基于多层感知机技术的地铁盾构施工参数预测
2024-01-17 11:50李文乾吴云桓吴兢业陈治怀谢森林胡安峰
深圳大学学报(理工版) 2024年1期
李文乾, 吴云桓, 吴兢业, 陈治怀, 谢森林, , 胡安峰,
1)中铁十局集团城市轨道交通集团有限公司,广东广州 511402;2)浙江大学建筑工程学院,浙江杭州 310058;3)滨海和城市岩土工程研究中心,浙江杭州 310058
随着中国城市化的快速进行,城市地面交通越来越拥堵,为缓解该情况,城市交通建设的重点目前正逐步转向地下空间[1-5].盾构法具有对周围环境扰动小、施工时不影响地面交通等优势,在地铁建设中得到了广泛应用[6-8].然而,地铁施工常面临水文地质条件复杂和地下管线通道密集等诸多方面的挑战,隧道掘进的安全控制对盾构机驾驶员经验提出了较高要求[9-11].因此,建立有效的盾构掘进施工参数预测模型具有重要的应用价值[12-13].
目前针对隧道掘进参数的研究已有较多成果.夏毅敏等[14]采用数理统计的方法探究了硅质岩地层和糜棱岩地层等不同地层条件下刀盘转速、总推力与推进速度的相关性,为隧道掘进提供了合理参考.郑刚等[15]通过盾构机掘进参数对地表沉降影响敏感度的分析,得出各个掘进参数导致地表沉降的风险大小.张厚美[16]编制了全断面隧道掘进机(tunnel boring machine, TBM)掘进性能的数值计算程序,可对刀盘扭矩和推力等参数进行计算.邱明明等[17]借助数值仿真建立了三维盾构施工有限差分计算模型,给出了盾构施工引起的地层变形三维地层损失预测方法,并对盾构施工地层竖向变形及水平变形计算结果进行对比分析.宋洋等[18]通过开展室内相似试验对现场盾构下穿前的掘进参数进行优化研究,发现掘进参数在全断面泥岩地层中波动范围较大,其中刀盘扭矩和总推力尤为明显.袁炳祥等[19-20]结合粒子图像测速仪(particle image velocimetry, PIV)技术开展了室内模型试验,研究了土层厚度及相对密实度对土-结构复杂相互作用的影响.李超等[21]基于深圳地铁11 号线两个区间工程的数据,构建了可以在复合地层情况下预测掘进参数的神经网络.杨全亮[22]采用反向传播(back propagation, BP)神经网络以及径向基函数(radial basis function, RBF)神经网络分析掘进参数的变化规律、搭建模型后,发现两者精确度均较高,也可以互为补充.
上述有关隧道掘进参数的研究大多采用数值模拟与室内模型试验方法,无法真实还原地质条件复杂的现场隧道掘进条件,部分掘进参数研究中使用的神经网络模型架构也较为简单,软土条件下针对隧道掘进参数智能预测的研究还未见报道.深度学习网络具有强大的自适应学习能力和非线性映射能力,能解决传统机器学习或优化算法在处理模糊、不确定信息问题中的预测效果差和迭代速度慢等弊端,因此在地下工程中得到了大量的应用[23-24].鉴于此,本研究以杭州机场轨道快线某标段为工程背景,利用深度学习领域多层感知机技术建立盾构掘进参数预测模型,并对超参数组合进行优化,在已知地层条件的情况下对盾构施工掘进参数进行预测,并对预测结果进行分析验证.
1 多层感知机模型计算原理
一般来说,深度学习的训练需要十万乃至百万级别以上的数据量,数据维度也更加多元.针对有限的隧道掘进实测数据样本,使用特征提取能力强大的深层神经网络会出现过拟合的现象. 因此,本研究选用如图1所示的多层感知机网络建立盾构施工掘进参数预测模型.其中,x1、x2、x3和x4均为输入多层感知机的原始数据.

图1 多层感知机结构示意图Fig.1 Schematic diagram of multi-layer perceptron structure.
