无人机控制技术发展的专利分析
2024-01-16 10:17许庆婷
河南科技 2023年23期
许庆婷 周 香
(国家知识产权局专利局专利审查协作江苏中心,江苏 苏州 215000)
0 引言
本研究对无人机控制技术相关的国内外的专利申请数量和重要申请人、专利申请趋势、专利分布情况等进行了分析。通过分析无人机专利技术的重要技术分支:飞行中的规划与重规划、算法控制及自主导航控制[1-2],提出了无人机领域目前值得注意的问题及未来发展趋势[3]。
1 无人机控制专利申请趋势
1.1 中国专利申请情况
本节以中文专利库CNABS的检索结果为分析样本,对中国专利申请状况的趋势及专利重要申请人进行分析,了解国内该技术的发展趋势和技术重点。
1.1.1 专利申请趋势。中国专利申请势图1所示。由图1 可知,专利申请主要分为以下三个阶段。
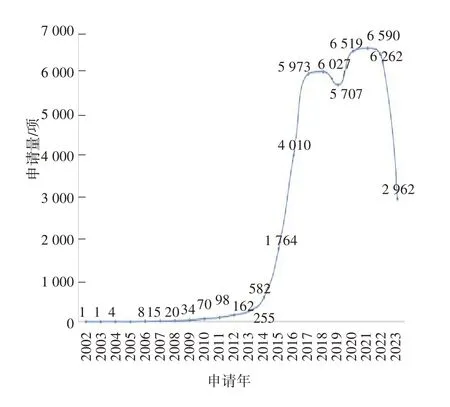
图1 专利申请趋势
萌芽期(2009 年以前)。我国对于无人机控制技术的研发相比于外国起步比较晚,2002年之前没有专利申请。直到2009 年,相关专利也很少,处于萌芽期。
平稳发展期(2009—2013 年)。在此阶段,技术发展得到了一定提升,整体技术处于平稳发展期。该阶段无人机控制技术逐渐被人们所重视,相关研究也在逐渐增多,无人机的应用需求正在增加。
快速增长期(2014 年至今)。2014 年各大企业开始了无人机控制技术的专利布局,使得其专利申请量在2014—2017 年完成了“爆炸性”的翻番,而在2017 年增长趋势稍有减缓。截至目前,无人机的专利技术申请仍在稳步增长(2023年的专利申请由于公开时间滞后,数据不完整)。
1.1.2 专利申请人分析。本节从国内专利申请的申请人角度对该领域的专利申请做进一步分析,主要考虑申请人的地域分布、根据申请数量对国内重要申请人分析。
①申请人地域分布。我国专利申请人地域分布如图2 所示,广东、北京、江苏位列前三,四川、湖北、浙江紧随其后,其他省市、地区的申请量较少,仍有较大发展空间。从主申请人的地域分布情况看,广东的专利申请企业多数是深圳的科技创新型企业。位于江苏和北京的专利申请量分别位列第二和第三,主要是江苏和北京的科研院所、高校较多,科研力量较为集中。
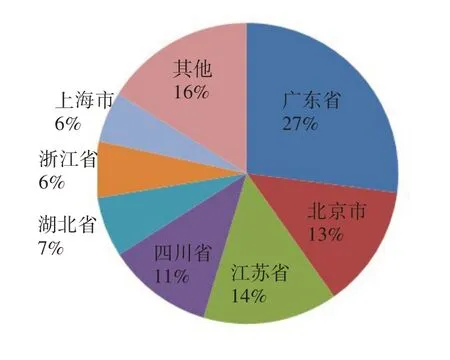
图2 专利申请人地域分布
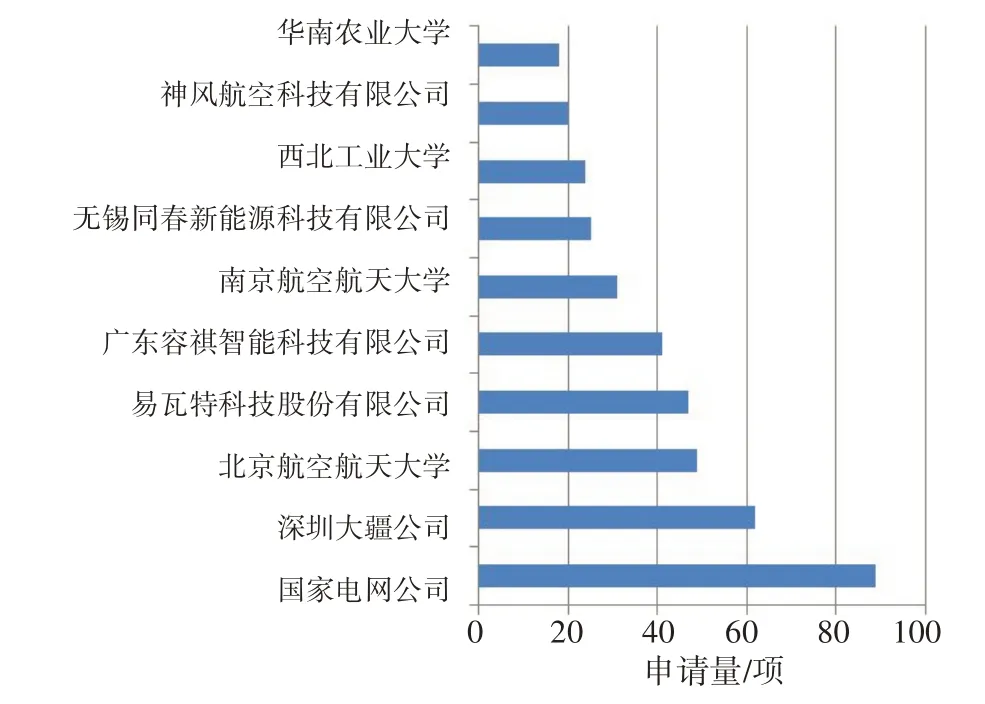
图3 专利申请主要申请人
