无人机倾斜摄影技术在大比例尺地形图测绘中的应用研究
2024-01-23 04:00成云瑞
科技创新与应用 2024年3期
成云瑞
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
地形图作为航摄4D 产品之一,在实际生产生活中有着广泛的用途。早期大比例尺地形图测绘,主要是利用全站仪、GPS-RTK 等进行采集,这种方式作业效率低,作业成本高,周期长,而且长期外业工作,存在较高的风险性,因此已经无法满足当今社会的发展需求。近年来,随着遥感技术和低空航空摄影测量的迅速发展,采用低空无人机搭载垂直相机获取地面影像,然后通过对影像解算,得到每张影像的外方位元素,并结合相机的内方位元素,将影像创建为立体像对,并基于立体像对采集地形图成为了一种地形图生产的重要作业方式[1]。但是立体测图,本身对硬件配置要求高,要求必须采用专业的立体显卡、立体眼镜和立体发射器,而且对作业人员水平要求高,因此这种方式存在了一段时间后,也逐渐被淘汰了。随着倾斜摄影测量技术的出现,采用裸眼的方式采集地形图成为了一种主要的作业方式[2]。目前,主流的地形图采集数据类型可以分为3 种:点云数据、DOM+DSM、实景三维模型。其中点云数据是指机载LIDAR 或者地面LIDAR 等方式获取的LIDAR 数据,将其导入专业的点云数据处理软件,进行点云数据的拼接、纠正等操作,然后基于点云采集地形图[3-4];DOM+DSM 是指利用DOM 和DSM 2 种数据成果叠加进行地形图的测绘,其中DEM 提供平面位置数据,DSM 提供高程数据;实景三维模型是指基于倾斜摄影方式得到的成果,具有三维真实的视觉,精度高,可以作为地形图采集的一种很好的作业方式。基于此,本文首先深入探讨了倾斜摄影测量技术,其次以流程图的形式对其作业流程进行了简单说明,并采用实景三维模型和虚拟立体相结合的方式,完成大比例尺地形图的采集。最后,用检测点对成果精度进行了检测统计,分析了统计结果,得出本文方案生产的地形图,可以满足1∶500 精度要求的结论,可以为大比例尺地形图的测绘带来一定的参考价值。
1 倾斜摄影测量技术
随着无人机技术的迅速发展,倾斜摄影测量技术取得了瞩目的成绩。倾斜摄影测量是指在飞行器上(通常指无人机)搭载倾斜航摄仪,从空中对地面,从多个角度获取地面影像,如图1 所示。然后采用专业的软件,对影像数据进行解算,并生产得到一系列测绘产品的技术。对于目前的无人机来说,有多旋翼和固定翼2种,对倾斜相机来说,有2 镜头、3 镜头、5 镜头甚至9镜头等。其中最常见的是5 镜头相机,其由1 个下视和4 个侧视组成,在作业时,从不同角度获取被摄物体的不同影像纹理信息。相机时,下视影像分辨率是侧视的1.414 倍,这不利于数据的准确解算。为了解决这一问题,在进行5 拼相机组装时,人为对侧视相机焦距进行调整,并且永久性对其固定,以防作业过程中相机焦距发生变化,造成航摄成果无法使用的问题发生。

图1 倾斜摄影示意图
2 作业流程
采用倾斜摄影方式生产地形图,其主要包括前期的数据航摄、像控点布设等,对于内业数据解算来说,其作业流程如图2 所示。
