着陆器、巡视器等月球探测设备的增多,多设备之间自主化、智能化的协同工作,使得需要的传输数据量增加。过度依赖距离极远的地月链路对月表设备进行遥测、遥控、数传,难以满足高精度、近实时的通信需求[4]。利用着陆器、探测器、巡视器等探测设备组成月表多设施灵活互联的局部通信网络,将探测数据进行处理、分析后,再将结果传回地面,以支持月球科考中探测器测控、原位资源开采和智能机器人自主作业等复杂探测任务。
目前对月面通信系统建设的研究包括3个方面,一是关注月表环境、地形变化对电波传播和通信链路的影响,二是着重设计无线传感器网络架构和节点部署方案,三是加深研究适用于月面的通信网络制式和组织架构。在通信链路预测方面,文献[5]和文献[6]研究了月面地形对无线通信信道的影响,指出月表地形、信号频率、天线位置和月表土壤材质是决定传播特性的重要因素,无线信号在月表的陨石坑附近会出现巨大衰减。文献[7]研究了月表的电波绕射损耗的衰减模型,提出将月表电波传播分为光滑月球表面、粗糙月球表面、刀刃形障碍物地形和圆柱形障碍物地形等,并提出了绕射损耗的计算方法。在无线传感器网络对月球探测作用的研究中,文献[8]针对月表高真空、强辐射特点设计了月面分布式组网及激光回传网络架构,扩大了月球表面的探测面积。文献[9]考虑无线传感器的能源消耗和损坏问题,对无线传感器网络的覆盖性、生存能力和整体质量进行了分析;在组网架构和通信制式方面,文献[10]分析了中心式月面组网的模式,通过模拟月球巡视器的运行情况验证了巡视器和着陆器网络的可连通性。文献[11]通过对802.11e的扩展,可动态调整竞争参数,以满足月面通信的性能要求,将扩展后的地面网络标准用于月面通信。目前,美国宇航局正式公布了美国Artemis月球探测计划,将在2025年至2030年间建立环月轨道空间站和月球表面基地,以实现月面持续驻留,并计划将4G基站部署至月球表面。中国的探月工程致力于对月球的勘测、建造和开发,稳步推进“探月”、“登月”和“驻月”三步走战略,着力开展建造月球基地,实现宇航员短期驻留及永久月球基地的研究[12]。
在地面网络基站部署中同样需要考虑不同设备之间的资源配置、功率控制、系统能耗问题,以及不同地形下信号传输的损耗情况。文献[13]考虑利用一个发送端为多个接收端提供无线覆盖的场景,忽略小尺度衰落影响,以最大化接收端的传输速率为目标,证实了基站位置的优化问题为非确定多项式(non-deterministic polynomial, NP)难问题,并给出了数值仿真方法。文献[14]关注采用中继基站方式实现中心基站对移动接收端的覆盖,通过区域划分、确定明亮区域、确定候选区域和确定中继位置4个步骤实现中继基站部署。文献[15]在毫米波基站部署中提出了多层毫米波蜂窝结构,采用分布式架构,最大化网络的通信速率和覆盖率。
分析目前地面通信基站的部署方案,其设计思路可大致分为3类。一是使用穷举法搜索,通过将通信基站的所有选址带入通信模型进行仿真,找到满足通信需求的最优解;二是采用启发式算法,如遗传算法(genetic algorithm, GA)、计算几何算法和粒子群算法等,减小算法的时间复杂度和空间复杂度,采用较小的代价得到基站寻址的局部最优解;三是学习算法,通过历史信息学习特定的基站部署规则,对覆盖性和通信速率进行预测,决定最优的部署位置。然而,地月距离遥远,着陆器、巡视器与月面科研站之间大量的数据通信业务仅依赖于月面通信基站完成,使得通信基站必须具备良好、稳定、可持续工作的多种功能模块支持。此外,月表环境复杂,设备与设备之间的通信状况需要根据不同的链路环境进行分析,充分考虑电波在月球表面传播时不同方向、不同范围的传播特性。通信链路预算复杂度增加,基站的覆盖方式和覆盖效果难以通过测算得知,需结合多种通信指标进行评估。
