基于FBG 柔性传感器的人体姿势识别
2024-01-15 09:48:12王彦汪俊亮朱伟徐浩雨蒋超
光子学报 2023年12期
王彦,汪俊亮,朱伟,徐浩雨,蒋超
(安徽工业大学 电气信息与工程学院,马鞍山 243032)
0 引言
人体姿势作为人类传递信息的一种方式,其识别技术广泛应用于生物医学和运动学领域,不同的人体姿势可能表达人体当前的不同状态和需求[1-2]。目前人体姿势识别方法大致可分为基于视觉技术和基于传感器技术。MOUSSE M A 等[3]基于视觉技术提出了多视图特征,对人体边界体积的估计识别出坐、站、卧、走等姿势。但是视觉技术通过摄像机提取图像易受光照和背景干扰影响,在复杂条件下识别精度和鲁棒性不理想,并且出于个人隐私考虑,采集图像需被观察对象的同意。周丙涛等[4]采用带8 个柔性薄膜压力传感器的鞋垫,收集1 组正确蹲姿和4 组错误蹲姿数据,分析压力云图,提出数据分割算法并结合引入注意力机制的长短期记忆网络(Long Short-Term Memory,LSTM),证明了该方法能够有效检测错误蹲姿。卢海洋等[5]将柔性触觉传感器用于呼吸和脉搏等生理检测,并结合随机森林算法识别站立、慢跑和快跑三种姿势,识别准确率达到98.44%。电容式[6]、压阻式[7]和应变式[8]等传感器不存在侵犯隐私问题,但布线复杂、易受电磁干扰,难以满足人体姿势识别领域轻结构、抗电磁干扰的场合。
光纤布拉格光栅(Fiber Bragg Grating,FBG)传感器具有体积小、重量轻、抗电磁干扰等优点[9],且其独有的波分复用特性,易于分布式测量,广泛应用于结构健康检测、医疗监测、智能可穿戴技术等领域。隋丹丹等[10]设计了一种面向接触力检测的柔性光纤压力传感器,提出了4 种不同的增敏结构,得到光纤压力灵敏度最好的是海绵结构,可达到4.063 6,能够实时监测接触力的大小和分布。ABRO Z A 等[11]采用熔融沉积建模(Fused Deposition Modelling,FDM)工艺嵌入FBG 传感器阵列制作智能床垫,用于监测睡眠姿势,该智能床垫测量的FBG 传感器波长变化与负载的差异成正比,绝对误差为4%,能够识别平躺、卧躺、侧躺(左)和侧躺(右)4 种常见的睡姿,但FDM 工艺与FBG 传感器结合可能会降低FBG 传感器的灵敏度。LIN Q J 等[12]提出了一种基于FBG 传感器的智能手套,通过测量手指各关节的角度,采用线性拟合和系数修正的方法,实现手指弯曲姿势的识别,然而该方法不能很好地拟合非线性数据。LAKHO R A 等[13]在第一跖骨、第三跖骨、第五跖骨、脚心和脚后跟共五处分别布设了FBG 传感器,通过完成站立、身体前倾、蹲下、向前折叠4 种身体姿势,验证了人体姿势的变化和足底压力分布有关,但并未进行人体姿势的判别。
本文采用COMSOL 有限元分析,设计一种基于FBG 柔性传感器人体姿势识别的智慧鞋垫,结合K 折交叉验证支持向量(K-fold Cross Validation Support Vector Regression,KCV-SVR)回归算法来提升识别精度。
1 FBG 的传感原理
光纤布拉格光栅传感器在光纤纤芯内构成空间相位周期性分布结构,成为波长选择镜[14]。如图1所示。