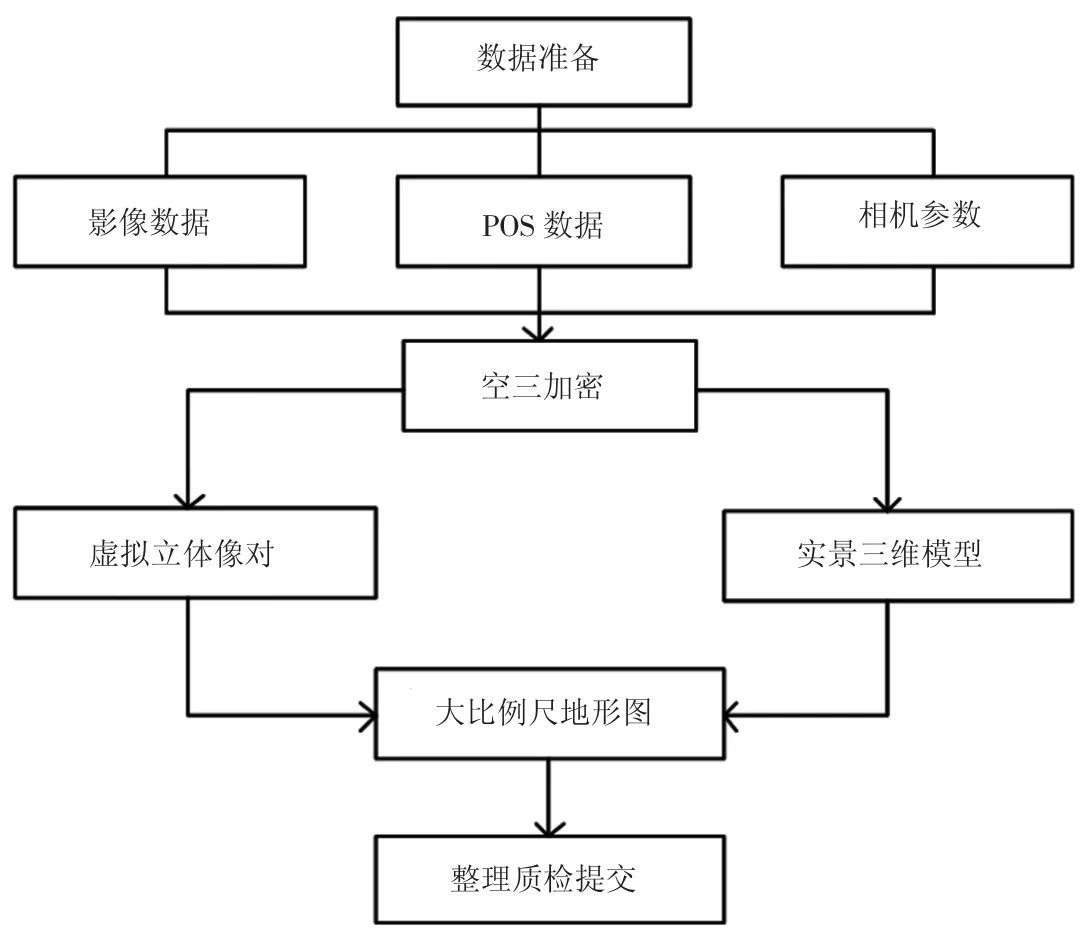
图2 倾斜摄影生产大比例尺地形图流程
3 案例分析
如图1 所示,可知在作业时,下视镜头是垂直地面拍摄的,侧视相机是以一定的倾角进行拍摄的。当倾角为45°时,由图1 可知,侧视相机中心点距离被摄物体的距离是下视相机中心点距离被摄物体的1.414 倍(假设地面平坦),由此可知,当采用同一款相同焦距的
3.1 像控测量
就目前技术来说,采用免像控技术生产的地形图,其精度还是很容易超限的,因此本次在数据生产时,需要采集像控点。首先是将数据生产范围和已有影像资料进行套合,然后在ArcGIS 软件中,按照400 m 左右的间隔,均匀布设一些像控点,在测区边缘和拐角区域均加密布设像控点,并对像控点进行统一的编号。布设完成后,将套合的成果输出为纸质图,提供个外业进行像控点数据的采集。为了提升像控点转刺精度,在实际作业过程中,均采用油漆喷涂的方式进行像控点的确定。一般常见的有“L”形靶标和对三角靶标,“L”形一般采用一种油漆喷涂,对三角通常采集2 种油漆喷涂。喷涂的点位一般选取四周遮挡少、不易被损坏的地方,这样对于侧视影像来说,像控点被遮挡的比率就会降低,点位使用率就会提升。本次采用红白油漆喷涂对三角靶标,然后在2 个相连的点位上采集坐标值,具体如图3 所示。

图3 像控点坐标值测量
为了防止偶然误差带来的影响,在坐标值采集时,每个点位采集次数不少于3 次,每次平滑次数不少于20 次,然后每次采集的坐标值,彼此较差在1 cm 内,最后取平均值作为最终的测量值。
3.2 航空摄影
航空摄影主要包扩航线规划和影像数据的航摄2部分内容。本次航线规划采用WapPointMaster 软件,导入任务区范围,设置航向、旁向重叠度为75%和80%,影像地面分辨率为0.05 m,选用下视焦距为35 mm,侧视为50 mm 的5 拼倾斜相机。沿着航向外扩2 条基线,平行航带外扩2 条航线,从而保证任务区边缘影像完整。在参数设置完成后,一键自动生成本次作业的航线轨迹数据。由于无人机续航时间短,本次生成的航线为多架次航线,部分规划的航线如图4 所示。
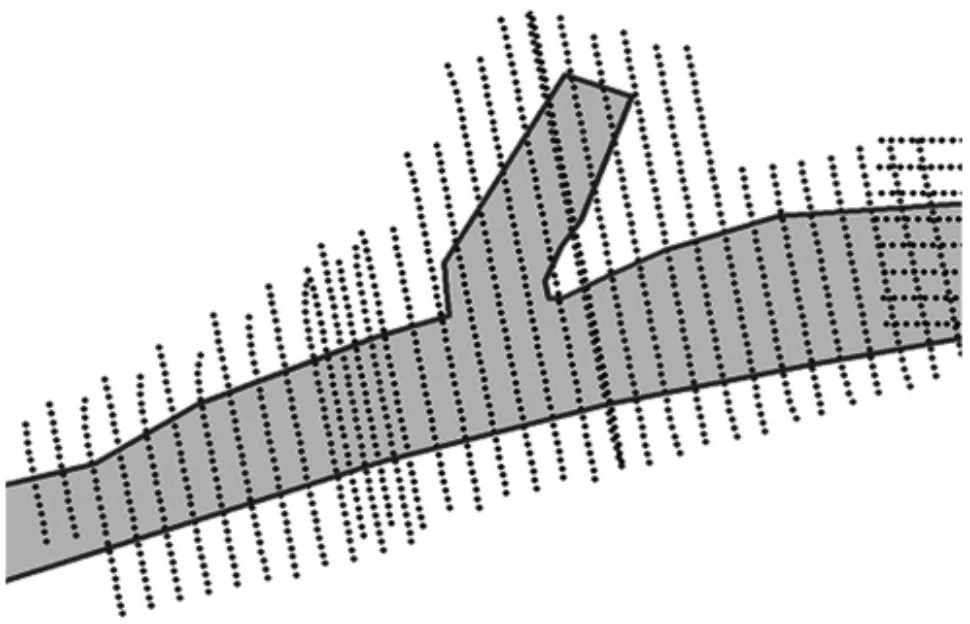
图4 航线示意图
其中孤立点点位曝光点,红色的范围为任务区范围线。将规划好的航线成果上传至飞控,完成本次航摄任务。待影像数据采集完成后,对影像数据的质量进行查看。采用flycheck 软件检查下视影像的重叠度和姿态,人机交互形式查看影像的清晰度、对比度等。经查,本次成果质量良好,符合相关规范和项目要求。
3.3 模型生产
对于倾斜数据的解算和三维模型的生产,目前可以使用的软件比较多,在综合分析了多款软件后[5],本次选用国产的瞰景Smart3D 软件进行数据的解算和三维模型的生产。首先对航摄的成果进行预处理,用拖把更名器更改影像的名字,确保无重名影像,然后按照影像名字更改对应的POS 名,确保影像和POS 准确对应。然后新建工程,加载影像数据和POS 数据,手动填写相机的焦距,并快速对输入的影像进行检查,确保无损坏的影像。然后提交空三任务,开启引擎,设置引擎路径,完成空三数据的解算和平差任务。自由网空三完成后,转刺像控点,完成加密点坐标系的转换。本次空三成果质量良好,可用于本次实景三维模型的生产,并导出优化后的影像内外方位元素和未畸变照片,用于虚拟立体像对的构建。
