高速低阻防过载犁耕装备设计与试验
2024-01-20 11:13:44刘进宝杨怀君张鲁云王子龙汤智辉
农业工程 2023年10期
刘进宝, 郑 炫, 杨怀君, 张鲁云, 李 帆, 王子龙, 汤智辉
(新疆农垦科学院机械装备研究所,新疆 石河子 830000)
0 引言
铧式犁是一种应用最为广泛的耕地机械,随着我国农业向着规模化、集约化的方向发展,农业机械相应地也朝着大型、宽幅、高速方向发展。在铧式犁研究方面,西方发达国家技术先进、成熟,在理论研究方面取得了大量成果,在高速减阻降耗作业等方面都展开了深入的研究。同时也涌现出一批铧式犁专业品牌,如雷肯、贝松、库恩等,研制的液压翻转犁结构简单紧凑、作业稳定性好、零部件可靠性高[1-2]。
我国的铧式犁技术与发达国家相比还存在差距,特别是作业性能和可靠性方面,但在液压翻转犁方面也开展了一定的研究。贺江川等[3]设计了一种1 LFT-550 型调幅式液压翻转栅条犁,有效提高了机具作业效率。邢璐露等[4]借鉴国外成熟技术,对液压翻转犁结构进行了针对性改进完善。刘兴爱等[5]、郑炫等[6]借鉴国外先进技术,并进行自主结构创新,先后研制出1 LB-542 型水平换向犁、1 LCH-546 型垂直换向犁、1 LFS-435 型浅翻深松翻转犁和1 LFT-435 型调心调幅式液压翻转犁等系列产品。
由于我国耕地土壤的差异性,使得土壤物理特性及力学特性复杂多变,尤其在黏重土壤条件下耕作时,大量土壤黏附在犁体表面,不仅增大了耕作阻力,还影响了犁体的入土、翻垡、碎土和覆盖等作业性能,降低了犁耕作业效率与质量,在砂石土中容易产生冲击破坏,结构可靠性和作业稳定性还有待进一步提高[7-9]。本研究在前期研究的基础上,设计一种悬挂式高速智能液压翻转犁,以期提高机具的可靠性、稳定性和适应性,为土壤高效高速耕作提供新型装备。
1 整机结构与工作原理
1.1 整机结构
高速液压翻转犁主要由悬挂机构、翻转机构、调幅机构、高速犁体总成、小前犁、犁柱总成、限深机构、犁架大梁及液压系统等组成,其结构如图1 所示。其中,高速犁体总成包括高速犁体曲面、犁铲尖、犁铧、犁侧板和犁托板,犁体呈左右对称;悬挂机构由上悬挂板、下悬挂轴和水平调节座组成;翻转机构由转轴、悬挂连接座和翻转液压油缸组成;调幅机构由犁架连接座、后连接座、调幅液压油缸和调节螺管组成;限深机构由限深轮、连接板和限位机构组成。