综合上述分析,本文充分考虑月球科研探测过程中对通信系统的需求和对通信基站部署位置的约束,设计出适配月面多设施通信网络的月面通信塔模型,采用GA并结合实测的月球南极地形数据,设计出在月球通信塔(lunar communication tower, LCT)[16]的部署方案,进一步结合CCSDS Proximity-1协议、LTE和Wi-Fi等通信制式下场强覆盖性与传输速率的对应关系,以满足月球科研考察任务中的各种通信需求,为未来月球科研站的部署规划提供指导和建议。
1 通信塔的设计需求与方案
LCT作为月球科研基地必不可少的通信基础设施,主要负责实现与月表巡视器、智能机器人和宇航员的数据传输功能。传输数据包括遥控指令、遥测参数、高清图像和大量科学载荷数据,以此支持月球科研站的自主月球探测任务。一方面,LCT将来自月球的数据多路转换为宽带信号,发送到月球中继卫星或直接传输到地球;另一方面,LCT将作为基站连接多个月表探测设备,从而形成月面局部通信网络,有利于开展复杂探测任务。根据美国NASA对未来月球科研基地通信能力的调查研究[16],拟定月球科研站的通信需求如表1所示。由表1可以发现,为实施复杂月球探测任务和大容量通信业务,在LCT的覆盖范围和传输速率方面都需要极大的通信能力支撑。

表1 LCT对不同任务类型的要求
为满足我国月球科研站初步建设的实际通信需求,LCT应该包含存储设备、收发天线、时间基准设备以及无线电收发设备,其基本功能模块如图1所示[17]。其中,Ka和S频段收发装置负责LCT与中继卫星之间的通信任务,甚高频(ultra high frequency,UHF)频段用于LCT对月面通信终端的相互通信,而月面数据由LCT内的路由器与卫星数据进行交互,固定式的LCT可由光纤连接月面科研站,并将数据暂时存入数据存储模块中。

图1 LCT功能模块示意图Fig.1 Schematic diagram of fundamental modules of LCT
根据各模块功能,LCT包括一个包含通信和航空电子设备的托盘,一个指向深空与中继卫星的Ka/S频段碟形天线,以及一个附加的、可展开的10 m吊杆,安装360°高增益全向覆盖的三抛物面天线。抛物面天线由抛物面反射器和辐射器组成,辐射器装载于抛物面反射器的焦点或焦轴上,辐射器发出的电磁波经过抛物面的反射,使得电磁波向一个特定的方向汇聚形成强方向性波束,提高了特定方向上的发射增益,增益计算可由下式确定:
(1)
式中:A是抛物面天线的面积;λ为信号波长;η为天线效率。
三抛物面天线安装在天线转台上,如图2所示。天线展开机构由垂直转动单元、水平转动单元、支撑结构等部分组成[18]。垂直转动单元提供垂直面方向的俯仰角转动,水平转动单元提供水平方向的转动,两个转动单元之间通过连接件连接在一起,形成相互垂直的转动机构。