3.4 地形图测绘
本次地形图生产采用实景三维模型和虚拟立体像对相结合的方式进行。
3.4.1 基于实景三维模型采集
对于模型精度高、模型完整的区域,采用EPS 软件,直接在三维模型上进行地形图的采集。在采集的过程中,将采集的地形图成果和正射影像叠加,对测绘的成果进行查看,避免出现遗漏区域。由于模型可以从多个角度翻转查看,因此在采集房屋时,按照要求直接对屋檐进行改正。在采集等高线、高程点时,可以根据不同地形选择不同的采集方式。在植被稀少区域,可以通过画线或画面的方式,输入高程点距离或者密度,自动在模型上提取高程点;对于地形复杂区域,则直接在模型上手动采集高程点。对于等高线的生产,可采用高程点生产等高线,也可采用“水面淹没”的方式,设置高程值,然后同一高程值自动构成一个面,然后采集等高线。
3.4.2 基于虚拟立体像对采集
对于模型拉花区域,采用虚拟立体像对的方式进行地形图的补充测绘。将导出的内外方位元素和未畸变照片加载到航天远景MapMatrixGrid 软件中,依据像片之间的相邻关系,创建虚拟立体像对,然后导入已有的地形图成果,对其中未采集的区域,基于虚拟立体像对进行采集,从而得到更加完整的地形图成果。
2 种地形图采集方式相结合,大大地减少了外业补充测量的工作量,并且在对电力线走向进行判断时,模型上电力线查看模糊,可基于原始影像对电力线走向进行查看,从而减少外业属性调查的工作量,极大地提高了地形图的生产效率。
4 精度统计与评定
将检测点导入到EPS 软件中,对地形图精度进行检测,部分检测统计数据见表1。

表1 地形图精度检测统计表
利用同精度中误差计算方式,对本次地形图精度进行检测,计算得到本次地形图平面位置中误差为±0.168 m,高程中误差为±0.196 m,并且均为出现粗差值,成果精度符合1∶500 地形图精度要求。
5 结束语
本文介绍了倾斜摄影测量技术,并对其在大比例尺地形图生产中的作业流程进行了简单说明,以实际项目为例,对其中关键技术进行了详细阐述,并用检测点验证了本文方案生产地形图的可行性。通过对检测结果分析可知,本文生产的地形图,其精度可以达到1∶500 平地精度要求,可以为平地大比例尺地形图测绘带来借鉴。
猜你喜欢
小哥白尼(趣味科学)(2020年3期)2020-07-27
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
浙江工业大学学报(社会科学版)(2019年2期)2019-07-08
军营文化天地(2018年2期)2018-04-20
石油化工建设(2017年5期)2018-01-26
照明工程学报(2017年6期)2018-01-10
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
中国卫生(2016年2期)2016-11-12