基于Arduino 的智能共享充电系统的设计与实现
2024-01-10 10:08李洁李亚飞刘乙
机器人技术与应用 2023年6期
李洁 李亚飞 刘乙
(国网江苏省电力有限公司苏州供电分公司,江苏苏州,215004)
0引言
19世纪末以来,汽车工业的发展对人类社会的发展产生了重大影响[1]。有关数据显示,2024年全球汽车产量将达到7761万辆,2024年全球电动汽车保有量将超过3100万辆,新能源汽车取代传统能源汽车已经成为一种趋势[2-3]。大规模、多数量场景的电动汽车充电会面临诸多问题,例如电池型号的适配、充电桩用户信息共享等等,都影响着电动汽车的充电安全性和充电效率[4]。本文提出了基于Arduino的智能共享充电系统,通过分段式充电策略和电池管理系统提高充电效率。测试表明,本系统能够快速响应充电申请,进行高效安全充电,同时可以容纳多用户的并发请求,有效解决了大规模、多数量场景的电动汽车充电问题。
1 整体方案设计
如图1所示,智能充电系统主要由智能充电、防盗报警和计费管理三大模块构成。智能充电模块通过充电控制算法,对电池型号进行识别,对充电过程进行控制,保证充电安全,并与控制中心进行用户数据交互。防盗报警模块通过识别充电时的异常情况(例如,充电枪非正常拔出等),进行断电处理和信息上报。计费管理模块通过电量统计计算充电费用,并通过无线射频识别(RFID)自动识别车辆所属的用户信息进行付费。
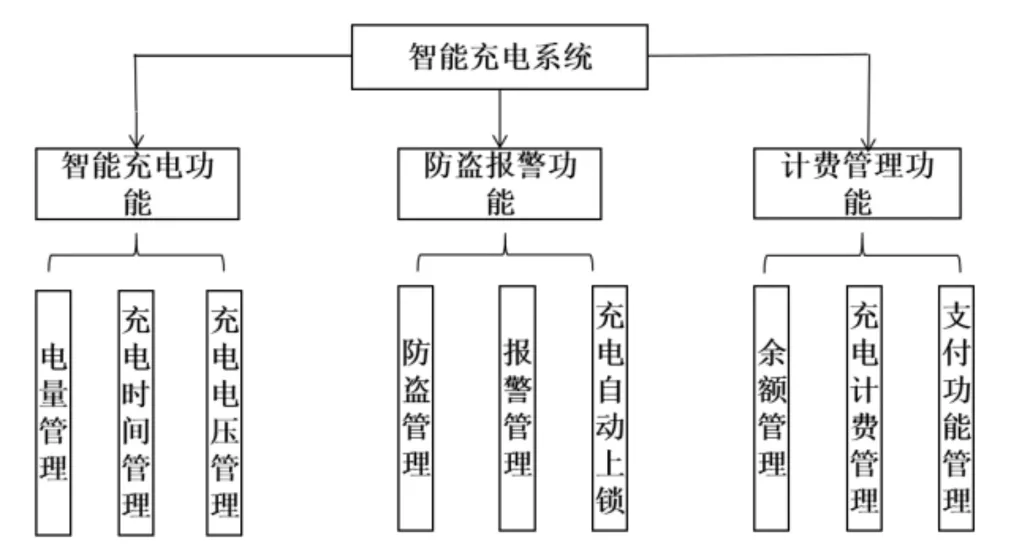
图1 整体方案功能图
2电池快速充电算法
2.1电池快速充电原理
蓄电池可接受的最佳充电电流特性曲线随时间的延长呈指数递减[5],表达式如下:
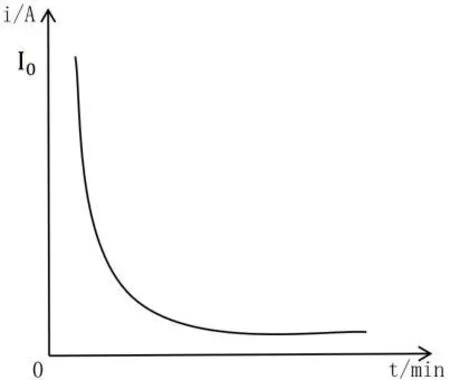
图2 蓄电池最佳充电电流特性曲线
为了实现最高效率的充电,马斯发明了三定律[6-7]。马斯三定律成为快充技术的理论基础,其表达式如下:
2.2充电方法设计
目前市面上比较成熟的主流充电方法主要有四种,分别是恒流充电法、恒压充电法、脉冲充电法以及反射式充电法[8-9],其优缺点如表1所列。
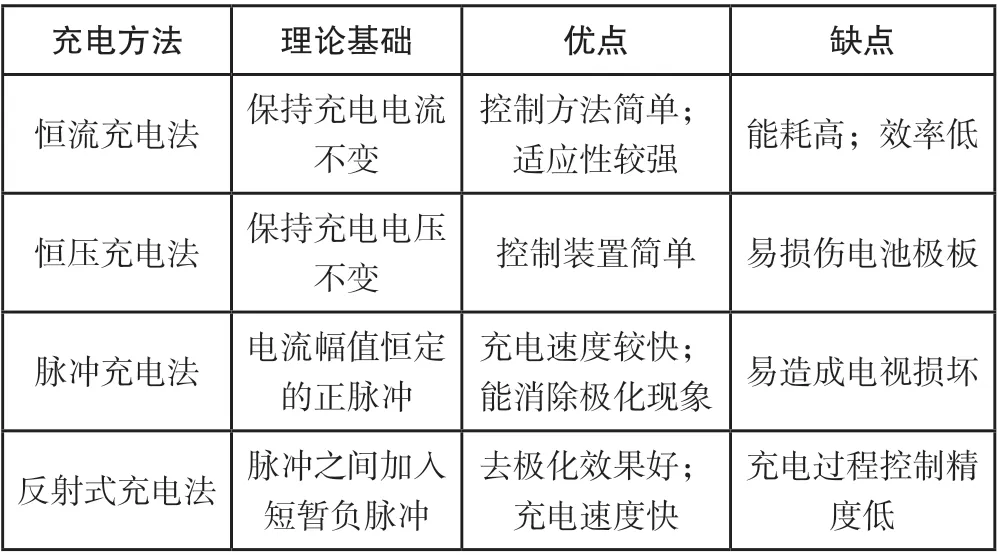
表1 主流充电方法比较
本论文提出的充电管理算法通过融合电池管理系统(BMS)对各类电池信息,包括电力类型、容量以及电池健康状况(SOH)等进行上传,在充电数据库中将上述参数准确代入,并与当前电池对应的标准充电曲线进行计算,最终生成三段式充电模式。当电池剩余容量(SOC)小于15%时,采用小电流恒流充电模式;当SOC 在15% ~85%时,采用分段横流充电;当电池SOC 大于85%时,采用恒压脉冲充电。在充电过程中,通过BMS 并根据充电数据库中的值与电池实时的电压电流状态计算获得电流、电压值。分段式充电策略曲线如图3 所示。
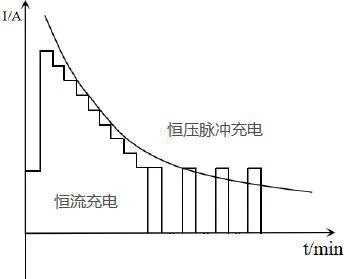
图3 分段式充电策略曲线
2.3软件功能设计
2.3.1充电控制端设计
软件系统的主要功能是接收用户输入,评估是否正确进行适当的操作,与控制中心进行通信和交互,并将电气信息发送回充电控制器收集的能量到控制中心。系统上电后会执行信息获取程序,向上位机发送指令,上位机接收指令后进行处理,然后将数据信息通过下位机传递给用户,因此可以获取充电线路上的电流信息。充电控制端的设计流程如图4所示。
