农用无人机自动续航装置归中平台升降系统设计
2024-01-09 03:14赵振华韦丽娇陈晓垚沈德战郭昌进李兴贵陈永健
现代农业装备 2023年6期
赵振华,张 园,,韦丽娇,,陈晓垚,沈德战,郭昌进,4,李兴贵,陈永健
(1.中国热带农业科学院农业机械研究所,广东 湛江 524091;2.广东省农业类颗粒体精量排控工程技术研究中心,广东 湛江 524000;3.湛江市类颗粒体动力学及精准精量排控重点实验室,广东 湛江 524091;4.农业农村部热带作物农业装备重点试验室,广东 湛江 524091;5.东莞市典航自动化设备科技有限公司,广东 东莞 523129;6.佛山天源创新科技有限公司,广东 佛山 528000)
0 引言
近些年来,我国的农业机械化水平不断提高,无人机在农业领域得到广泛的应用,在无人机的发展过程中,由于电池电量的有效性问题,导致续航能力受到了极大限制,无法实现远距离飞行和超长待机飞行,这使得如何解决无人机电池的及时更换成为相关技术领域所要面对的首要问题[1]。为了解决这一问题,研制出一种基于农用无人机的自动换电续航装置,这将加快无人机作业效率和减少人工成本。随着无人机自动续航装置的使用率不断提高,而无人机续航装置作业平台的调平性能直接影响无人机换电的准确性和作业的安全性,对无人机续航装置升降平台调平性能的提高具有十分重要的意义。本文研究并设计了一种基于六自由度无人机的升降调平平台,在无人机以任意姿态降落时,可进行无人机的全方位调平和大行程升降,保障了无人机的稳定航行及平稳升降。
调平平台广泛应用于机械、船载、车载武器、空间遥感探测、公安消防、环境监测等领域。通过对调平运动机理的常规应用进行逆向扩展,将升降调平平台中的横向和纵向运动组合使用,控制平台恒定水平,可有效提高升降平台的稳定性。
1 调平系统国内外研究现状
在早期,调平技术主要用于导弹炮架车和雷达车等军用设备中,随着政治、经济和科技的不断发展,调平技术也被广泛应用于工程机械和民用生产等设备。
20 世纪中后期,许多的外国学者将调平技术应用到军用设备领域,二战期间所使用的战车和防空导弹发射架采用的调平技术为三点支撑式的手动调平法,该方法调平精度低,速度慢且系统稳定性差。随着计算机控制系统和液压传动技术的迅速发展,手动调平迅速被自动调平技术所取代,四点支撑和六点支撑也取代了三点支撑方式,但当时这2 种支撑方式都存在一些问题。二十世纪八十年代后期,电液控制技术已经不能满足发展需求,而此时迅速发展的机电控制技术被应用于调平技术中,调平的支撑方式较为常见的四点支撑、六点支撑的静定问题得到解决,以及增加了并联机构的方式[2-3]。进入21 世纪,调平系统的精度要求和稳定性要求也越来越高,随着数字化技术的逐步发展,相继研发出更高精度和集成的数字式交流伺服系统,新的计算机技术和调平控制算法也应用于自动调平系统中并完成调平动作,提升了调平系统的自动化水平以及适应复杂环境的能力[4-7]。
我国的调平技术研究起步相对较晚,直到上世纪90 年代才开始[8-10]。华中科技大学的SU 等[4]设计了一套使用高速调节开关调节阀控制的调平装置,通过实际应用验证了其有效性。盛英等[11]设计了一种针对重型机械且调平精度较高的调平装置。该装置采用电液伺服系统,利用Stewart 结构以6 个液压缸作为并联机构,通过分析计算将自动调平装置的液压结构进行简化,转为静定结构,并通过运动学和动力学的分析计算,得出了六点支撑式自动调平系统的调平算法和运动规划方案。
