甘蔗横向种植机补种装置辊耙结构仿真分析
2024-01-09 09:46麻芳兰李尚平
农机化研究 2024年4期
麻芳兰 ,滕 筱 ,李 科 ,李尚平 ,吴 飞
(1.广西大学 机械工程学院,南宁 530004;2.广西民族大学 电子信息学院,南宁 530006;3.北部湾大学 机械与船舶海洋工程学院,广西 钦州 535011 )
0 引言
在过去几十年里,全球糖的生产和消费都在增长。其中,80%的糖是由甘蔗生产的,只有20%的糖是由甜菜等生产的。目前,我国甘蔗种植主要分布在广西、云南、广东、海南等地区,广西和云南作为最大的蔗区,占全国总种植面积的90%以上[1-3]。实践表明,将机械化技术引进到甘蔗种植中,可以有效提高甘蔗产量和种植质量[4]。
与人工种植相比,甘蔗机械化种植过程中易出现漏播、排种不均匀现象[5],直接影响到甘蔗种植的效率。针对漏种情况,国内外学者做了相应的深入研究。如国外研究者利用光电传感器技术、激光传感器技术等方法来测试甜菜、玉米等种子在播种过程中粒距的排种均匀性情况。国内则主要用高速摄影技术、光电传感器技术等来监测种子的排种状态[6-9],也有一些研究人员设计了相关的补种机构[10]。梁秋艳等利用机械臂式点位控制补种机构,并运用LabVIEW软件来提取漏种空穴的坐标,再采用组合算法的方式来实现精密补种[11]。葛世强等对于大籽粒作物出现的漏播问题,运用超越离合器的机械结构来把补种装置与排种器连接为一体,可以非常好地把补种装置和排种器快速分离和结合起来;利用激光传感器对作物进行漏种监测,出现漏种时用补种控制算法控制步进电机进行加速补种,同时设计了可视化的交互界来面对实际出现的补种情况进行检测和故障报警[12-13]。
笔者针对甘蔗横向种植机在实际作业出现的漏种问题,研制了一套补种装置,来实现种植机作业过程中的实时补种动作,以降低甘蔗种植过程中的漏种率及提高种植质量,并对补种辊耙结构进行仿真研究,对比分析不同机构之间辊耙所受的力、扭矩等因素,从而验证补种装置的补种性能。
1 补种装置的组成和工作原理
结构示意图如图1所示。

1.漏种检测装置 2.蔗种 3.提升机构 4.补种箱 5.支架柱:Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ分别为充种区、储种区、供种区、护种区、投种区 6.储蔗槽 7.余量不足检测装置 8.储种空间 9.导流板 10.补种辊耙 11.提升链槽
其工作原理为:当余量检测装置检测到补种储蔗槽中蔗种不足时,将信号传给提升电机,使其转动一定角度补足补种箱内蔗种;当漏种检测装置检测到蔗种排送带上无蔗种时,将漏种信号传到辊耙电机,电机动作一定角度完成排送带补种,从而实现动态实时、精确连续补种的目的,避免出现漏播现象。
2 仿真模型的建立
依据前面课题组的研究成果可知:蔗种的泊松比为μ=0.33,蔗种的弹性模量E=1531MPa,剪切模量G=575MPa。设置蔗种的弹性模量为1531MPa,泊松比为0.33,密度为1.1E-006kg/mm3,通过ANSYS软件进行网格划分,如图2所示。齿式补种装置的模型及实物如图3所示,整叶式补种装置的模型及实物如图4所示,窝辊式补种装置的模型及实物如图5所示。
参照ADAMS各种材料碰撞参数表中亚克力材料、橡胶材料、金属材料碰撞参数,适当增大刚度以减少穿透,增大阻尼以减少反弹,以此获得合理反映蔗种运动属性的仿真模型。宏文件中指定的接触力参数值如表1所示。

图2 甘蔗种柔性模型及实物图Fig.2 Sugarcane seed flexibility model and physical drawing

1.补种辊耙 2.补种箱图3 齿式补种装置的模型及实物图Fig.3 Model and physical drawing of a toothed replanting device

