基于巴克码调制的非相干探测激光雷达系统设计与仿真
2024-01-12 02:27袁博资许鹏程方宇耀张兆海王茂华雷倩睿
舰船电子对抗 2023年6期
袁博资,许鹏程,方宇耀,张兆海,王茂华,雷倩睿
(空军预警学院,湖北 武汉 430019)
0 引 言
自1960年被发明以来,激光一直深受科学界的青睐,在工业、军事、医学、民生等方面被广泛应用,其重要地位不可替代。
激光雷达作为激光的当前应用之一,其发展前期主要应用于目标测距与跟踪、空间探测、气象监测等方面。21世纪以来,激光雷达小型化、轻量化及性能优化的进程迅速,应用场景也逐渐向商用领域延伸,如:车载激光雷达,三维点云成像雷达等。特别是车载激光雷达,诸多知名车企,都在大力发展高阶辅助驾驶与智能驾驶,装配激光雷达必不可少。
激光雷达之所以成为热门的传感器,主要因为其相比常规雷达具备以下优势:
(1) 激光光束发散角小,探测角度分辨率高。
(2) 具备调Q功能的激光器,其发射峰值功率高,发射脉冲窄,探测距离远(相比非调Q激光雷达)且距离分辨率高。
(3) 目前电磁频谱紧张,激光雷达工作于光波波段,应用过程不会受到其他无线电设备干扰,如常规雷达信号、无线通信信号等。
然而,激光雷达的缺点同样不可忽视:
(1) 价格昂贵。以车载雷达为例,激光雷达价格远高于毫米波雷达。
(2) 结构复杂。性能较好的激光雷达需要复杂的光学系统等,难以进一步减小其体积与质量。
(3) 作用距离短。激光波长与大气分子和大气气溶胶直径相近,易被大气吸收与散射,即便在大气能见度较高的情况下,激光仍存在较大的衰减。
(4) 抗恶劣天气能力弱。如,雾、霾、雨、雪、沙尘等天气条件,使激光衰减过快,大大降低了其作用距离。
本文主要研究改进激光雷达系统、发射信号形式以及激光雷达信号处理方法,使激光雷达能更好地发挥效能,扬长避短,降低成本。
1 激光雷达信号与系统设计
激光雷达信号调制主要包括:激光强度调制、激光脉冲位置调制、相位调制(基于伪随机码)、激光线性调频信号等。