本世纪初期,我国对调平系统的精度要求和稳定性要求也越来越严苛[12-14]。林有才等[15]设计了一种液压调平系统应用在高机动性地面雷达上,采用高精度的水平误差检测仪器和误差反馈电路实现调平系统的闭环调节,同时采用电动手动并联和模块化系统设计,提高了系统反应速度和可靠性。李迪科等[16]对电液式调平系统与机电式调平系统,三点支撑与四点支撑进行对比,优选出一种四点支撑多单片机并联的机电式调平系统,在X、Y 这2个角度下的误差都相当小。何林立[17]设计了一种基于模糊PID 算法控制的四点支撑式重载调平装置,该算法能够有效地抑制振荡,使装置更快速、更平稳地达到水平状态。张鹏等[18]通过虚拟样机现代设计方法,对动力学模型进行了仿真和结构优化,得到了最优结构的高空作业平台的调平装置。
2 总体结构方案
2.1 设计要求
本文要设计的是无人机自动换电装置升降平台,当无人机在换电装置上方悬停时,升降平台接收到系统的信号将完成上升动作,等待无人机成功降落之后,归中装置使无人机停靠在停机坪的中间位置。完成夹紧动作,升降平台接收信号完成下降动作,升降平台需要具有很好的稳定性与安全性,为无人机换电提供稳定性和精准性平台支撑保障。
2.2 设计方案
本换电装置升降平台采用滚珠丝杆驱动的升降方式。升降结构包括伺服电机驱动、齿轮齿条副和丝杆等结构,其工作原理是以伺服电机为动力,通过做角运动的铰接副驱动框架进行直线运动,从而实现换电装置上升或下降的动作。其优点是构造简单、操作简便、运转高效、升降行程大,缺点是升降时的速度为非线性、稳定性差、操作时的各种参数较小,变速比难以控制、变速系统复杂等,这对变速装置的工作性能和使用寿命提出了更高的要求。在升降过程中,采用升降台与齿条组合结构,以满足升降要求,但由于其需要安装在固定支架上,而且对使用环境要求较高,因此其具有系统相对稳定性的优势。对于丝杆驱动的升降机构,使用丝杆可将旋转运动转变为直线运行,运动特征使平台完成上升和下降,它结构紧凑、体积小、噪音小、传动相对稳定,特别适合在大面积的微动平台上使用,设计合理,具备自锁功能。
2.3 升降平台结构
升降平台装置的总体结构主要由升降基座和滚珠丝杆升降机构、伺服电机驱动组件、归中校正机构组成,如图1 所示。

图1 升降装置总体结构
滚珠丝杆升降机构是升降平台的升降基座,该升降基座主要包括4 组滚珠丝杆组件、2 组伺服电机组件以及停机坪。升降平台由伺服电机驱动的上下滚珠丝杆升降装置作垂直运动。该设备可以任意方式停滞或滞留在自锁升降平台上,方便增加用于紧急手动升降的模块化手动装置。
归中校正机构可在无人机停放在停机坪上时,自动调整无人机的停放位置,保证无人机停放在停机坪的中央。在停机坪的顶端加装有2 组对向推送可呈“井”字型分布的横向推杆和纵向推杆,可被双轴步进电机驱动同步向内或向外移动,改变横向推杆和纵向推杆交错组成的矩形大小,从而使无人机的停放位置在停机坪上的居中位置。
升降调平平台与归中校正机构、滚珠丝杆升降机构以及无人机的总体衔接方案如图2 所示。升降调平平台的驱动传动组件为4 组折返式伺服电机。升降调平平台的传动组件包括上层的单轴铰链和下层的双轴铰链以及顶部的调平平台,与滚珠丝杆升降机构共用安装基座。调平平台通过驱动4 个伺服电动缸,能实现平台在空间运动的“升、降、停”3个姿态和“单向、对向、垂向”3 个平动位移,继而驱动横向推杆和纵向推杆同步向内或向外移动来调节平台水平方向,从而达到归中的目的,使无人机在特殊情况下降落受影响时,能够完成水平校正和稳定升降,保障了无人机的自动换电及平稳升降过程。

