
基于目标检测与特征匹配测距的输电线路防外破监测方法*
2024-01-18 09:09佘仰腾范亮张惠荣陈奕戈张磊
科学与信息化 2024年1期
佘仰腾 范亮 张惠荣 陈奕戈 张磊
1. 广东电网有限责任公司惠州供电局 广东 惠州 516000;2. 广州中科智巡科技有限公司 广东 广州 510623
引言
塔吊、吊车、挖掘机和推土机等大型机械在输电线路下施工时,极易造成碰电线事故。近年来,基于卷积神经网络的目标检测模型逐步取代传统的目标检测算法进行输电线路外力破坏隐患检测,在提高隐患目标检测准确率的同时也提升了检测效率。然而,由于摄像头的视场范围比较宽广,目标检测模型将输电线路外远处的施工机械检测出来的误检情况经常发生。
为了排除误检情况,本文基于双目摄像机,提出一种结合目标检测与特征匹配测距的输电线路外力破坏隐患检测方法,实现自动化、高准确率、高实用性的输电线路防外破监测。
1 相关理论
1.1 YOLOv4模型
YOLOv4目标检测模型较好地兼顾了检测精度和速度,其结构由4大部分组成:主干特征提取网络CSPDarknet53网络、空间金字塔池化层SPP层、路径汇集网络PANet网络以及预测网络。
本文引入注意力机制增强隐患目标的特征表达,在CSPDarknet53网络中的CSP模块中加入CA注意力机制,将传递通道赋予不同的权重,使得在梯度计算过程中,权重较大的通道占主导地位,最终呈现在原始图像中网络能更明显的检测重点关注部分[1]。
1.2 LoFTR模型
本文采用基于深度学习的LoFTR模型进行双目图像配准,LoFTR模型直接从包含相同或相似特征内容的图像对中学习到像素级别的匹配关系,提取特征点匹配对精度较高,可以在低纹理、运动模糊的区域产生高质量的特征匹配对,对于运动中的外力破坏目标具有较好的配准效果[2]。
2 本文算法
2.1 构建改进YOLOv4模型
本文改进YOLOv4模型所引入CA注意力机制的计算流程图如下[3]。将原始输入特征分解为两个一维特征的编码过程,分别沿着长宽两个空间方向聚合特征进行全局池化,在一个空间方向建立依赖关系的同时,在另一方向捕获精准的位置特征,二者相辅相成,共同应用于特征图,以增强关注对象的表示。再将生成的attention map进行concat操作,使通道叠加,在经过卷积及非线性函数变换,为空间信息各自在长宽方向进行编码的中间特征映射,将得到的新特征按照H和W的值拆分,在经过激活函数与最原始的输入相乘,得到最终的注意力特征图[4]。
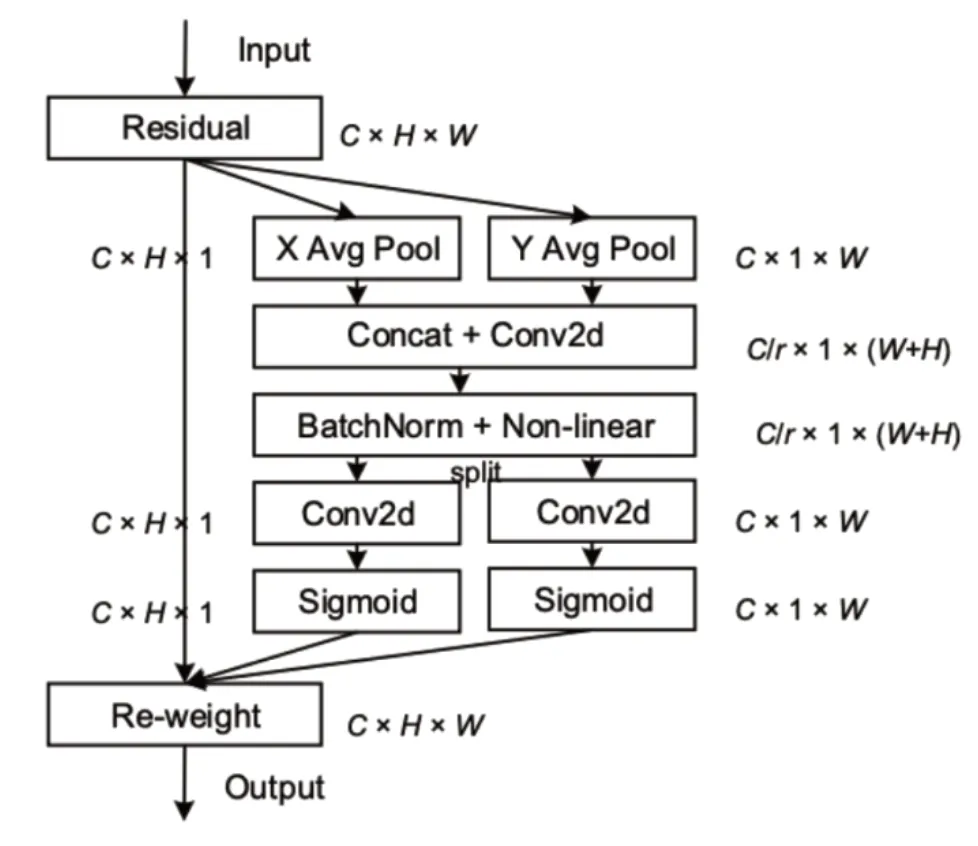
图1 引入CA注意力机制的计算流程图
在PANet中对主干特征网络输出的最后第2层、最后第3层以及SPP层输出的特征图进行融合,对于输入的融合特征图,预测网络首先将特征图划分为S×S个网格,每个网格负责预测中心落入该网络的对象是否是外力破坏隐患,并计算3个预测框。每个预测框对应5+C个值,C代表待检测外力破坏隐患的种类数目,5表示预测框的信息,分别是:中心点坐标(x,y),框的宽和高以及置信度。最后使用非极大值抑制算法来筛选出置信度得分较高的隐患目标预测框作为最终的检测结果进行输出,获取隐患目标区域的最大外界矩形框。
2.2 双目相机参数调整
摄像机镜头拍摄的图像会存在畸变现象,因此在测距之前需要对左右图像进行校正。依据双目摄像机已标定好的参数对左右图像进行畸变及立体校正,获取对准的双目图像[5]。
为了获取摄像机的畸变系数以及焦距和基线距等基础参数,本文利用张正友标定法对摄像机进行标定。首先以棋盘格为标定参照物,使用双目摄像机拍摄多张不同角度的图像。再利用Matlab软件中camera calibration工具箱将拍摄的多张图像通过提取角点、预估畸变误差等操作对左右摄像头分别进行单目标标定,得到左右摄像头的畸变系数和内部参数。最后使用stereo camera calibrator工具箱将误差较大图像移除后重新计算,对外部参数进行标定。
