
基于可视化的果树移栽机作业特性研究
2024-01-09 09:46:46李喆时底慧萍
农机化研究 2024年4期
李喆时,底慧萍,李 倩
(1.石家庄理工职业学院,石家庄 050228;2.石家庄财经职业学院,石家庄 050000;3.河北传媒学院,石家庄 051430)
0 引言
随着我国果品业的发展,水果种植面积和水果产量均已跃居世界第一[1]。移栽是水果栽种必不可少的环节,不仅可以有效避免水果幼苗遭受干旱、冻伤等,而且可以使幼苗良好地生长[2-3]。但是,目前我国的移栽作业主要采用人工或者半自动移栽机械设备完成,劳动强度大,移栽成活率低,亟需发展自动化移栽机械[4]。
为了提升果树移栽机的机械化水平,我国加强了技术投入和技术创新,主要措施包括:研发能够适应不同作业环境的果树自动移栽机,以提升设备的使用效率;研发通用机架,增加设备的使用频率,同时提高互换性;增加机械设备的多样性,使其能够实现制钵、育苗和移栽功能的有机结合。虽然移栽机的自动化水平得到了显著提升,但在作业过程中由于无法准确地识别损坏的果树苗以及待移栽果树,导致移栽过程仍然需要进行人眼识别,移栽准确率和移栽效率无法达到要求。
机器视觉技术是近年来发展起来的一门学科,利用计算机模拟人的视觉功能,将光转化为电信号,再利用成像技术对图像进行处理,从而得到有用的信息并输出。将机器视觉技术应用于自动果树移栽机,可以有效替代人的作业过程,对损坏的果树苗以及待移栽果树进行识别[5],从而提高移栽效率和移栽成活率。
1 硬件设计
1.1 总体设计
果树移栽机是在多功能果树移栽机的基础上,结合农业工作者要求研发的集松土、开沟、移栽和覆土于一体的新型果树移栽机。果树移栽机的主要组成包括控制系统、机器视觉和传感器系统、旋耕装置、开沟部件、覆土装置、移栽装置和传输系统。

图1 果树自动移栽机的主要结构示意图Fig.1 The main structure diagram of fruit tree automatic transplanting machie
1.2 控制系统
移栽机的控制系统主要包括计算机和PLC,用于对移栽机的整个作业过程进行控制,是移栽机实现自动化和智能化的软硬件沟通平台。计算机内部的控制软件通过对其他系统的反馈信息进行分析,确定下一步动作指令并发送至PLC,进而控制相应系统动作执行,最终完成移栽任务。