图1 FBG 的基本工作原理Fig.1 Basic working principle of FBG
当来自宽带光源的光入射到光纤光栅中时,反射波长λb满足[15]
式中,λb为反射波长,neff为纤芯的有效折射率,Λ为光栅周期。在光纤中引起轴向应变的任何外部扰动都会改变光栅的周期和有效折射率,从而改变布拉格波长。当应变和温度同时作用时,布拉格波长的偏移量表达式为
式中,P11和P12为有效弹光系数,υ为光纤材料的泊松比,ε为光纤中的轴向应变,α为热膨胀系数,ξ为热光系数,ΔT为温度变化。
2 有限元结构仿真与分析
在Solidworks 软件中建立足部的实体模型,设置足部的国际码尺寸为260 mm,并导入COMSOL 仿真软件,在COMSOL 的物理场中选择固体力学模块并设置稳态求解,设置尺寸为150 mm×300 mm×4 mm的足底压力板模拟鞋垫,绘制几何模型。足部与鞋垫的相关材料参数如表1 所示。

表1 材料参数Table 1 Material parameter

表2 两种模型的评价指标Table 2 Evaluation indexes of the two models
正常情况下,人无论是处于静态还是动态,足部各个结构之间接触部分并无分离现象,故可以用接触对来模拟足部与鞋垫接触,足底与鞋垫之间的摩擦系数为0.3。由于模拟的是一只脚站立时足底压力的分布情况,对足部设置垂直向下的压力300 N,再对模型进行四边形网格划分,如图2(a)。全部构建完成进行仿真研究,图2(b)显示足底压力的分布云图。

图2 模型网格划分及仿真足底压力分布云图Fig.2 Model meshing and simulated plantar pressure distribution cloud map
由图2(b)仿真结果可知,人体足底压力主要分布在大脚拇指、第一跖骨、第三跖骨和足后跟处。且足底压力板的峰值压强出现在足后跟处,达到1.14 MPa,在第一跖骨和第三跖骨处同样存在压强峰值,大小为0.85 MPa,大脚拇指处的压强达到了0.24 MPa。
3 模型构建
3.1 支持向量回归算法
基于支持向量回归(Support Vector Regression,SVR)算法的人体姿势识别首先需要构建数据集,将4 个FBG 传感器的中心波长变化量作为输入量,8 种不同姿势作为输出量。
回归问题可以看成:已知输入-输出数据集{(xi,yi)}(i=1,2,…,M),其中xi为第i个m维输入向量;yi为第i个标量输出;M为训练样本数,求解输入与输出之间的关系[16-17]。
SVR 是支持向量机(Support Vector Machine,SVM)的一个重要分支,常用于回归分析与函数逼近问题,对于给定的样本
SVR 通过寻找最优函数y=f(x)从而推测出与x对应的y值,即
式中,f(x)是回归超平面,ϕ(x)是关于x的输入量,ω和b是超平面定义的参数。
引入惩罚因子c和松弛变量因子ξi,ξi∗得到优化目标
SVR 利用非线性映射算法将低维线性不可分样本映射到线性可分的高维特征空间,SVR 的函数表达式为
式中,αi、αi*是拉格朗日数乘因子;K(xi,xj)=φ(xi)⋅φ(xj)是核函数,采用的是径向基函数,其表达式为
式中,g为核函数参数。
3.2 支持向量回归的参数优化
惩罚参数c和核函数参数g会影响支持向量回归的预测效果,通过K 折交叉验证法对参数进行优化。交叉验证的基本思想是对数据集进行分组,一部分作为训练集,另一部分作为测试集,利用训练集对分类器训练,然后将测试集引入训练集得到模型,对模型进行最终评估[18]。
K 折交叉验证(KCV)[19-20]是指将数据集随机分成K组,不重复地抽取其中一组作为测试集,剩余的K-1 组作为训练集,如图3。本次实验选取K值为5。

图3 K 折交叉验证Fig.3 K fold cross verification
由K 折交叉验证在训练集中得到评估结果,将K个模型测试集输出结果准确率的平均值作为K 折交叉验证分类器的指标参数,通过K 折交叉验证自动搜索最优参数惩罚因子c和径向基函数参数g。图4 为KCV优化SVR 的具体步骤。

