
抚州新一代天气雷达CINRAD/SA停机故障分析和处理
2024-01-18 09:09廖恒张初江邓圣
科学与信息化 2024年1期
廖恒 张初江 邓圣
1. 南城县气象局 江西 南城 344700;2. 抚州市气象局 江西 抚州 344000
引言
抚州新一代多普勒天气雷达坐落于抚州市临川区秋溪镇园石张家村(郊外),经纬度116°15′44″ E,27°53′38″N,海拔高度71.7m,净空环境极佳,以上无遮挡。该雷达属于无人值守站,采用异地远程控制,对于雷达机务保障方面要求较高,运行期间故障较多,尤其以伺服系统停机为主,严重影响了雷达站的业务质量[1]。现就抚州新一代天气雷达报警停机出现连续问题以后故障排查、分析处理进行阐述。
1 报警名称概述
311 ELEVATION - NORMAL LIMIT,仰角负限位-正常限位;
308 ELEVATION IN DEAD LIMIT,仰角死区限位;
300 ELEVATION AMPLIFIER INHIBIT,仰角放大器禁用;
398 STANDBY FORCED BY INOP ALARM,不可操作报警系统强制待机。
1.1 故障现象
雷达多次报308、311、300、398号报警停机。
1.2 报警名称分析
308号报警,当天线的仰角低于-2.5°±0.1°或大于92.5°±0.1°时,会触发天线死限位行程开关,雷达会报警警示并停机,并禁止俯仰功率放大器继续工作,禁止为雷达天线俯仰角度转动提供电能。
311号报警,当天线的仰角低于-1.2°±0.1°时,会触发天线负电限位行程开关,出现此报警后,雷达会报警警示并停机,但允许俯仰功率放大器继续工作,允许雷达天线俯仰角度继续转动。
300号报警,当天线俯仰出现安全级别较高的报警时,出现此报警,会禁止俯仰功率放大器为俯仰电机供电,导致RDASC软件不能继续控制天线俯仰转动,此次出现300号报警是仰角死区限位报警导致。
398号报警,当出现的报警能导致雷达某个分系统不能工作,且不是信号处理类问题时,会出现此报警。
2 故障分析
2.1 据报警名称做报警分析
雷达天线俯仰硬件实际能到的角度为-4°至94°,天线俯仰在-1.2°和91.2°处设置只电限位开关,当俯仰转到这个位置时,雷达报警停机给予警示;俯仰在-2.5°和92.5°处设置了死限位开关,俯仰转到这个位置时,雷达报警停机并禁止俯仰功率放大器继续为俯仰电机供电,禁止继续为天线俯仰转动提供能量;在-4°和94°处设置机械限位,天线俯仰可能由于惯性转到这个位置,会撞到机械限位上,机械限位会消耗掉天线俯仰剩余的动能。
雷达体扫模式设定的俯仰工作角度是0.5°~19.5°,正常天线不会转到0°以下的角度。
这次出现308和311号报警,这两个报警都代表天线转到了负的角度,所以首先认为应该不是虚警,因为同时出现两个相关的虚警的概率很小,应该是天线真的转到负仰角很低的位置,天线转到这个位置,通常叫它“天线砸头”了,出现这两个报警是对雷达天线的一种保护[2]。
一般有三种情况能导致天线砸头,分别是俯仰角度闪码、其他伺服控制系统故障和天线配重不平衡。
雷达伺服系统由电流环、速度环和位置环3个环组成。俯仰角码传输线路和雷达控制终端发出的指令构成位置环,位置环接收雷达控制终端位置指令并和俯仰角码传输线路反馈的当前位置进行比较,其差值经过比例积分放大后的电压值作为位置环的输入端;俯仰放大器与俯仰电机构成速度环和电流环,速度环接收雷达控制终端速度指令并和电机的速度反馈量进行比较,其差值经过比例积分放大后作为电流给定值送到电流环的输入端。电流环把电流给定值和电流反馈值进行比较后,其差值输出到俯仰放大器,经过功率放大,输出驱动电压给俯仰电机,俯仰电机带动天线按照命令的要求转动。