图2 天线展开转台模型Fig.2 Model of antenna deployment turntable
因此,根据天线高度和口径的设计需求,给出LCT的整体设计模型,如图3所示。
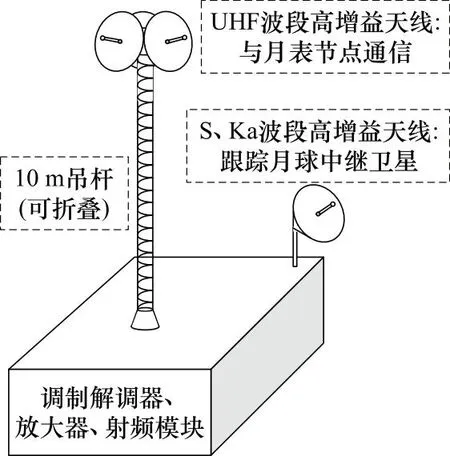
图3 LCT模型Fig.3 Model of LCT
2 基于地理信息的通信塔场强预测
2.1 ITU-RP.526模型
ITU-RP.526模型[19]是国际电联提出的描述电磁波绕射过程中影响场强的预测方法模型,该模型全面综合各种绕射理论,给出了通信视距的判定方法、不同类型障碍物的计算方法,主要用于视距外电波传播的传输损耗计算场景。ITU-RP.526模型同样被用于月表无线电传播的链路预算的研究[20-21],通过结合不规则的月表地形集合结构和不同的传播场景,计算出点对点通信的路径损耗。ITU-RP.526模型将传输路径上的障碍物绕射场景进行了分类,根据路径上有无障碍物分为光滑球面场景和障碍物绕射场景;根据障碍物形状不同,分为球形障碍物绕射和刀刃形障碍物绕射;根据障碍物数目不同,分为单障碍物绕射和多障碍物绕射。然而,ITU-RP.526模型并未涉及障碍物类型及障碍物数量的计算方法,需要根据月表地形进行进一步判断。
2.1.1 障碍物类型的判断
ITU-RP.526模型将孤立的障碍物划分为刀刃型和圆柱形两种类型,两种类型的区分与障碍物宽度密切相关,障碍物判断方式如图4所示。
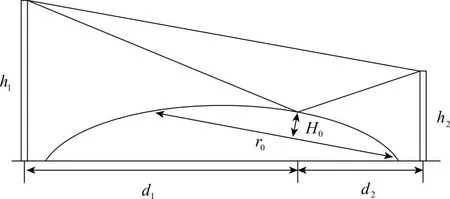
图4 障碍物判断的参数含义示意图Fig.4 Schematic diagram of the meaning of parameters for obstacle judgement
其中,h1、h2分表表示收发天线的高度,d1、d2表示障碍物顶部与路径两端之间的距离,r0表示障碍物顶点以下距离为H0=0.577×R1处障碍物的宽度,R1表示第一菲涅尔区半径。障碍物类型由地形参数u来确定,当u<3时,障碍物为圆柱形障碍物;当u≥3时,障碍物为刀刃型障碍物。地形参数的计算方法如下:
(2)
2.1.2 障碍物数量计算
ITU-RP.526模型中孤立障碍物的存在取决于其本身与周围地形之间有无相互影响,即路径衰减是否仅由障碍物导致。因此,孤立障碍物需满足以下条件:
(1) 发射机与障碍物不存在相交的半阴影区;
(2) 障碍物的宽度在第一菲涅尔半径区,即0.6R1。
根据以上条件,寻找障碍物数量以及位置的方法详见算法1,障碍物搜索过程中障碍物位置的示意图如图5所示。
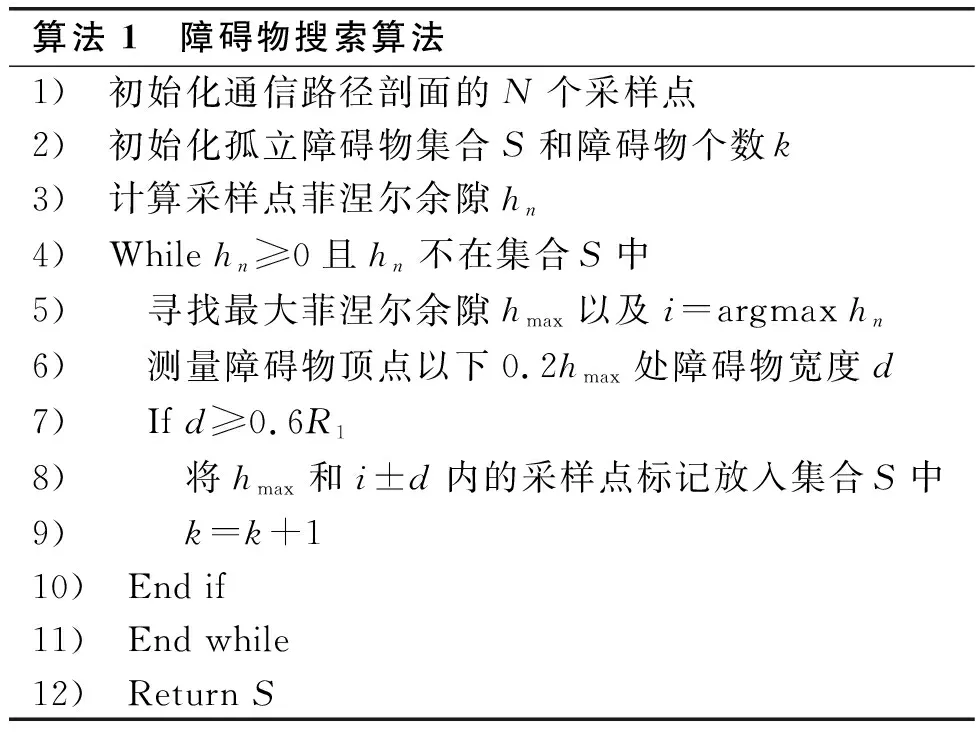
算法 1 障碍物搜索算法1) 初始化通信路径剖面的N个采样点2) 初始化孤立障碍物集合S和障碍物个数k3) 计算采样点菲涅尔余隙hn4) While hn≥0且hn不在集合S中5) 寻找最大菲涅尔余隙hmax以及i=argmax hn6) 测量障碍物顶点以下0.2hmax处障碍物宽度d7) If d≥0.6R18) 将hmax和i±d内的采样点标记放入集合S中9) k=k+110) End if11) End while12) Return S
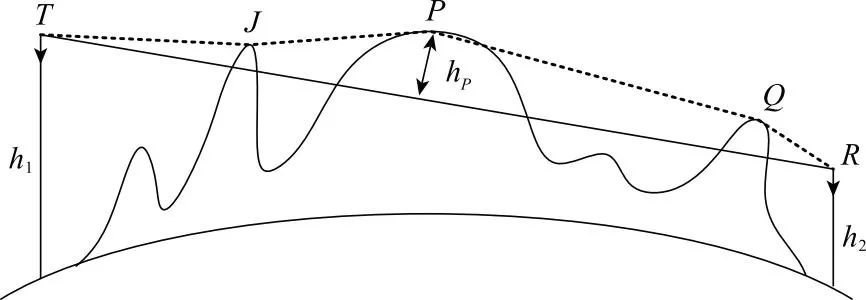