图1 翻转犁结构Fig.1 Structure of overturned plough
1.2 工作原理
高速液压翻转犁在耕地作业时,采用大功率轮式拖拉机为配套动力,通过拖拉机后三点悬挂装置与悬挂架连接,利用拖拉机悬挂高度调节系统,使犁体入土耕地作业,限深轮起到限制犁耕作业深度的作用。犁架上安装有左右对称的高速犁体总成,当单趟犁耕作业到地头后,通过翻转机构调转左右工作犁体,使回程犁耕作业翻土方向与去程翻土方向一致,从而提高了耕作效率。由于作业时拖拉机一侧轮胎在未耕土地上行走,另一侧轮胎在已耕土壤形成的沟渠中行走,拖拉机呈倾斜状态,因此需通过调节悬挂架水平调节座,保证犁体相对地面保持水平作业;根据耕作土壤情况,可通过调节调幅液压油缸和犁柱调幅板安装角度改变作业幅宽,达到最佳作业状态;同时可以调节限深轮高度,控制稳定的作业耕深。为了能适应配套不同型号的大功率轮式拖拉机,悬挂设置有快速挂接装置,犁体和犁柱总成通过主梁卡子连接在大梁上,根据拖拉机轮距和悬挂点位置,可以快速调整第一铧犁体的安装位置,达到最佳作业状态。翻转犁主要技术指标如表1 所示。
2 关键部件设计
2.1 拖拉机功率和作业幅宽
新疆维吾尔自治区(简称新疆)农田土壤普遍为沙壤土和砂黏土,犁耕比阻相对偏大,为最大限度满足参数配置,确定铧式犁与拖拉机配套作业的犁体数量关系。
式中P——拖拉机额定牵引力,N
n——配套犁体数量
K——犁耕比阻,kPa
ac——犁耕深度,cm
b4——单铧犁体幅宽,cm
η——拖拉机牵引力利用系数
根据新疆土壤特点,参考农业机械设计手册,犁耕比阻选取70。根据农艺技术要求,新疆农田耕深35 cm,采用单铧最大耕宽50 cm 的大宽幅犁体,拖拉机牵引力利用系数选取0.9,计算可得拖拉机额定牵引力68.05 kN。根据拖拉机参数规格可知,额定功率在147 kW 以上的拖拉机额定牵引力在70 kN 以上,因此配套动力选取147 kW 的拖拉机。整机结构参数配置如图2 所示。
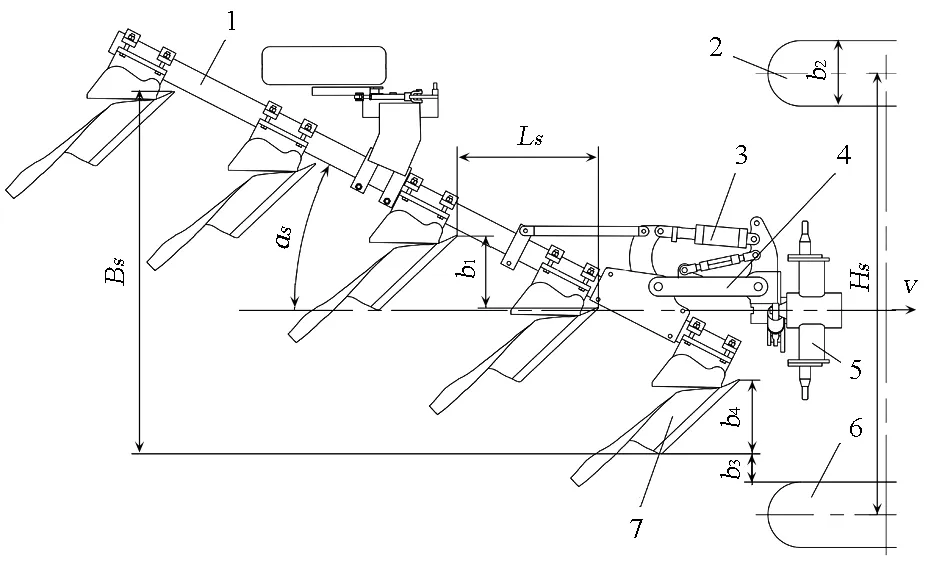
图2 翻转犁总体配置Fig.2 General configuration of turning plough
