基于测量矢量插入法的双电机相电流重构
2024-01-12 00:00:00耿强余朝阳周湛清
天津工业大学学报 2024年6期


















摘" " 要: 针对五桥臂逆变器驱动双永磁同步电机系统进行相电流重构存在电流重构盲区、有效矢量采样法在电流重构盲区内无法准确完成电流重构等问题。基于安装在直流母线上的单电流传感器,分析了五相电流重构原理以及电流重构盲区,进而提出了一种测量矢量插入法,实现了盲区内2台电机的相电流重构,并利用重构的相电流进行双电机的独立闭环控制。仿真结果表明:本文算法实现了五桥臂逆变器驱动双永磁同步电机系统的相电流重构,2台电机的相电流重构误差较小,重构的相电流用于电机控制不会对电机的稳态性能造成影响,并且2台电机均具有良好的动态性能。
关键词: 双永磁同步电机;五桥臂电压源逆变器(FL-VS1);单电流传感器;相电流重构;测量矢量插入法
中图分类号: TM341;TM351" " " " "文献标志码: A" " " " " " " " 文章编号:" 1671-024X(2024)06-0080-09
Phase current reconstruction of two motors based on measurement vector
insertion method
GENG Qiang, YU Zhaoyang, ZHOU Zhanqing
(School of Electrical Engineering, Tiangong University, Tianjin 300387, China)
Abstract: The phase current reconstruction of the dual permanent magnet synchronous motor system driven by the five-leg inverter has problems such as current reconstruction blind area and the inability of the effective vector sampling method to accurately complete the current reconstruction in the current reconstruction blind area. Based on a single current sensor installed on the DC bus, the principle of five-phase current reconstruction and the current reconstruction blind area is analyzed, and then a measurement vector insertion method is proposed to achieve the phase current reconstruction of the two motors in the blind area, and the reconstructed phase current is used to perform independent closed-loop control of the dual motors. The simulation results show that the algorithm in this paper realizes the phase current reconstruction of the dual permanent magnet synchronous motor system driven by the five-leg inverter, the phase current reconstruction errors of the two motors are small, the reconstructed phase currents are used for motor control without affecting the steady-state performance of the motors, and both motors have good dynamic performance.
