
改进蚁群算法的森林防火移动机器人路径规划
2024-01-19 14:22:07杨松,洪涛,朱良宽
森林工程 2024年1期
杨松,洪涛,朱良宽




摘要:为解决森林防火移动机器人在森林地形条件的最优路径规划问题,提出一种基于拓展邻域的改进蚁群算法。首先引入定向邻域拓展策略,并将搜索邻域从8个拓展至10个拓展,以求扩大搜索效率与范围;然后综合考虑影响移动机器人的多种因素,利用路径长度和能耗改进启发函数;接着通过位置信息改进初始信息素;最后结合最大-最小蚂蚁系统(MMAS)和精英蚂蚁等算法模型的优点,改进信息素更新规则。结果表明,所提出的改进蚁群算法与传统蚁群算法、基于多启发因素的改进蚁群算法相比,路径长度分别缩短7.66%、6.53%,能耗指标分别下降62.2%、49.3%,综合指标分别下降32.6%、23.1%。研究显示所提出的改进蚁群算法具有更强的全局搜索能力和较好的应用价值。
关键词:拓展邻域;路径规划;蚁群算法;移动机器人;森林防火
中图分类号:S762,TP242文献标识码:A文章编号:1006-8023(2024)01-0152-08
Forest Fire Prevention Mobile Robot Path Planning Based on Improved Ant Colony Algorithm
YANG Song, HONG Tao, ZHU Liangkuan
(College of Computer and Control Engineering, Northeast Forestry University, Harbin 150040, China)
Abstract:To solve the problem of optimal path planning for forest fire prevention mobile robots in forest terrain conditions, an improved ant colony algorithm based on extended neighborhood was proposed. Firstly, the plan of directional extended neighborhood was introduced, and the search neighborhood was extended from 8 to 10, which was in an attempt to expand search efficiency and scope. Then, considering multiple factors that affect the mobile robot, path length and energy consumption were used to improve heuristic functions. Next, the initial pheromone was improved by incorporating location information. Finally, the advantages of the Max-Min Ant System (MMAS) and the elite ant model were combined to improve the pheromone updating