BP算法是适用于多层感知机的一种学习算法.图2 为反向传播算法示意图.其中,第1 层是输入层,含有2 个神经元i1、i2和偏置b1;第2 层是隐藏层,含有2个神经元h1、h2和偏置b2;第3层是输出层,含2 个神经元y1和y2,wi(i= 1, 2, …, 8)是层与层之间的权重,以修正线性单元 (rectified linear unit, ReLu) 为激活函数.

图2 反向传播算法示意图Fig.2 Schematic diagram of back propagation.
1)数据流的正向传播. 神经元h1的输入加权和sh1为
神经元h1的输出为
隐藏层其他神经元及输出层神经元计算同理.
2)误差信息的反向传播. 输出总误差为
其中,Ei为第i个输出单元的预测误差;为第i个输出单元的预测值;yi为第i个输出单元;n为输出层神经元数量.
以w5为例,对隐藏层至输出层的权值进行更新.w5对整体误差的影响为
其中,sy1为yi的输入加权和.对w5的权值进行更新为
其中,η是学习速率.
以w1为例,对输入层至隐藏层之间的权值进行更新.
以上是反向传播算法的计算思路.权重经过更新后以新的权重计算,不断迭代,直至误差下降至允许范围.
2 盾构掘进参数预测模型
2.1 工程介绍
杭州机场轨道快线某标段为单圆盾构区间,区间起止为K26+811.147~K29+649.311,区间总长为2 838.184 m,设置3.985 m的短链,隧道间距为11.0~17.2 m,埋深为13.87~32.83 m,建立4 座联络通道.该施工段土层环境复杂,各土层主要土质为:① 灰黄色和褐黄色黏土;② 灰黄色和褐黄色粉质黏土夹粉土;③ 灰色淤泥质粉质黏土;④褐黄色粉质黏土;⑤ 褐黄色粉质黏土夹粉土.隧道直径范围内土层的物理力学参数见表1,隧道与土层的位置关系可扫描论文末页右下角二维码,查看补充材料图S1.
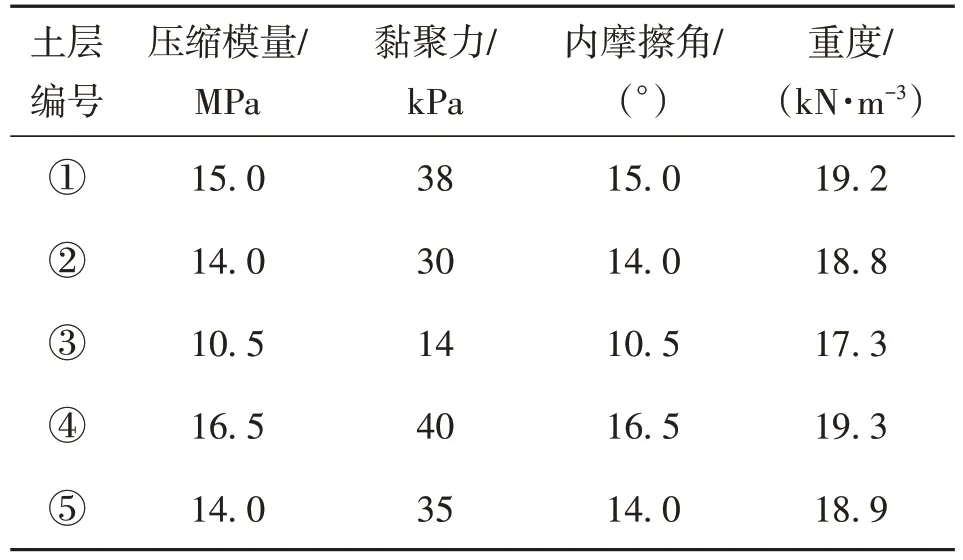
表1 土层的物理力学参数Table 1 Physical and mechanical parameters of soil layer
2.2 数据预处理
项目盾构掘进参数的原始台账共1 361 个数据样本,其中包含有14 个特征.从参数重要性程度及提高模型性能的角度出发,筛选其中相关程度较高的7 个特征(刀盘转速、推进速度、注浆量、注浆压力、出土量、总推力和刀盘扭矩).结合土层占比和地基土物理力学性质,插值得到区间隧道直径范围内土层的摩擦角、黏聚力、压缩模量和重度4个特征.模型输入参数为顶部埋深、摩擦角、黏聚力、压缩模量、重度、刀盘转速和推进速度等7个特征.其中,隧道顶部埋深、摩擦角、黏聚力、压缩模量、重度反映地层和隧道几何特征等外部因素随地质条件与隧道选线方案的不同而变化.需特别指出的是,由于在全长范围内均不改变,隧道几何特征中的隧道直径和厚度未作为本模型的输入参数.刀盘转速和推进速度为反映了人为操作的外部因素,主要由盾构司机根据施工计划及进度确定.模型输出参数为注浆量、注浆压力、出土量、总推力和刀盘扭矩等.训练集输出参数的频率分布如图3.由图3 可见,除出土量外,数据集样本变化范围均较大,且数据集中程度较为明显,这主要是因为影响盾构机实际施工参数的因素较多,而盾构机司机偏向于使用经验判断操作参数,因而各项施工参数均表现出了一定的集中性.本研究所选用的数据集分布特征符合真实情况.