按照整体参数配置,最大总幅宽Bs=nb4=5×50=250 cm。
2.2 犁铧间距
根据后铧犁铲尖应位于由前铧犁铲尖所做的与铧刃线垂直并向胫刃线偏摩擦角的直线上的理论,犁体纵向间距Ls为
式中Ls——犁体纵向间距,cm
θ0——铧刃线与前进方向的夹角,(°)
ϕ——土壤与犁体材料的摩擦角,(°)
依据犁具结构可得犁架配置斜角αs为
根据前期研究结果,土壤与犁体材料的摩擦角ϕ=25.45°,本设计的铧刃线与前进方向夹角θ0=38°,因此可得犁体纵向间距Ls=100 cm,犁架配置斜角26.56°。
2.3 拖拉机与犁体间距配置
翻转犁耕地时轮式拖拉机右后轮处于犁沟底,为了保证犁耕过程不出现漏耕和重耕现象,第1 铧犁体与拖拉机右后轮内侧间距应设置合理,并且拖拉机后轮距应与犁具总幅宽相适应,拖拉机合理的右后轮内侧间距配置为
式中Hs——拖拉机后轮距,mm
b2——拖拉机后轮宽度,mm
b3——第1 铧犁体与拖拉机右后轮内侧间距,mm
以2204 型轮式拖拉机为例,采用轮胎宽度20 cm,一般情况下第1 铧犁体与拖拉机右后轮内侧间距取1~2 cm,因此拖拉机后轮距297 cm。
2.4 犁体结构设计
2.4.1 犁体曲面模型
犁体曲面导曲线设计如图3 所示,图中Sc为犁铧长度、ε0为入土角、hc为导曲线高度、θ0为初始元线角、Δθ为元线角变化量、z1为犁铧高度及z2为犁体的总高度。其中第1 段为直线部分,对应犁体的犁铧部分;第2 段为圆锥曲线。圆锥曲线的斜率随高度的增加逐渐增大,有利于土壤在犁壁中间位置处随犁体曲面向上抬升及翻垡。对其建立导曲线的数学模型,设圆锥曲线部分参数方程为
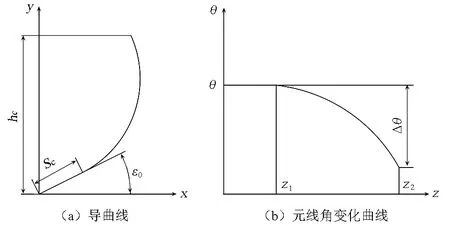
图3 犁体曲面参数Fig.3 Plow body surface parameters
式中f1、f2、f3、f4——化简后的曲线方系数
本设计主要考虑犁体减阻问题,根据犁耕作业要求,取ε0=25°,犁铲直线部分长度Sc=150 mm;初始元线角θ0=38°,θ角逐渐减小,在犁体中部抬垄部分元线角变化较慢,在犁体上部翻垄部分元线角变化较快。犁铧部分选取直线,其余部分选取抛物线,犁铧高度z1=Scsinθ0,犁体总高度z2=600 mm。
2.4.2 仿生结构