图5 障碍物搜索示意图Fig.5 Schematic diagram of obstacle search
图5中收发天线的高度分别为h1、h2,障碍物到收发天线连线T-R的距离称为菲涅尔余隙hc,连线T-R以上的部分hc大于0,以下的部分hc小于0。在使用障碍物搜索算法的过程中,首先发现主峰P,计算器障碍物宽度dP,满足宽度条件,则将P记入孤立障碍物集合S,若不满足条件,则继续寻找下一主峰;依次寻找到孤立障碍物Q、J后,得到记录了所有孤立障碍物高度和位置的集合S。将集合S中的障碍物顶点位置带入ITU-RP.526模型中,可以计算出多个障碍物的联合绕射损耗。
2.2 基于电磁波绕射传播的场强预测
电磁波在月球表面的传输损耗主要包括自由空间损耗、散射损耗、反射损耗、绕射损耗和馈线损耗等[22]。在远距离、大尺度的月表电波传输损耗中,主要考虑电波绕射损耗对场强的影响。参考COST-231的损耗计算模型,自由空间损耗为
Lbf=42.6+26lgf+20lgd
(3)
式中:f为信号频率,单位为MHz。d为传输距离,单位为km。在ITU-RP.526模型中,天线相对地面的高度会对绕射损耗产生影响,其带来的增益项G(X)的计算方法如下:
(4)
式中:K为月球表面导纳相关参数,B为天线极化模式的相关参数,计算公式为
(5)
B=βX
(6)
(7)
式中:β表示极化参数,取决于天线极化的方式;f表示信号频率,单位为MHz;ae表示月球半径,单位为km;h表示天线高度,单位为m。忽略反射损耗、散射损耗和其他微小损耗的影响,电磁波在月球表面绕射过程中的总损耗L的计算表达式如下所示:
L=Lbf+Lv-G(X)
(8)
式中:Lbf为自由空间衰减;Lv为绕射损耗衰减;G(X)为天线高度增益项。考虑信号的发射功率、收/发天线增益,LCT有效覆盖区域内任意一点的场强P的计算表达式如下:
P=Pt+Gt+Gr-L-Ld
(9)
式中:Pt表示信号发射功率;Gt表示发射天线增益;Gr表示接收天线增益;Ld表示收/发天线馈线损耗。
2.3 信号强度预测与地理信息模型的结合
月球表面的地理信息由数字高程模型(digital elevation model, DEM)给出。DEM模型是采用坐标(x,y,z)表示地表空间属性的三维向量有限序列。其中,(x,y)表示位置信息,z表示该位置的高程信息,以离散点描述连续的地形地貌。本文采用的月球南极“艾肯”盆地区域的DEM,如图6所示,地形高度从-2 847 m至1 989 m不等,高度落差巨大且月面凹凸不平,四周存在数个大型陨石坑,极大地影响了月面通信终端之间的视线。

图6 月球南极区域2D和3D DEM地形图Fig.6 Terrain diagram DEM of lunar south pole region in 2D and 3D
DEM数据进行场强预测时,采用双线性插值方法来根据一系列点构建出表示地形的平滑连续函数,将区域内的所有点拟合成统一的高程曲面。选取某一位置坐标作为信号发射的起始位置,对周围提取的高程数据坐标进行场强计算。完成所有高程数据坐标的场强预测后,得到结合地理信息模型的场强区域覆盖图。因此,基于月表地理信息的场强预测总流程如图7所示。