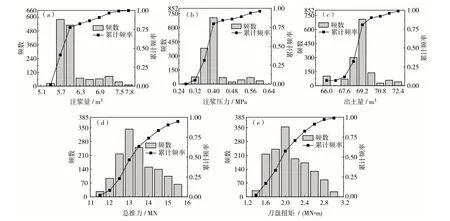
图3 训练集输出参数频率分布直方图 (a)注浆量; (b)注浆压力; (c)出土量; (d)总推力; (e)刀盘扭矩Fig.3 Histogram of frequency distribution of training set output parameters. (a) Slurry volume, (b) slurry pressure, (c) soil discharge volume, (d) total thrust force, and (e) blade torque.
由于上述12个特征的数据取值范围差异较大,直接在原始数据上训练模型一般会使得模型效果不佳,因此在数据输入神经网络之前需要进行预处理,以满足网络对于取值范围的要求,提高模型性能.本研究中不同地区土层性质有较大的差别,样本数据也会有较大变化,为保证数据集的分布特征,采用标准化的方法进行特征缩放,即
其中,X为原始参数;μ和σ分别为X的样本均值与方差;X*为缩放后的各特征数值.
2.3 模型训练与评估方式
为避免信息泄露而造成不真实的预测效果,需要在一些数据被用于训练模型的同时,留出一定比例的数据作为测试集用于最后模型的评估,还需要保留验证集对初步训练进行验证.此外,在可用数据较少的情况下,模型的验证分数将会随着数据集划分比例而有较大波动,无法对模型进行可靠的评估.为此,本研究采取K折验证的方法对数据进行充分利用.该方法的原理是实例化K个相同模型,将每个模型在K -1 个训练集分区上训练,并在剩余的1个验证集数据上进行评估,模型的验证分数等于K个验证分数的平均值[25].图4是本研究模型的训练、验证与测试过程的示意,K取为10.

图4 留出法与K折交叉验证示意图 (K = 10)Fig.4 Schematic diagram of cross validation between reserve method and K-fold (K = 10).
在建立多层感知机神经网络时,为了防止过拟合现象的发生,需要留出一定比例的数据集作为测试集来评估训练模型的泛化效果,剩下的数据集分成训练集与验证集,在训练集上训练确定模型的权重与偏置参数,用验证集来评估在训练集上初步得到的模型性能.本研究用于模型训练的样本量为1 300,测试集数据样本量为61,训练集与验证集的数量比为9∶1,训练集、验证集和测试集的数量比为1 170∶130∶61.需指出的是,测试集样本对应的衬砌环与训练模型使用的样本衬砌环在纵向上不连续,以确保模型在测试集上的预测效果真实反映网络的泛化能力.
为增加数据的多样性,减小数据集数据过少造成评价指标波动的影响,模型训练时采用K折交叉验证.将原始训练数据平均分成K份,每次取其中1份作为验证集,剩余的K -1份作为训练集,K次训练的平均误差作为某超参数组合条件下的模型泛化误差.
2.4 多层感知机模型
2.4.1 网络结构
为得到最佳性能表现的多层感知机预测模型,考虑如表2所示的超参数变化范围并采用完全组合的方式进行对比,共81 种情况.为减小梯度消失及加快网络训练速度,激活函数选取ReLu,权重及偏置初始化分别采用默认“random_uniform”和“zeros”方式.为保证获得潜在的最佳模型起始权重参数,不特别指定权重初始化随机种子.