仿生设计能有效降低土壤黏附现象,将穿山甲体表的鳞片三角圆弧状结构和蜣螂体表的凸包结构相结合,按照比例放大表面轮廓结构尺寸,沿着土迹线依次排列在犁壁上,结构如图4 所示[10-12]。图中a0为凸起前端宽度、b0为凸起后端宽度、c0为凸起高度、e0为凸起前后端距离及x0为凸起排列间隔距离。本设计设置a0=10 mm、b0=20 mm、c0=8 mm、e0=25 mm 及x0=20 mm。
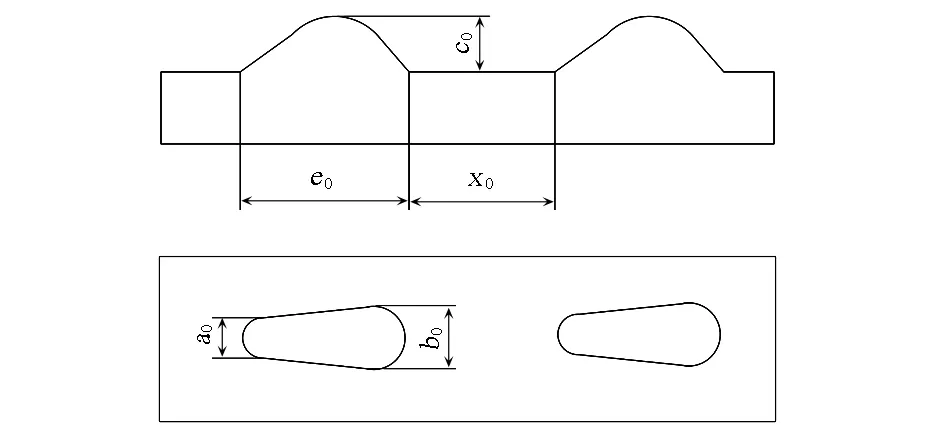
图4 犁体仿生设计Fig.4 Bionic design of plow body
2.5 防过载自动避障机构设计
2.5.1 机构原理
为解决在多石贫瘠土壤耕作中犁耕装备产生冲击破坏,设计了一种双向犁耕装备的过载保护自动避障机构,既保证犁体快速响应避开石头,又确保越过石头后又能快速复位工作,达到提高犁具可靠性、适应性和犁耕效率的目的。结构如图5 所示,图中A点为下连杆AD1DQ与机架的铰接点,B点为上连杆BCC1P与机架的铰接点,I和I1点为左右犁体质心,P和Q点为弹簧预紧作用点。C、C1、D和D1点分别为上连杆和下连杆的活动铰接点。
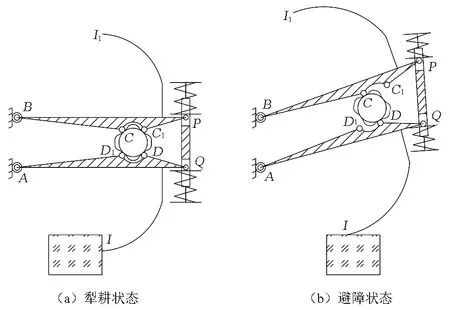
图5 防过载自动避障机构Fig.5 Anti-overload automatic obstacle avoidance mechanism
当犁体在土壤中正常工作时,弹簧具有一定的预紧力,使过载保护避障机构保持初始位置,各部件均处于图5a 所示状态。当犁体碰到坚硬物时,犁体受到的冲击力大于弹簧预紧力时,过载保护避障机构被触发,下连杆AD1DQ逆时针转动,机构构成了ABCD四杆机构,在逆时针转动过程中,P、Q两点间的距离逐渐增大,进一步挤压上下弹簧,当过载冲击与弹簧预紧力实现平衡时,达到避障平衡状态,此时机构处于图5b 状态。
2.5.2 机构运动分析
防过载运动时,机构可看作为由杆ADQ、杆BCP、连杆CD及机架AB组成的四杆机构,其中下犁体总成EI固定在下连杆ADQ上,上犁体总成E1I1固定在上连杆BCP上,机构运动简图如图6 所示。
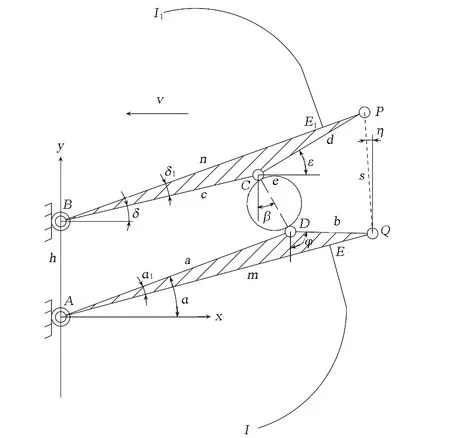
图6 机构运动Fig.6 Mechanism motion