激光脉冲位置调制信号能获得较好的匹配滤波结果,但需要较多的脉冲数以保证匹配滤波效果。在此情况下,该信号对运动目标的探测能力下降。
相位调制信号、激光线性调频信号、调频连续波信号属于相干探测激光雷达的信号体制,虽具备优秀的探测性能,但价格较高,目前应用较少。
1.1 基于巴克码调制的发射信号
本文主要采用巴克码调制发射信号,其实际信号形式为脉冲位置调制与脉冲宽度调制2种方式的结合,巴克码调制的激光雷达发射信号能有效地利用其较好的脉冲压缩性能,以达到提高接收信号信噪比、提高目标探测距离分辨率的效果。
巴克码是20世纪50年代初,R.H.巴克提出的一种具有特殊规律的二进制码组。
巴克码是一个非周期序列,目前已找到9组,并且已证明在长度小于12 100的范围内不存在其他长度的巴克码。已知的巴克码包括:[1 1],[-1 1],[1 1 -1],[1 1 -1 1],[1 1 1 -1],[1 1 1 -1 1],[1 1 1 -1 -1 1 -1],[1 1 1 -1 -1 -1 1 -1 -1 1 -1],[1 1 1 1 1 -1 -1 1 1 -1 1 -1 1]。
以上每组巴克码共有4组同构码,即原码、反码、反序码、反补码:
原码:[1 1 1 -1];
反码:[-1 -1 -1 1];
反序码:[-1 1 1 1];
反补码:[1 -1 -1 -1]。
巴克码最初应用于脉冲压缩雷达,作为雷达发射信号中二相编码信号的一种。本课题中,拟对非相干探测激光雷达发射信号进行基于巴克码的调制,利用巴克码的脉冲压缩性质,对回波信号进行一定的信号处理,提高非相干探测激光雷达的探测性能。
激光雷达发射信号st(t)表示如下:
(1)
式中:A为发射激光信号幅值。
图1为13位巴克码信号仿真图(码元宽度100 ns,“0”“1”调制)。
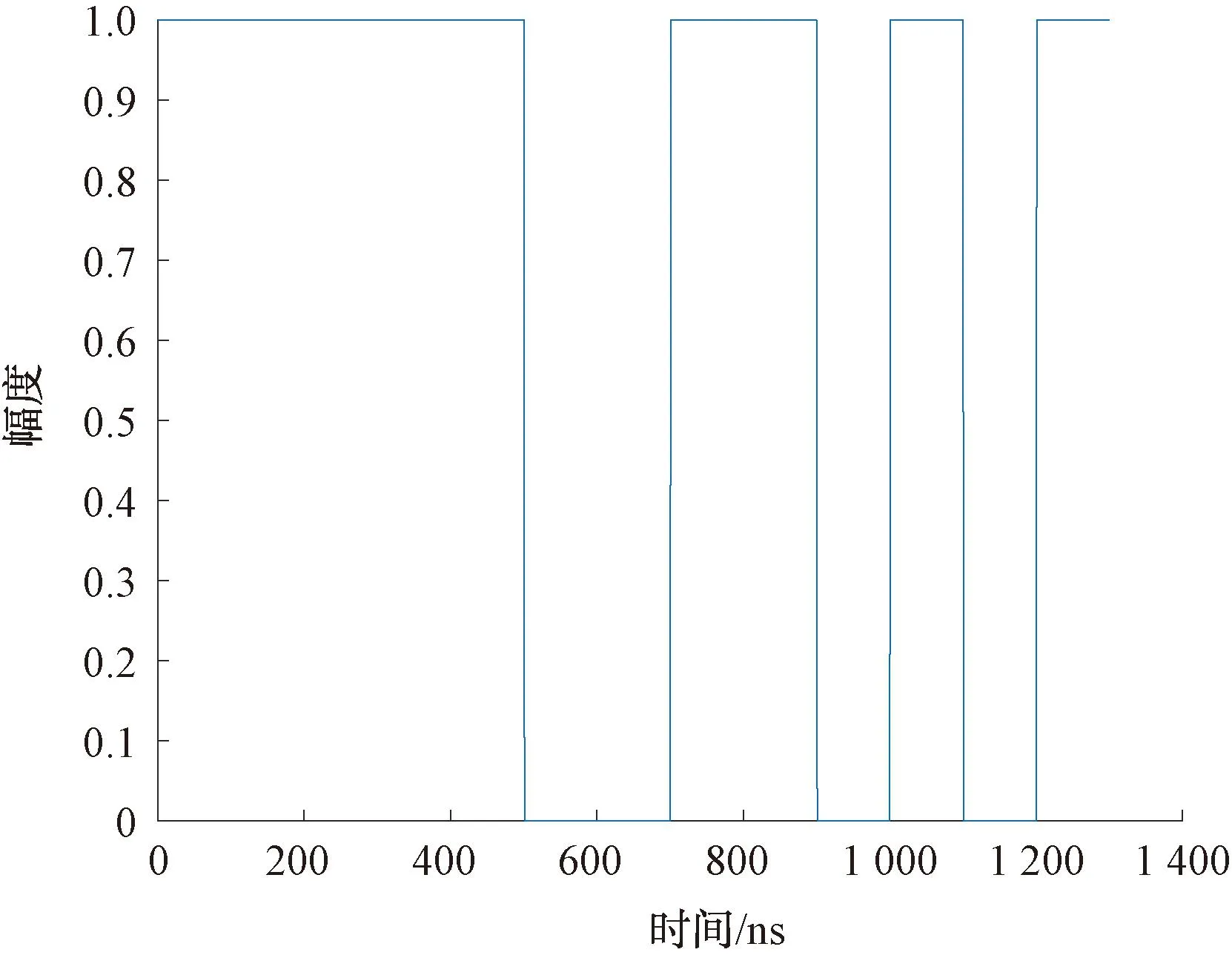
图1 13位巴克码信号仿真图
1.2 激光雷达系统设计
根据已设计改进的激光雷达发射信号,需对激光雷达系统进行针对性的设计,以达到整体适配的效果。
1.2.1 发射分系统