Key words:" dual permanent magnet synchronous motor; five-leg voltage source inverter(FL-VSI); single current sensor; phase current reconstruction; measurement vector insertion method
近年来,永磁同步电机(permanent magnet synchronous motor, PMSM)以结构简单、功率密度大、可靠性高等诸多优势,在风力发电、数控机床等诸多工业场合得到了广泛应用[1-3],并且很多场合都涉及两电机的协同控制。通常两电机系统由六桥臂电压源逆变器驱动,当任意一相桥臂发生故障时,系统都不能正常运行。五桥臂电压源逆变器作为一种六桥臂逆变器在一相桥臂发生故障时的容错方案,近年来成为了研究热点[4-7]。
由于公共桥臂,传统的调制方式不再适用于五桥臂逆变器驱动双电机系统。文献[8]提出半周期调制策略,该策略通过在前后2.5个周期内分别输出2台电机所需的电压矢量实现了2台电机的独立控制,但每台电机总有0.5个周期由零矢量控制,这会限制两电机的调速范围。文献[9]通过一种占空比校正调制策略对电机的零矢量和有效矢量进行重新分配,在实现2台电机独立控制的同时,扩展了2台电机的调速范围。
当永磁同步电机采用矢量控制算法时,通常需要多个电流传感器检测三相电流信息来实现电机的双闭环控制。这不仅会增加系统的成本和体积,而且电流传感器的参数差异会带来误差,因此,近年来基于单电流传感器的相电流重构技术得到了广泛关注。文献[10-11]提出基于安装在直流母线上的单电流传感器的相电流重构技术,这些方法虽然可以通过直流母线电流中包含的相电流信息实现电流重构,但是由于直流母线电流采样所需的最小时间的限制,在电压矢量的运行区域内会产生电流重构盲区,主要包括扇区边界区域和低调制区域[12]。为了实现盲区内的电流重构,文献[13-18]提出修改PWM波的相电流重构策略;文献[14-15]通过在零矢量内插入测量矢量来完成直流母线电流采样,以实现电机的相电流重构。为了减少电流纹波和开关损耗,文献[16]提出脉冲移位法,该方法在电流重构盲区内左右平移逆变器的驱动信号,使每个直流母线电流采样间隔都满足采样要求,从而达到电流重构的目的;文献[17] 通过修改逆变器开关状态以满足直流电流的采样要求,根据逆变器的开关状态实现了交流侧电动机相电流的重构;文献[18] 通过三态脉宽调制技术将有效开关状态安排在一个PWM 周期的边界和中心位置来减少电流重构盲区;文献[19]基于一种混合脉宽调制技术,提出一种矢量脉冲插入法,实现了过调制区域的相电流重构,拓宽了电机的运行范围;文献[20]提出一种空间矢量调制方法和不使用零开关状态的 PWM 方法结合的混合脉宽调制方法,该方法可以减少电流失真和扩展电流调速范围;文献[21] 提出一种利用单电阻采样电流的相电流重构技术,通过修改SVPWM的占空比对非观测区进行补偿,解决了非观测区内无法准确重构相电流的问题。
本文以五桥臂电压源逆变器驱动双永磁同步电机系统为研究对象,提出利用安装在直流母线上的单电流传感器实现两电机的电流重构。首先采用一种中心化调制策略来实现两电机的独立控制,详细分析两电机系统基于中心化调制策略的相电流重构原理,并采用有效矢量采样法进行两电机的相电流重构。由于直流母线电流最小采样时间的限制会存在电流重构盲区,本文提出一种测量矢量插入法来实现盲区内两电机的相电流重构,该策略通过在零矢量[1 1 1 1 1]作用时间内插入4个测量矢量,并在每个测量矢量的作用时间内对直流母线电流进行采样,然后根据直流母线电流中包含的相电流信息实现两电机相电流重构。