俯仰角度闪码指的是反馈的俯仰角度值出现跳变,正常的角度变化是连续的且受天线最大转速限制,短时间内俯仰角度不可能出现很大的变化[3]。当俯仰角度闪码时,反馈给伺服控制系统的俯仰角度是错误的,伺服控制系统会根据错误的俯仰反馈角度及控制终端的角度命令来控制天线俯仰转动,此时位置环出错,导致天线俯仰转动异常,可能出现“天线砸头”。
其他伺服控制系统故障指的是由于伺服系统速度环和电流环故障导致的天线转动异常。
天线配重不平衡指俯仰仓前后天线端和配重端的力矩不平衡,导致天线在不通电情况下会向天线端或配重端慢慢倾斜转动,一般不会在雷达连续工作状态下出现。
此次出现300号报警是由于308号报警导致。
此次出现398号报警是由于300号报警导致。
从报警名称来看导致雷达报警停机的根本原因是308和311号报警。
2.2 日志分析
Alarm报警文件分析参考以下文件。
2023-05-17T00:12:13.989671+08:00 ALARM 311 ELEVATION - NORMAL LIMIT
2023-05- 17T00:12:14.095660+08:00 ALARM 300 ELEVATION AMPLIFIER INHIBIT
2023-05- 17T00:12:14.095698+08:00 ALARM 398 STANDBY FORCED BY INOP ALARM
2023-05- 17T00:12:14.095729+08:O0 ALARM 308 ELEVATION IN DEAD LIMIT
Error日志里记录了大量的俯仰角码校正记录。为了防止偶尔出现的角度闪码导致天线的剧烈晃动,控制终端会增加角码平滑功能,当出现的角度变化,控制终端认为不合理时,会做角度平滑处理并将处理记录在error日志文件里。比如下面第一行的意思是,接收到俯仰角码为89.17°,认为不合理做平滑处理,处理后角度为2.11°,记录在Ant文件里。
2023-05- 170012:12.745119+08:00 Ped[8218]dcu err TIME=00102a46, fix E1089.17, 3F6C to002.11, 0184
2023-05- 1700:12:12790192 +08:00 Ped[8218]dcu err TIME=00102a73, fx E| 089.17, 3F6C to 002 .90, 0214
2023-05- 1700:12:12.822941+08:00 MainA[8187]ped errel:1.32 fixed el: 0.48
2023-05- 170012:12.822971+08:00 MainA[8187]ped err el:1.32, fixed el: 0.48
2023-05- 1700:12:12.822990+08:00 MainA[8187]ped errel:2.11, exp el: 0.48
2023-05-170012:12.823011+08:00 MainA[8187]ped err el:2.90, exp el 0.48
Ant日志里记录了俯仰角度,当出现平滑处理,Ant会记录平滑后的俯仰角度。尽管增加了平滑功能,出故障时Ant记录的角度依然是不平滑的,有剧烈的波动。
2.3 视频分析