1.补种辊耙 2.补种箱图4 整叶式补种装置的模型及实物图Fig.4 Model and physical drawing of a whole-leaf seed replenishment device

1.补种辊耙 2.补种箱图5 窝辊式补种装置的模型及实物图Fig.5 Model and physical drawing of a nest roller replanting device
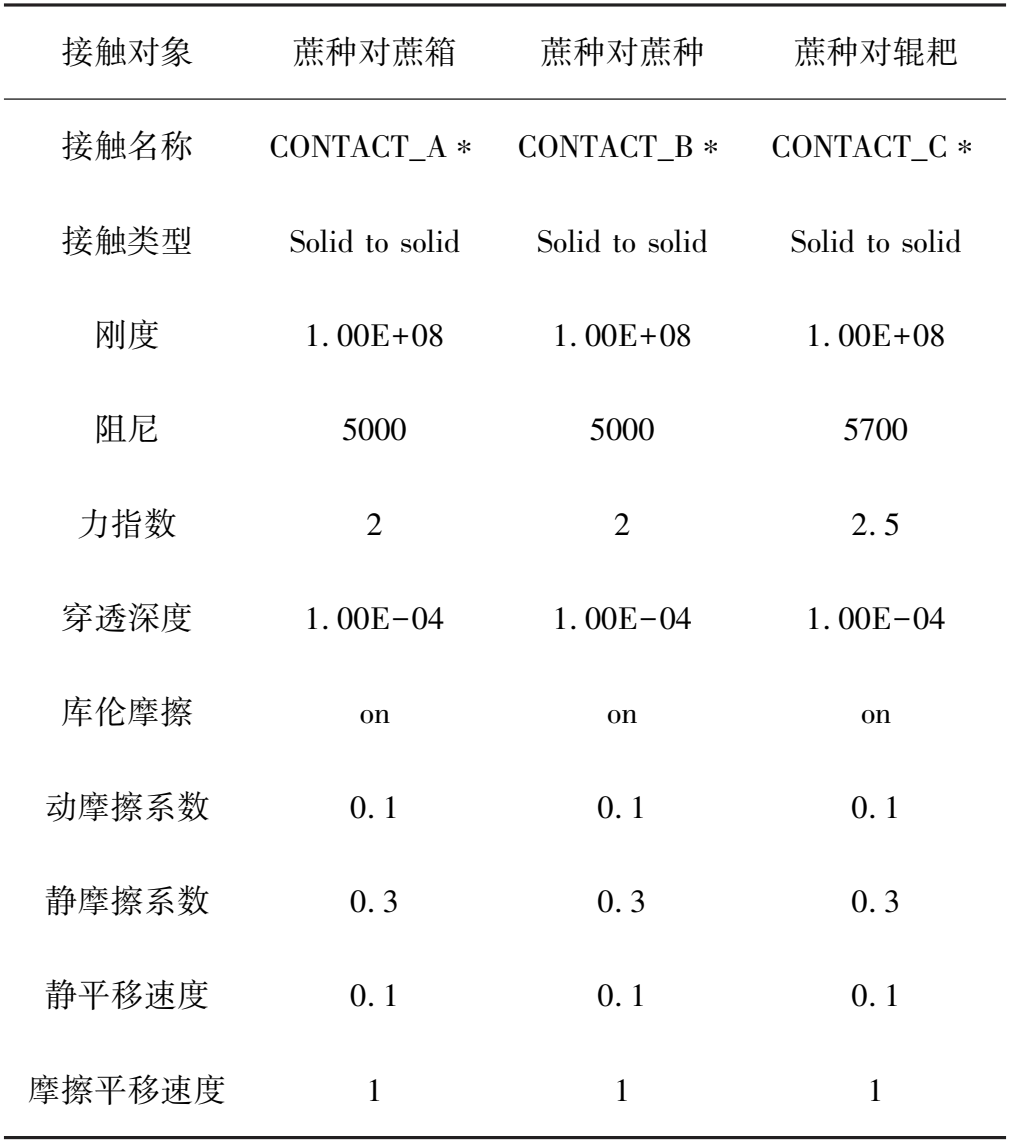
表1 接触力参数表
3 仿真结果分析
对ADAMS中的补种装置模型进行旋转约束、碰撞、重力等的添加,然后对结构进行运动仿真,最后对补种辊耙的力和力矩进行结果分析[14-16],如图6~图17所示。
3.1 齿式补种装置仿真分析(顺时针运动)
由图6、图7可知:齿形补种装置在补种时,力保持在30N左右,力矩保持在20N·m左右。