1.3 机器视觉和传感器系统
机器视觉和传感器系统主要用于对果树苗的位置和质量进行识别,以及时部分发现并剔除坏苗。其中,机器视觉系统主要包括CCD摄像头、图像采集卡和图像处理器等部分。同时,在计算机内部搭配图像处理软件,通过算法利用图像数据判断坏苗,并利用位置传感器确定坏苗位置信息,发送至控制系统;由控制系统发出指令,自动剔除坏苗[6]。机器视觉系统进行果树苗识别的过程如图2所示。
传感器系统主要包括位移传感器、光电传感器等,用于识别和定位树苗,保证移栽准确率。
1.4 旋耕装置、开沟部件和覆土装置
为了提升移栽机的功能性和自动化水平,在移栽机的基础上增加了旋耕装置和开沟部件,用于保证移栽时土壤的状态适宜果树苗的栽种。
旋耕装置的组成主要包括刀片、刀盘和旋转刀盘,用于将土壤充分地细碎。在作业时,旋转刀盘在在动力的驱动下旋转并前进,带动刀轴切入土壤,切下的土块抛起并与后方挡土板撞击,使土块进一步碎裂。
开沟部件的组成包括开沟刀、挡土板及拐臂,用于将旋耕装置碎裂的土分向两边,其作业效果对果树苗移栽起到了重要作用。开沟部件的结构简图如图3所示。
覆土装置用于在树苗移栽完成后将树苗表面的土壤进行覆压,其作业效果会影响树苗移栽后的成活率[7]。覆土装置的主要组成包括镇压轮、钢架和螺杆。
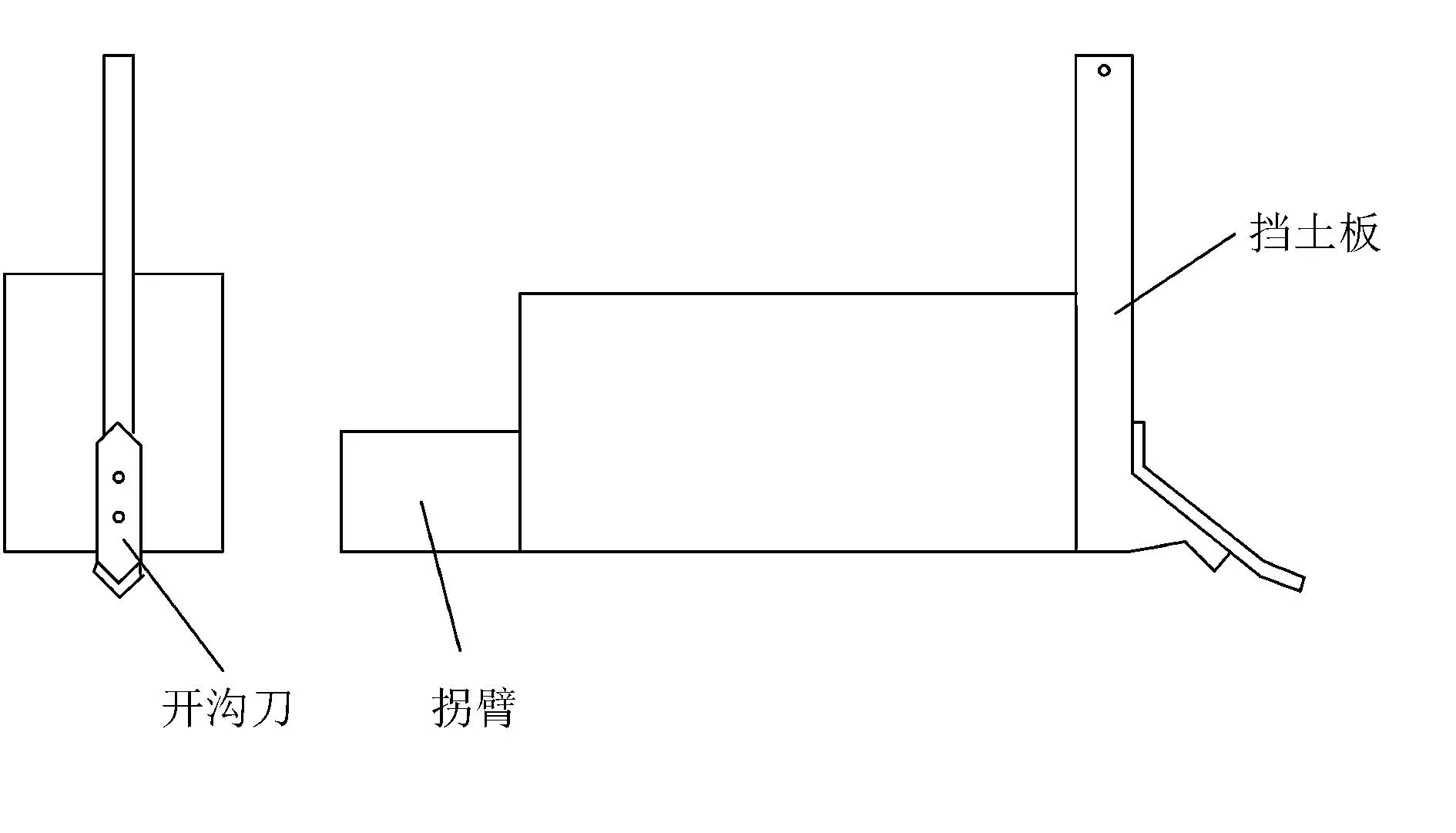
图3 开沟部件结构简图Fig.3 The structural sketch of ditching component
1.5 移栽装置
移栽装置用于将树苗夹取并移栽至种植区域,主要包括驱动装置、步进电机、斜楔块和移栽机械手。
1)驱动装置主要用于驱动移栽机械手的运动。为了保证移栽机械手的位置精度和对速度的控制,采用步进电机驱动的方式控制。但是,这种驱动方式也增加了移栽机械手段的总质量,同时控制过程相对复杂。为了实现对机械手的控制,还应增装丝杠和斜楔块用于将动力传递给机械手。
2)移栽机械手采用4指扁平铲状手指的方式,可以保证机械手的结构稳定,同时抓苗稳定。设计时,手指的尺寸需要保证其在张开后大于穴盘中苗坨尺寸,同时小于穴孔尺寸。