为实现发射如图1所示的调制激光信号,当前码元为“1”时,激光器工作发出固定强度的激光,时长为既定的码元宽度;当前码元为“0”时,激光器停止工作,时长为码元宽度。
若使用单个激光器实现如图1所示激光信号发射,则要求该激光器的脉冲重复周期小于100 ns(观察图1中900~1 300 ns时间段内信号),即脉冲重复频率最低为10 MHz,这无疑增加了激光器的成本。为实现激光发射信号调制,同时兼顾降低成本,本项目拟采用多台激光交替出光实现信号调制。图2所示为2台激光器交替出光的发射系统,2台激光机由统一的编码及控制系统控制,控制每台激光器出光时机及持续时间,则可实现发射信号调制。图3、图4分别为激光器1、激光器2所发射信号,两信号叠加即可得到如图1所示信号。若采用4激光雷达方案,如图5,每台激光器的重频可不做要求。

图2 双激光器发射系统
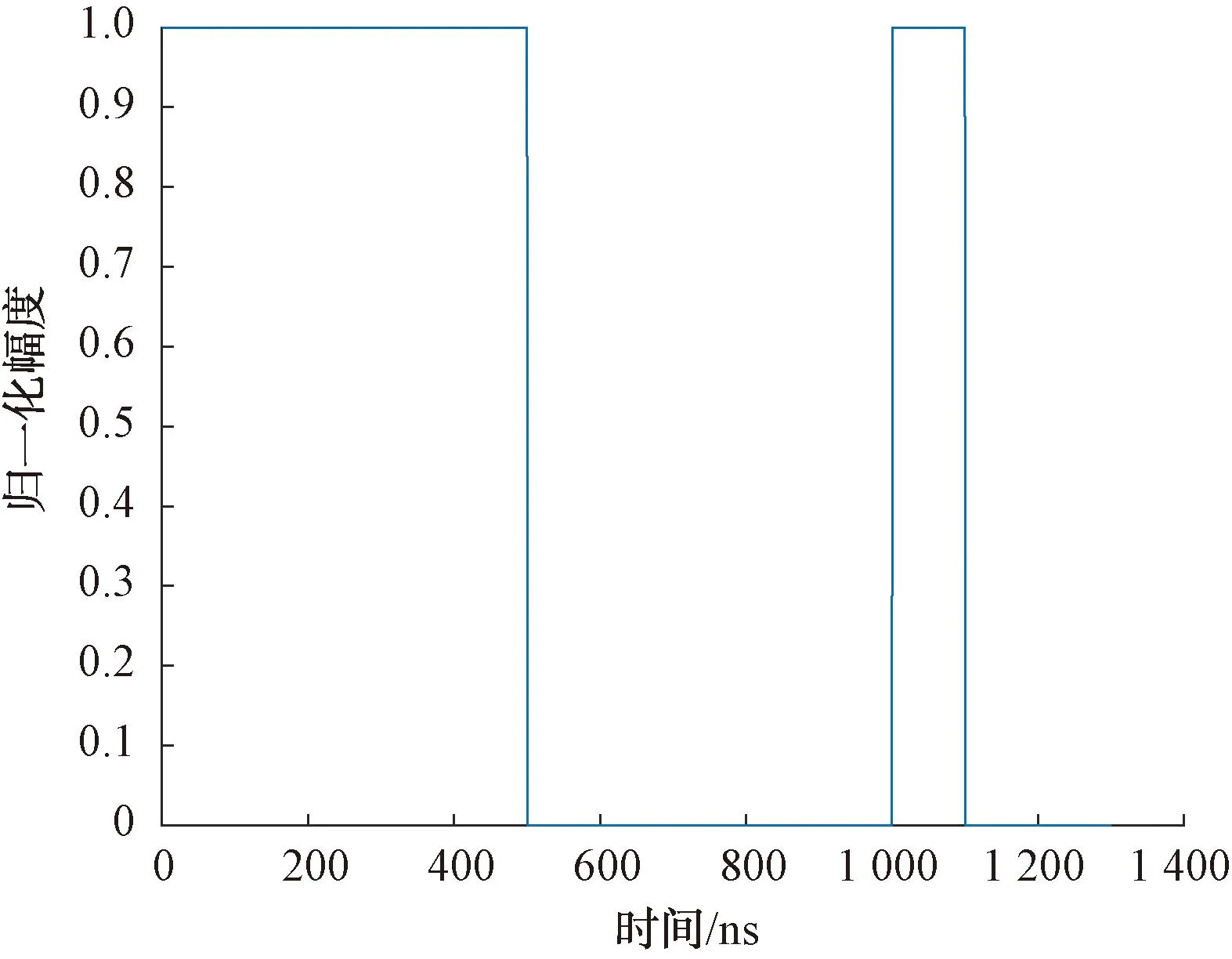
图3 激光器1发射信号
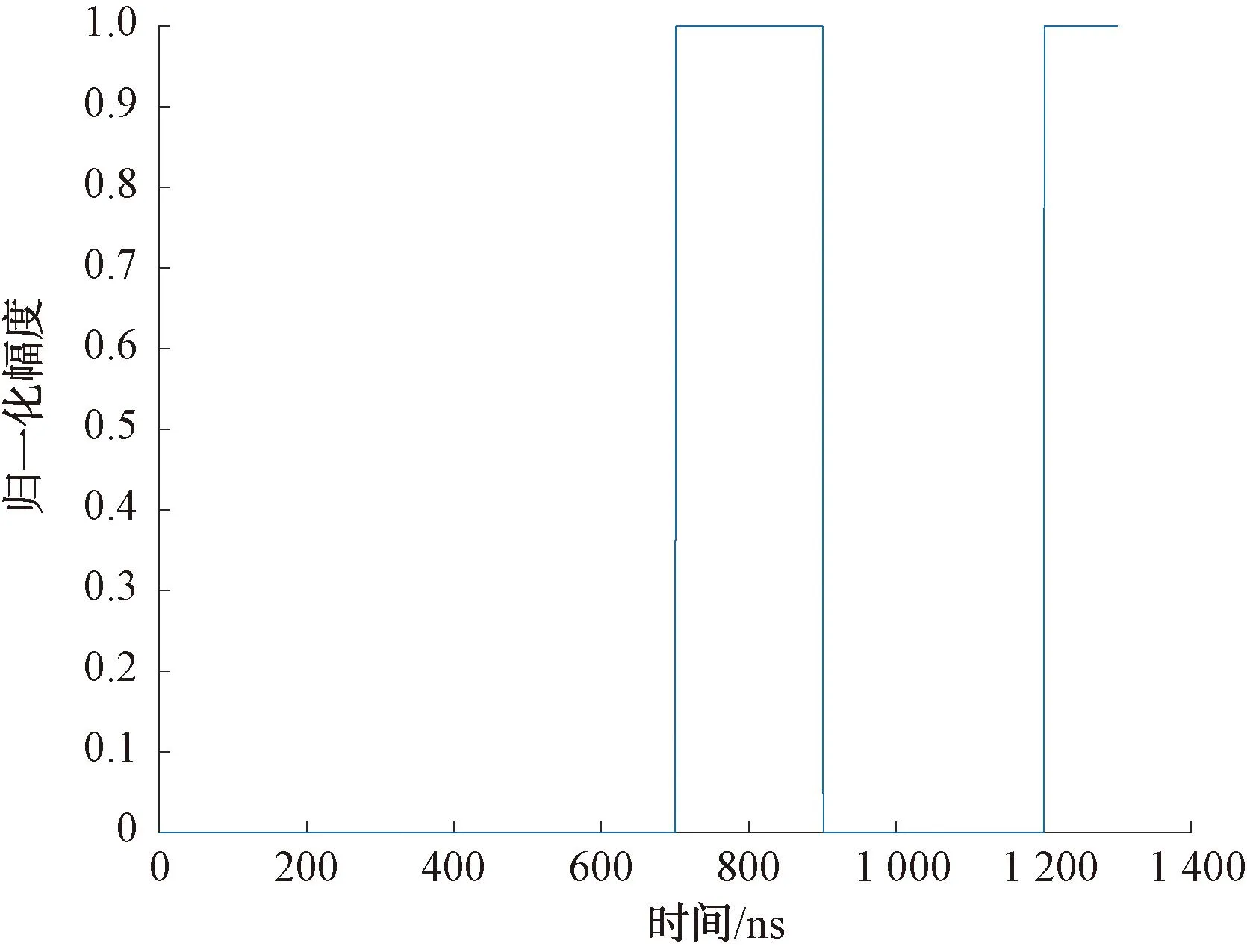
图4 激光器2发射信号
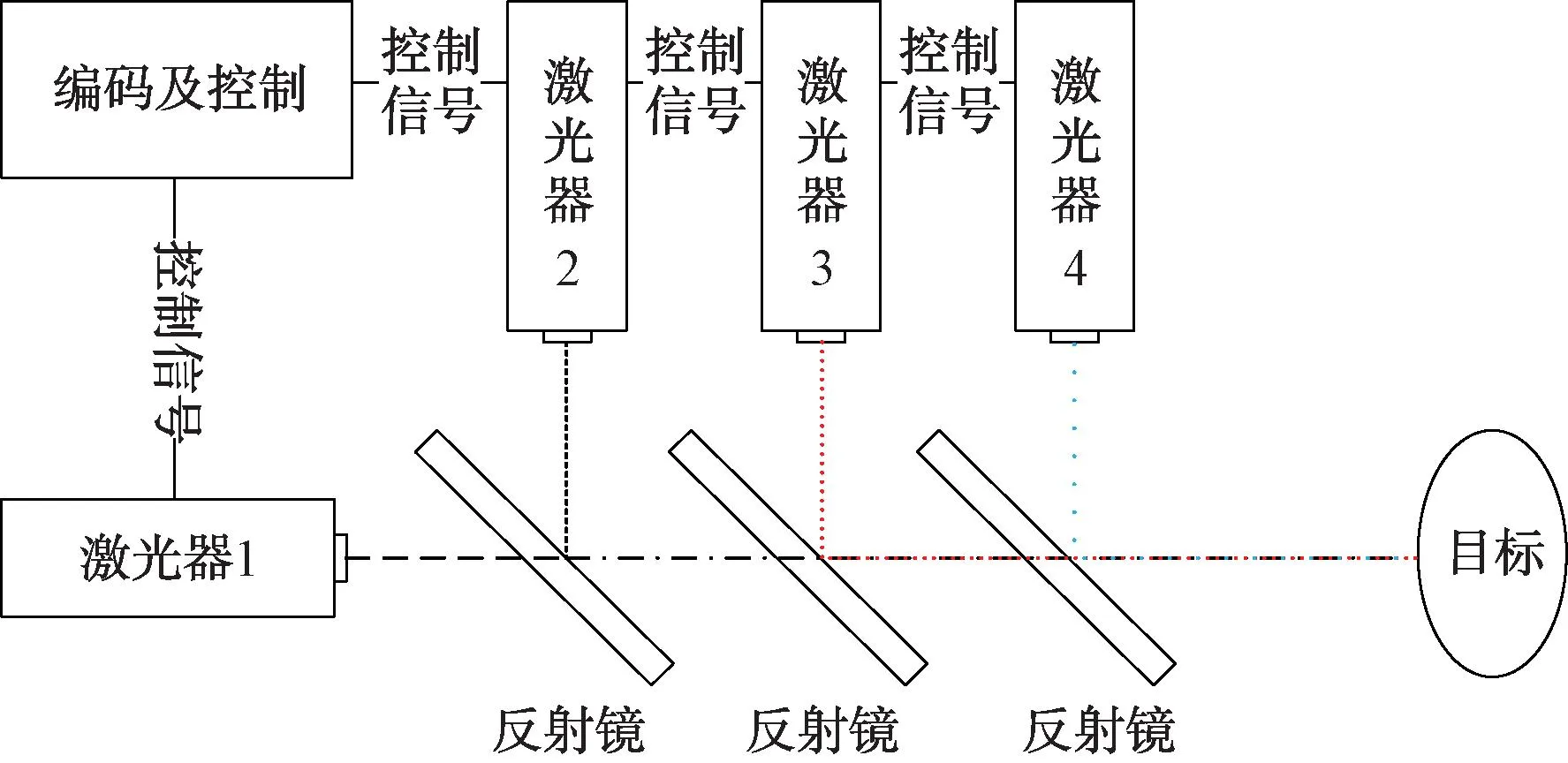
图5 4激光器发射系统
1.2.2 接收系统
激光信号调制并发射后,在大气中传输并照射到目标,经目标反射至接收系统,本课题接收系统如图6所示。
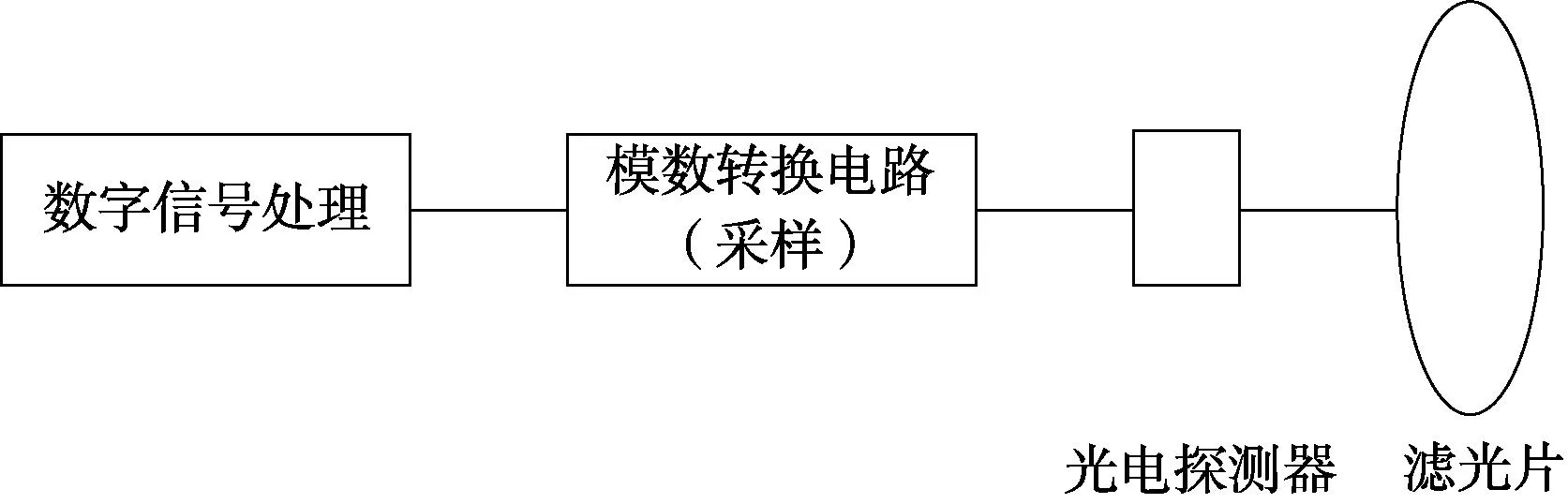
图6 接收系统
与激光回波信号一同到达接收系统的还有背景光干扰,滤光片等光学系统可将大部分背景光干扰滤除,激光回波信号与剩余的背景光干扰信号由光电探测器转换为电信号,电信号再由模数转换电路转换为数字信号,数字信号最终送入数字信号处理系统处理。
2 回波与噪声建模与仿真
2.1 激光雷达方程
激光雷达距离方程与常规雷达距离方程推导过程相似。脉冲激光雷达基本方程主要从能量角度描述了激光雷达信号从发射到接收过程中,光电探测器所接收回波功率与激光雷达发射功率、光束散角、光学系统透过率、接收视场等性能参数的关系,同时需考虑传输介质的衰减以及目标反射率、目标有效反射截面积等因素[1]。