rule. Results indicated that the proposed improved algorithm compared with traditional ant colony algorithm and the ant colony algorithm based on multiple inspired factor, which can shorten the path length by 7.66% and 6.53%, reduce energy consumption by 62.2% and 49.3%, decrease the comprehensive index by 32.6% and 23.1%. The research demonstrated that the proposed improved ant colony algorithm had stronger global search capabilities and considerable practical value.
Keywords:Extended neighborhood; path planning; ant colony algorithm; mobile robot; forest fire prevention
0引言
近年來,随着全球气候变暖和极端天气事件增多,全球进入了森林火灾的高发期,森林防火形势非常严峻[1]。森林火灾是一种突发性极强的公共危险事件,解决困难且发生突然,往往在短时间内迅速蔓延[2]。此外,森林防火及其检测难度都非常高,仅靠人力检测和防治,难度大、成本高、劳动强度大,且风险极高,为了提高森林防火和检测的效率和安全性,需要研发一种高效且快速的森林防火移动机器人,该机器人可以在森林地形复杂的情况下进行火灾探测和清理等消防作业。因此,在全局环境信息已知的情况下,探讨森林防火移动机器人路径规划问题是切实可行的[3]。
路径规划问题一直以来都是移动机器人的研究关键,其研究目的是根据已知的环境信息规划出一条从当前节点到目标节点行之有效的最优路径,路径的优劣主要表现在路径长短、转折点多少和安全性等方面[4]。目前常用的路径规划方法有Dijkstra算法、A*算法、人工势场法、粒子群算法、蚁群算法和深度学习等[5-10]。其中,蚁群算法是由Dorigo等[11]提出模仿自然界中蚂蚁觅食行为的一种启发式搜索算法,该算法已经能够有效解决移动机器人路径规划问题,但仍存在着收敛速度慢、易进入局部最优的现象,且实际环境复杂多样,传统算法单纯仅考虑路程因素也难以应对实际复杂情况。针对这些问题,不少学者给出了相关改进算法。刘双双等[12]采用定向邻域拓展重新定义蚂蚁移动规则,其算法寻优性能和收敛能力均得到提升。鲁飞等[13]通过改进初始信息素分配,在启发函数中引入夹角因素,提升了算法性能,但耗时较长。魏立新等[14]提出一种改进蚁群算法与DWA算法相融合的算法,性能得到提升同时能够有效规避障碍物。LUO等 [15]构造非均匀信息素,引入了动态惩罚方法,算法的全局最优搜索能力和收敛速度都有很大提高。以上文献利用蚁群算法改进移动机器人的路径规划性能,但在考虑实际情况方面仍存在不足,如启发式因素不够全面,仅考虑路径因素等,而李理等[16]虽然考虑到了路程、平滑性等因素,但仍存在搜索效率低、算法易出现停滞等问题。