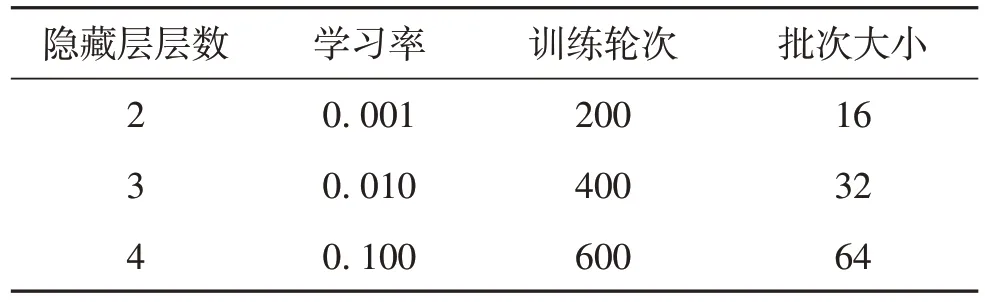
表2 多层感知机超参数选择Table 2 Hyper-parameter selection of multi-layer perception machine
2.4.2 最佳超参数组合选取
最佳模型超参数定义为在验证集上误差最小的一组模型超参数,该误差以平均绝对误差(mean absolute error, MAE)表示,计算式为
图5为不同隐藏层层数和学习率的模型在验证集数据上的表现.其中,横坐标4组数字的含义为超参数组合,依次为隐藏层层数、训练轮次、批次和学习率;数据点表示在该组隐藏层层数和学习率条件下,具有最佳验证集预测表现的模型EMA值,该误差为5 个输出参数误差的平均值.从图5 可以看出,各模型最小预测误差并不一致,随隐藏层层数和学习率的变化而变化,具有最小验证集误差的超参数组合为:隐藏层层数为3 层,训练轮数为200 轮,批次大小为64,学习率为0.001,记为3-200-64-0.001.
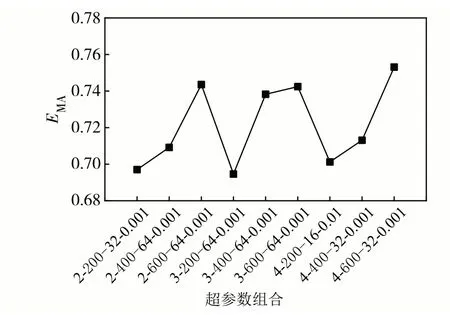
图5 选择最佳超参数组合Fig.5 Selection of the optimal hyper-parameter combination.
2.4.3 模型训练过程误差
图6为最佳超参数组合下多层感知机模型在训练过程中的平均绝对误差,该误差为K折交叉验证下的平均验证集误差.从图6可见,随着训练轮次的增加,模型的预测值与真实值之间的误差迅速减小并逐渐收敛至0.7左右,且训练过程中未出现过拟合现象,确保了模型的泛化能力.此外,由表2可知,最大训练轮次可达600,而最佳模型仅需200 次训练即获得了最小的误差,说明训练轮次并非越多越好,最佳的训练轮次应通过分析数据量、训练时长和拟合情况初步确定,并通过验证集误差最终确定.
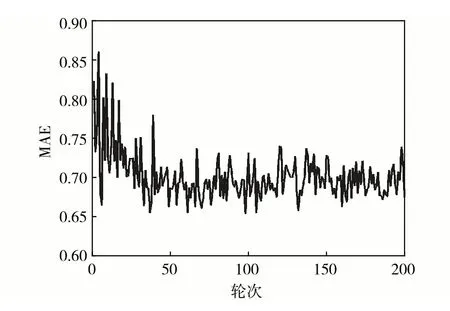
图6 最佳模型在训练过程中的平均绝对误差Fig.6 Average absolute error of the best model in the training process.