设激光雷达发射功率为Pt,天线将激光能量进行各向同性辐射,在距离雷达R处的激光功率密度为:
(2)
实际应用中,人们不会使用各向同性天线,普遍使用功率增益为Gt的定向天线,则式(2)更新为:
(3)
此时,距离雷达R处的目标反射信号功率为:
(4)
式中:σ为激光目标截面积,是衡量目标发射能力的尺度。
目标反射激光信号至激光雷达接收设备处的功率密度为:
(5)
此时,接收到的回波功率为:
(6)
式中:Ae为接收天线有效孔径面积,Ae与光学天线直径D有关,关系为:
(7)
若考虑激光在大气中传输衰减与激光雷达光学系统的通过率,则激光雷达接收回波信号功率为:
(8)
式中:ηsys为光学系统透过率;ηa为激光大气单程传输系数。
发射天线增益Gt与激光发射光束的束散角θt有关,有:
(9)
进一步细化激光目标截面积σ:
(10)
式中:G为目标反射方向增益;Ωr为目标散射立体角;ρ为目标发射系数;Ao为激光照射目标面积。
图7为目标回波接收功率图,描述目标回波接收功率与目标距离之间的关系。仿真条件:激光雷达发射功率Pt为200 mW,激光束散角为0.1 mrad,光学孔径(直径)为4 mm,目标发射率为0.6,目标散射立体角为2π,大气透过率为0.9,光学系统透过率为0.98。
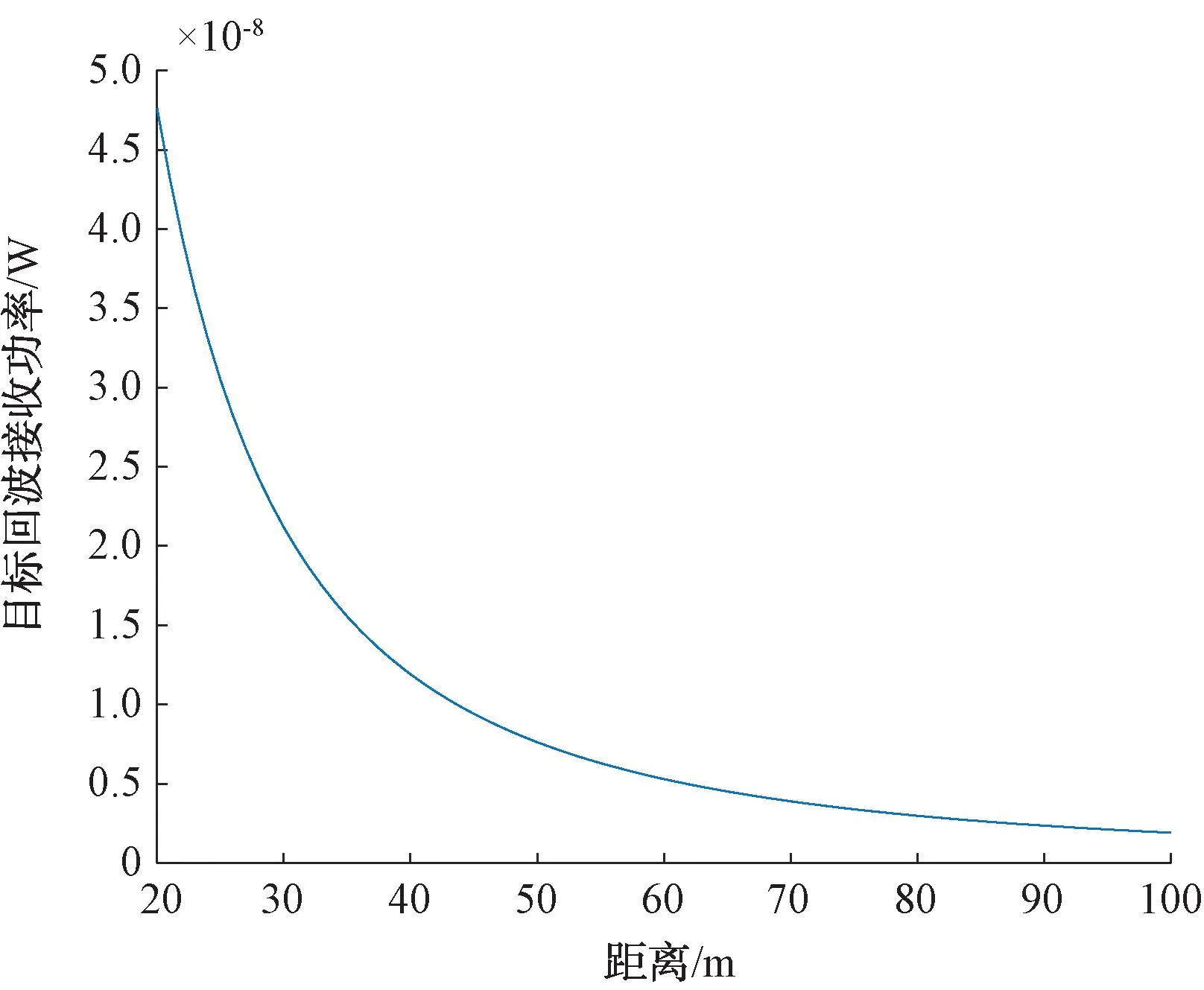
图7 接收功率仿真图
图8为激光雷达最大探测距离曲线图,描述激光雷达探测目标最大距离与激光发射功率之间的关系。仿真条件:光学接收机最小探测功率为5×10-9W,激光束散角为0.1 mrad,光学孔径(直径)为4 mm,目标发射率为0.6,目标散射立体角为2π,大气透过率为0.9,光学系统透过率为0.98。
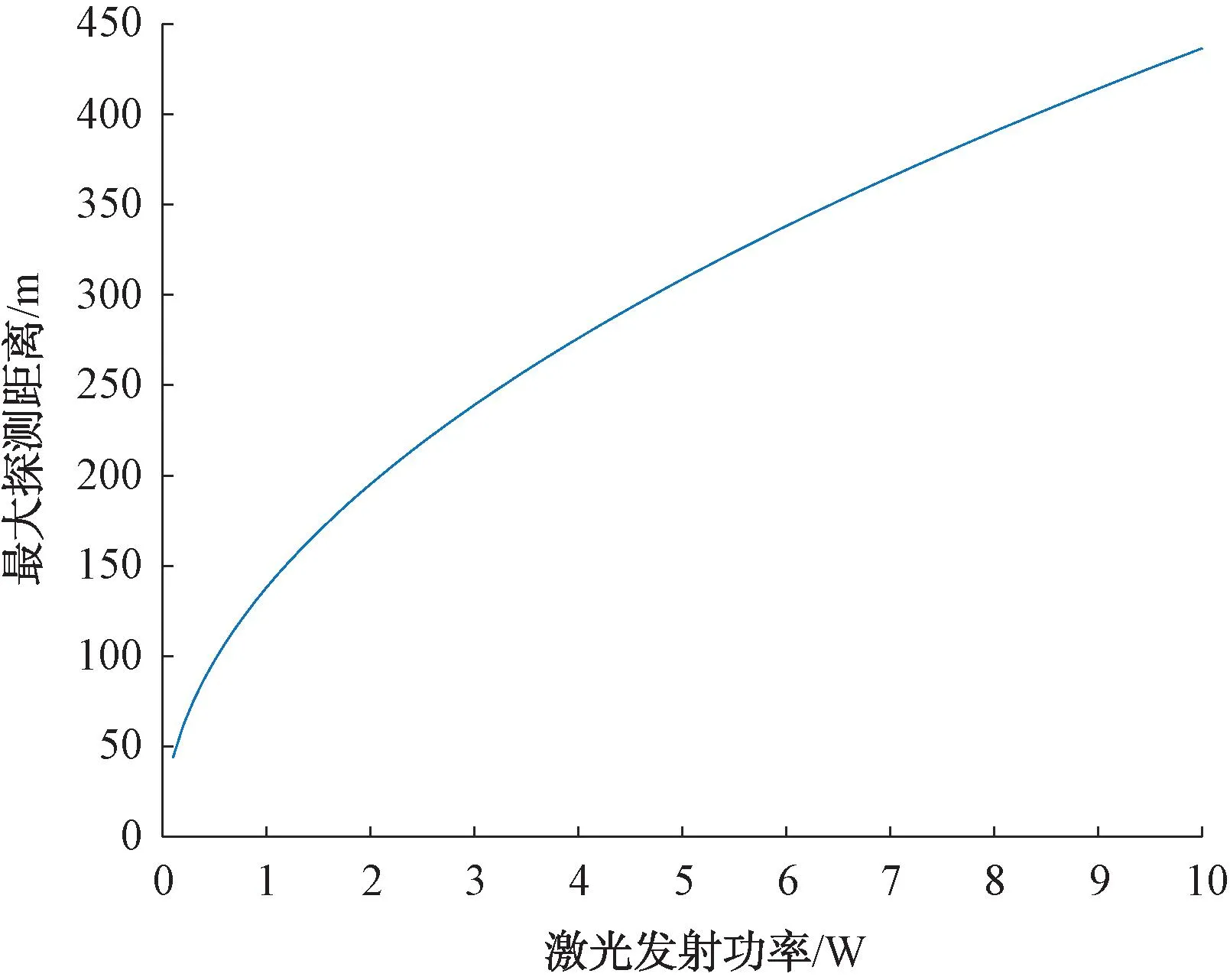
图8 最大探测距离仿真图
2.2 激光信号大气衰减