3)斜楔块用于在移栽机械手张开时撑开手指。
1.6 传输系统
传输系统的组成包括传动带和传送带电机,主要用于传输穴盘,其位置一般位于移栽装置的下方,便于移栽装置对树苗的拔出和移植。
2 移栽作业特性研究
要实现果蔬移栽机的自动化运行,保证树苗移栽的质量,主要需要解决两方面的问题:一是移栽机械手的结构能够适应不同树苗的特性(如柔软、不规则等),保证移栽过程不损坏树苗;二是移栽前能够准确地根据图像确定是否存在坏苗,及时剔除。因此,主要针对以上两方面对自动移栽机的作业特性进行研究。
2.1 移栽机械手几何参数设计
移栽机械手的作业对象为树苗,为了确定机械手的最优结构参数,关键是要分析其作业过程的运动轨迹和对树苗的作用力。机械手在作业过程中,树苗的受力如图4所示。
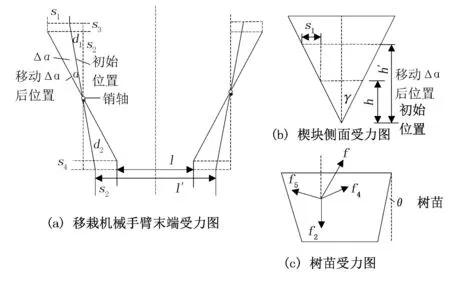
图4 移栽机械手作业过程中树苗的受力图Fig.4 The force diagram of sapling in transplanting manipulator operation process
通过对图4(a)分析可知:移栽机械手末端和前端在水平方向移动的距离s1和s2计算公式为
s1=d1sin(α+Δα)-d1sinα
s2=d2sin(α+Δα)-d2sinα
其中,d1和d2分别为移栽机械手末端和前端与销子的距离;α和Δα分别为机械手初始进入树苗的角度和手指绕销子的角度。其中,Δα计算公式为
其中,h′和h分别为树苗在作业结束和初始时的位置高度;γ为斜楔块的下角角度。
移栽机械手末端和前端在竖直方西移动的距离s3和s4分别为
s3=d1cosα-d1cos(α+Δα)
s4=d2cosα-d2cos(α+Δα)
通过对图6(b)进行分析,可以确定移栽机械手的末端在水平方向移动距离s1还可通过下式表示,即
机械手闭合时,前端间距l计算公式为
l=l′-2s2=l′-2[d2sin(α+Δα)-d2sinα]
其中,l′为机械手前端的初始间距。
移栽机械手从放下树苗的状态到闭合状态需要的脉冲数量pn计算公式为
其中,p为丝杠可运动距离;b为单位距离步进电机旋转角度。