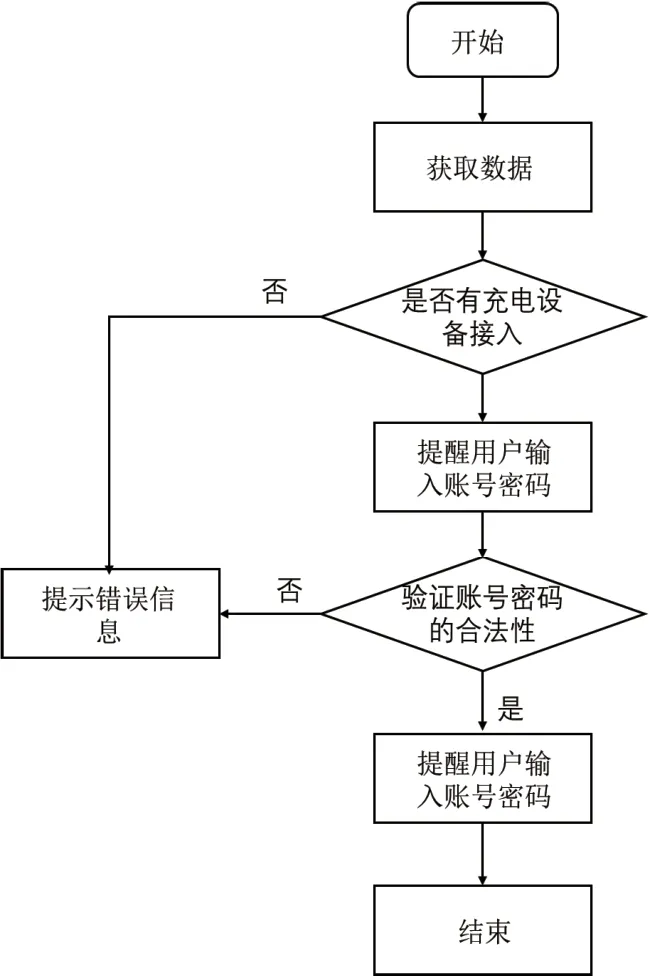
图4 充电控制端的设计流程图
2.3.2控制中心端软件设计
上电后,控制中心循环运行程序,持续接收负载控制终端的信息输入。当读取到用户当前的收费费用时,将会从用户的账户中提取信息,完成整个计费流程,实现过程如图5所示。
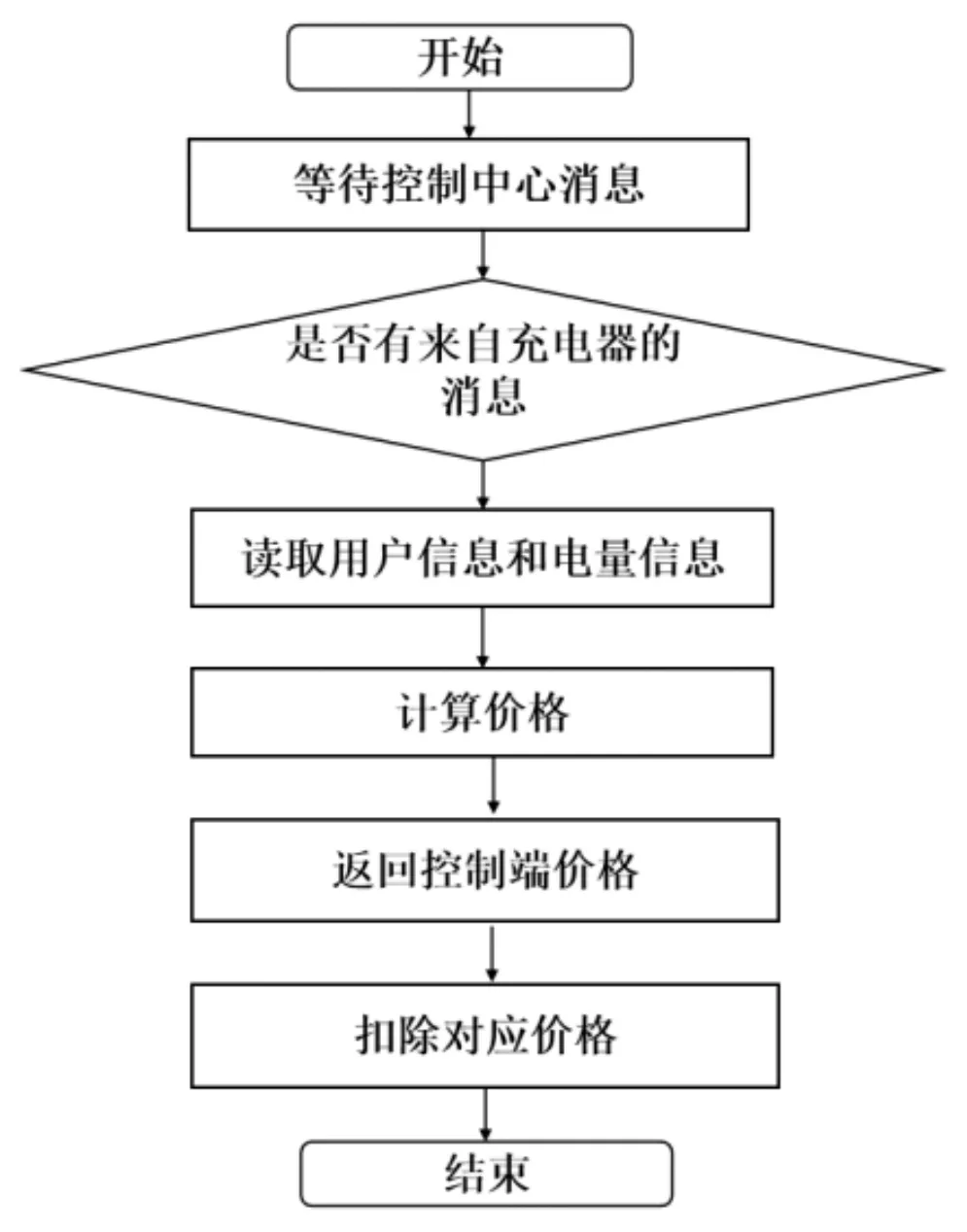
图5 控制中心端软件设计流程图
3系统测试与应用分析
为了证明本文设计系统的有效性,笔者搭建了模拟停车场,并部署了智能共享充电系统,通过对测试数据的分析,验证了智能充电系统在停车场中能够对大规模、多数量场景的电动汽车进行充电管理。
3.1充电指令响应测试
充电指令响应测试的目的是验证系统的用户端、充电数据中心和充电控制端之间在不同并发数量下的应答响应正确率和信息准确率。实验环境中设置了5台充电桩作为控制终端,通过CAN(控制器局域网)总线与数据中心相连,数据中心的服务器通过Internet与一台用户终端进行通信。为了模拟批量用户的操作请求,用户终端将以软件脚本的形式下发充电申请等指令,通过软件脚本可以模拟多个用户同时或者依次对充电桩下发指令,实现对系统的批量用户操作的测试。5台充电控制终端会预先设置好不同时间段的充电状态信息,在接收到充电请求后,会将当前的充电状态反馈给用户界面,用户界面将记录下反馈的信息,并与预先设置的充电状态进行比对,从而验证系统交互的效率和准确率,如表2所列。
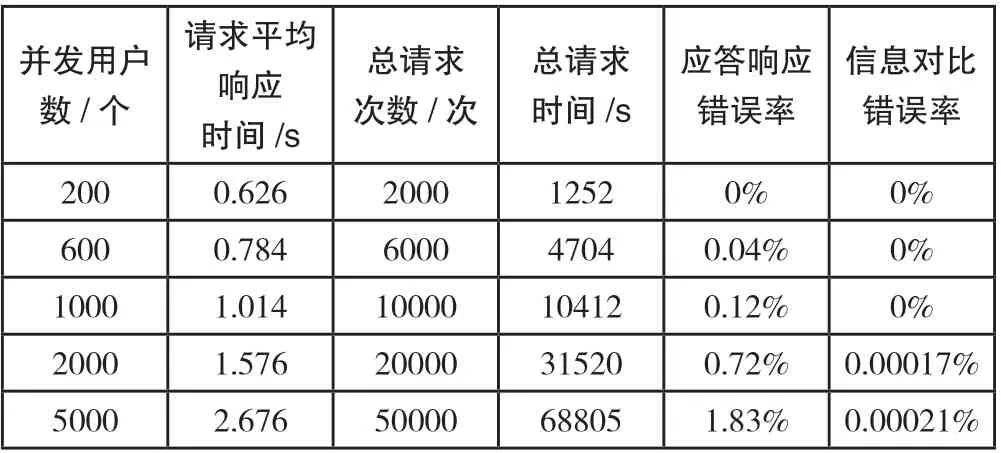
表2 快捷充电页面请求结果