图4 KCV-SVR 的具体流程Fig.4 Specific flow of KCV-SVR
3.3 模型的评价指标
在支持向量回归分析中,通常采用均方根误差(RMSE)、平均绝对误差(MAE)和决定系数(R2)三种评价指标[21]来判断模型预测结果的好坏。其表达式为
式中,Yi为样本的实际观测值;i是模型的预测值;i是样本的平均值。
RMSE 和MAE 表示预测模型中真实值和预测值之间的误差,也表示预测模型的泛化能力,RMSE 和MAE 越接近于0,预测效果和泛化效果越好。R2表示预测值和真实值之间的相关密切程度,其值越接近于1,相关性越好。
4 实验研究
4.1 FBG 的布设及标定
智慧鞋垫尺寸为右脚260 mm,选择4 只FBG 传感器,分别布设于大脚拇指、第一跖骨、第三跖骨和足后跟处,采用PDMS 硅胶封装[22-24],如图5(a)。为避免FBG 中心波长的重叠,4 只FBG 中心波长分别为1 529.912 nm、1 539.945 nm、1 546.022 nm 和1 554.810 nm,图5(b)为4 只FBG 初始中心波长光谱。

图5 FBG 传感器的布设位置及其光谱Fig.5 Location and spectral diagram of FBG sensor
对4 只FBG 传感器进行标定,实验过程中保持室温不变。采用MOI Si155 光纤光栅解调仪,波长精度1 pm,测量频率1 000 Hz。通过砝码加压,从5 N 开始,每间隔5 N 加压,直至35 N,实验过程重复5 次,取波长偏移量的平均值。利用最小二乘法进行线性拟合,拟合结果如图6 所示,可见FBG 的波长偏移量对压力具有较高的线性度及灵敏度。

图6 FBG 传感器与压力的关系Fig.6 Relationship between FBG sensors and pressure
4.2 实验设计及数据采集
实验共征集25 名足部正常的参与者,年龄在22~24 岁之间,足部尺寸大小为260 mm。将智慧鞋垫放置于光滑平整、质地坚硬的地面,要求每一位参与者测试时保持身体平衡,左右脚均匀分配体重,完成如图7 所示的8 种常见姿势,分别为站立、坐、单脚站立、向前折叠、前倾、后倾、半蹲、全蹲。测试过程中每个姿势保持15 s,重复该姿势两次,测得FBG 中心波长变化量并取其平均值。图8 分别为站立和单脚站立姿势下FBG传感器的波长偏移。
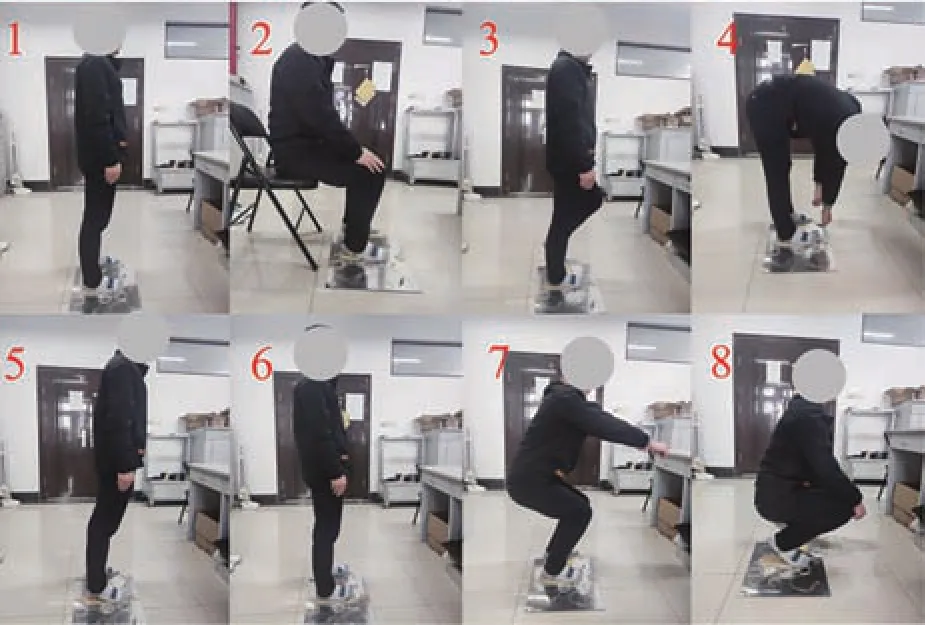
图7 参与者表现的不同姿势Fig.7 Different postures of participants