图7 月表电波场强预测流程Fig.7 Workflow of lunar surface radio wave’s field strength predication
3 通信塔位置部署策略
3.1 通信塔主基站(main station, MS)部署需求
月球探测依赖的主要能源仍然是太阳能,而月球南极区域存在永久光照区,但辐照度不高,永久阴影区内无法建站,使得月面科研站的选址位置在南极附近[23]。
图8是通过遥感实测得到的月球南极30×30 km2区域范围内的光照时长图,蓝色区域为永久阴影区,红色区域为永久光照区。根据LCT需求分析,需实现半径为10 km的通信覆盖。采用MS与副基站(sub station, SS)协同的方式进行基站部署。其中,MS因能源条件需要部署在光照区内,且以较大的场强覆盖大片区域,对MS在区域内的平均场强进行计算:
(10)
式中:(x,y)表示MS的位置坐标;集合C表示以(x,y)为中心、半径为10 km范围内的坐标点集合,Pi(x,y)为i点坐标位置的预测场强大小;N为C中坐标点的个数。计算永久光照区内平均场强最大的坐标,就可确定MS的部署位置。

图8 月表光照时长图Fig.8 Lunar surface light duration
3.2 通信塔SS部署需求
MS位置确定后,SS取址的目的是提高10 km范围内的场强覆盖面积。月面多设施通信网络需要保持网络功能的独立性,减少对中继卫星的依赖,这里假设SS可实现双向中继通信[24]以满足月面通信终端与MS的互联需求,如图9所示。

图9 SS中继通信模型Fig.9 Relay communication model of SS
由于在MS 10 km半径区域的任意位置均可部署LCT,该问题变成了一个NP难问题,无法直接求解,可采用启发式GA[25]获得最优部署位置。
3.2.1 GA编码与解码规则
GA的编码过程是将待求解问题的可行解从解空间中映射到算法的搜索空间[26],因此编码与解码的规则是算法实现的根本问题。在LCT SS部署中,问题的解为SS的坐标位置(x,y),为满足SS中继通信需求,解空间中的坐标位置必须位于MS或其他SS的覆盖区域。因此,可将位置信息(x,y)采用二进制编码形成个体中的n位染色体,即

(11)
式中:ai,i∈{1,2,…,n}表示x坐标的n位码字,bi,i∈{1,2,…,n}表示y坐标的n位码字,共同表示一个基站的位置信息。通过调整编码的长度n的大小,可以修改搜索区域的大小,以在不同的区域内进行搜索。
3.2.2 适应度函数计算
GA的优化目标是适应度函数,为实现对网格区域的覆盖,通过链路预算将坐标(x,y)下所对应的信号覆盖面积作为适应度函数。根据不同通信制式下信号接收功率的最低要求,将达到接收机灵敏度Sre以上的区域判定为覆盖区域,将适应度函数定义为SS部署在(x,y)处时,10 km半径二维区域内预测场强大于Sre的坐标点的数目,计算方式如下所示:
(12)
式中:集合Z表示二维地图上坐标位置的可行集,即MS半径10 km范围内的坐标点。S(xi,yi,x,y)表示当SS部署坐标为(x,y)时,坐标(xi,yi)覆盖效果的参量:当预测点(xi,yi)处的信号强度大于Sre时,S(xi,yi,x,y)的取值为1;反之,Si(xi,yi,x,y)的取值为0。
3.2.3 选择算子