②主要申请人分析。国内专利主要申请人如图2 所示,包括国家电网、深圳大疆公司和北京航空航天大学,还有新兴企业,例如湖北易瓦特科技股份有限公司。高等院校是无人机技术发展专利申请的重要来源,申请量进入前10 的高校有:华南农业大学、西北工业大学、南京航空航天大学、北京航空航天大学。其中,北京航空航天大学是申请量最多的高等院校,该校长期从事无人机技术研究,申请内容涵盖多个技术分支,包括无人机自主控制、驾驶航空器设计、智能信息处理、导航制导、太阳能电池等,显示出在无人机领域较强的专利布局意识。南京航空航天大学的专利申请数量在高等院校中位列第二,且专业领域较为全面,主要有无人机避障、空中加油、着陆引导等,从申请领域来看,该校更为偏重研发无人机的应用技术。
1.2 国外专利申请情况
本节以外文专利库DWPI 中的检索结果为分析样本,主要对国外的专利申请状况的趋势和重要申请人进行分析,从中得到国外的专利申请的技术发展趋势,以及各阶段专利申请人所属的国家分布和主要申请人等情况。
1.2.1 专利申请趋势。 国外专利申请趋势如图4所示,由图4可知,专利申请主要分为以下三个阶段。
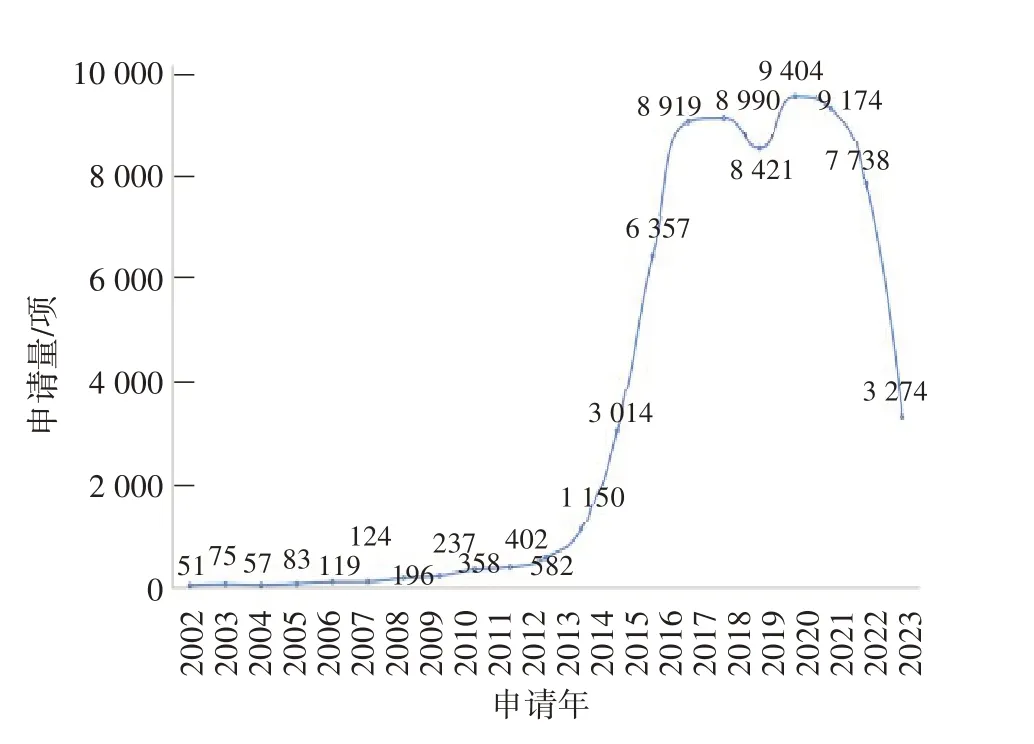
图4 专利申请趋势
萌芽期(2003 年以前)。国外对于无人机控制技术的研发比较早,早在1986 年就已经有关于无人机控制技术的专利,但是此阶段发展速度持续维持在较低水平,且无来华申请。
平稳发展期(2003—2010 年)。技术发展呈稳步上升,整体技术处于平稳发展期,且各年申请量呈现波动状态,未形成规模效应。这是由于美国等国家早期对无人机技术的研发主要基于军事需求,成果往往会进行国防保密处理,而不以专利形式公开。
快速增长期(2013 年至今)。2013 年至今,全球专利申请量开始激增,进入快速增长期,尤其是在2015—2017 年,专利申请量呈现新的高峰,这表明在科技发展的需要下,无人机的研制投入和采购需求呈现爆发性增长。同时,随着知识产权对外合作,来华申请数量增加,国外企业对在我国的知识产权保护越发重视。随着无人机技术的不断发展和市场需求的不断扩大,无人机领域的专利申请会持续性增长(2023 年的专利申请,由于公开时间滞后,收据不完整)。
1.2.2 专利申请区域分布情况。国外专利申请国别分布如图5 所示。从专利技术的国家/地区来源来看,美国申请的专利数量最多,占比约为56%;其次是日本和欧洲,专利申请的份额分别为16%和14%,位列第二和第三。美国在无人机领域的研发起步较早,在无人机控制方面的研究稳步发展,位于世界领先水平。因更注重底层技术的研发和应用,美国的专利被引率与其他国家的专利被引率相比,具有明显优势。

图5 国外专利申请国别分布