图6 力-时间变化曲线Fig.6 Force-time variation curve

图7 力矩-时间变化曲线Fig.7 Torque-time variation curve
3.2 齿式补种装置仿真分析 (逆时针运动)
由图8、图9可知:力在30N左右,力矩在12N·m左右。图7中0.2、1.75、3、4、5、6、7、8s附近均有出现力矩突然加剧的情况,这个与实际情况一致。在补种辊耙转动瞬间,需要将蔗种从补种箱导入辊槽中,辊耙所需提供的力矩很大,使整个补种箱内的蔗种发生整体运动,故这一瞬间力矩较大。

图8 力-时间变化图Fig.8 Force-time variation curve

图9 力矩-时间变化图Fig.9 Torque-time variation curve
3.3 整叶式补种装置仿真分析(顺时针运动)
由图10、图11可知:变化曲线比较一致,在开始瞬间辊耙的力和力矩加大(带动部分蔗种转动),在1s后辊耙正常工作;顺时针动作时,由于出现一个辊槽中夹持两根蔗种以及“堵蔗”现象所导致的力和力矩的加大,变化曲线类似正弦曲线,该情况与前面的理论分析一致。
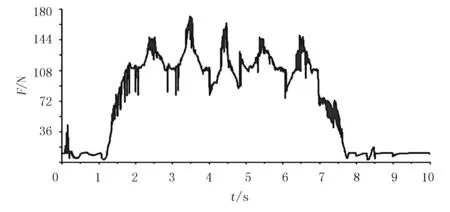
图10 力-时间变化曲线Fig.10 Force-time variation curve

图11 力矩-时间变化曲线Fig.11 Torque-time variation curve
3.4 整叶式补种装置仿真分析(逆时针运动)
由图12、图13可以看出:在刚开始瞬间,辊耙所受力和力矩急剧加大,可以理解为辊耙需要将蔗种整体带动所需力和力矩,故变化较大;在3s和8s瞬间,力矩和力突然加大,这是由于在蔗种到达辊耙上方时种箱的前挡板、蔗种和补种辊耙之间形成“堵蔗”现象所导致,故力在75N左右,力矩在10N·m左右。
3.5 窝轮式补种装置仿真分析(顺时针运动)
由图14、图15可知:所述情况与实际情况一致,每转动一个角度对应转动一个辊槽,辊耙的力和力矩都呈剧烈上升趋势。变化曲线呈正弦变化,力保持在14N左右,力矩保持在5N·m左右。