选择算子采用的是轮盘赌转(roulette wheel selection, RWS)法。根据基站坐标所对应的适应度大小计算出各个坐标位置的累计概率,计算方法如下所示:
(13)
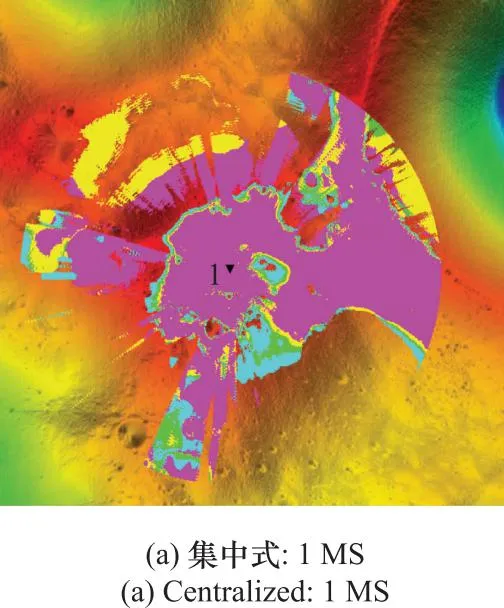
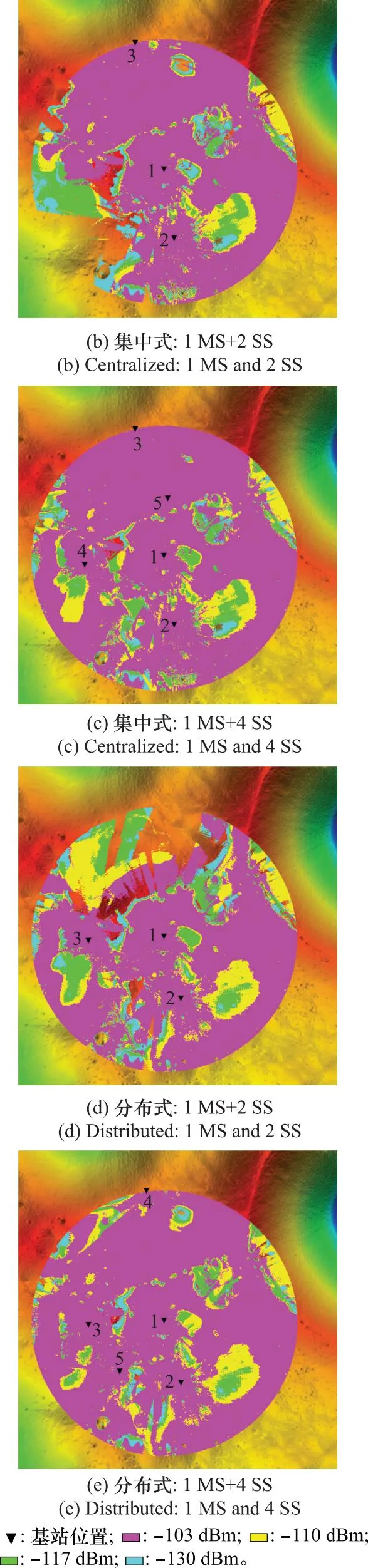
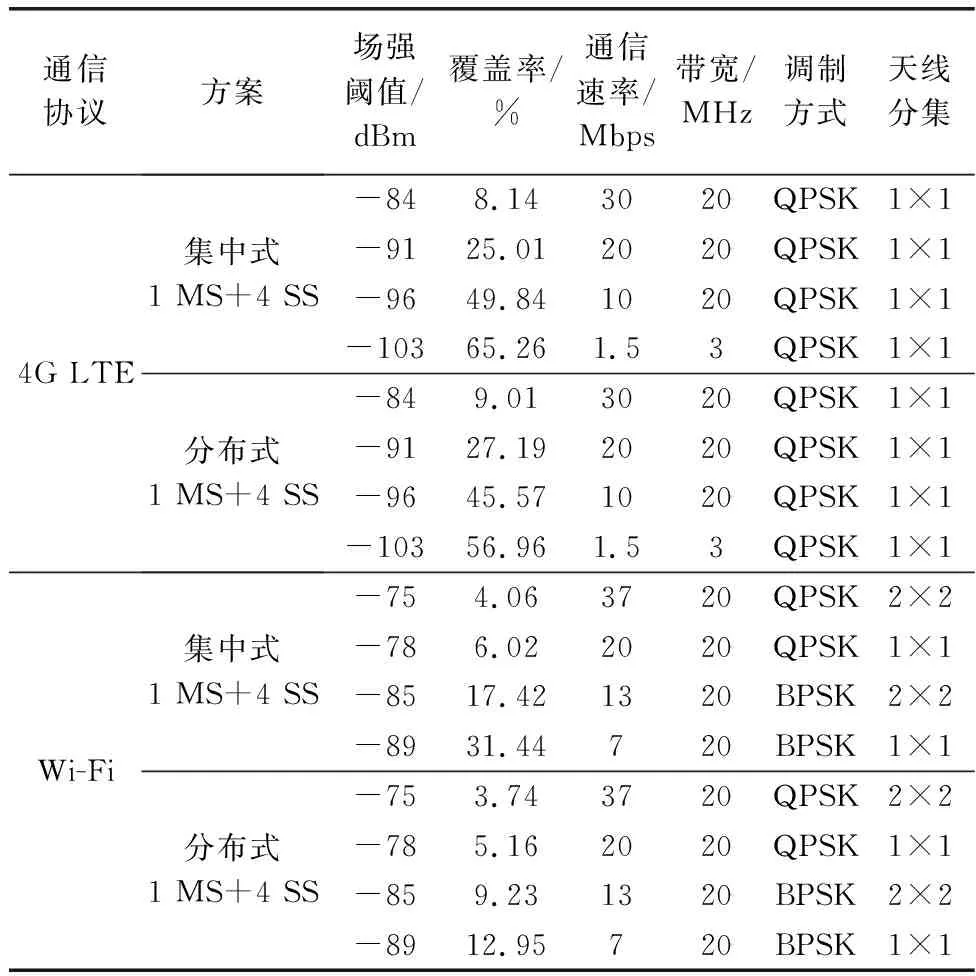
式中:i∈{1,2,…,N}。N为种群中坐标位置的总数量。F(xi,yi)代表第i个坐标(xi,yi)所对应的适应度函数。产生一个随机数r∈(0,1)来选择需要保留的坐标位置,若满足Qi-1≤r 3.2.4 交叉算子 GA交叉算子采用部分映射法来产生子代的坐标位置。具体做法为,随机确定待交换的两个表示坐标位置的编码中的两个位置,将两个码字进行调换得到新的编码,如图10所示。 图10 染色体交叉过程Fig.10 Process of chromosome crossing 种群中的坐标位置以交叉概率Pc进行交叉操作,Pc的大小基于染色体的适应度值在一定范围内自适应变化,由下式确定: (14) 式中:Pc1和Pc2分别代表交叉概率的上界和下界。Favg和Fmax分别代表所有坐标位置所对应的适应度的平均值和最大值。式(13)表示对于种群中适应度较小的坐标位置以较大的概率进行交叉操作,从而增加搜索效率,并加快寻优进度。 3.2.5 变异算子 GA根据变异概率Pm确定坐标位置编码是否发生过变异,对于发生变异的坐标编码,随机选取一个码字,然后生成该基因取值范围内的随机数进行替代,如图11所示。 图11 染色体变异过程Fig.11 Process of chromosome variation 综上所述,基于GA的通信塔部署算法的基本流程如图12所示。 本文采用的LCT布站策略与地面基站的部署算法相比,存在以下优势:首先,穷举法虽然能够得到最佳部署位置的精确解,但其相对较大的计算量不适用于广袤的月球表面位置搜索;而粒子群算法与GA同为启发式算法,在收敛速度上快于GA,但更适用于处理连续变量的问题求解[27],而GA则在对月面位置搜索等离散变量问题上能得到更接近最优值的结果;最后,机器学习算法需要先验知识和数据集支持,而月表通信链路难以进行实地测量,缺少月球通信的原始数据,无法完成建模。综上所述,为实现月球多通信设施的初级互联需求,本文考虑采用GA进行LCT部署的设计与仿真验证,具有较好的工程实现价值,并能给出相对合理可行的布站位置。 图12 GA流程图Fig.12 Flowchart of GA 考虑在图6所示的月球南极区域进行场强预测及基站覆盖效果仿真。该区域靠近陨石深坑,符合月面科考条件;若光照条件充足,可进行月面科研站的建设,月球环境参数如表2所示。 表2 月表环境参数 目前,月球探测器终端通信主要集中在UHF频段和S频段[28],两种频率电磁波受地形的影响互不相同。其中S频段频率更高,波长更短,电磁波在传播过程中受地形的影响更加明显;UHF频段频率高低造成的损耗特性则与S频段相反。S频段和UHF频段两个频段的通信特点对比如表3所示。 表3 S频段与UHF频段通信特点比较 由两种频段的特点可知,不同频段的覆盖范围和通信速率使得LCT的部署方案存在差异。