在xAy坐标系中,在ABCDA封闭矢量多边形中,根据复数矢量形式和欧拉公式可得
式中a——杆AD的长度,mm
c——杆BC的长度,mm
e——滚轮支撑直径,mm
h——机架AB的长度,mm
α——杆AD 与水平方向夹角,(°)
β——杆CD 与竖直方向夹角,(°)
δ——杆BC 与水平方向夹角,(°)
根据P和Q点的坐标位置方程可知
式中xP、yP——P点在xAy坐标系中的坐标
xQ、yQ——Q点在xAy坐标系中的坐标
m——杆AQ长度,mm
n——杆BP长度,mm
α1——杆AD与AQ夹角,(°)
δ1——杆BC与BP夹角,(°)
根据弹性蓄能器结构可知,上下两组弹簧呈对称状,任意时刻上下两组弹簧弹力值大小相等,因此有
式中k——弹簧弹性系数,kN/mm
s1——弹簧原始长度,mm
s0——压缩后弹簧长度,mm
随着避障过程α角逐渐增大,犁体质心高度增加,弹簧弹力均在增加,弹簧弹性系数越小,弹簧弹力增加的幅度越小。通过前期犁耕阻力试验,得到犁耕阻力平均值9.74 kN,平衡状态下对应所需的弹簧预紧力9.75 kN,综合考虑机构运动副内部摩擦力等影响因素,取安全系数为1.3,因此初始状态预紧力12.67 kN。
3 犁体耕作过程仿真分析
采用EDEM 软件建立土壤仿真模型,选用 Hertz-Mindlin with JKR 模型。土壤的颗粒形状、尺寸、密度、泊松比和剪切模量等,通过前期研究结论获取[13]。材料参数如表2 所示。
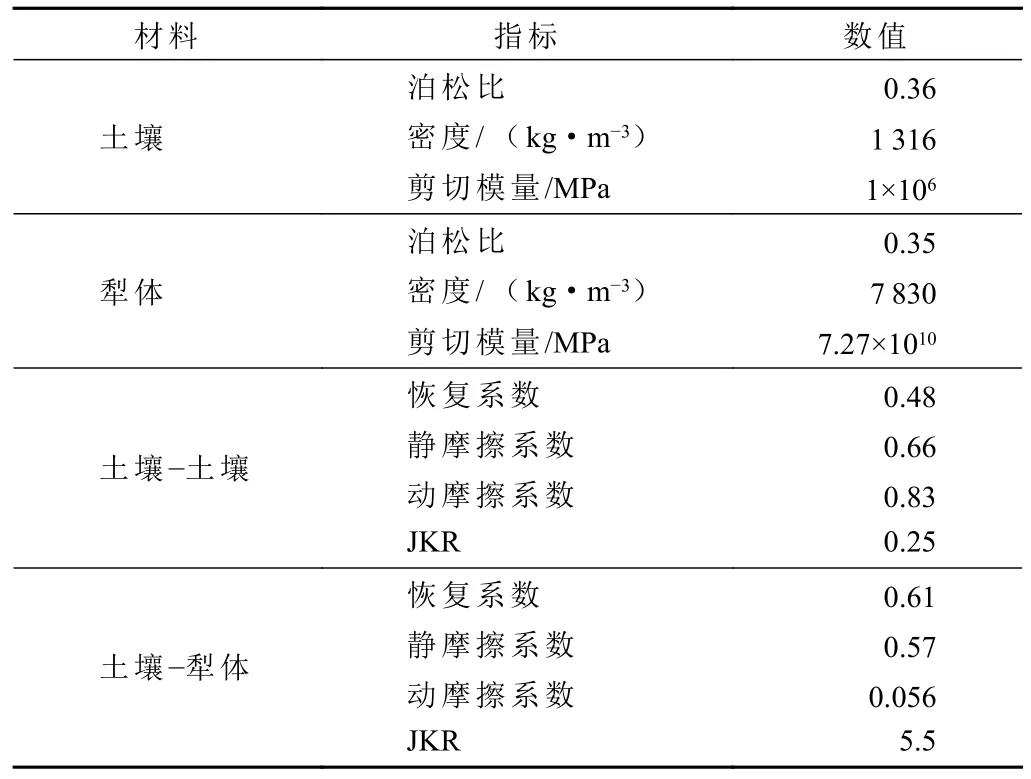
表2 材料参数Tab.2 Material parameters
利用SolidWorks 软件建立仿生减黏犁体三维模型,然后导入EDEM 软件,分别建立两种土壤模型,定义土壤和犁体材料参数。设置土壤颗粒间、土壤与犁体间的接触参数。仿真模型如图7 所示,仿真模型由两铧犁体组成,前铧犁体主要作用是开沟,后铧犁体为正常耕作状态。试验对比过程主要测量后铧犁体耕作相关数据。通过将土壤颗粒显示方式设置为Vector 方式和Stream 流方式,得到土壤颗粒矢量流动方向,可以直观看出土壤颗粒在犁体表面的流动轨迹。
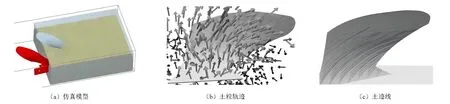