激光在大气中传播,不可避免地受到大气的影响——散射与吸收等,从而导致激光信号从发射到接收的功率进一步削弱。在2.1节已经提到激光大气单程传输系数(式(8)),然而激光的大气衰减问题较为复杂,将于本节详细讨论[2-3]。
计算激光大气传输衰减时的主要变量包括能见度VM(单位:km)、降雨/雪强度J(单位:mm/h)、传输距离R(单位:km)、衰减系数μ(λ)(单位:km-1)或α(λ)(单位:dB/km)、透过率T(λ)等。
能见度是反映气象光学视程的一个指标,一般规定为白天人眼能发现(目标的视在对比度2%时)以地平线为背景且视角大于30′的黑色目标的最大距离。实际运用中可以利用地图和GPS定位系统,借助典型地物估算能见度。
在均匀大气中,透过率T(λ)、衰减系数μ(λ)、传输距离R之间的关系为:
(11)
式中:P0、PR分别代表衰减前和衰减后的激光功率。
有时也将衰减系数定义为1 km大气对光信号功率的衰减值,记为α(λ),它与μ(λ)的关系为:
(12)
理论和实验表明,1.06 μm激光的大气传输衰减主要是由气溶胶的吸收和散射引起的,且气溶胶散射系数一般是气溶胶吸收系数的10倍左右。大气分子吸收和散射对1.06 μm激光的影响很小,在实际计算过程中可忽略。1.06 μm激光的衰减系数为:
(13)
式中:q是与地面的大气能见度VM有关的参数,一般情况下q取1.3,VM小于6 km时,q可通过下式计算:
(14)
式中:q是与地面的大气能见度VM有关的参数,可通过下式计算:
(15)
利用式(15)对q值进行计算,可得到q值与大气能见度VM的关系曲线如图9所示。
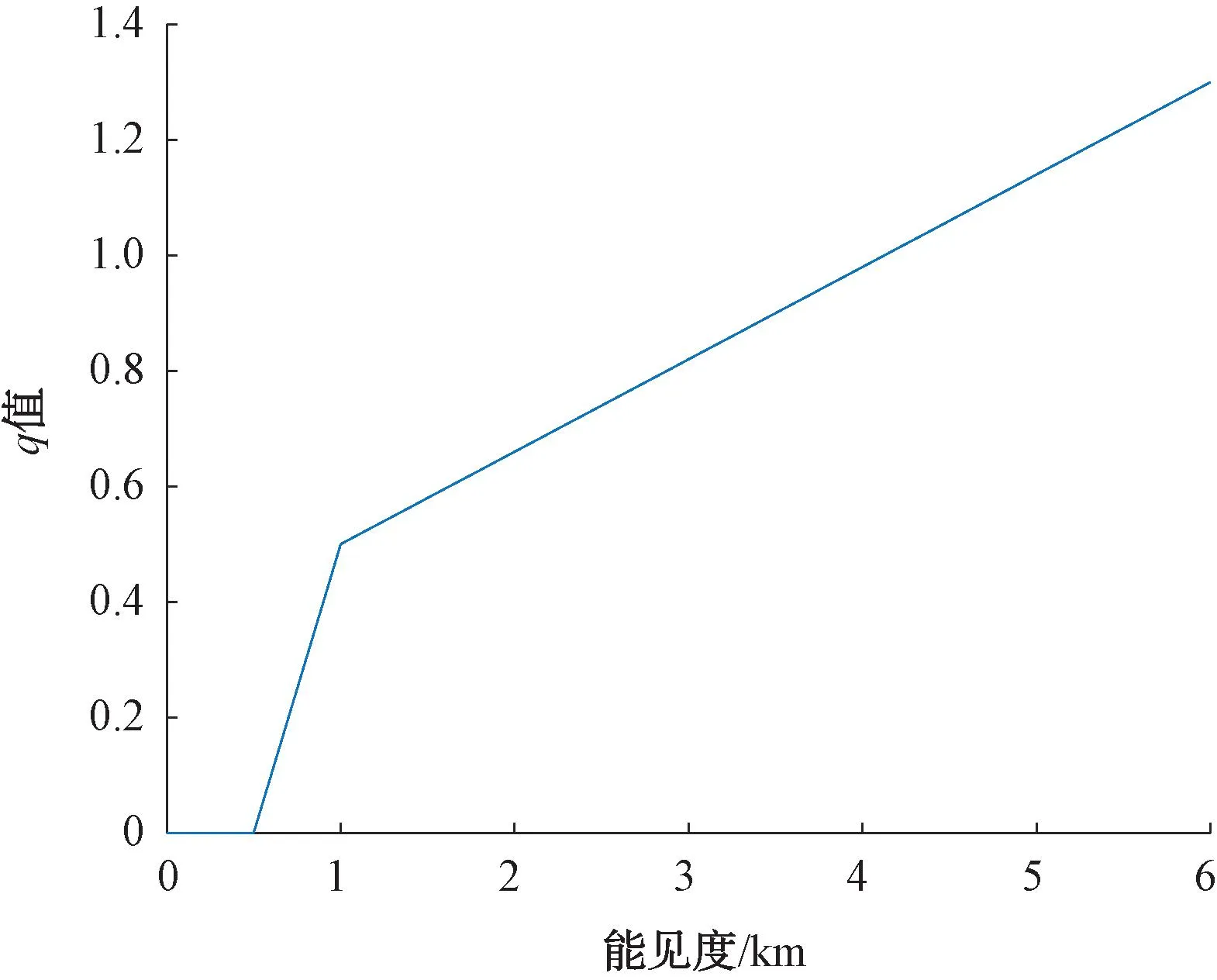
图9 q值仿真曲线
进一步,结合式(13)与式(15),可计算一般气候条件下的大气衰减系数,大气衰减系数曲线如图10所示。
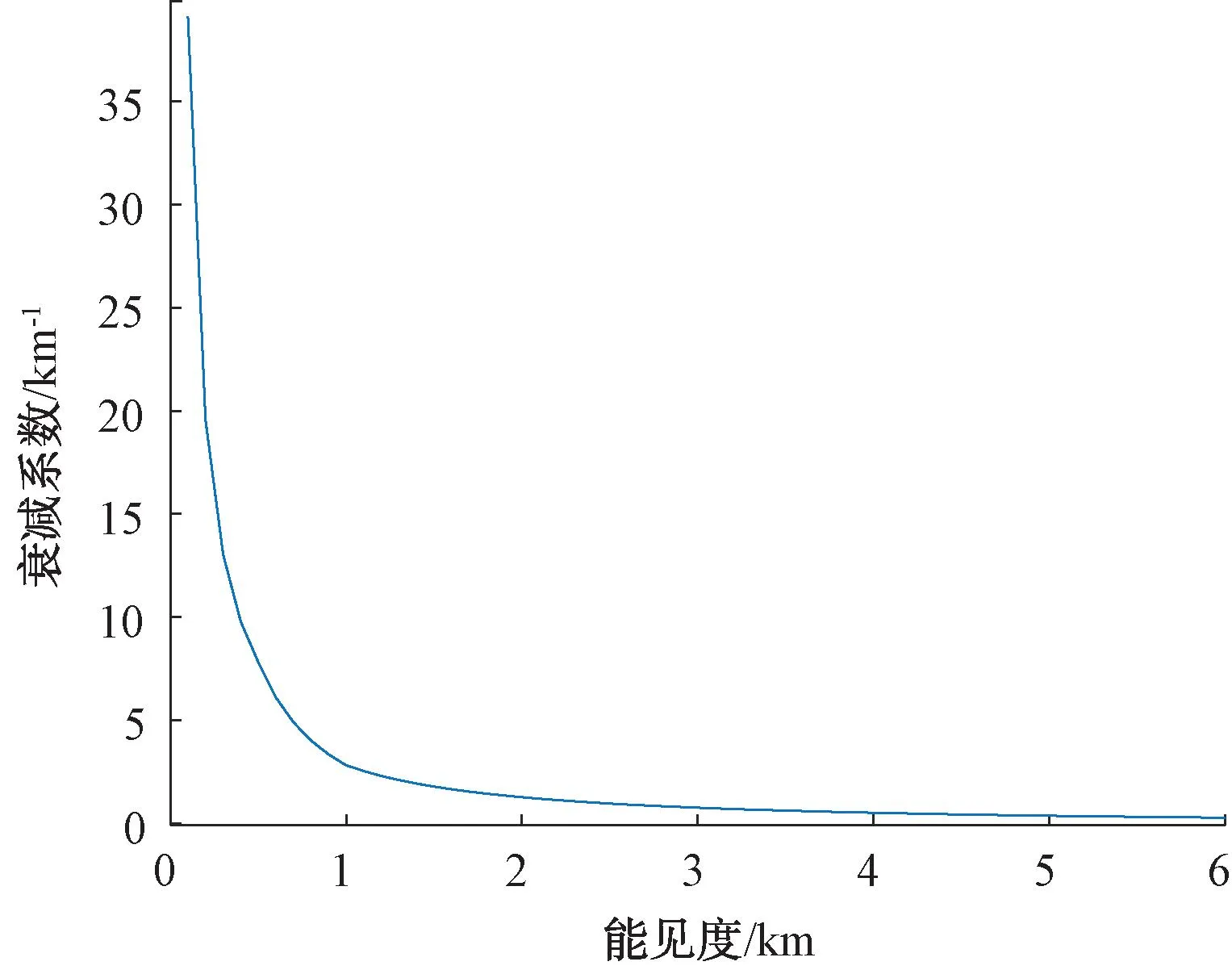
图10 衰减系数仿真曲线