如前所述,采用LCT MS、SS协同部署的形式,先确定MS的部署位置,再根据GA对两种频段方案下的LCT做链路预算,对比不同的SS位置的适应度,依次寻找最佳的SS部署位置。MS和SS在执行任务、覆盖需求和部署开销等方面存在差异,在仿真过程中采用不同的参数,如表4所示。 表4 MS与SS仿真参数 MS的部署位置以最大化式(10)平均场强Pavg为目标,其中设定坐标点个数为N=1 000。根据第4.1节的参数设置,在MS 10 km半径范围内进行场强预测,如图13(a)中有色区域所示。SS的部署以最大化最低速通信所需的场强覆盖面积为优化目标,确定方法采用GA循环迭代,得到一个SS的最佳部署位置后再用GA求解下一个SS的部署位置。取MS和SS中场强预测的最大值作为覆盖区域内的场强大小。 图13 UHF频段Proximity-1协议的集中式与分布式LCT 部署的场强覆盖性能对比Fig.13 Coverage comparison for field strength coverage performance between centralized and distributed LCT deployments of Proximity-1 in UHF band 场强仿真对比了集中式与分布式两种部署方式。集中式部署来源于地面蜂窝网络基站,通信终端在各基站覆盖区域内仅与中心基站进行数据交换;分布式部署采用中继互联方式,各个通信塔基站可直接或间接通信,使得覆盖区域内的设备都可进行数据交换。 图13为UHF频段下不同覆盖方案的覆盖效果图,展示了1 MS、1 MS加2 SS、1 MS加4 SS在集中式和分布式部署方式下的覆盖效果,根据链路预测的结果采用不同颜色代表达到不同场强阈值的各个区域。UHF频段的场强阈值(-130~-103 dBm)基于CCSDS Proximity-1协议制式[29],经理论仿真可知,具体参数设置(带宽、调制方式、天线分集)以及不同场强阈值的覆盖率、通信速率(1 Mbps、512 kbps、256 kbps、64 kbps多个档位)的对应关系如表5所示。 表5 UHF频段Proximity-1协议部署方案覆盖效果对比 图14为S频段LTE通信制式和Wi-Fi通信制式,在1 MS+4 SS下分布式部署和集中式部署的覆盖效果图。两种通信制式采用更高的频段,能够支持更高速率的通信业务,对未来月球基地的建设与大容量业务支持具有重要意义。其中,LTE制式下的场强阈值(-103~-84 dBm)由协议标准[30]仿真得到,覆盖效果如图14(a)和图14(b)所示;Wi-Fi的规范对标准物理层协议进行改进,接收信号强度(-89~-75 dBm)可根据协议标准[31-32]仿真获得,覆盖效果如图14(c)和图14(d)所示。在S频段下,不同场强阈值的覆盖率、通信速率(LTE为1.5~30 Mbps、Wi-Fi为7~37 Mbps多个档位)以及相关参数的对应关系如表6所示。 图14 S频段LTE与Wi-Fi制式下集中式与分布式 LCT部署的场强覆盖性能对比Fig.14 Coverage comparison of field strength coverage performance between centralized and distributed LCT deployments of LTE and Wi-Fi in S band 表6 S频段LTE与Wi-Fi协议部署方案覆盖效果对比 从表5中统计的数据可知,采用较少的基站进行部署时,集中式部署的覆盖效果略优于分布式部署;采用较多的基站进行部署时,集中式部署的覆盖效果与分布式部署几乎相同。