根据森林防火移动机器人在森林地形环境工作的特点,本研究在前人研究的基础上,针对李理等[16]研究的不足,提出一种改进蚁群算法,采用定向邻域拓展策略,将蚂蚁的搜索方向从8个拓展到10个,扩大搜索效率与范围;改进启发函数,利用路径长度和能耗因素共同引导;依据当前节点与起点终点连接的位置关系和与相邻节点的相对高度差计算,并改进非均匀分布的初始信息素,减少蚂蚁搜索的盲目性;结合多因素启发信息改进信息素更新规则,并引入精英排序思想加快收敛,为避免算法过早收敛早熟,与最大-最小蚂蚁系统相结合,进而提高算法解的多样性。
1改进蚁群算法的路径规划
1.1环境模型的建立
在复杂森林地形下,为了能使机器人安全有效地规划出路径,对森林地形的实际物理环境空间转换成栅格地图,且对障碍物做膨胀处理,若出现部分栅格中存在障碍物未占满整个栅格的情况,将整个栅格视为障碍物,从而保障机器人移动的安全性,这里规定机器人移动路径不能与障碍栅格接触。森林环境中不仅仅只有障碍物的存在,高度的变化也不容忽视,林区的颠簸环境极大地影响了机器人的行进速度和能量损耗,为更好地模拟林区环境,在建模中引入高度量。
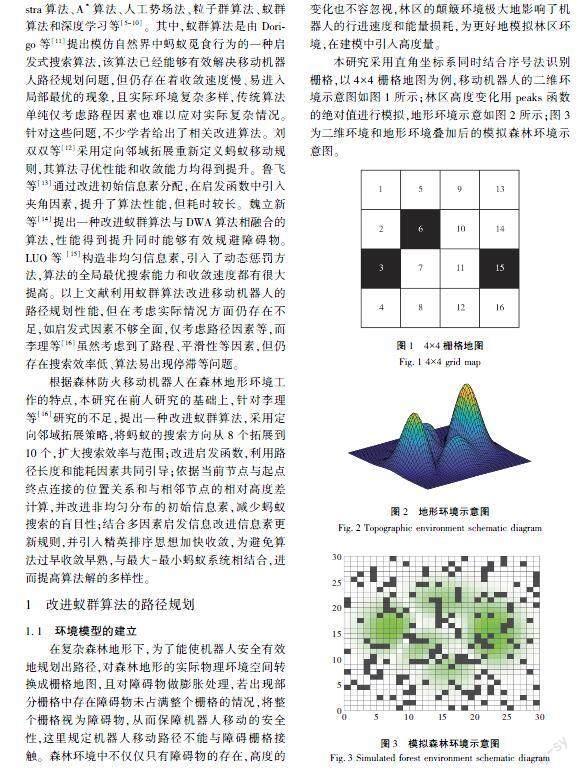
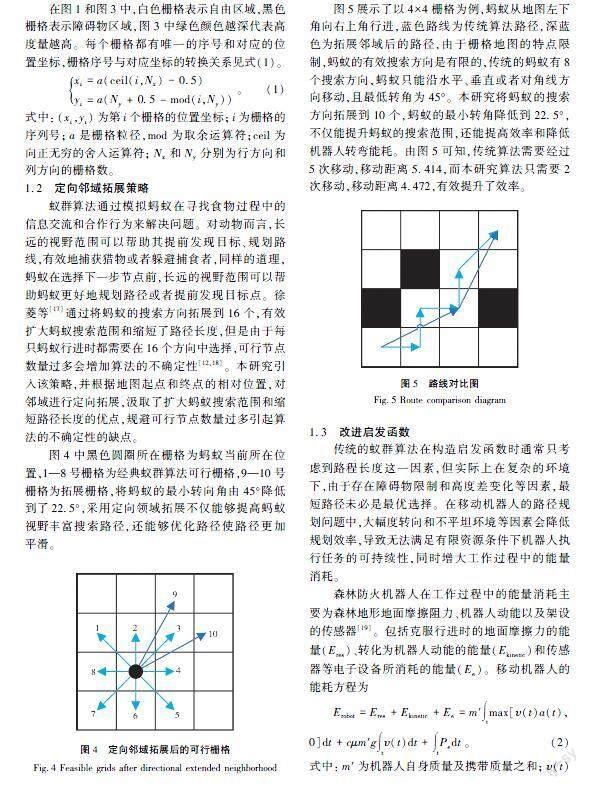
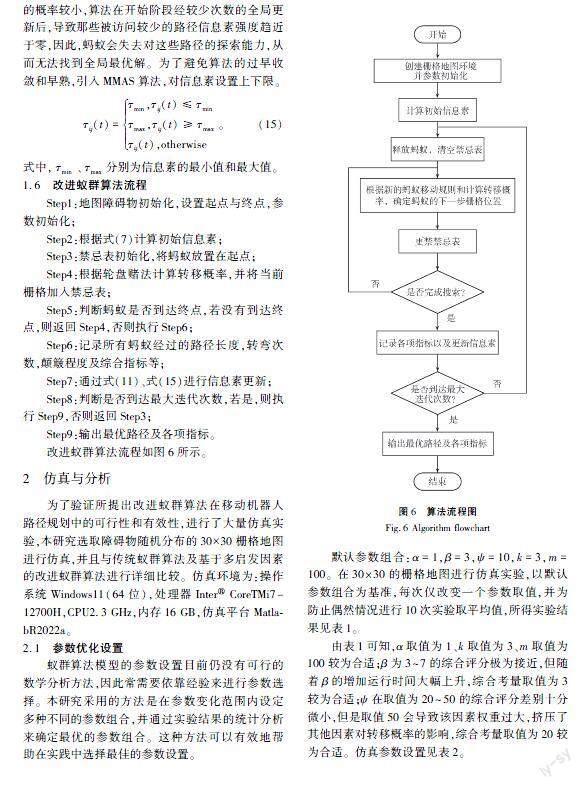
本研究采用直角坐标系同时结合序号法识别栅格,以4×4栅格地图为例,移动机器人的二维环境示意图如图1所示;林区高度变化用peaks函数的绝对值进行模拟,地形环境示意如图2所示;图3为二维环境和地形环境叠加后的模拟森林环境示意图。
在图1和图3中,白色栅格表示自由区域,黑色栅格表示障碍物区域,图3中绿色颜色越深代表高度量越高。每个栅格都有唯一的序号和对应的位置坐标,栅格序号与对应坐标的转换关系见式(1)。
xi=a(ceil(i,Nx)-0.5)
yi=a(Ny+0.5-mod(i,Ny)) 。(1)
式中:(xi,yi)为第i个栅格的位置坐标;i为栅格的序列号;a是栅格粒径,mod为取余运算符;ceil为向正无穷的舍入运算符;Nx和Ny分别为行方向和列方向的栅格数。
1.2定向邻域拓展策略
蚁群算法通过模拟蚂蚁在寻找食物过程中的信息交流和合作行为来解决问题。对动物而言,长远的视野范围可以帮助其提前发现目标、规划路线,有效地捕获猎物或者躲避捕食者,同样的道理,蚂蚁在选择下一步节点前,长远的视野范围可以帮助蚂蚁更好地规划路径或者提前发现目标点。徐菱等[17]通过将蚂蚁的搜索方向拓展到16个,有效扩大蚂蚁搜索范围和缩短了路径长度,但是由于每只蚂蚁行进时都需要在16个方向中选择,可行节点数量过多会增加算法的不确定性[12,18]。本研究引入该策略,并根据地图起点和终点的相对位置,对邻域进行定向拓展,汲取了扩大蚂蚁搜索范围和缩短路径长度的优点,规避可行节点数量过多引起算法的不确定性的缺点。
图4中黑色圆圈所在栅格为蚂蚁当前所在位置,1—8号栅格为经典蚁群算法可行栅格,9—10号栅格为拓展栅格,将蚂蚁的最小转向角由45°降低到了22.5°,采用定向领域拓展不仅能够提高蚂蚁视野丰富搜索路径,还能够优化路径使路径更加平滑。