2.3 LoFTR模型对双目图像进行图像配准
采用LoFTR模型对双目图像进行图像配准,根据图像中的隐患目标区域范围,提取范围内的特征匹配对[6]。
2.3.1 采用LoFTR模型进行双目图像配准。双目图像输入LoFTR模型后生成N个特征匹配对{(x,y)∈Ili,(x,y)∈Iri|i=1,2,3...N},其中(x,y)∈Ili是左图像中的特征匹配像素点坐标,(x,y)∈Iri是右图像中的特征匹配像素点坐标,i为特征匹配对的序号。
2.3.2 提取隐患目标区域范围内的特征匹配对。以左图像作为基准图像,根据左图像中的隐患目标区域范围,筛选出预测框内的左图特征匹配像素点坐标,并通过序号i获取右图中对应的特征匹配像素点坐标,即可提取隐患目标区域范围内的特征匹配对。
2.4 外力破坏隐患实际距离的测量
双目摄像机测距原理如下图所示,摄像机的基线b和焦距f可在摄像机标定过程中获取,图像中的像素差X可通过所提取若干特征匹配对横坐标的距离均值获取,最终实际距离z可用公式表示为:
2.5 目标跟踪
引入deepsort算法对出现在做图像画面中的外力破坏隐患目标进行目标跟踪[7],记录每一个目标的停留帧数,联合目标实际距离进行综合的告警判断。
2.5.1 采用deepsort算法进行隐患目标跟踪。deepsort算法采用通过引入检测目标的外观信息,对浅层残差网络提取的128维特征向量进行关联,计算特征向量与检测框的最小余弦距离,实现状态匹配。将目标检测获得的检测框与卡尔曼滤波器获得的预测框匹配后,通过对各目标标记ID来确定身份,实现目标跟踪。
2.5.2 结合目标距离和停留帧数进行告警判断。当隐患目标通过计算得到的实际距离大于预设阈值时将其视为无关目标,而当实际距离小于预设阈值时,则通过deepsort算法实时统计该隐患目标的停留帧数[8],若该隐患目标在输电线路监控区域中的停留时间较短(停留帧数小于等于90),则进行低风险告警,提醒工作人员有隐患目标进入现场;若该隐患目标在输电线路监控区域中的停留较长(停留帧数大于90),进行高风险告警,表明该目标有长时间停留的趋势。
3 实验过程与结果分析
3.1 机械设备模拟进入监测区域
采用模拟输电线路施工机械进入监测场景的方法进行算法和设备的验证。
3.2 实验环境与配置
采用设备参数如下:CPU,主频2.40GHz,8C/16T;显卡,NVIDIA Geforce 3070ti;操作系统,Redhat Centos 9.2207。
3.3 算法训练与结果测试

表1 算法实验结果
3.4 结果分析
通过分析比较,双面摄像头搭配算法的模型能够有效监测现场是否存在施工机械,并且根据距离预警输出,对较远距离的模拟测试过程发现,测距精度相应损失较大,在300m范围的精度完全满足现场实际应用的需要。
4 结束语
本文提出的结合目标检测模型、基于特征匹配模型的双目测距技术和目标跟踪算法实现自动化、高准确率、高实用性的输电线路防外破监测。目标检测模型以YOLOv4模型为基准模型,引入CA注意力机制增强隐患目标的特征表达,提高模型对外力破坏隐患目标的检测精度。采用LoFTR模型进行双目图像配准,获取左右图像中隐患目标更准确的像素差,从而使计算得到目标距离的更加精准。通过deepsort算法实时统计隐患目标的停留帧数,结合隐患目标的实际距离和停留时长进行告警判断,提高防外破监测方法的实用性。
猜你喜欢
江苏安全生产(2022年9期)2022-11-02
江苏安全生产(2022年8期)2022-11-01
大众科学(2022年8期)2022-08-26
江苏安全生产(2022年6期)2022-07-29
电子制作(2019年20期)2019-12-04
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
现代计算机(2016年11期)2016-02-28
新闻前哨(2015年2期)2015-03-11
机械与电子(2014年2期)2014-02-28