图12 力-时间变化曲线Fig.12 Force-time variation curve

图13 力矩-时间变化曲线Fig.13 Torque-time variation curve
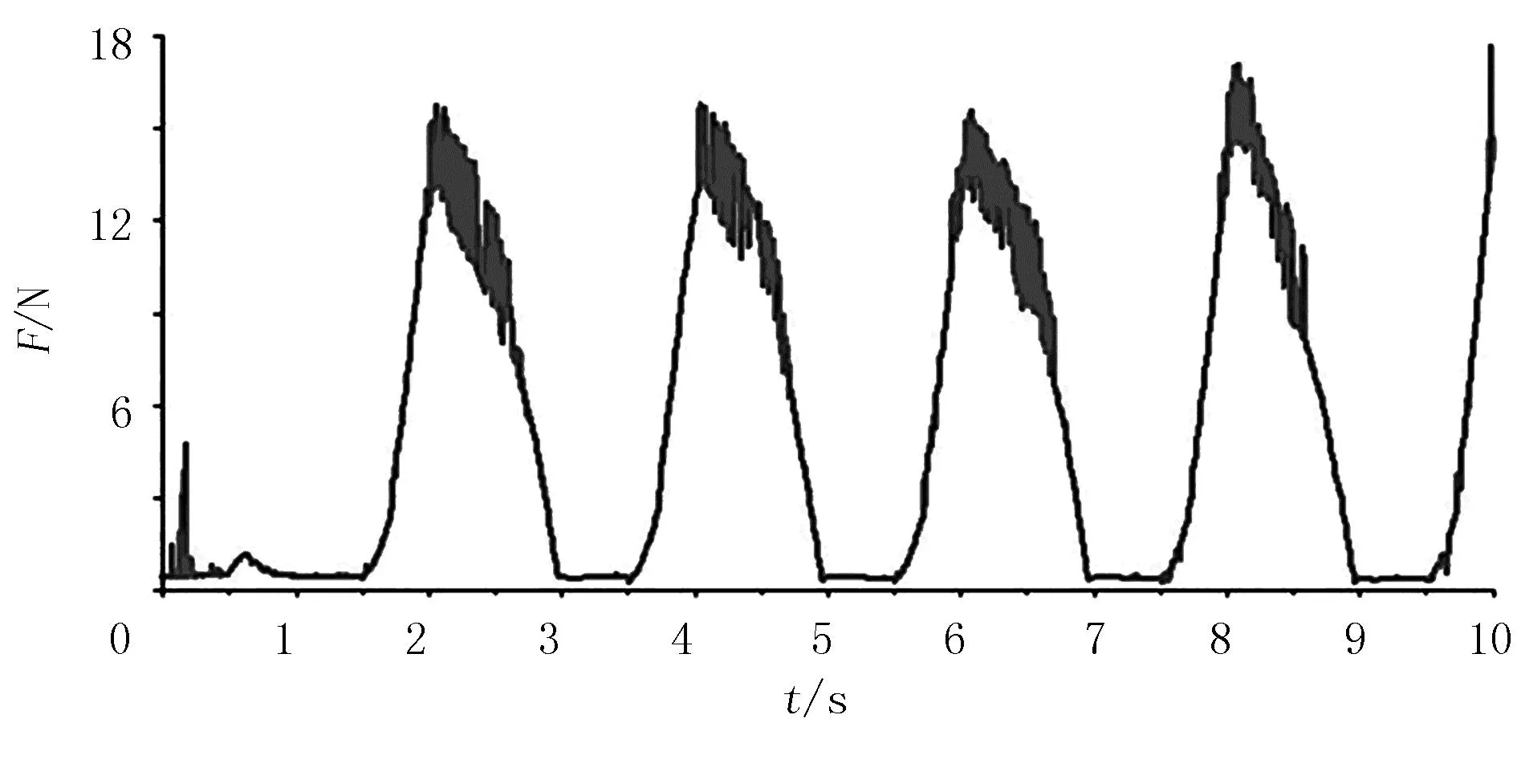
图14 力-时间变化曲线Fig.14 Force-time variation curve

图15 力矩-时间变化曲线Fig.15 Torque-time variation curve
3.6 窝轮式补种装置仿真分析(逆时针运动)
由图16、图17可知:力和力矩在开始瞬间需要比较大,之后力和力矩都比较小,且力保持在10N左右,力矩保持在2N·m左右。相比前面的方案而言,辊耙所受力得到了较好的改善。