图5展示了以4×4栅格为例,蚂蚁从地图左下角向右上角行进,蓝色路线为传统算法路径,深蓝色为拓展邻域后的路径,由于栅格地图的特点限制,蚂蚁的有效搜索方向是有限的,传统的蚂蚁有8个搜索方向,蚂蚁只能沿水平、垂直或者对角线方向移动,且最低转角为45°。本研究将蚂蚁的搜索方向拓展到10个,蚂蚁的最小转角降低到22.5°,不仅能提升蚂蚁的搜索范围,还能提高效率和降低机器人转弯能耗。由图5可知,传统算法需要经过5次移动,移动距离5.414,而本研究算法只需要2次移动,移动距离4.472,有效提升了效率。
1.3改进启发函数
传统的蚁群算法在构造启发函数时通常只考虑到路程长度这一因素,但实际上在复杂的环境下,由于存在障碍物限制和高度差变化等因素,最短路径未必是最优选择。在移动机器人的路径规划问题中,大幅度转向和不平坦环境等因素会降低规划效率,导致无法满足有限资源条件下机器人执行任務的可持续性,同时增大工作过程中的能量消耗。
森林防火机器人在工作过程中的能量消耗主要为森林地形地面摩擦阻力、机器人动能以及架设的传感器[19]。包括克服行进时的地面摩擦力的能量(Eres)、转化为机器人动能的能量(Ekinetic)和传感器等电子设备所消耗的能量(Ee)。移动机器人的能耗方程为
Erobot=Eres+Ekinetic+Ee=m′∫tmax[υ(t)a(t),
0]dt+cμm′g∫tυ(t)dt+∫tPedt。(2)
式中:m′为机器人自身质量及携带质量之和;υ(t)和a(t)分别表示机器人在t时刻的线速度和加速度;g为重力加速度;μ为森林地形地面摩擦系数;c为机器人固有属性参数,取决于底盘结构;Pe为传感器等电子设备的功耗。
由能耗方程可知,移动机器人的能耗由机器人自身及携带质量、地形状况、路线距离、运行模式以及传感器等电子设备构成,这些都为移动机器人执行任务的可持续性提出了更高要求。机器人动能以及架设传感器的能量消耗难以避免,所以降低能量损耗主要体现在克服摩擦力上,而传统蚁群算法由于其单纯地以路径长度为启发函数,往往导致搜索的路径能耗较大,针对传统算法的缺陷,本研究引入了一种基于多启发式路径优化策略的规划方法,从而提高移动机器人在有限资源环境中的可持续性作业能力。
为了使启发函数有更好的引导作用,做以下更改
ηmij(t)=φ(i,j)+γmij(t)+ν(i,j) 。(3)
式中:φ(i,j)为距离因子,表示待转移栅格;γmij(t)和ν(i,j)分别为曲折因子和颠簸因子。
φ(i,j)=kdmax-d(j,q)dmax-dmin+e+1/d(i,j) 。(4)
式中:dmax、dmin表示待转移栅格到目标栅格的最大和最小距离;di,j表示当前栅格与待转移栅格之间的距离;k为距离启发式函数的比例系数;e为一较小常数,以防止出现分母为0的情况。
γmij=ηψ,Tm(l)=Tm(l-1)
(1-η)ψallowedmi,otherwise 。(5)
式中:η、ψ分别代表百分比和转弯启发式常量;Tm(l)表示第m只蚂蚁在第l次移动的方向标号;allowedmi表示第m只蚂蚁在位置i所能转移的栅格总数。
ν(i,j)=khmax-h(i)-h(j)hmax-hmin+e。 (6)
式中:h(i)表示栅格i的高度;hmax、hmin表示当前栅格与待转移栅格之间最大与最小高度差。
1.4改进初始化信息素
当所有路径上的初始信息素浓度相等时,蚂蚁缺乏引导,可能会探索到一些错误的路径,导致搜索效率降低。此时需要通过设置一个合适的初始信息素浓度来引导蚂蚁在搜索过程中更有可能探索到最优路径。因此,为了更有效地引导蚂蚁前进,提出了一种新的初始信息素的设置方式。