图8 站立和单脚站立姿势下FBG 的中心波长偏移Fig.8 The center wavelength deviation of FBG in standing and one-legged standing posture
4.3 实验结果分析
采用支持向量回归(SVR)和基于K 折交叉验证优化的支持向量回归(KCV-SVR)分别对人体姿势进行识别,数据集200 组,训练样本占比0.8。
图9 为K 折交叉验证对支持向量回归参数寻优的过程。由图可见,通过KCV 法后得到惩罚因子和径向基函数参数最优解分别为0.5 和8。

图9 KCV 法参数选择(K=5)Fig.9 Parameter selection of KCV method (K=5)
经过KCV 法优化后的SVR 和未优化的SVR 两种模型对人体不同姿势的预测结果如图10,两种模型的评价指标结果见表2。

图10 SVR 和KCV-SVR 预测结果Fig.10 Prediction results of SVR and KCV-SVR chart
从图10 和表2 可以看出,KCV-SVR 回归预测性能较SVR 回归预测性能好,SVR 回归模型的均方根误差RMSE 为0.510 6,平均绝对误差MAE 为0.132 3,决定系数R2为0.967 7;而KCV-SVR 回归模型的RMSE较之降低0.460 4,MAE 减少66.3%,R2提高3.3%。
图11 是采用Min-Max 将采集到的数据映射到[0,1]之间后,SVR 和KCV-SVR 回归模型的预测误差,其中SVR 最大误差达到0.309 6,最小达到0.012,平均误差为0.088 4。而KCV-SVR 最大误差达到0.301 6,最小达到0.001 5,平均误差为0.057 6。证明了K 折交叉验证支持向量回归模型对人体姿势预测效果更佳。

图11 SVR 和KCV-SVR 预测误差Fig.11 SVR and KCV-SVR prediction errors
5 结论
本文针对常见的人体姿势设计了一种基于FBG 柔性传感器人体姿势识别的智慧鞋垫,并结合KCVSVR 回归算法来提升姿势识别精度。利用COMSOL 仿真软件构建了人体站立姿势下的鞋垫受力模型,根据仿真结果,站立姿势下足底主要受力部位是大脚拇指、第一跖骨、第三跖骨和足后跟处。在此基础上,制作了柔性智慧鞋垫,并将FBG 传感器布设在四处主要受力部位。通过25 名参与者完成8 种常见的人体姿势,共构建200 组数据集。引入了KCV-SVR 回归模型对数据集进行训练,并将SVR 回归模型作为预测参考。研究结果表明,KCV-SVR 回归模型的RMSE 和MAE 比SVR 回归模型分别降低0.460 4 和0.087 7,决定系数R2为0.999 6。可见,KCV-SVR 回归模型可基本实现对人体姿势的识别。
此外,本文仅仅针对人体姿势进行识别,后续还可对姿势的正确性进行评估,以及实现对运动过程中姿势的实时监测。
猜你喜欢
农业知识(2021年5期)2021-04-06 12:34:10
文苑(2020年5期)2020-06-16 03:18:10
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:38
中国生殖健康(2019年10期)2019-01-07 01:20:58
消防界(电子版)(2018年17期)2018-02-18 11:55:15
故事作文·高年级(2016年11期)2016-11-28 14:54:34
实用手外科杂志(2015年2期)2015-08-28 09:50:38
军事文摘·科学少年(2014年11期)2014-04-29 00:44:03
快乐作文·低年级(2014年2期)2014-02-19 07:54:46
中国骨与关节杂志(2014年7期)2014-02-13 10:55:55