1 MS+4 SS的集中式部署能以最低64 kbps的速率实现约99.01%的区域覆盖,以最高1 Mbps的速率实现约77.79%的区域覆盖;分布式部署能以最低64 kbps的速率实现约99.09%的区域覆盖,以最高1 Mbps的速率实现约78.47%的区域覆盖。这说明多基站使用能显著增加信号强度,提高月表通信覆盖率,且集中式方案在UHF频段上能获得更大的月表覆盖区域。 表6中对比了LTE制式与Wi-Fi制式下的覆盖效果。相较而言,LTE能够支持的低速率(1.5 Mbps)通信的场强大小为-103 dBm,比Wi-Fi制式下7 Mbps通信速率的场强阈值-89 dBm更低。因此,LTE在1 MS+4 SS的部署方式下覆盖率最高可达约65.26%,远高于Wi-Fi制式下的最高覆盖率31.44%;集中式与分布式部署的对比结果与UHF频段相似,集中式部署比分布式部署的覆盖率更高,但集中式基站间需要光缆支持连接,在月面的实现具有较大难度;而分布式部署利用无线通信互联多个基站,其可操作性更加符合月球探测任务的场景限制。LTE和Wi-Fi所采用的2.4 GHz的S频段频率更高,在远距离上自由空间衰减和绕射损耗更大,覆盖率要远小于UHF频段,仅适合1~2 km半径区域内的高速通信业务支持。 本文设计一种面向月表多设施通信网络的基站部署方案,给出了LCT的基本模型和功能模块组成。通过对通信链路上障碍物类型的判断,并结合ITU-RP.526模型的损耗计算方法,得到了LCT的场强预测模型,采用GA最大信号场强的覆盖面积,获得MS、SS部署位置的最优解。仿真结果表明,在月球南极10 km半径覆盖范围内,在UHF频段下采用CCSDS Proximity-1协议的部署方案可以实现约99%的区域面积覆盖,通信距离较远,能够满足基本的低速通信需求;基于S频段的LTE和Wi-Fi通信制式,LCT部署方案仅可覆盖月球科研站附近1~2 km的服务范围,但所能支持的通信速率更高,可为月球科研站未来发展的高速率、大容量通信业务提供有力保障。


4 仿真校验
4.1 仿真参数设定



4.2 场强预测仿真


5 结 论
猜你喜欢
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21 02:10:26
地震研究(2021年1期)2021-04-13 01:04:56
河北理科教学研究(2020年1期)2020-07-24 08:14:30
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
铁道通信信号(2019年6期)2019-10-08 09:02:40
铁道通信信号(2018年3期)2018-04-19 02:32:49
CHIP新电脑(2016年3期)2016-03-10 14:07:52
中国新通信(2015年1期)2015-05-30 10:30:46
城市道桥与防洪(2014年5期)2014-02-27 07:26:44