τij(0)=C+ξ+δ。(7)
ξ=a/|h(j)-h(i)| 。(8)
δ=b(1/f(i))(1/f(j))。 (9)
f(x)=εg1(x)+(1-ε)g2(x) 。 (10)
式中:C为一常数;ξ为势差因子,表示待转移栅格与当前栅格的高度变化;δ为偏置因子;g1(x)为起始点与当前点的间距;g2(x)为目标点与当前点的间距。其思想基于一种偏斜启发式的方式对初始信息素进行非均匀化处理,由于2点之间直线最短,通过增加靠近起始点与目标点连线的信息素来更好地指导蚂蚁在初始阶段的路径选择。
1.5改进信息素更新规则
在蚁群算法中,信息素的更新是通过模拟天然蚂蚁行为的信息素自然挥发和蚂蚁释放信息素进行积累来实现的。为了更好地优化算法性能,本研究将最大-最小蚂蚁系统(MMAS)的基本模型与精英排序算法相结合。通过这种方法,可以更加有效地引导蚂蚁搜索最优路径,并且提高算法的搜索效率。在信息素更新过程中,除了对所有可行路径增加信息素外,还引入了精英蚂蚁。这些蚂蚁生成路径后,根据路径综合评分进行排序,排名靠前的蚂蚁会对信息素轨迹量的更新贡献更大,因为其更可能找到更短、更优的路径。通过引入精英蚂蚁,本研究所提出的改进蚁群算法可以更快、更有效地找到最优解。信息素根据下式进行更新
τij(t+1)=(1-ρ)τij(t)+∑mk=1Δτkij(t)+∑σφ=1Δτφij(t) 。 (11)
Δτkij(t)=Q/Sk,蚂蚁k过路径(i,j)
0,否则 。(12)
Δτφij(t)=(σ-φ)Q/Sφ,若第φ只最好的蚂蚁经过路徑(i,j)
0,否则。 (13)
S(t)=xL(t)+yF(t)+zT(t) 。(14)
式中:φ为精英蚂蚁序号;Δτφij表示由第φ只精英蚂蚁引起的路径(i,j)上的额外信息素量的增加;σ为精英蚂蚁的数量;S是路径综合评分;x、y、z为相应的调节系数;L、F、T分别代表当次有效路径的路径长度、高度的均方差和转弯次数。
将蚂蚁的搜索行为集中在最优解附近的策略可以提高搜索的效率和准确性,但是此策略容易导致算法陷入早熟收敛的问题。某路径(i,j)被访问的概率较小,算法在开始阶段经较少次数的全局更新后,导致那些被访问较少的路径信息素强度趋近于零,因此,蚂蚁会失去对这些路径的探索能力,从而无法找到全局最优解。为了避免算法的过早收敛和早熟,引入MMAS算法,对信息素设置上下限。
τij(t)=τmin,τij(t)≤τmin
τmax,τij(t)≥τmax
τij(t),otherwise 。(15)
式中,τmin、τmax分别为信息素的最小值和最大值。
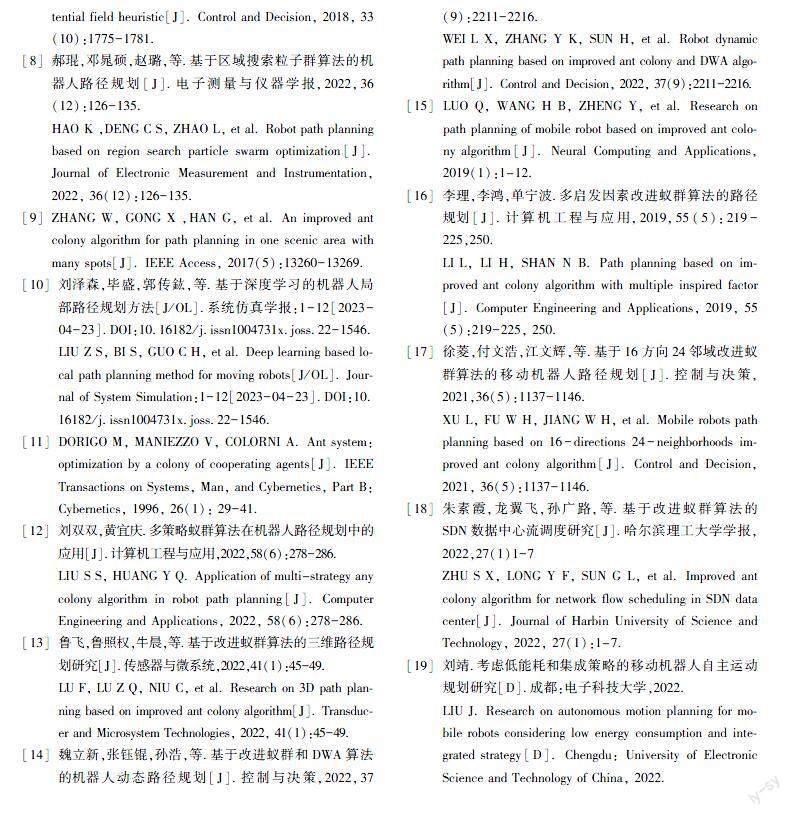
1.6改进蚁群算法流程
Step1:地图障碍物初始化,设置起点与终点,参数初始化;
Step2:根据式(7)计算初始信息素;
Step3:禁忌表初始化,将蚂蚁放置在起点;
Step4:根据轮盘赌法计算转移概率,并将当前栅格加入禁忌表;
Step5:判断蚂蚁是否到达终点,若没有到达终点,则返回Step4,否则执行Step6;
Step6:记录所有蚂蚁经过的路径长度,转弯次数,颠簸程度及综合指标等;
Step7:通过式(11)、式(15)进行信息素更新;
Step8:判断是否到达最大迭代次数,若是,则执行Step9,否则返回Step3;
Step9:输出最优路径及各项指标。