1 五桥臂逆变器驱动双永磁电机系统
1.1 五桥臂逆变器双永磁电机拓扑结构
五桥臂逆变器(FL-VSI)是把一相桥臂作为公共桥臂,分别与另外4个桥臂组成2个逆变器来驱动2台电机。五桥臂逆变器驱动双永磁同步电机系统的拓扑结构如图1所示。
图1中,A相桥臂为公共桥臂,分别与B、C桥臂组成逆变器1驱动PMSM1,与D、E桥臂组成逆变器2驱动PMSM2。
设Sx(x=A, B, C, D, E)为五桥臂逆变器的开关函数,当上开关管开通、下开关管关断时,令Sx=1;当上开关管关断、下开关管开通时,令Sx=0。该系统的电压空间矢量如图2所示。
由图2可知,每台电机的参考电压矢量都由6个非零电压矢量和2个零电压矢量合成。
1.2 中心化调制策略
由于五桥臂逆变器存在公共桥臂,传统的调制方式不再满足控制要求。本节采用一种中心化调制策略,在满足2台电机在公共桥臂上的占空比相等的同时,实现两电机的独立控制。
设PMSM1的三相占空比分别为a1、b1、c1, PMSM2的三相占空比分别为a2、b2、c2,占空比计算如式(1)所示:
式中:Ti为2台电机各相桥臂上开关器件的导通时间;Ts为控制周期。
中心化调制策略的具体步骤为:
第1步:将2台电机的三相占空比分别减去各自三相占空比的最小值,可以得到2台电机有效各相占空比。
i0 = i - min1(i = a1,b1,c1)j0 = j - min2(j = a2,b2,c2)(2)
式中:min1、min2分别为PMSM1、PMSM2三相占空比的最小值。
第2步:为了保证2台电机公共相的占空比相等,使2台电机各相占空比分别加上另一台电机在公共桥臂上的占空比。
A0 = a10 + a20B0 = b10 + a20C0 = c10 + a20D0 = b20 + a10E0 = c20 + a10(3)
第3步:经过式(3)运算,如果A0、B0、C0、D0、E0的值均大于零,为进一步拓展有效电压矢量的运行范围,还可以做进一步优化,如式(4)所示:
A1 = A0 - minB1 = B0 - minC1 = C0 - minD1 = D0 - minE1 = E0 - min(4)
式中:min为A0、B0、C0、D0、E0的最小值。
第4步:经过式(2)、(3)、(4)计算,五桥臂逆变器开关序列中不会出现开关状态[1 1 1 1 1],为减少电流谐波,通过式(5)把零矢量的作用时间平均分配给零矢量[0 0 0 0 0]和零矢量[1 1 1 1 1]。
A = A1 +B = B1 +C = C1 +D = D1 +E = E1 +(5)
式中:A、B、C、D、E分别为五桥臂逆变器各桥臂的占空比;max为五相占空比A1、B1、C1、D1、E1的最大值。以PMSM1和PMSM2的电压矢量都位于第Ⅱ扇区为例,五桥臂逆变器基于中心化调制策略的开关序列如图3所示。
2 相电流重构
2.1 双电机相电流重构原理
由上一节可知,五桥臂逆变器的每相桥臂都有2种开关状态,因此五桥臂电压源逆变器共有32种开关状态。在不同的开关状态下电流达到稳态时的流通路径各不相同,因此直流母线电流在不同的开关状态下会包含不同的相电流信息。其中,规定电流的流入绕组方向为正,电流的流出绕组方向为负。以开关状态[0 1 0 0 0]为例,当电流达到稳态时的流通路径如图所示,电流从B桥臂的上开关管流入绕组,从A、C、D、E桥臂的下开关管流出绕组,此时直流母线电流与PMSM1的b1相绕组电流ib1大小相等,方向相同。
同理,通过分析每种开关状态下当电流达到稳态时的电流回路,可以得到直流母线电流和2台电机绕组电流之间的对应关系,如式(6)所示。
idc = SAia + SBib1 + SCic1 + SDib2 + SEic2(6)