图16 力-时间变化曲线Fig.16 Force-time variation curve
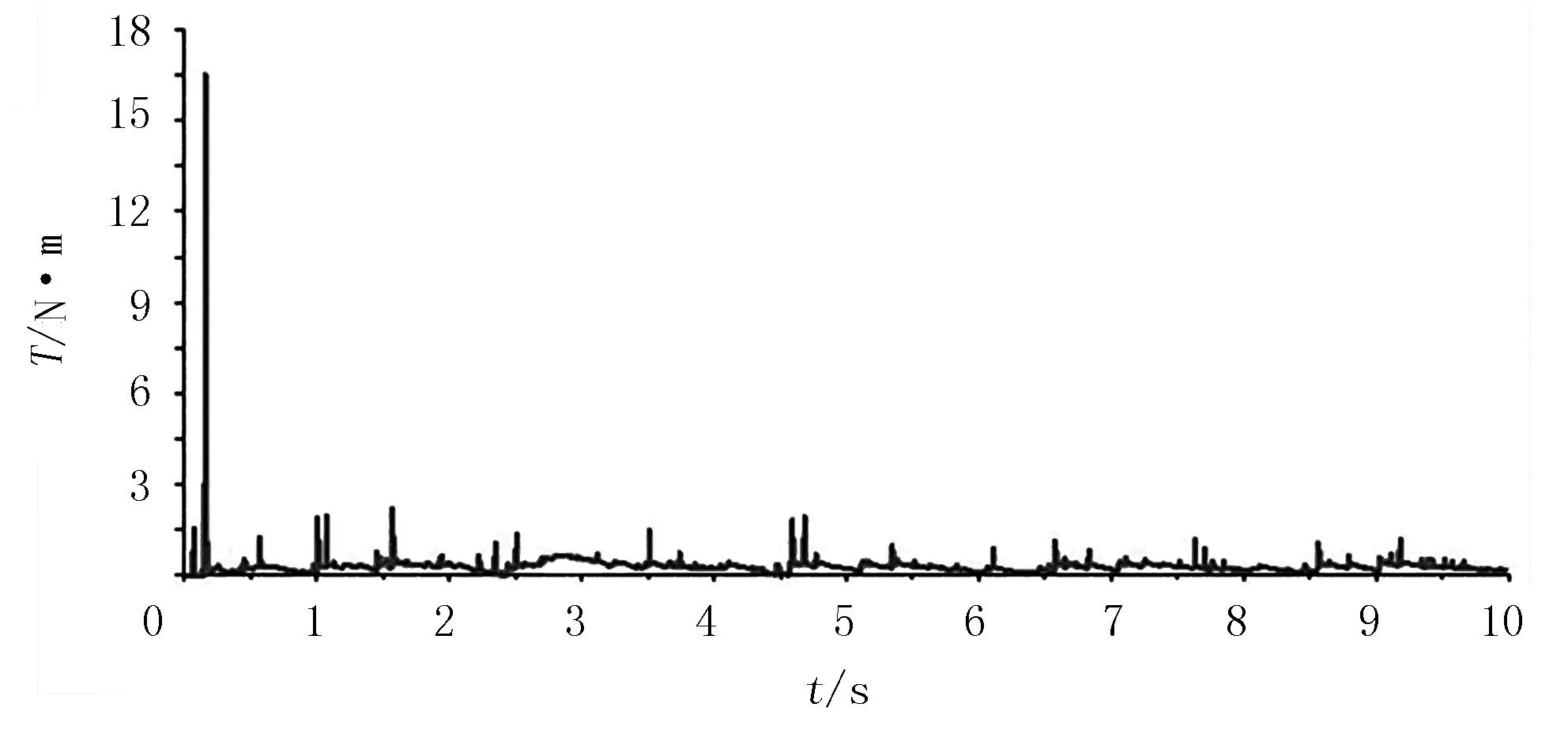
图17 力矩-时间变化曲线Fig.17 Torque-time variation curve
4 结论
1)通过将蔗种进行柔性化处理,以达到与实际情况一致的目的。利用ADAMS软件对补种装置的辊耙进行运动学分析,根据补种辊耙的力和力矩随时间的变化情况验证装置的补种性能,为后面进行轻量化、优化结构提供理论参考。
2)由理论和仿真分析得知:补种辊耙在逆时针转动的情况下,力和力矩都相对较小,逆时针转动方式更优于顺时针转动方式。3种结构中,窝轮式补种装置力和力矩都比另外两个装置小,窝轮式补种装置进行逆时针运动时力约为10N、力矩约为2N·m,其结构更优,补种性能更好。
猜你喜欢
儿童故事画报·自然探秘(2022年12期)2022-11-24
园艺与种苗(2022年6期)2022-07-13
基层中医药(2021年3期)2021-11-22
中华养生保健(2020年10期)2021-01-18
现代农村科技(2020年8期)2020-07-28
小猕猴学习画刊(2019年8期)2019-09-16
特别健康(2018年3期)2018-07-04
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
家庭用药(2016年5期)2016-05-14