改进蚁群算法流程如图6所示。
2仿真与分析
为了验证所提出改进蚁群算法在移动机器人路径规划中的可行性和有效性,进行了大量仿真实验,本研究选取障碍物随机分布的30×30栅格地图进行仿真,并且与传统蚁群算法及基于多启发因素的改进蚁群算法进行详细比较。仿真环境为:操作系统Windows11(64位),处理器InterCoreTMi7-12700H,CPU2.3 GHz,内存16 GB,仿真平台MatlabR2022a。
2.1参数优化设置
蚁群算法模型的参数设置目前仍没有可行的数学分析方法,因此常需要依靠经验来进行参数选择。本研究采用的方法是在参数变化范围内设定多种不同的参数组合,并通过实验结果的统计分析来确定最优的参数组合。这种方法可以有效地帮助在实践中选择最佳的参数设置。
默认参数组合:α=1,β=3,ψ=10,k=3,m=100。在30×30的栅格地图进行仿真实验,以默认参数组合为基准,每次仅改变一个参数取值,并为防止偶然情况进行10次实验取平均值,所得实验结果见表1。
由表1可知,α取值为1、k取值为3、m取值为100较为合适;β为3~7的综合评分极为接近,但随着β的增加运行时间大幅上升,综合考量取值为3较为合适;ψ在取值为20~50的综合评分差别十分微小,但是取值50会导致该因素权重过大,挤压了其他因素对转移概率的影响,综合考量取值为20较为合适。仿真参数设置见表2。
2.230×30栅格地图仿真
将本研究提出的改进蚁群算法与传统算法、李理等[16]所提出的算法进行仿真比较以验证算法寻优能力,仿真结果如图7—图10所示。
由仿真结果可知,本研究提出的改进蚁群算法在各方面均有一定提升。从生成的最优路径来看,传统算法横穿地图地势较高的绿色区域,而本研究提出的改进蚁群算法和李理等[16]所提出的算法均较好地避开了该区域;从收敛能力上来看,本研究所提出的改进蚁群算法收敛效果更好,这是因为在算法初期,另外2种算法由于在迭代开始时信息素分布均匀,蚂蚁的搜索具有很大盲目性,信息素的正反馈作用较弱,导致算法初期蚂蚁行进方向过于混乱,而本研究所提出的改进蚁群算法采用非均匀的初始信息素,很好地避免了这个问题;从其余各项指标来看,也均优于另外2种算法,这是因为本研究采用了定向邻域拓展策略和多因素启发函数,不仅丰富了蚂蚁的搜索方向,还可以使路线转弯次数更少,路径更平滑,路程也更短。
为进一步验证算法可靠性,在该地图中共进行10次的仿真实验取平均值。仿真结果见表3 。
由表3可以看出,与传统算法及李理等[16]所提出的算法相比,本研究所提出的改进蚁群算法在路径长度上分别缩短1.97%、3.63%,能耗指标分别下降56.2%、47.2%,而综合指标分别下降26.6%、21.2%。
3结束语
根据森林防火移动机器人在森林地形环境工作的特点,本研究提出了一种改进蚁群算法。该算法引入定向拓展邻域策略,将蚂蚁的转移栅格从8个提升至10个,提升了蚂蚁的搜索范围,不仅使最优路径变短还使得路径更加平滑;依据森林防火机器人的特点,用路径长度和能耗改进启发函数,降低工作过程的能量损耗;利用当前节点与起点、终点连接的位置关系和与相邻节点的相对高度差计算,并且改进非均匀分布的初始信息素,有效避免算法初始阶段的盲目搜索问题;结合MMAS和精英蚂蚁算法模型的优点,改进信息素更新规则,避免过早收敛。仿真结果表明,所提出的改进蚁群算法具有更强的适应性,能获得更好的性能指标,全局搜索能力更强,能够有效地缩短路径长度和降低能耗,进而提升森林防火移动机器人的工作效率。