由式(6)可知,当开关状态为[0 0 0 0 0]和[1 1 1 1 1]时,idc等于零,直流母线电流中不包含相电流信息。在其余30种开关状态下,idc中都包含2台电机不同的相电流信息。在基于中心化调制策略的五桥臂逆变器驱动双永磁电机系统中,每个控制周期都包括4个不同的开关状态,然后分别在每个开关状态作用时间内采样直流母线电流,可以得到4个独立的直流母线电流关于两台电机相电流的方程。另外,由于PWM频率远高于电机的正常工作频率,可以认为电机的相电流在一个控制周期内保持不变。然后,通过4个方程可以得到每台电机的两相电流。最后根据电机定子绕组采用星形连接三相电流和为零,可以实现每台电机的三相电流重构。
2.2 基于有效矢量采样法的相电流重构
由2.1节分析可知,在每种开关状态下电流达到稳态时的流通路径都是从开关函数为1的桥臂流入绕组,从开关函数为0的桥臂流出绕组。直流母线电流是开关函数为1的桥臂对应的相电流之和,同时也是开关函数为0 的桥臂对应相电流之和的负数。假设五桥臂逆变器的五相占空比从大到小依次为n(n=1, 2, 3, 4, 5),i(n=1, 2, 3, 4, 5)分别是占空比为n的桥臂对应的相电流。那么,在1个周期内五相桥臂分别对应的相电流与采样得到的4个直流母线电流之间的对应关系如式(7)所示:
i = isam1i = isam2 - isam1i = isam3 - isam2i = isam4 - isam3i = isam4(7)
式中:isam1、isam2、isam3、isam4分别为在采样间隔ΔT1、ΔT2、ΔT3、ΔT4内采样得到的直流母线电流。
在每个控制周期内通过式(7)都可以重构出五桥臂逆变器对应的五相电流im_re(m = a, b1, c1, a2, b2)。其中,ia_re为公共桥臂对应的相电流,是2台电机a相重构电流的和。然后根据电机绕组星形连接时三相电流和为零可以得到每台电机的a相重构电流如式(8)所示,实现2台电机的相电流重构。
ia1_re = ia_re + ib2_re + ic2_reia2_re = ia_re + ib1_re + ic1_re(8)
以PMSM1的电压矢量位于第Ⅲ扇区,PMSM2的电压矢量位于第Ⅱ扇区为例,此时一个周期内的开关序列如图5所示。
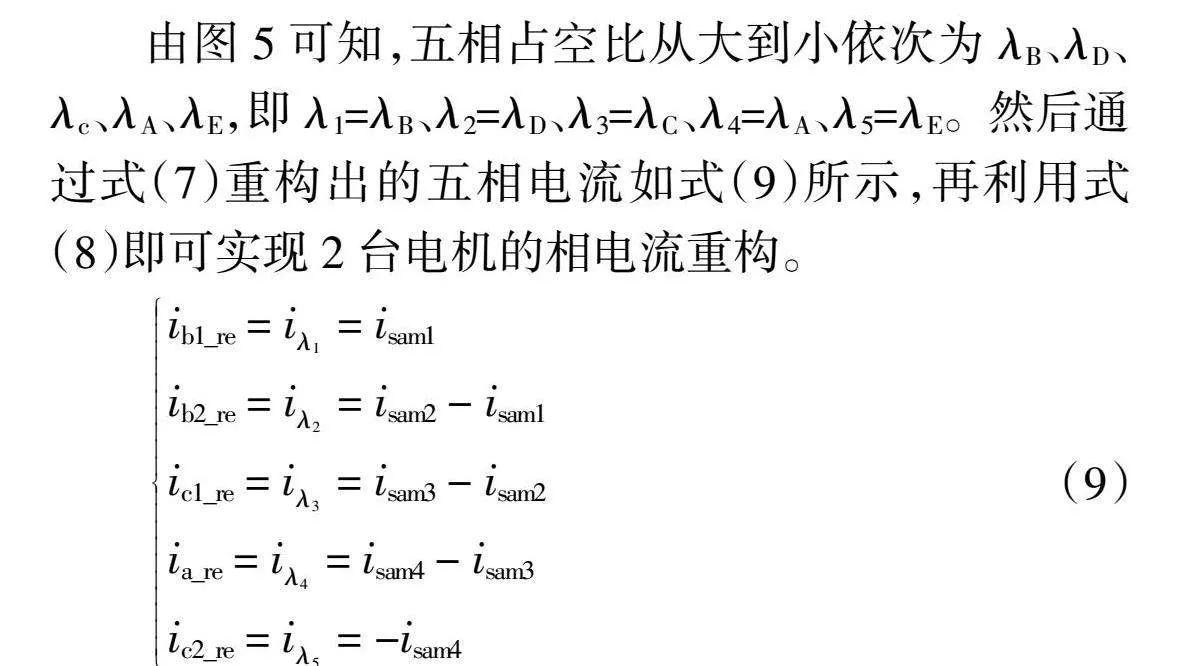
由图5可知,五相占空比从大到小依次为B、D、c、A、E,即1=B、2=D、3=C、4=A、5=E。然后通过式(7)重构出的五相电流如式(9)所示,再利用式(8)即可实现2台电机的相电流重构。
ib1_re = i = isam1ib2_re = i = isam2 - isam1ic1_re = i = isam3 - isam2ia_re = i = isam4 - isam3ic2_re = i = -isam4(9)
2.3 电流重构盲区分析
由文献[22]可知,在理想情况下,直流母线电流采样可以瞬间完成;而在实际应用中,由于死区效应、AD采样延迟、开关管自身通断需要时间等一些非理想因素,无法瞬间完成直流母线电流采样,只有当每个采样间隔都不小于最小采样时间Tmin时才能准确地检测直流母线电流,实现电流重构。
当五桥臂逆变器驱动双电机系统利用安装在直流母线上的单电流传感器进行相电流重构时,只有当一个控制周期内的4个采样间隔内都能准确地检测直流母线电流时,才能实现电流重构。否则,将会产生电流重构盲区。
为了详细分析盲区产生的过程,以PMSM2的电压矢量在第Ⅱ扇区保持不变,PMSM1的电压矢量在第Ⅲ扇区内任意变化为例,PMSM2的2个有效电压矢量的作用时间都大于2Tmin。此时五桥臂逆变器的五相占空比按2台电机有效电压矢量的作用时间划分有3种大小关系,并且4个采样间隔与2台电机有效电压矢量的作用时间在每种情况下的对应关系如表1所示。