3 掘进参数预测分析
使用前文多层感知机模型对盾构隧道线路1 300~1 362环的掘进数据进行预测,预测表现可扫描论文末页右下角二维码,查看补充材料图S2.由图S2 可见,本研究建立的多层感知机模型对注浆量、注浆压力、出土量、总推力和刀盘扭矩的预测效果较好,预测值与真实值之间的相对误差分别为1.85%、19.61%、0.77%、10.09%和13.03%,误差均在20%以内.表3 为随机取出的测试集中5环管片盾构掘进参数预测值与真实值之间的对比.由表3 可见,模型对各施工参数的预测效果较好.本研究模型具有较高的预测精度,可用于复合地层条件下同类型盾构掘进参数的预测.
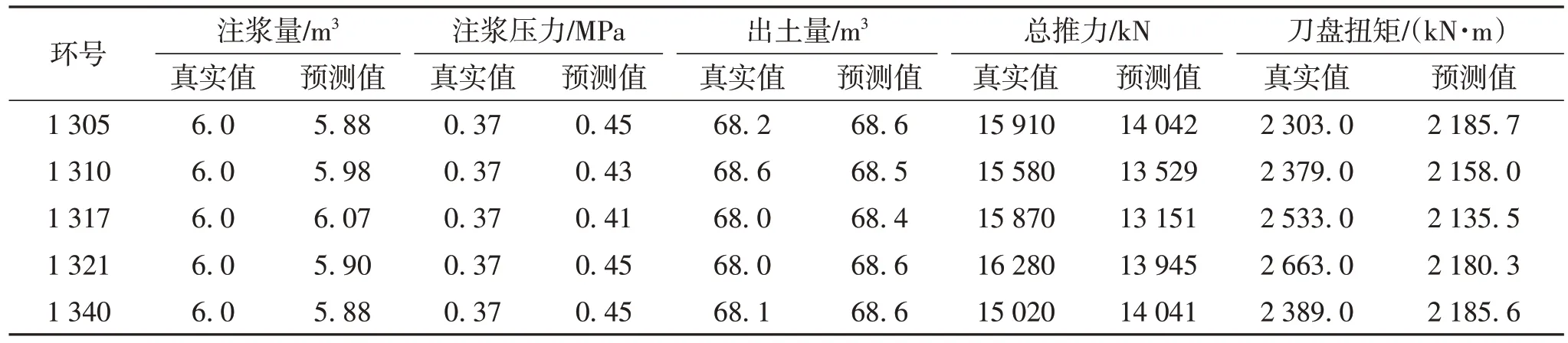
表3 盾构掘进参数预测值与真实值对比Table 3 Comparison between predicted and true values of shield tunneling parameters
4 结 论
依托杭州机场轨道快线某标段的盾构施工项目,构建了基于深度学习领域多层感知机技术的盾构掘进参数预测模型,可知:
1)选用隧道顶部埋深、摩擦角、黏聚力、压缩模量、重度、刀盘转速和推进速度等7个特征作为模型输入参数,不断调整模型超参数可以实现注浆量、注浆压力、出土量、总推力和刀盘扭矩等5个盾构掘进参数的准确预测.在7 项输入参数中,隧道顶部埋深、摩擦角、黏聚力、压缩模量、重度代表地层和隧道几何特征等外部因素,刀盘转速和推进速度代表人为操作的外部因素.
2)超参数不同,多层感知机模型的预测性能也不同.为得到具有最佳预测表现的模型,需要不断改变超参数组合并训练模型.同时,为获得潜在的最佳模型起始权重参数,不应指定权重初始化随机种子.
3)使用本研究模型对注浆量、注浆压力、出土量、总推力和刀盘扭矩进行预测,得到结果的平均误差分别为1.85%、19.61%、0.77%、10.09%和13.03%,总体上具有较高的精度,可用于复合地层条件下类似工程盾构掘进参数的预测.
猜你喜欢
机械工程师(2023年11期)2023-12-09
建材发展导向(2019年11期)2019-08-24
江西建材(2018年4期)2018-04-10
隧道建设(中英文)(2017年10期)2017-11-07
浙江大学学报(工学版)(2016年11期)2016-06-05
中国煤炭(2016年1期)2016-05-17
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
江西煤炭科技(2015年2期)2015-11-07
中国质量与标准导报(2014年7期)2014-02-28