根据计算出的不同能见度下的大气衰减系数,取能见度分别为:0.2 km、0.5 km、1 km、3 km、6 km,得到对应的大气衰减系数分别为:19.56、7.824、2.818、0.761、0.278。将计算出的大气衰减系数代入式(11)可求得激光传输的大气透过率,图11为不同能见度情况下大气透过率与激光传输距离之间关系曲线。
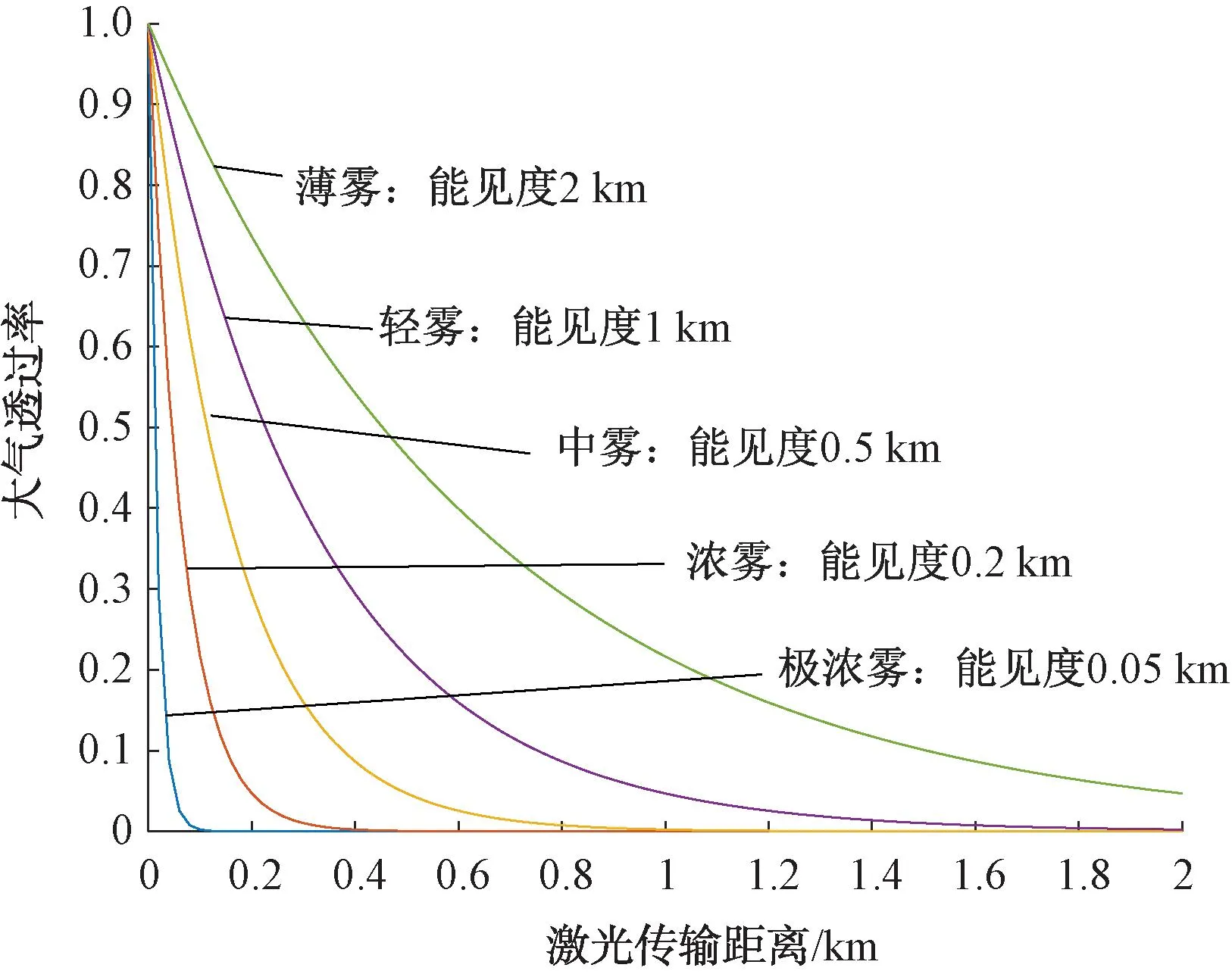
图11 不同天气条件大气衰减系数
2.3 背景光与噪声干扰
激光雷达接收目标回波信号的同时,还被动接收了背景光干扰信号,此外还需考虑探测噪声和各类放大器噪声,这些干扰与噪声都是影响激光雷达探测目标的因素。
探测器噪声主要由信号光散粒噪声、背景光散粒噪声、暗电流噪声和热噪声等组成,各类放大器噪声主要体现为热噪声[4]。
探测器的噪声等效功率如下式所示:
(16)
式中:ec为元电荷常数;B为接收机带宽;Ids为探测器表面暗电流;Idb为探测器体暗电流;Ib为背景照度电流;Is为信号电流;M为探测器倍增因子;F为探测器的额外噪声常数;i为探测器电流响应度。
Is和Ib可由下式计算:
Is=iPr
(17)
(18)
式中:ρ为背景平均反射率;hsun为背景辐射照度;Tr为接收系统的光学传输效率;ra为接收机的光学孔径;θfov为接收机视场;Δλ为光学滤波带宽。
放大器的噪声等效功率为:
(19)
式中:k为玻耳兹曼常数;T为绝对温度;N为噪声因子;RL为负载电阻。
进而可求得接收机的总噪声等效功率:
(20)
接收机噪声一般属于高斯加性噪声,其噪声方差即为Ptotal的平方,其接收机输出的回波信号功率可为:
(21)
3 仿真与分析
激光雷达工作过程为:系统生成信号并发射,在大气中传输一定距离,照射目标并反射,目标回波信号在大气中传输同样距离后,被接收系统接收并转化为电信号、数字信号,最后进行处理。
所以激光雷达信号建模需主要考虑以下几个方面:(1)激光雷达信号形式,(2)激光雷达方程,(3)激光大气衰减,(4)激光雷达接收系统噪声等。表1列出了激光雷达系统主要参数以及典型值,在仿真过程主要以典型值代入进行计算[5]。