表1中:t1a、t1b为PMSM1的2个有效电压矢量的作用时间;t2a、t2b为PMSM2的2个有效电压矢量的作用时间。由以上分析可知,在每种情况下只要PMSM1的2个有效电压矢量的作用时间使任意一个采样间隔小于Tmin ,就会产生电流重构盲区。
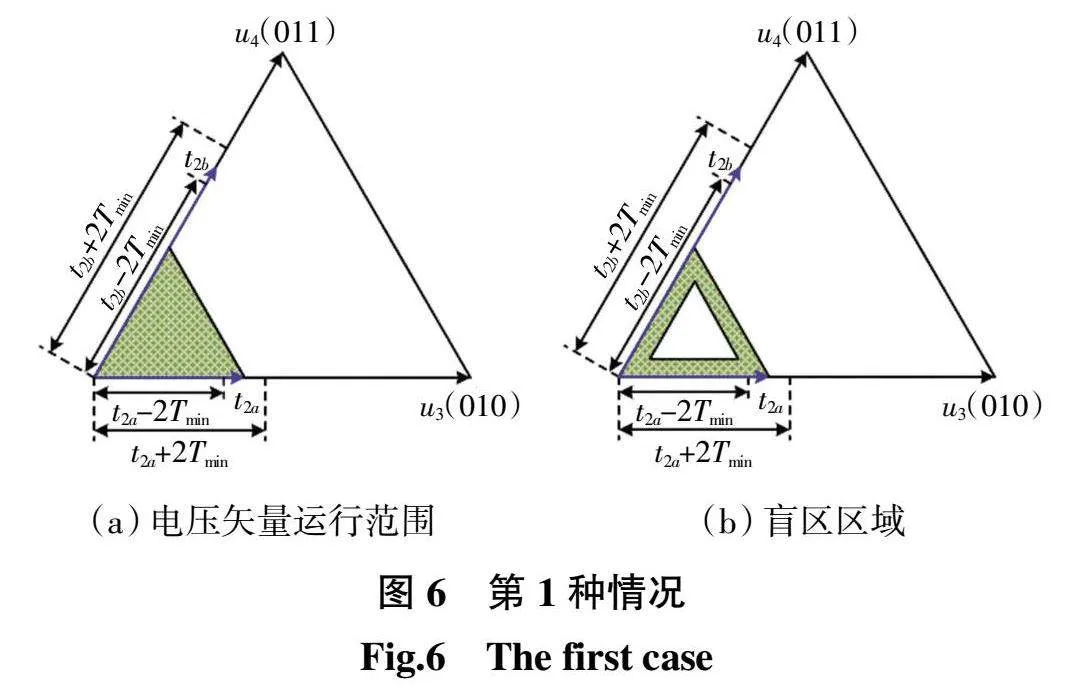
图6所示为第1种情况。当t1a + t1b lt; t2a时,PMSM1的电压矢量运行范围如图6(a)所示,在此区域内,ΔT4大于Tmin。只有当t1a lt; 2Tmin或t1b lt; 2Tmin或t1a + t1b gt; t2a - 2Tmin使采样间隔ΔT1、ΔT2、ΔT3不满足采样要求时,无法实现电流重构,此时产生的电流重构盲区如图6(b)所示。
图7所示为第2种情况。当t1b lt; t2a lt; t1a + t1b时,PMSM1的电压矢量运行范围如图7(a)所示,在此区域内,ΔT4大于Tmin。只有当t1a + t1b gt; t2a - 2Tmin或t1b gt; t2a - 2Tmin或t1b lt; 2Tmin使得3个采样间隔ΔT1、ΔT2、ΔT3不满足采样要求时,无法实现电流重构,此时产生的电流重构盲区如图7(b)所示。
图8所示为第3种情况。 当t2a lt; t1b时,PMSM1的电压矢量运行范围如图8(a)所示,在此区域内,ΔT4恒大于Tmin。只有当t1a lt; 2Tmin或t1b lt; t2a + 2Tmin使得ΔT1、ΔT2、ΔT3 3个采样间隔不满足采样要求时,无法实现电流重构,此时产生的电流重构盲区如图8(b)所示。
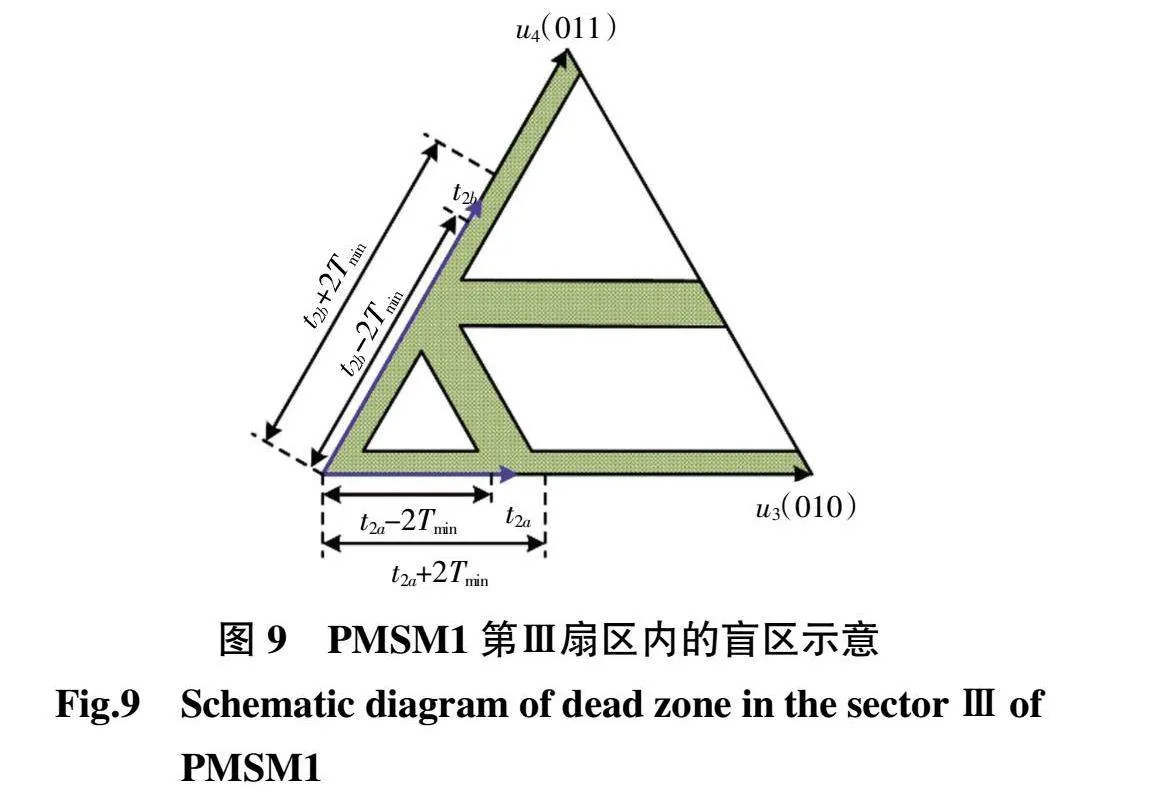
由以上分析可知,当PMSM2的电压矢量在第Ⅱ扇区内保持不变、PMSM1的电压矢量在第Ⅲ扇区内任意变化时,电流重构会产生如图9所示的电流重构盲区。
2.4 测量矢量插入法
电流重构盲区内无法准确地完成直流母线电流采样是电流重构失败的主要原因。本节提出测量矢量插入法,通过构造4个采样间隔,完成直流母线电流采样,实现盲区内电流重构。测量矢量插入法的基本原理是在电流重构盲区内的每个控制周期的零矢量[1 1 1 1 1]作用时间内依次插入测量矢量[0 1 1 1 1]、[1 0 1 1 1]、[1 1 1 0 1]、[1 1 1 1 0],每段测量矢量的作用时间为10 ?滋s,然后在4个测量矢量作用时间内对直流母线电流进行采样。由2.1节分析可知,4次采样得到的直流母线电流isam1、isam2、isam3、isam4分别与2台电机的相电流ic1、ib1、ib2、ic2大小相等,方向相反。因此,在电流重构盲区内的每个周期中,利用插入的测量矢量都可以重构出每台电机的b、c相电流,然后根据电机定子绕组星形连接三相电流和为零可以得到每台电机的a相电流,最终实现2台电机的相电流重构。
由以上分析可知,PMSM1的三相重构电流为:
ic1_re = -isam1ib1_re = -isam2ia1_re = -ib1_re - ic1_re(10)
PMSM2的三相重构电流为:
ib2_re = -isam3ic2_re = -isam4ia2_re = -ib2_re - ic2_re(11)
以图5(a)所示的开关序列为例,ΔT1和ΔT3小于Tmin,在这2个采样间隔内无法准确地采样得到直流母线电流isam1、isam3,从而会导致电流重构失败。根据提出的测量矢量插入法,插入4个测量矢量后的开关序列如图10所示。此时4个直流母线电流采样间隔变为4个测量矢量的作用时间,因此在该周期内可以完成直流母线电流采样,实现电流重构。
当采用测量矢量插入法进行2电机的相电流重构时,插入的测量矢量会引入额外的基本电压矢量合成电机的输出电压矢量,这会改变2台电机的输出电压矢量。为了使插入测量矢量后的电压矢量保持不变,选择在每个周期末的零矢量作用时间内插入补偿矢量[1 1 0 0 0]和[0 0 0 1 1],补偿矢量的作用时间和测量矢量的作用时间相等。此时在该周期内2台电机的电压矢量合成如图11所示。插入的测量矢量和补偿矢量导致引入额外的基本电压矢量u4(011)、u5(101) 和u5(110)参与2台电机的输出电压矢量的合成,这3个引入的电压矢量幅值相等,角度互差120°,并且相加等于0,因此插入补偿矢量不会改变电机输出电压矢量的幅值和相位。