图7 犁体耕作仿真模型Fig.7 Simulation model of plow tillage
为减小土壤黏附现象和犁体耕作阻力,将传统犁体与仿生犁体进行仿真对比试验,通过仿真测定犁体完全进入土壤后耕作稳定状态下的阻力值。
犁体耕作阻力值如图8 所示,传统犁体平均耕作阻力7 157 N,仿生减黏犁体平均耕作阻力6 594 N,仿生减黏犁体相对传统犁体减阻7.8%。
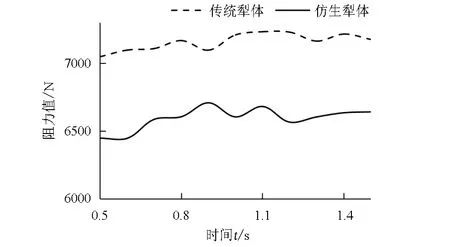
图8 犁体耕作阻力仿真Fig.8 Simulation of plough tillage resistance
4 田间试验
4.1 仿生犁体减黏试验
试验仪器有SC-900 型土壤坚实度仪、TDR300 型土壤含水率检测仪、皮尺、钢板尺及电子秤等,田间试验配套动力为约翰迪尔2204 型拖拉机,试验犁体有传统犁体、光滑减黏犁体(优化的犁体曲面,但未应用仿生结构)和仿生减黏犁体,试验如图9 所示。试验过程中设置犁体耕深300 mm,耕宽350 mm,耕作速度2.78 m/s。犁体每作业5 km,测量1 次土壤黏附量,将3 种试验犁体表面黏附的土壤分别称质量,每种犁体测量3 组数据取平均值。
测量结果显示,传统犁体土壤黏附量5.82 kg,光滑减黏犁体土壤粘附量4.96 kg,仿生减黏犁体土壤黏附量3.25 kg,其中仿生减黏犁体对土壤的减黏效果最为明显,光滑减黏犁体相对传统犁体土壤减粘性能提升14.78%。仿生减黏犁体相对传统犁体土壤减黏性能提升44.15%。
4.2 整机性能试验
试验地点:新疆生产建设兵团第八师145 团。试验田地表平坦,土壤类型为黏性土壤,前茬作物为棉花,地表植被残茬覆盖量平均值927 g。通过计算样本数据的变异系数判断试验数据的稳定性。
式中Cv——变异系数
σ——标准差
N——样本数量
X——样本绝对平均值
土壤含水率如表3 所示,坚实度如表4 所示。经测量,试验田土壤含水率平均值为21.69%,土壤平均坚实度250.7 kPa。
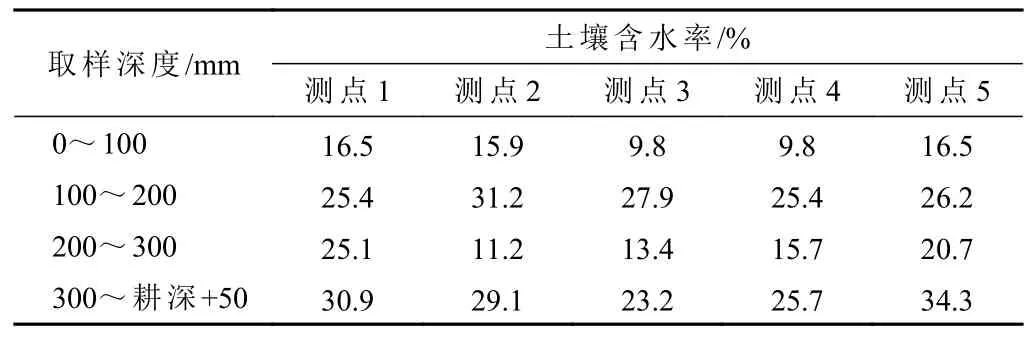
表3 土壤含水率Tab.3 Soil moisture content

表4 土壤坚实度Tab.4 Soil firmness