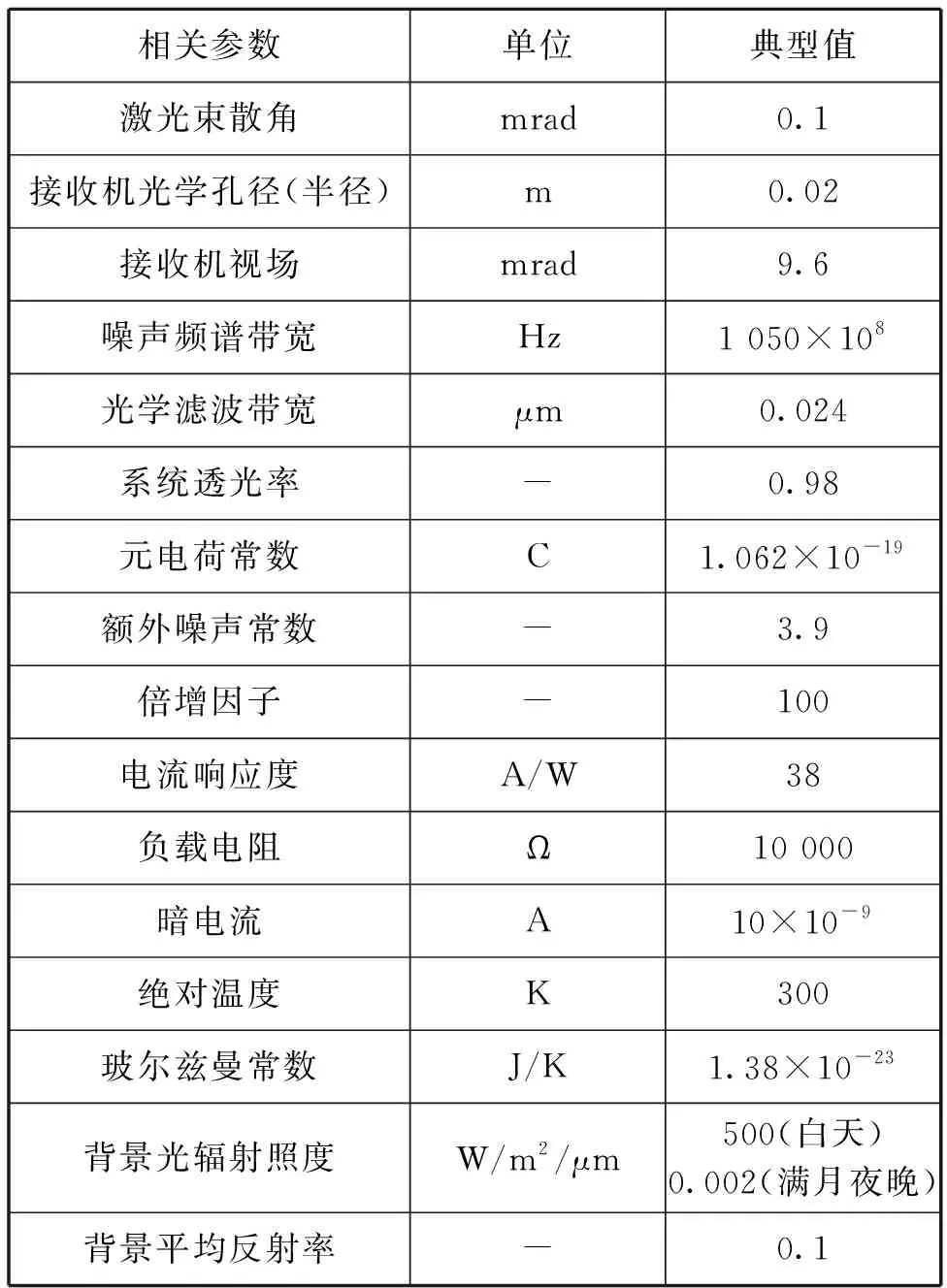
表1 激光雷达系统主要参数
在2.1节与2.2节中,已较详细讨论了激光雷达方程与激光的大气衰减问题,本节将结合表1中所列激光雷达系统参数,对目标回波功率进一步细化研究。
当激光雷达发射功率Pt为200 mW,目标发射率为0.6,目标散射立体角为2π时。并讨论一般大气条件下取能见度分别为:0.2 km、0.5 km、1 km、3 km、6 km的情况,此时计算出的大气衰减系数分别为:19.56、7.824、2.818、0.761、0.278(单位km-1)。目标回波接收功率曲线如图12所示。
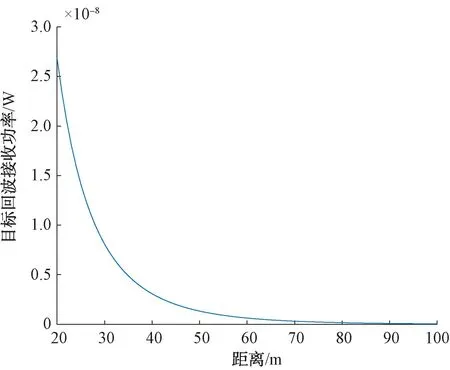
图12 目标回波接收功率曲线
若发射信号选择“0”“1”调制的13位巴克码,发射信号的脉冲重复周期为10 μs(脉冲重复频率100 kHz),目标与雷达距离为50 m,能见度分别为0.2 km、6 km情况下,目标回波接收功率分别为:1.33×10-9W、9.15×10-9W。在此条件下回波信号时域仿真图如图13、14所示。
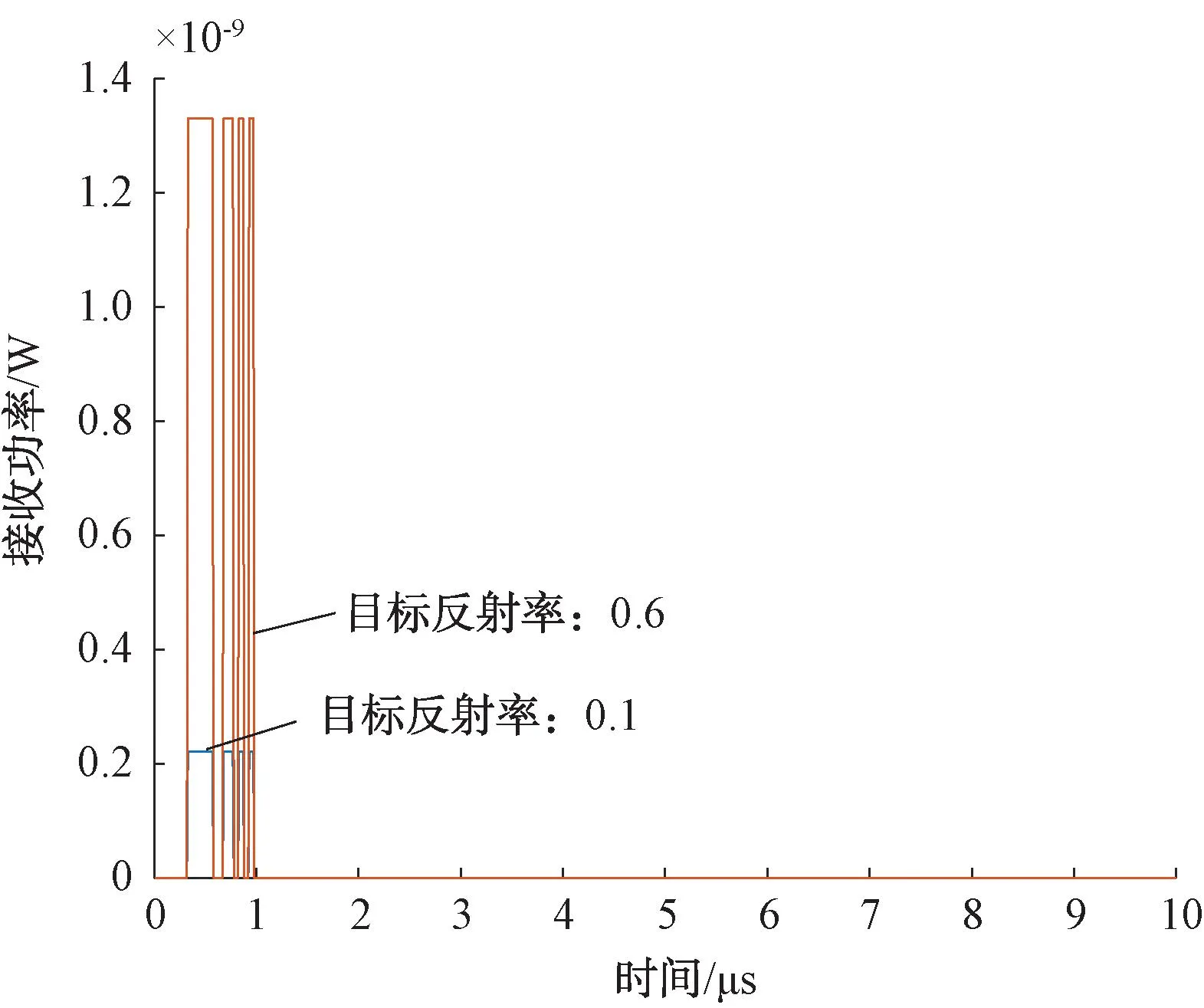
图13 目标回波信号时域仿真(能见度0.2 km)
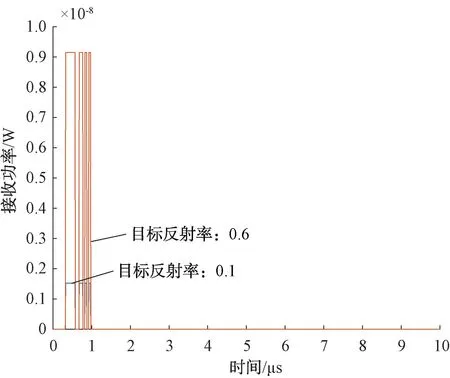
图14 目标回波信号时域仿真(能见度6 km)
激光雷达系统噪声为加性噪声,根据求得的不同仿真条件下的信噪比,可将激光雷达接收时域信号图绘制如图15、16所示。

图15 接收信号时域仿真(发射功率2 W,SNR=0.6 dB)
如图15所示,当回波信号信噪比较低时,目标回波信号无法分辨;随着回波信号信噪比升高,如图16所示,目标可被检测,但距离分辨率较低。

图16 接收信号时域仿真(发射功率8 W,SNR=6.6 dB)
若将图15所示回波信号进行数字脉冲压缩处理,脉冲压缩结果如图17所示,目标回波信号相对电平与距离分辨率提高明显。