3 仿真结果分析
为了验证提出的相电流重构算法在电流重构盲区内的有效性和可行性,在Matlab/Simulink中搭建了五桥臂逆变器驱动双永磁同步电机相电流重构仿真模型,进行了仿真验证。在仿真模型中,逆变器的开关频率设置为5 kHz,系统完成直流母线电流采样所需的最小时间Tmin为10 s。2台永磁同步电机的参数如表2所示。仿真将从4种工况进行分析。
3.1 稳态性能仿真
工况1为PMSM1、PMSM2均施加6 N·m负载并分别以60、40 r/min的转速恒速运行。仿真结果如图12所示。
从上到下依次为2台电机的实际三相电流、重构三相电流、a相的实际电流和重构电流、a相重构误差。由图12可以看出,在该工况下利用测量矢量插入法重构得到的2台电机的相电流和实际相电流能保持一致,PMSM1电流重构的最大误差和平均误差分别为0.41、0.20 A,PMSM2电流重构的最大误差和平均误差分别为0.43、0.21 A,重构误差较小。
工况2为PMSM1、PMSM2均施加6 N·m负载并分别以400、300 r/min的转速恒速运行。仿真结果如图13所示,从上到下依次为2台电机的实际三相电流、重构三相电流、a相的实际电流和重构电流、a相重构误差。
由图13可以看出,在该工况下利用测量矢量插入法重构得到的两台电机的相电流和实际相电流能保持一致,PMSM1电流重构的最大误差和平均误差分别为0.46、0.24 A, PMSM2电流重构的最大误差和平均误差分别为0.45、0.23 A,重构误差较小。
通过分析工况1和工况2的仿真结果可知,利用提出的测量矢量插入法重构的相电流用于电机的闭环控制可以实现两台电机的独立控制,并且电机具有良好的稳态性能,这验证了本文提出的测量矢量插入法在电流重构盲区内的有效性和可行性。
3.2 动态性能仿真
为了验证当重构的相电流用于电机的闭环控制时,2台电机的动态性能,分别进行了电机的加减速和加减载仿真。
工况3为PMSM1施加5 N·m负载以300 r/min的转速启动,并且转速在0.15 s时阶跃到400 r/min, 在0.35 s时阶跃到300 r/min,PMSM2施加6 N·m负载以300 r/min的转速恒速运行。在该工况下,2台电机的实际三相电流、重构三相电流、a相的实际电流和重构电流、a相的重构误差如图14所示。
由图14可以看出,在PMSM1的速度阶跃实验中,2台电机重构的相电流仍能和实际相电流保持一致,并且2台电机的运行状态良好。PMSM1电流重构的最大误差和平均误差分别为0.46、0.23 A, PMSM2电流重构最大误差和平均误差分别为0.45、0.21 A,重构误差较小。
工况4为PMSM1施加3 N·m负载以400 r/min的转速启动,并且负载在0.1 s时阶跃到6 N·m,在0.4 s时阶跃到3 N·m,PMSM2施加6 N·m负载以300 r/min的转速恒速运行。在该工况下,2台电机的实际三相电流、重构三相电流、a相的实际电流和重构电流、a相的重构误差如图15所示。
由图15可以看出,在PMSM1的负载阶跃实验中,2台电机重构的相电流仍能和实际相电流保持一致,并且2台电机的运行状态良好。PMSM1电流重构的最大误差和平均误差分别为0.45、0.23 A, PMSM2电流重构的最大误差和平均误差分别为0.44、0.22 A,重构误差较小。
4 结 论
针对五桥臂逆变器驱动双永磁同步电机系统进行相电流重构会存在电流重构盲区的问题,本文提出一种测量矢量插入法来实现2台电机在电流重构盲区内的相电流重构。提出的策略具有以下优点:
(1) 仅利用安装在直流母线上的单个电流传感器便可获得2台电机的相电流信息,这有利于降低驱动系统的成本和体积。