4.3 试验结果
根据田间试验结果可得,作业幅宽2 000 mm,平均作业深度339 mm,耕深稳定性变异系数2.86%,耕作深度如表5 所示。平均作业速度10.33 km/h,地表以下植被和残茬覆盖率99.95%,80 mm 深度以下植被和残茬覆盖率99.95%,植被和残茬覆盖率如表6 所示。土垡破碎率97.1%,土垡破碎率如表7 所示。
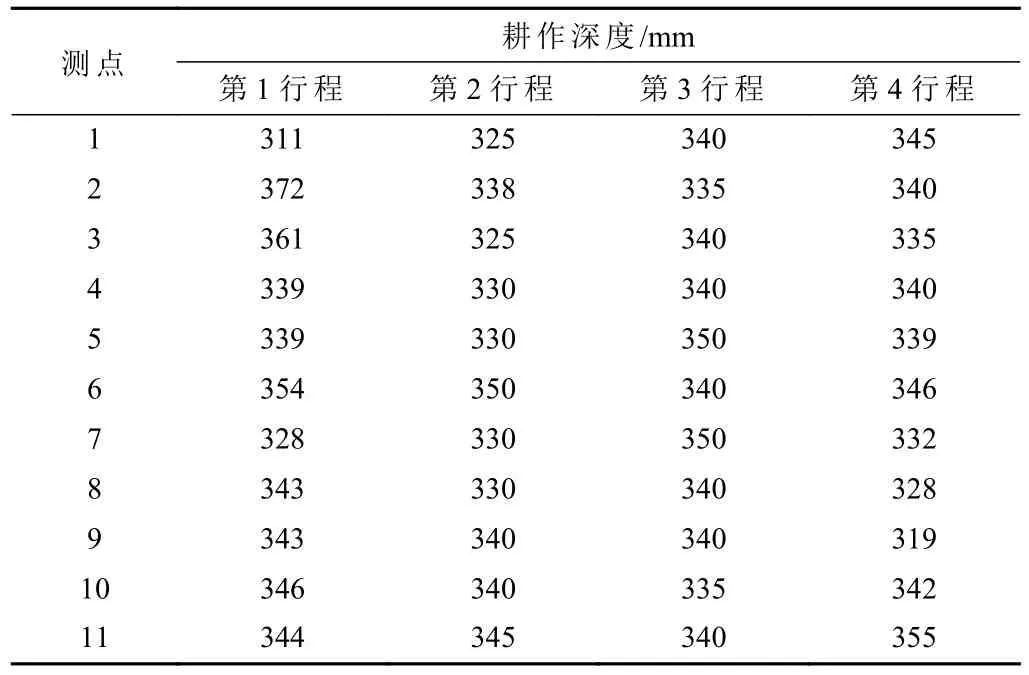
表5 耕作深度Tab.5 Tillage depth
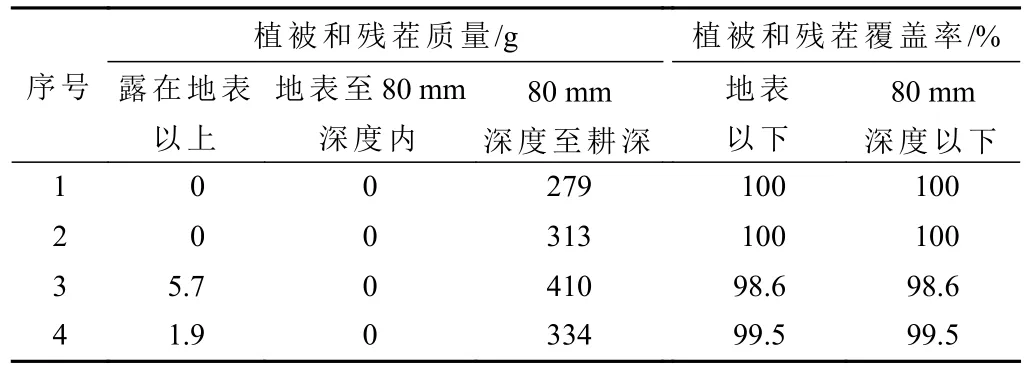
表6 植被和残茬覆盖率Tab.6 Vegetation and stubble coverage

表7 土垡破碎率Tab.7 Breaking rate of soil
5 结束语
(1)研制了一种高速智能液压翻转犁,优化了拖拉机功率和作业幅宽、犁铧间距、拖拉机与犁体间距配置等整体结构与配置参数。
(2)以穿山甲体表的鳞片三角圆弧状结构和蜣螂体表的凸包结构相结合作为仿生原型,将凸包结构沿着土迹线依次排列在犁壁上的方法设计了一种仿生犁体,同时设计了一种双向犁耕装备的过载保护自动避障机构,分析了避障过程。
(3)建立了犁体耕作过程离散元仿真模型。仿真和田间试验表明,仿生减黏犁体相对传统犁体土壤减黏性能提升44.15%,减阻7.8%。耕深稳定性变异系数2.86%,土垡破碎率97.1%。
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
新高考·高一物理(2016年10期)2017-07-07 12:17:11
小学生导刊(2017年15期)2017-05-17 05:44:08
小布老虎(2016年12期)2016-12-01 05:47:00
水土保持研究(2016年4期)2016-10-21 02:28:59
新农业(2016年15期)2016-08-16 03:40:48
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30
土壤与作物(2015年3期)2015-12-08 00:46:58
山东农机化(2015年6期)2015-01-03 08:09:44