【参考文献】
[1]韩雪宁,王建斌.我國森林防火行业市场发展现状及风险研究[J].经济研究导刊,2022(7):65-67.
HAN X N, WANG J B. Research on the current situation and risks of the forest fire prevention industry market development in China[J]. Economic Research Guide, 2022(7):65-67.
[2]布升强,梅淼,李琼琼,等.森林防火机器人轨迹寻踪技术研究[J]森林工程,2020,36(3):44-52.
BU S Q, MEI M, LI Q Q, et al. Research on path tracking technology of forest fireproof robot[J]. Forest Engineering, 2020, 36(3):44-52.
[3]孙上杰,姜树海,崔嵩鹤,等.基于深度学习的森林消防机器人路径规划[J].森林工程,2020,36(4):51-57.
SUN S J, JIANG S H, CUI S H, et al. Path planning of forest fire fighting robots based on deep learning[J]. Forest Engineering, 2020, 36(4):51-57.
[4]朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.
ZHU D Q,YAN M Z. Survey on technology of mobile robot path planning[J]. Control and Decision,2010,25(7):961-967.
[5]LUO M, HOU X, YANG J. Surface optimal path planning using an extended dijkstra algorithm[J]. IEEE Access, 2020, 8:147827-147838.
[6]XIANG D, LIN H, OUYANG J, et al. Combined improved A* and greedy algorithm for path planning of multi-objective mobile robot[J]. Scientific Reports, 2022(12):13273.
[7]王晓燕,杨乐,张宇,等.基于改进势场蚁群算法的机器人路径规划[J].控制与决策,2018,33(10):1775-1781.
WANG X Y, YANG L, ZHANG Y, et al. Robot path planning based on improved ant colony algorithm with potential field heuristic[J]. Control and Decision, 2018, 33(10):1775-1781.
[8]郝琨,邓晁硕,赵璐,等.基于区域搜索粒子群算法的机器人路径规划[J].电子测量与仪器学报,2022,36(12):126-135.