(2) 利用所提策略重构的2台电机的相电流与2台电机实际的相电流能保持一致。重构的相电流用于电机的双闭环控制,可以实现2台电机的独立控制。
(3) 采用本文策略重构的2台电机的相电流误差较小,用于电机控制不会对电机的稳态性能造成影响,并且2台电机均具有良好的动态性能。
参考文献:
[1]" " 耿强,李亮,周湛清,等. 双永磁电机系统抗扰动转速同步控制[J]. 中国电机工程学报,2021,41(19):6787-6796.
GENG Q, LI L, ZHOU Z Q, et al. Speed synchronization control of disturbance rejection of dual-PMSM system[J]. Proceedings of the Chinese Society of Electrical Engineering,2021,41(19):6787-6796(in Chinese).
[2]" " 耿强,任天亮,李新旻,等. 基于Cuk变换器的永磁记忆电机调磁控制[J]. 天津工业大学学报,2023, 42(1): 36-43, 51.
GENG Q, REN T L, LI X M, et al. Magnetic tuning control of permanent magnet memory motor based on Cuk converter[J]. Journal of Tiangong University, 2023, 42(1):36-43, 51 (in Chinese).
[3]" " 耿强, 单长帅, 刘涛, 等. 双电机刚性齿轮传动系统转矩均衡控制[J]. 电工技术学报, 2017, 32(15): 17-26.
GENG Q, SHAN C S, LIU T, et al. Torque balance control of dual-motor rigid gear drive system[J]. Transactions of China Electrotechnical Society, 2017, 32(15): 17-26 (in Chinese).
[4]" " LIM Y S, LEE J S, LEE K B. Advanced speed control for a five-leg inverter driving a dual-induction motor system[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 707-716.
[5]" " TRABELSI M, NGUYEN N K, SEMAIL E. Real-time switches fault diagnosis based on typical operating characteristics of five-phase permanent-magnetic synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 4683-4694.
[6]" " 梅杨, 王立朋, 李正熙. 提高五桥臂逆变器电压利用率的调制策略[J]. 电工技术学报, 2013, 28(12): 207-214.
MEI Y, WANG L P, LI Z X. A modulation method of five-leg inverter for voltage transfer ratio enhancement[J]. Transactions of China Electrotechnical Society, 2013, 28(12): 207-214 (in Chinese).
[7]" " 耿强, 王亮, 周湛清, 等. 五桥臂逆变器双永磁电机三矢量预测控制[J]. 电工技术学报, 2021, 36(1): 87-95.