图2 总体衔接方案
2.4 工作流程
无人机自动换电装置升降平台的工作流程是由伺服电机提供动力,丝杆轴与螺母能够形成滚珠运行的轨迹,丝杆轴的转动使得滚珠沿着滚珠丝杆螺纹和螺母内所匹配的螺纹轨迹滚动,使滚动运动变为高效率的直线运动,进而带动升降调平平台作上下直线运动。其工作流程如图3 所示,主要工作过程是步进电机驱动器通过升降指令控制电机启动,从而实现调平平台的升降运动,通过电限位检测装置的反馈对电机的工作状态进行监测,同时为了防止步进电机烧坏而设置了过流保护。

图3 升降机构的工作流程
根据升降平台的功能实现,需要通过伺服电机带动齿轮实现丝杆轴转动,同时其余的丝杆同步转动,使得升降盘上下平移,从而联动升降平台上的归中校准机构平台上下运动。本次设计的平台采用4 根滚轴丝杆控制升降平台的升降动作,相比于其他数目的丝杆,4 根丝杆分布于长方形升降平台的4 个边角,在工作时同时转动,由于滚轴丝杆具有自锁的特性,使得每根丝杆都起到承受力的作用,同时确保导向平台作平稳的上下运动,保证了升降平台工作的平稳性,且具有更强的结构稳定性。
3 归中平台升降系统设计
3.1 电气系统组成
归中平台升降装置的电气系统主要由控制系统、检测组件和执行机构等组成,具体结构框架如图4所示。归中平台升降装置的升降系统是由CAN 控制器实现电气系统控制,在接收到无人机返航信号时,CAN 控制器通过CAN 总线传输信号至伺服电机组驱动自动调平平台升至预设无人机降落高度;当CAN控制器接收到无人机降落至自动调平平台并完全停稳的信号时,驱动丝杆滑块式升降机构开始下降,同时置于平台上的驱动伺服电机组全向调平控制单元对无人机进行校准调平;当升降平台下降至下限位的限位开关时,CAN 控制器接收到限位开关信号并暂停动作,检测组件(倾角传感器、位移传感器)无信号输出时,整体调平平台的升降系统部分任务完成。
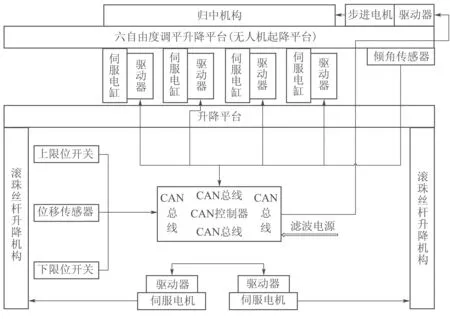
图4 电气系统框架
检测组件包括倾角传感器、位移传感器和上下极限位置的限位开关等硬件。其中倾角传感器是用于测量升降平台与水平面的X 轴和Y 轴的倾斜角数值,并将该值传递至CAN 控制器进行处理及控制;位移传感器是用于测量调平平台的位移距离数值并反馈给CAN 控制器;上下极限位置的限位开关是用于限制平台超行程运动以及当位移传感器出现故障时,紧急控制升降平台停止。
控制系统的核心是调平及升降运动控制单元。它根据倾角传感器回传的倾斜角数值,通过CPU 处理并转化为信号,控制伺服电动缸的运动,并对倾斜角数值的回传频率与伺服电动缸的响应频率进行耦合,达到对升降平台进行动态水平校正的目的。它还能根据位移传感器回传的平台位移距离数值,通过CPU 处理并转化为信号,控制伺服电动缸来驱动滚珠丝杆升降机构,使平台上升或者下降,达到对升降平台高度调整的目的。
执行机构包括伺服驱动器、伺服电缸和传动装置等,它用于支撑整个平台以及按照控制系统的指令完成对平台的升降和调平工作。
3.2 控制系统组成
控制系统为基于嵌入式控制的四点支撑自动调平的机电式调平系统,主要包括运动控制单元和检测组件,结构框架如图5 所示。调平平台工作时,倾角传感器和位移传感器将测量的数值信号回传到CAN 控制器,CAN 控制器通过CAN 总线将控制信号传达到运动控制器,调平升降平台有6 组伺服系统(4 组伺服电缸组和2 组伺服电机组)实现平台的自动调平和升降系统的控制,2 个步进电机控制归中校正。