移栽机械手与树苗之间的摩擦力f计算公式为
f=f1+f2=μ(f3S+f4)
其中,f1为土壤自身滑移产生的摩擦力;f2为土壤自身粘结力产生的摩擦力;f3为树苗受到的粘结力;f4为移栽机械手在法向方向受到的力;S为树苗的面积;μ为摩擦因数。
由于土壤与树苗之间的粘附面积较小,因此土壤自身滑移产生的摩擦力可忽略不计。由此可以确定移栽机械手对树苗的作用力在水平和垂直方向的平衡方程为
f5cosθ+μf4sinα=f4cosα
f5sinθ+f4sinα+fcosα=f3
对其求解可以得到移栽机械手受到的法向力f4、树苗栽植穴孔对树苗的力f5、树苗与移栽机械手之间的摩擦力f分别为
2.2 作业图像处理过程设计
为了根据图像信息剔除坏苗,需要对采集的图像采用形态学图像处理方法对图像处理,使其能够真实地反映树苗真实的根系残缺或外漏程度。采用形态学图像处理方法对图像处理的公式为
M′={[(M⊕N1⊕N2)°O·S]⊗T}∘R
按照式中的要求,需要对图像M进行以下处理:
1)将灰度化处理后的图像M进行N1的膨胀操作,使图像的边缘处连续;
2)对图像进行第2次的膨胀操作N2,去除图像中的“空洞;
3)对图像进行O开运算,使图像变得平滑;
4)进行S闭运算操作,以去除移栽机械手和树苗的突出部分,提高树苗检测的准确率;
5)进行T腐蚀处理,将膨胀处理区域进行放大,恢复图像面积;
6)对图像进行R开运算,消除图像细小部分,使图像更为平滑。
3 试验结果
为了验证该果树移栽机的性能,需要对其进行试验验证。考虑到该移栽机主要对其移栽机械手的结构和图像的坏苗识别进行了优化,因此试验设计时主要进行树苗的移栽试验和基于机器视觉的坏苗识别试验。
3.1 机器视觉识别坏苗试验
试验对象为苹果幼苗,长度约为50~58cm。随机选取苹果幼苗30株,首先使用人工方式确认坏苗数量,再使用果树移栽机的机器视觉功能进行坏苗识别,自动剔除坏苗。试验其进行4次,结果如表1所示。
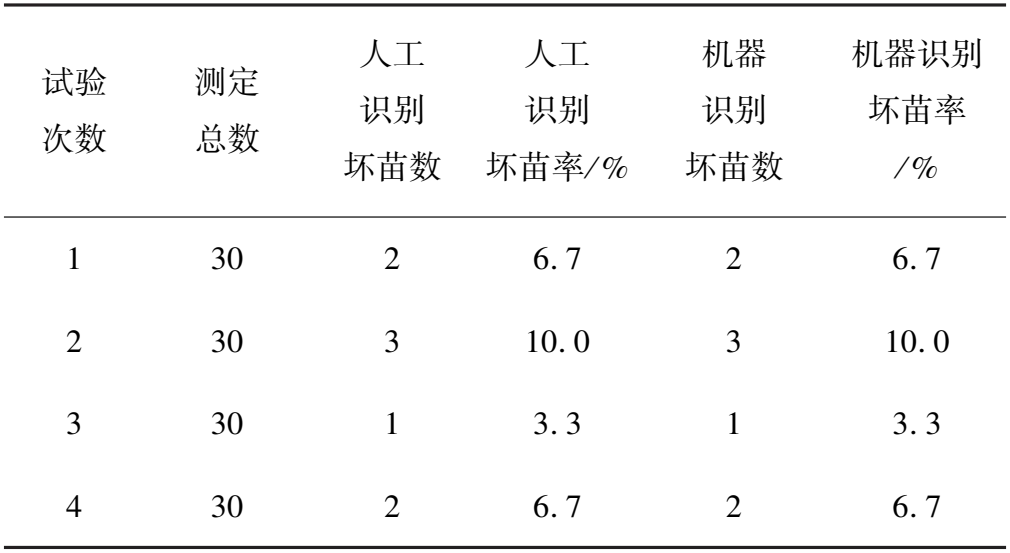
表1 机器视觉识别坏苗试验结果
由表1可知:果树移栽机的识别结果与人工识别结果一致,可有效识别坏苗,并将其从树苗中剔除。
3.2 树苗移栽试验