查看天线罩内监控视频记录,出故障时,天线出现剧烈的上下晃动,最终天线俯仰砸到最低处。
2.4 雷达站现场分析
故障时,看到控制终端显示的俯仰角度剧烈的上下变化,最终报警停机时俯仰角度停在-4°同时能感受到停机瞬间天线撞击机械限位时产生的楼体震动。
此时需要关电,到天线罩内手动把天线推高,雷达才能再次工作。
3 分析结论与原因查找
雷达报警停机是308和311号报警导致,308和311号报警是由于俯仰角度闪码导致。
3.1 俯仰闪码可能的原因
出现比较多的导致俯仰角度闪码的原因包括汇流环故障、俯仰光电码盘故障、俯仰轴角盒故障、上下光纤板故障、DCU数字板故障、强电干扰、电磁波泄露干扰、锁存与移位信号异常及传输电缆问题。
3.2 俯仰角度传输线路
俯仰大齿轮-俯仰同步箱-俯仰光电码盘-俯仰轴角盒-汇流环-上光纤板-下光纤板-DAU大底板-DCU数字板-雷达控制终端。
3.3 故障范围排除法缩小
故障时实测锁存与移位信号未见异常。
现场检查角码传输线缆未见异常。
断开伺服系统强电,关闭发射机的电磁波发射,手推天线做方位转动,发现俯仰角度依然闪码,排除了强电干扰及电磁波干扰。
多次控制天线做RHI转动(天线方位不转,俯仰转动),俯仰角度不闪码,说明天线可以单纯做俯仰转动。
多次控制天线做PPI转动(天线俯仰不转,方位转动),俯仰角度闪码,且闪码时有明显规律,发现当方位角度在0°至90°区间内时,俯仰角度不会出现闪码,当方位角度在90°至360°区间内时,俯仰角度会剧烈闪码,俯仰角度闪码的出现与方位角度位置高度相关。
俯仰角度的产生及传输线路与方位角度的交集并不多,交集包括俯仰光电码盘、俯仰轴角盒的供电与方位光电码盘、方位轴角盒的供电是共用的,方位角码和俯仰角码传输在上下光纤板、DCU数字板上是同一条传输线路及方位转动时会带动汇流环跟着转动。故障时测量光电码盘和轴角盒的供电是5V,供电正常;如果是上下光纤板、DCU数字板问题,正常俯仰闪码的同时方位也会闪码,因为他们共用一根传输线缆,但方位角度传输正常。
3.4 结论
根据排除法,俯仰角度闪码最可能的原因是汇流环。
4 故障处理
4.1 汇流环简介
汇流环又称滑环,其作用是使雷达方位转动时保证雷达俯仰的各种信号能正常传输。
4.2 汇流环问题通常处理办法
通常判断汇流环导致雷达工作异常后,我们首先要用酒精和纱布清理汇流环轨道和碳刷,我和台站机务人员多次清理汇流环轨道后,故障未消除。
4.3 汇流环更换
更换新的汇流环后,雷达恢复正常工作。此次更换的是免维护汇流环。
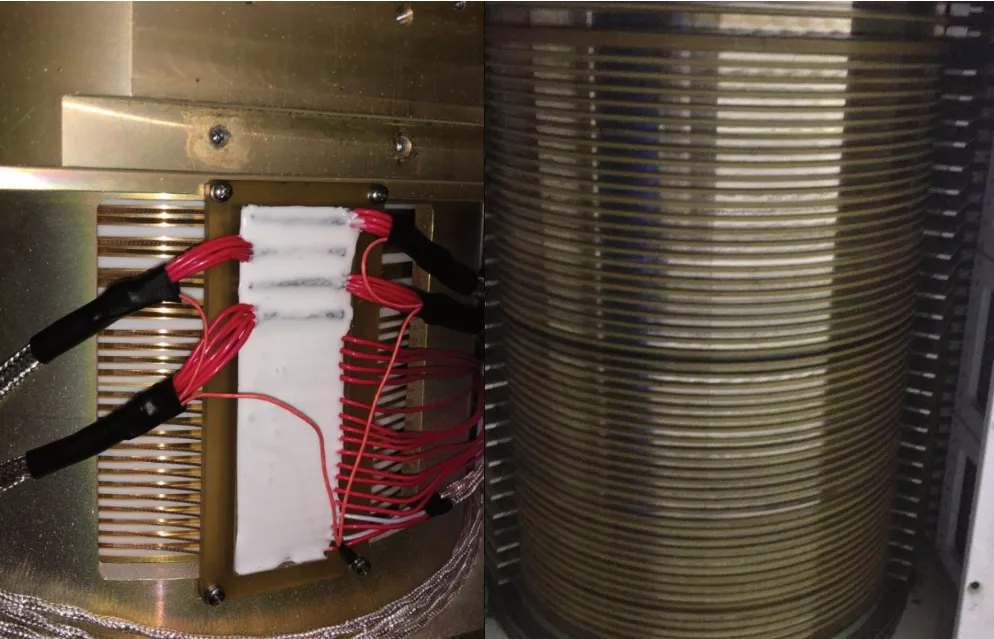
图1 更换新一代天气雷达汇流环
5 结束语
新一代天气雷达需要全天不间断的持续工作,因此汇流环的工作负荷较重,平日应加强对汇流环的内部维护,掌握一定的排故方法和处理方法,可快速排除此类故障,有助于提高雷达的业务质量。
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10
中国特种设备安全(2022年6期)2022-09-20
现代仪器与医疗(2021年4期)2021-11-05
哈尔滨轴承(2020年4期)2020-03-17
猪业科学(2018年4期)2018-05-19
水利技术监督(2017年3期)2017-06-09
汽车维护与修理(2016年3期)2016-02-28
智能建筑电气技术(2015年5期)2015-12-10
雷达与对抗(2015年3期)2015-12-09
太阳能(2015年7期)2015-04-12