HAO K ,DENG C S, ZHAO L, et al. Robot path planning based on region search particle swarm optimization[J]. Journal of Electronic Measurement and Instrumentation, 2022, 36(12):126-135.
[9]ZHANG W, GONG X ,HAN G, et al. An improved ant colony algorithm for path planning in one scenic area with many spots[J]. IEEE Access, 2017(5):13260-13269.
[10]刘泽森,毕盛,郭传鈜,等.基于深度学习的机器人局部路径规划方法[J/OL].系统仿真学报:1-12[2023-04-23].DOI:10.16182/j.issn1004731x.joss.22-1546.
LIU Z S, BI S, GUO C H, et al. Deep learning based local path planning method for moving robots[J/OL]. Journal of System Simulation:1-12[2023-04-23].DOI:10.16182/j.issn1004731x.joss.22-1546.
[11]DORIGO M, MANIEZZO V, COLORNI A. Ant system: optimization by a colony of cooperating agents[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 1996, 26(1): 29-41.
[12]刘双双,黄宜庆.多策略蚁群算法在机器人路径规划中的应用[J].计算机工程与应用,2022,58(6):278-286.
LIU S S, HUANG Y Q. Application of multi-strategy any colony algorithm in robot path planning[J]. Computer Engineering and Applications, 2022, 58(6):278-286.
[13]鲁飞,鲁照权,牛晨,等.基于改进蚁群算法的三维路径规划研究[J].传感器与微系统,2022,41(1):45-49.
LU F, LU Z Q, NIU C, et al. Research on 3D path planning based on improved ant colony algorithm[J]. Transducer and Microsystem Technologies, 2022, 41(1):45-49.
[14]魏立新,张钰锟,孙浩,等.基于改进蚁群和DWA算法的机器人动态路径规划[J].控制与决策,2022,37(9):2211-2216.
WEI L X, ZHANG Y K, SUN H, et al. Robot dynamic path planning based on improved ant colony and DWA algorithm[J]. Control and Decision, 2022, 37(9):2211-2216.
[15]LUO Q, WANG H B, ZHENG Y, et al. Research on path planning of mobile robot based on improved ant colony algorithm[J]. Neural Computing and Applications, 2019(1):1-12.
[16]李理,李鸿,单宁波.多启发因素改进蚁群算法的路径规划[J].计算机工程与应用,2019,55(5):219-225,250.
LI L, LI H, SHAN N B. Path planning based on improved ant colony algorithm with multiple inspired factor[J]. Computer Engineering and Applications, 2019, 55(5):219-225, 250.
[17]徐菱,付文浩,江文辉,等.基于16方向24邻域改进蚁群算法的移动机器人路径规划[J].控制与决策,2021,36(5):1137-1146.
XU L, FU W H, JIANG W H, et al. Mobile robots path planning based on 16-directions 24-neighborhoods improved ant colony algorithm[J]. Control and Decision, 2021, 36(5):1137-1146.
[18]朱素霞,龙翼飞,孙广路,等.基于改进蚁群算法的SDN数据中心流调度研究[J].哈尔滨理工大学学报,2022,27(1)1-7
ZHU S X, LONG Y F, SUN G L, et al. Improved ant colony algorithm for network flow scheduling in SDN data center[J]. Journal of Harbin University of Science and Technology, 2022, 27(1):1-7.
[19]劉靖.考虑低能耗和集成策略的移动机器人自主运动规划研究[D].成都:电子科技大学,2022.
LIU J. Research on autonomous motion planning for mobile robots considering low energy consumption and integrated strategy[D]. Chengdu: University of Electronic Science and Technology of China, 2022.
猜你喜欢
软件导刊(2016年11期)2016-12-22 21:30:28
电脑知识与技术(2016年28期)2016-12-21 12:21:32
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
农家科技下旬刊(2016年9期)2016-12-15 12:51:23
农业与技术(2016年19期)2016-12-12 03:04:13
科技创新与应用(2016年31期)2016-12-03 04:01:54
电脑知识与技术(2016年26期)2016-11-25 00:00:00
科技视界(2016年18期)2016-11-03 00:32:24
中国科技博览(2016年18期)2016-10-19 11:24:07