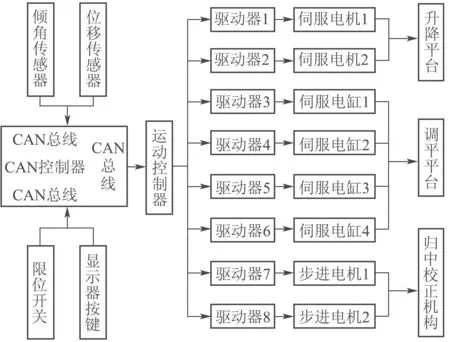
图5 控制系统框架图
检测组件由倾角传感器、位移传感器和上下极限位置的限位开关等组成。其中倾角传感器可实时测量升降平台与水平面的X 轴和Y 轴的倾斜角数值,能保持升降调平平台恒定水平。位移传感器设置了手动和电动这2 种控制方式,具有断电位置记忆功能。限位开关由上下2 个接近开关组成,用于上下极限位置电气安全保护。
运动控制单元包括CAN 控制器、CAN 总线通信、运动控制器、嵌入式操作系统及其控制软件。
3.3 软件系统设计
整个归中调平系统采用嵌入式控制软件,其程序主要包括人机交互系统,硬件初始化,自检程序,升降、调平、运动控制软件应用程序及驱动程序等,能够与无人机换电装置结合,完成无人机全程自动化作业。
控制软件的主要功能包括自检、CAN 通信控制、信号接收、工作监控、数据采集、驱动运动控制以及故障报警等,并且具有工作顺序安排功能,保证高效且迅速地完成任务。
归中平台升降系统控制流程如图6 所示,其中自检程序可对硬件和软件的功能和运行状态进行检测,当发现硬件或运行程序故障时,会自动发出警报并显示故障信息。在接收到降落信号时,控制系统会按照时序及逻辑控制完成全部工作流程,如当无人机飞至自动续航装置上空时,升降平台上升至最高点,待无人机降落完毕进行归中校正和调平平台,并下降至最低点准备换电。工作监控用于接收传感器回传的角度和位置从而确定平台的位置与状态,能够记录平台校正至水平状态的调整次数。运动控制系统能通过对运动学模型进行解析,计算出每个伺服电缸的移动距离和运动速度,再由运动控制器协同控制伺服电缸,完成1 次调平运动。各部分通过CAN 总线进行通信控制,将收集到的信息传递给CAN控制器进行梳理,并通过时序及逻辑控制完成工作。

图6 控制策略流程
4 结语
本文主要研究了无人机自动换电装置的归中升降平台的结构设计与控制系统软硬件的设计及搭建,目前形成了试验样机,且对无人机降落后的归中、调平、升降和换电的整个操作流程进行了试验,并通过优化无人机在自动续航平台内部的升降动作,最终使得归中平台升降系统实现静态或动态升降,保障无人机在升降调平平台的安全起降。本文针对无人机自动续航装置的设计实现进行研究,从归中升降平台的结构设计出发,开发了一套针对无人机自动续航装置升降平台实际应用场景的升降调平控制系统,该系统能够在接收无人机降落信号后控制平台完成归中、升降、调平动作,辅助无人机的自动换电工作,扩展了调平式运动平台的应用场合,更好地实现调平平台运动控制,也为实现无人机自动续航装置的升降调平动作提供了基础的控制原理与结构方案。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
汽车实用技术(2022年13期)2022-07-19
有色金属材料与工程(2021年4期)2021-11-27
汽车观察(2021年6期)2021-11-20
中国民间疗法(2021年5期)2021-06-09
橡塑技术与装备(2021年2期)2021-02-01
新能源汽车报(2020年32期)2020-09-27
机械工程与自动化(2020年4期)2020-08-25
新能源汽车报(2020年26期)2020-08-04
森林工程(2018年4期)2018-08-04