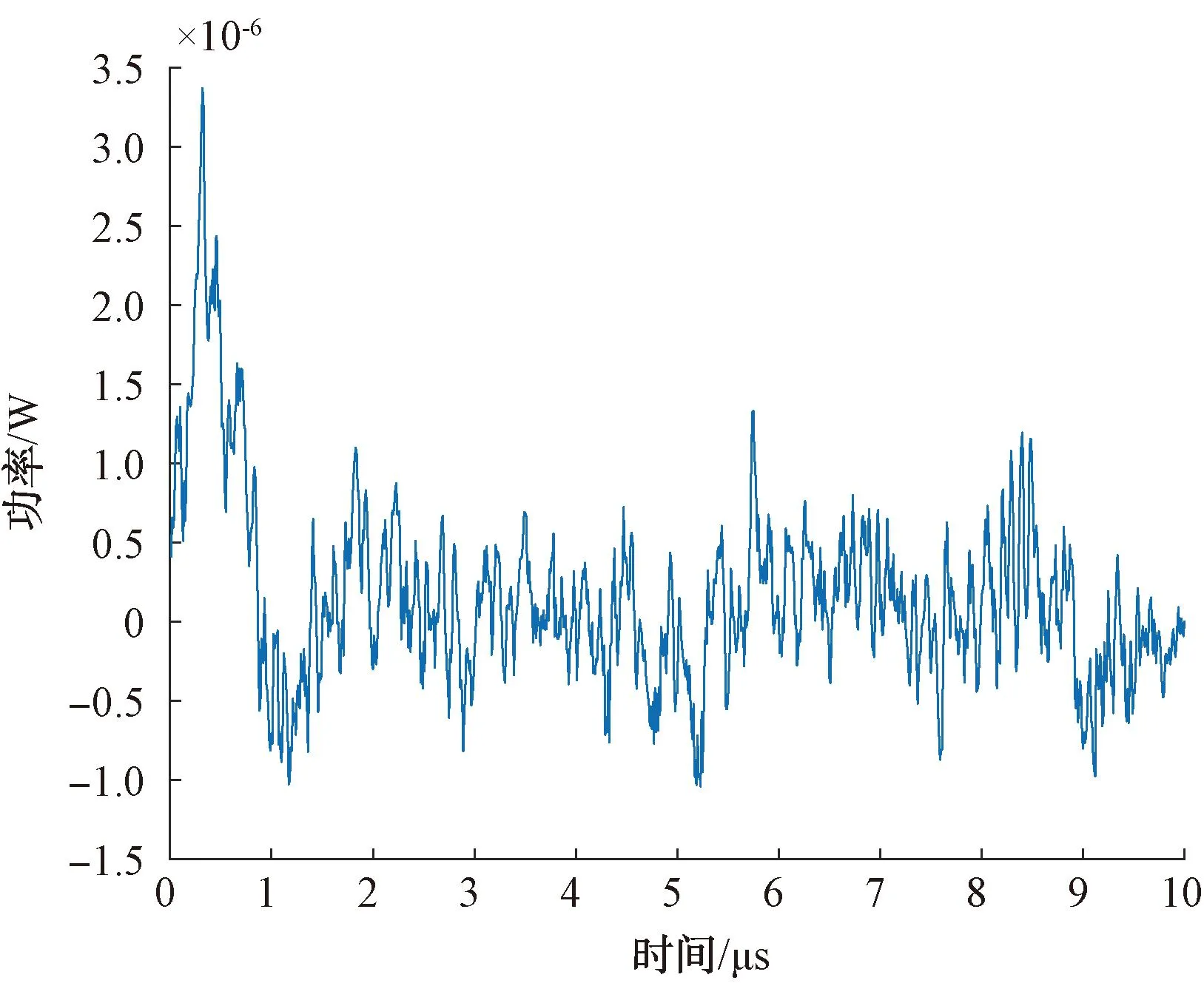
图17 接收信号脉压结果
为检验激光雷达系统在特定条件下的检测性能,设计10 000次蒙特卡洛实验,以普通矩形波信号非相干激光雷达做对比,其检测某同一目标的检测概率曲线如图18所示。在信噪比较低时,约-10~-15 dB区间内,2种激光雷达检测概率都较低,低于10%,此时矩形波信号非相干激光雷达探测概率略高于本文研究系统。当信噪比高于-10 dB时,本文涉及系统的探测性能提升迅速,其探测概率明显高于矩形波信号非相干激光雷达;在信噪比约为3 dB时,本文研究系统检测概率接近100%,探测性能较好。
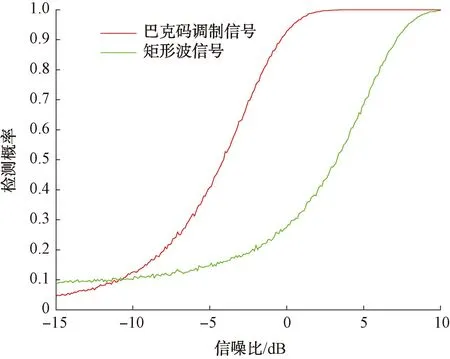
图18 检测概率曲线
4 结束语
本文设计了巴克码调制的非相干探测激光雷达发射信号,并依此设计改进了适用于该信号的激光雷达系统。综合考虑激光雷达距离方程、大气衰减、背景光干扰以及噪声等因素后,对雷达接收信号进行建模仿真,进而对数字信号进行脉冲压缩处理与恒虚警检测。
相比矩形波发射信号,本文所设计的激光雷达系统与发射信号经数字脉冲压缩处理后,其信噪比提高明显,有利于改善激光雷达在低反射率目标与大气能见度低等情形下信噪比过低的问题。
后续可在本雷达系统建模仿真基础上进行目标检测与参数估计算法实验,以期进一步提高本激光雷达系统性能。
猜你喜欢
北京测绘(2022年5期)2022-11-22
疯狂英语·新读写(2021年9期)2021-11-23
疯狂英语·读写版(2021年9期)2021-11-01
疯狂英语·读写版(2021年8期)2021-09-17
汽车观察(2021年8期)2021-09-01
中学生英语·阅读与写作(2021年2期)2021-08-02
中国交通信息化(2019年1期)2019-03-26
无损检测(2018年11期)2018-11-28
电子制作(2018年16期)2018-09-26
现代测绘(2018年5期)2018-02-18