通过表2的测试结果可以看出,当用户并发数量较少的情况下,系统的性能表现优秀,应答响应错误率为0,随着并发请求数量的提高,应答响应错误率上升,在并发用户数为5000个的条件下,应答响应错误率达到1.83%,但是信息对比错误率为0.00021%,接近于0,说明系统在高并发数量下仍能正确传输充电信息,系统性能表现良好。
3.2 充电启动响应测试
充电启动响应实验的目的是测试充电桩在接收到充电指令后响应充电执行的启动时间。实验方法是记录充电桩接收到充电指令的时间t1和电池进入充电模式的时间t2,计算t1和t2的时间差,获得充电桩的启动时间,本次实验重复进行10000次指令下发,统计充电启动时间,结果如表3所列。
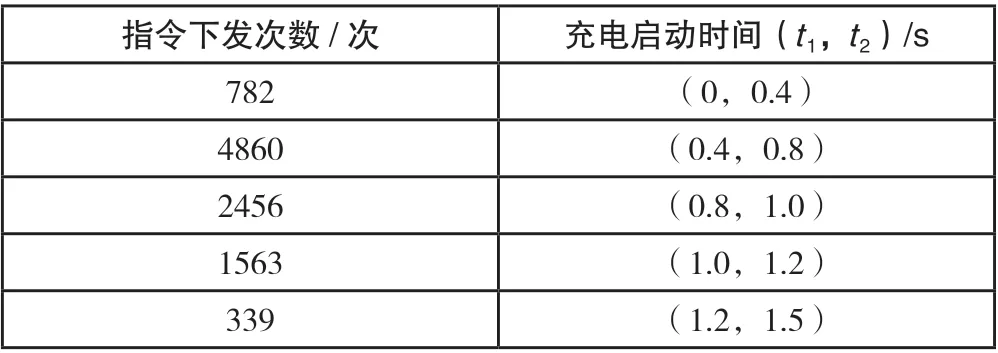
表3 充电启动时间结果
通过记录10000次充电启动时间,可以看到大部分的启动时间在1s以内,少部分在1 ~1.5s的时间内。在重复10000次充电指令下发测试中,充电启动时间大多数是集中在[0.4, 0.8]区间内,均值为0.6s,基本能够满足用户的需求。用户能够在交互界面上实时查看充电的状态,并且控制充电完成。
3.3 静电抗干扰实验
静电对充电桩的影响较大,为了测试其静电抗干扰能力,笔者使用静电发生器对充电控制端进行静电防护实验[10]。实验方法为使用充电桩给单体锂电池进行充电。每次充电前将电池放电至电压2.5V;采用分段式快充法充电直到电池电压达到3.2V;记录在不同时刻下的电池电量;同时对充电控制端的金属机身进行5kV的静电放电干扰,记录其充电状态变化,并且保障测试结果准确性;进行10次重复实验,记录将电池充满电量的时长,进行比较。不同充电时间电池的电压如表4所列。