1.2.3 重要申请人分析。本节对国外专利申请的重要申请人作分析,这里将中国的深圳大疆创新科技公司也一并分析,以更直观显示中国企业在全球范围内的竞争力。虽然申请量并非衡量申请人重要性的唯一尺度,但申请量的多少基本反映了该申请人在这一技术领域的研发投入,因此,从申请量来分析重要申请人是比较客观的。全球专利申请量排名前8名的申请人如图6所示。排名第一的是深圳大疆创新科技有限公司,深圳大疆创新科技有限公司自2006 年成立以来,在创新及专利技术的开发方面迅速发展。根据市场调查数据显示,大疆产品占据了全球民用小型无人机约70%的市场份额,销售市场主要集中在欧美国家,并占据其过去总销售额的80%。大疆的主力产品据多是在2013 年以后推出的,但在此之前已有专利申请,可谓是产品未动,专利先行。

图6 全球专利申请量排名前8名的申请人
其他主要申请人大部分为美国企业,包括排名第二的波音公司,该公司较为注重无人机控制系统的研究。霍尼韦尔和IBM 公司的申请量也较大,研究主要集中在导航系统的开发。
2 国内外技术发展路线
无人机自主控制系统能模仿人类智能感觉、思维、行动的规律,主动处理无人机对象所面临的高度复杂的状况。下文主要分析飞行中的规划与重规划、算法控制及自主导航控制的技术改进等技术路线。
2.1 飞行中规划与重规划的改进
飞行态势是实时变化的,系统根据监测到的态势变化,经过信号处理、计算、分析形成调度指令,下发给无人机控制器,从而实时规划或调整飞行轨迹,控制飞机精确跟踪所生成的轨迹,完成规定的任务。2000 年的专利申请DE19849857A1 公开了一种在无线电信号丢失时,无人机自动计算路径的方法;2003 年的专利申请EP1462898A2 公开了一种在紧急状态下路径的路径重规划方法;2008年的专利申请CN101251385A 公开了一种应用在无人机上的航点实时装订与处理方法;2011年的专利申请CN102122173A 公开了一种基于SAR 雷达成像的无人机航线规划方法;2017 年的专利申请CN107077143 A 公开了一种根据虚拟围墙调整飞行线路避障的方法。
2.2 控制算法的改进
常规的无人机控制方法和早期的对无人机控制都是建立在线性飞行控制理论上的,后又出现遗传算法、神经网络等控制方法。2010年的专利申请US2011/0196540A1公开了一种PID 控制算法;2012年的专利申请CN102945046A 自主控制模式中的内环控制采用自适应鲁棒控制算法,外环控制采用模糊PID 控制算法;2013 年的专利申请CN1033835 71A 设计了一种模糊控制规则,运用模糊推理,实现对PID 参数在不同飞行工况下的最佳调整;2014年的专利申请CN103412488A 公开了一种基于自适应神经网络的小型无人旋翼机高精度控制方法;2016 年的专利申请CN106200662A 公开了一种利用自适应遗传算法实现自主飞行控制。