树苗移栽试验的地点选取为石家庄市内的大棚内,将苹果幼苗移栽至较为柔软的湿润砂质土壤中,入土深度约为20~26cm。试验结果以移栽成功率、倒伏率、深度合格率和伤苗率作为移栽性能指标。选取已通过机器视觉识别的质量合格的苹果树苗进行试验,共进行4次,每次移栽数量为50株。试验结果如表2所示。
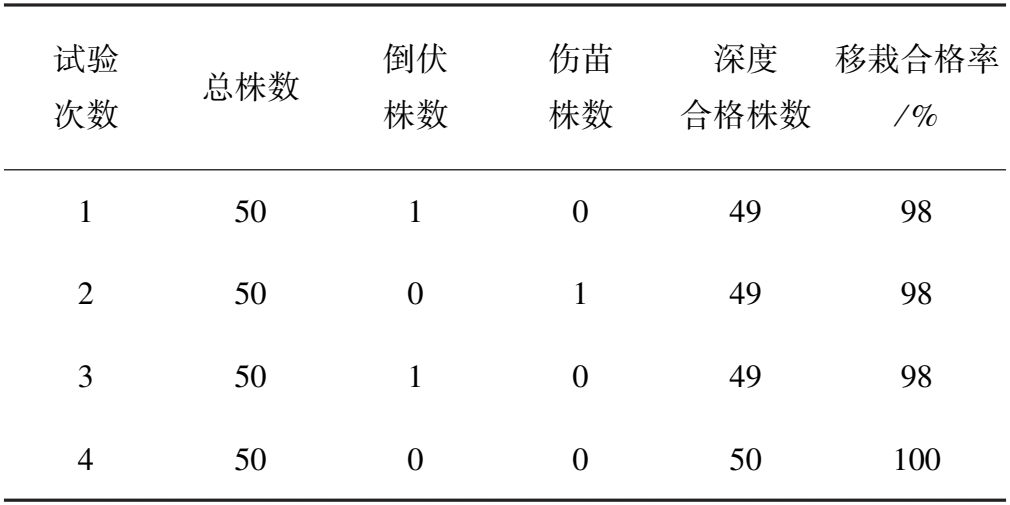
表2 树苗移栽试验结果
由表2可知,该树苗移栽试验的移栽成功率均大于98%,符合果农对于果树移栽机的性能要求。
4 结论
1)针对我国的自动果树移栽机的移栽准确率和移栽效率较低的问题,本文基于可视化技术对果树移栽机的作业特性进行研究。该果树移栽机的主要组成包括控制系统、机器视觉和传感器系统、旋耕装置、开沟部件、覆土装置、移栽装置和传输系统。
2)为了实现果树移栽机的自动化运行,保证移栽质量,本文针对移栽机械手的结构进行了优化,使其能够适应不同的幼苗,并对其作业特性进行研究。同时,对移栽作业的图像处理过程进行了设计,使其能够有效识别坏苗并剔除。
3)为了验证该果树移栽机的性能,对其进行了坏苗识别试验和树苗移栽试验,试验结果表明该果树移栽机可以有效地识别坏苗,并且高质量地完成树苗移栽。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
小学生学习指导(高年级)(2022年4期)2022-04-26 06:17:24
数学小灵通(1-2年级)(2021年11期)2021-12-02 01:30:16
数学小灵通(1-2年级)(2021年5期)2021-07-21 03:08:00
中阿科技论坛(中英文)(2021年2期)2021-03-17 02:40:42
农机化研究(2020年2期)2020-10-17 00:59:16
作文周刊·小学一年级版(2019年48期)2019-01-08 03:16:11
农机化研究(2018年8期)2018-07-10 11:39:26
通信电源技术(2016年1期)2016-04-16 04:57:29
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:02