实验结果表明,10次静电放电测试后,智能充电桩依旧可以正常充电,整个充电过程很顺畅,没有出现卡顿、死机等现象,并且充电状态能够实时反馈在用户界面上。
通过对系统的多方位测试,可以验证本论文提出的智能充电系统符合功能要求,性能稳定且操作方便,能够满足高并发条件下的充电管理需求,达到了预期的设计目的。
4 结束语
本设计将传统停车场和自动化实时信息跟踪设计结合在一起,针对当今常见的电动汽车成本管理问题提出了合理的解决方案。该智能充电系统分为用户端、收费控制终端和控制中心终端。三者相结合,解决了监控用户和汽车充电各类情况下的难题。该系统无需使用高成本的监控设备,具有成本低的特点。此外,采用无线射频识别技术,当电动汽车停在停车场时,智能充电系统会自动识别并设置车辆及用户信息,具有高度随机性,确保系统的安全性。在支付方面,用户可以通过实时通讯支付功能,更加便捷地于应用端实现在线充值,省去了传统支付方式中繁琐的支付过程。目前,大多数充电系统仅在硬件层面满足用户的充电需求,而无法达到便利性、低成本、高效性和安全性共存的要求[11]。这种基于物联网核心技术的智能电动汽车充电管理系统解决了大部分此类问题,适合在日常生活中广泛应用。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30
小哥白尼(趣味科学)(2022年2期)2022-05-25
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
科学大众·小诺贝尔(2016年11期)2017-01-10
海外星云(2016年17期)2016-12-01
创新作文(小学版)(2016年16期)2016-11-11
发明与创新(2015年1期)2015-02-27