GENG Q, WANG L, ZHOU Z Q, et al. Three-vector-based predictive control for dual permanent magnet synchronous motors fed by the five-leg inverter[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 87-95 (in Chinese).
[8]" TANAKA T, HARA A, IWASHITA M, et al. Independent speed and position vector control of two permanent magnet synchronous motors fed by a five-leg inverter with space vector modulation[C]//2012 IEEE Industry Applications Society Annual Meeting. Las Vegas, NV, USA: IEEE, 2012: 1-8.
[9]" " GENG Q, PENG Y, HE J, et al. Sensorless control method for dual permanent magnet synchronous motors driven by five-leg voltage source inverter with single current sensor[J]. IEEE Transactions on Power Electronics, 2024, 39(7): 7834-7847.
[10]" BING Z H, DU X, SUN J. Control of three-phase PWM rectifiers using a single DC current sensor[J]. IEEE Transactions on Power Electronics, 2011, 26(6): 1800-1808.
[11]" CHO Y, KORAN A, MIWA H, et al. An active current reconstruction and balancing strategy with DC-link current sensing for a multi-phase coupled-inductor converter[J]. IEEE Transactions on Power Electronics, 2012, 27(4): 1697-1705.
[12]" YAN H, XU Y X, ZOU J B, et al. A novel open-circuit fault diagnosis method for voltage source inverters with a single current sensor[J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8775-8786.
[13]" LU J D, ZHANG X K, HU Y H, et al. Independent phase current reconstruction strategy for IPMSM sensorless control without using 1 switching states[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4492-4502.
[14]" HA J I. Voltage injection method for three-phase current reconstruction in PWM inverters using a single sensor[J]. IEEE Transactions on Power Electronics, 2009, 24(3): 767-775.
[15]" KIM H, JAHNS T M. Current control for AC motor drives using a single DC-link current sensor and measurement voltage vectors[J]. IEEE Transactions on Industry Applications, 2006, 42(6): 1539-1547.
[16]" GU Y K, NI F L, YANG D P, et al. Switching-state phase shift method for three-phase-current reconstruction with a single DC-link current sensor[J]. IEEE Transactions on Industrial Electronics, 2011, 58(11): 5186-5194.
[17]" 马鸿雁, 孙凯, 魏庆, 等. PWM逆变器相电流重构研究与误差分析[J]. 电工技术学报, 2011, 26(1): 108-114, 161.
MA H Y, SUN K, WEI Q, et al. Phase current reconstruction method for PWM inverter and error analysis[J]. Transactions of China Electrotechnical Society, 2011, 26(1): 108-114, 161 (in Chinese).
[18]" LU H F, CHENG X M, QU W L, et al. A three-phase current reconstruction technique using single DC current sensor based on TSPWM[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1542-1550.
[19]" 王文杰, 闫浩, 邹继斌, 等. 基于混合脉宽调制技术的永磁同步电机过调制区域相电流重构策略[J]. 中国电机工程学报, 2021, 41(17): 6050-6059.
WANG W J, YAN H, ZOU J B, et al. Phase current reconstruction strategy of PMSM under overmodulation mode based on a hybrid space vector pulse width modulation technique[J]. Proceedings of the CSEE, 2021, 41(17): 6050-6059 (in Chinese).
[20]" LAI Y S, LIN Y K, CHEN C W. New hybrid pulse-width modulation technique to reduce current distortion and extend current reconstruction range for three-phase inverter using only DC-link sensor[J]. IEEE Transactions on Power Electronics, 2013, 28(3): 1331-1337.
[21]" 魏海峰, 陆彦如, 江廷宇, 等. 考虑非观测区补偿的永磁同步电机单电阻采样重构[J]. 电工技术学报, 2018, 33(12): 2695-2702.
WEI H F, LU Y R, JIANG T Y, et al. Single resistor sampling reconstruction of permanent magnet synchronous motor considering non-observation area compensation[J]. Transactions of China Electrotechnical Society, 2018, 33(12): 2695-2702 (in Chinese).
[22]" TANG Q P, SHEN A W, LI W H, et al. Multiple-positions-coupled sampling method for PMSM three-phase current reconstruction with a single current sensor[J]. IEEE Transactions on Power Electronics, 2020, 35(1): 699-708.
本文引文格式:
耿强,余朝阳,周湛清. 基于测量矢量插入法的双电机相电流重构[J]. 天津工业大学学报,2024, 43(6): 80-88.
GENG Q, YU Z Y, ZHOU Z Q. Phase current reconstruction of two motors based on measurement vector insertion method[J]. Journal of Tiangong University, 2024, 43(6): 80-88(in Chinese).