2.3 导航技术的改进
无人机无法进行人工驾驶,因此自主导航功能是无人机飞行控制系统的主要功能。对于导航系统而言,诸多的导航技术诸如无线电导航、天文导航、惯性导航等都已广泛应用。1997年的专利申请US6056237A 公开了一种通过GPS 导航的方法;2008 年的专利申请CN101332872A 公开了一种空中无人机通过无线电接收机进行导航的方法,惯性组件能够不依靠外部设备而独立地提供无人机的空间坐标,因此实现了真正意义上的自主导航。惯性导航最早于1954 年在飞机上试验成功,但是应用于无人机自主控制的惯性导航在2006 年才有专利申请了优先权为2006 年的专利申请US2008114544 A1 公开了一种通过惯性导航的方法。中国于2007 年申请了惯性导航的方法,专利申请CN101270993A 公开了一种以捷联惯性导航系统为主导航系统的定位方法;2009年的专利申请CN101598556A 公开了一种未知环境下无人机视觉/惯性组合导航方法。
3 结论与展望
我国对无人机系统自主控制技术的研究起步较晚,以下问题值得注意。
①加强自主控制的研究。该研究处于起步阶段,有些概念、结构还有待进一步系统化、准确化,尤其多平台的自主控制能力并不强。应紧跟国际无人机的发展趋势,充分吸取新技术、新概念,在此基础上结合我国特点进行创新,不断缩小差距。
②注重系统应用研究。2000 年之前无人机主要用于军事,2000年之后无人机在民用领域不断扩大。未来,无人机将更好的方便人们生活,如用于紧急救援、复杂环境的勘探、投送快递等,应注重不同应用领域的系统的适应性,提高无人机系统适用性。
③提高飞行的可靠性。在飞行的过程中可能会遇到突发状况,通过系统仿真试验,对无人机系统飞行控制情况检验,为控制参数的调整和优化提供准确的数据。需进一步提高仿真试验的技术水平以提高无人机的飞行安全性能。
④增加无人机的续航能力。电池的续航能力是影响无人机工作的重要因素,如何提高续航里程、提高电池的工作效能、减少耗能值得研究。同时,无人机在空中无线充电可以减少返程充电次数,提高工作效率,也是值得研究的方向。
猜你喜欢
北京测绘(2023年1期)2023-02-23
汽车观察(2022年12期)2023-01-17
粮食与饲料工业(2022年2期)2022-04-27
计算机应用文摘·触控(2021年20期)2021-11-11
留学(2019年12期)2019-07-29
领导决策信息(2018年9期)2018-05-24
焦点(2018年10期)2018-01-28
中国知识产权(2017年10期)2017-10-31
化学分析计量(2016年4期)2016-03-14
化学分析计量(2016年1期)2016-03-14