
An advanced cost-efficient IoT method for stroke rehabilitation using smart gloves
2024-01-08 13:04:40ArivarasiThiripurasundariArockiaSelvakumarBhuvanKumaarAghilRahulandRamaniKannan
纳米技术与精密工程 2023年4期
A.Arivarasi, D.Thiripurasundari, A.Arockia Selvakumar, Bhuvan Kumaar, T.Aghil, S.Rahul, and Ramani Kannan
AFFILIATIONS
1 Vellore Institute of Technology,Chennai,India
2Universiti Tecknologi Petronas,Kuala Lumpur,Malaysia
ABSTRACT Stroke represents a severe,widespread,and widely acknowledged health crisis on both national and international levels.It is one of the most prevalent life-threatening conditions.Despite impressive advances in treating stroke,in addition to a need for effective patient care services,many sufferers still rely solely on physical interventions.The present paper describes and explains the use of a newly designed gadget for stroke survivors who cannot move their fingers This is a sophisticated mobile device that enables stroke patients to regain their muscle memory and thus their ability to perform repetitive actions by continuing to tighten and stretch their muscles without the intervention of a physiotherapist.Gamificatio methodology is used to encourage patients to become involved in the process of rehabilitation.The device also has sensors that take information and transmit it to an app through an ESP32 connection.This enables physicians to view glove usage information remotely and keep track of an individual patient’s health.Communication between app and glove is facilitated by a broker in the Amazon Web Service IoT.With the robotic glove presented here,the recovery rate is found to be 90.23%over four weeks’duration,which represents a significan improvement compared with existing hospital-based rehabilitation techniques.
KEYWORDS Stroke rehabilitation,Smart glove,ESP32,AWS cloud
I.INTRODUCTION
Smart gloves are a kind of portable device designed for supporting stroke patients with the aim of improving their living standards.These gloves help patients regain muscle memory through constantly release and contraction of their muscles.1When patients are attempting to maintain the function of their arms and recapture the associated muscle memory,it is quite difficul for them to move their finger backward and forward.2With smart gloves,the appropriate exercises can be performed and feedback can be sent instantly for physicians to evaluate the patient’s performance.
Stroke patients who require rehabilitation need to go through several physiotherapy sessions in order to achieve the objective.3Such physiotherapy can be a very challenging and draining process for the patient,who needs to travel from their home to the hospital or facility where the treatment is to take place.As the majority of rehabilitation patients are older,4they fin travel difficult Another issue is the size and weight of the therapeutic equipment required for physiotherapy,which is also not easily transported from place to place.5Both of these issues make rehabilitation a very tiring and expensive process.It is with the aim of making rehabilitation for stroke survivors easier6and more affordable that the smart rehabilitation gloves described in this paper have been designed.
A smart glove only weighs around 200 g.Based on how long the glove is being used,the usage statistics of the patient will automatically be sent to a user interface (UI),and an app has been created specificall for this purpose.7Both the doctor and patient can directly view this data from the UI and app.This eliminates the need for the patient to travel to a physiotherapy center.8These smart gloves costs around 4000 INR,which is just one-tenth of the total money spent on physiotherapy.The need to visit the doctor every so often to discuss changes that need to be made for future physiotherapy sessions is completely eliminated by using smart gloves.9The glove collects gauntlet activity data and transfers it to the Amazon Web Service (AWS) cloud,where it is both recorded and sent to the UI and app.10The doctor will then be able to view the glove usage statistics of each patient and give them appropriate feedback on further glove usage.The patient will be able to view the doctor’s feedback directly in the UI and app.11In this design,there are two interfaces:a physical one and a virtual one.
The physical interface layer consist of textured cotton gloves that help the wearer grip better,an ESP32 microcontroller (a lowcost but powerful module integrated with a low-power system),12,13a dual Wi-Fi and Bluetooth facility,pneumatic“muscles”that function as contractile or extensional devices operated by air pressure in a bladder,a pneumatic pump using pressurized gas or air,hinge clamps on each finge to hold the pneumatic“muscles”at the correct positions,braided nylon cable to maintain stability,a fle sensor to detect the stress applied to it,and a manifold valve that receives input from a source and transmit outputs to multiple destinations.14The virtual layer consists of the AWS cloud services and the UI/app that enables doctor and patient to view usage statistics.Thus,this design enables physicians to view glove usage information and keep track of their patient’s health.
The major contributions of the proposed glove can be summarized as follows:
• Its main purpose is to assist stroke patients who are unable to move their hands by providing them with greater engagement and stability.
• It enables analysis of existing stroke rehabilitation procedures and thus provide a basis for the development of a more efficien and patient-friendly rehabilitation method.
• Sensors on the glove collect information and transmit it to a processor and a Digital Twin via the ESP32 microcontroller.
• Patient’s glove usage information collected by the interface enables a physician to monitor the patient’s status.
• The use of this glove will speed up patients’ recovery and enable them to follow an appropriate treatment plan.
The remainder of this paper is organized as follows.Section II describes related work,particularly with regard to various techniques related to stroke rehabilitation.Section III demonstrates the proposed methodology,and Sec.IV presents experimental results obtained with the glove.
II.RELATED WORK
In association with interactive rehabilitation therapies such as the use of walking aids and upper limb rehabilitation,robot-assisted physiotherapy have been extensively used.Hand rehabilitation for stroke patients has also lately become a focus of research.Some of the current methods are examined below.
Nawiet al.14designed a smart glove for post-stroke rehabilitation.Hemiparesis or hemiplegia in the upper and lower limbs are the most common motor deficit following stroke.Although motor recovery is highly variable,it can be improved through motor therapy if movements are repeated and intensifie sufficientl frequently.Smart gloves are intended to provide a tool that might be able to improve motor recovery by informing both the patient and therapist about the number of hand movements (including wrist and finge extensions)that are made during therapy.More research is needed to determine whether such feedback helps speed up the restoration of hand function in people with neurological impairment,thereby opening up new opportunities for the creation of innovative arm rehabilitation monitoring devices that can improve patients’lives.
Patelet al.15developed smart hand gloves for disabled people to help them interact more effectively with other individuals.For example,such smart gloves can enable a speech-impaired person to turn hand gestures into artificiall generated voice and text,making it easier for others to comprehend what that person is saying and to respond appropriately.A physically disabled person can be helped to live independently through using smart gloves to manage home appliances.It should be possible to create a dependable,user-friendly,compact smart hand glove system that can reduce the barriers for individuals with disabilities to put them on an equal footing with the rest of the population.
Chenet al.16developed a wearable hand rehabilitation system based on soft gloves to enable both task-oriented therapy and mirror therapy.Using a soft,flexibl material,a pair of gloves consisting of a motor glove and a sensory glove was devised,offering greater comfort and safety than traditional rigid rehabilitation equipment.The force and fle sensors in the sensory glove,to be worn on the unaffected hand,were utilized to monitor the assembly,including the bending angle of each finge joint to detect motion.The motor glove,powered by tiny motors,gave the injured hand assistance during driving in order to carry out training activities.Machine learning was used to identify the motions generated by the sensory glove and to simplify activities for the rehabilitation of the damaged hand.
Guoet al.17designed a soft robotic glove for hand rehabilitation using pneumatic actuators with variable stiffness.The primary characteristic of this design was the stiffness of each actuator at various positions,which allowed the actuator to bend at those positions.A further crucial feature was the use of fabric sleeves to enable the actuators to exert more bending force on the hand under pressure.The viability of the actuator was confirme through modeling,and experiments were also performed to gauge the performance of the soft actuator and the device as a whole.This device was demonstrated to be capable of completing some hand rehabilitation tasks.
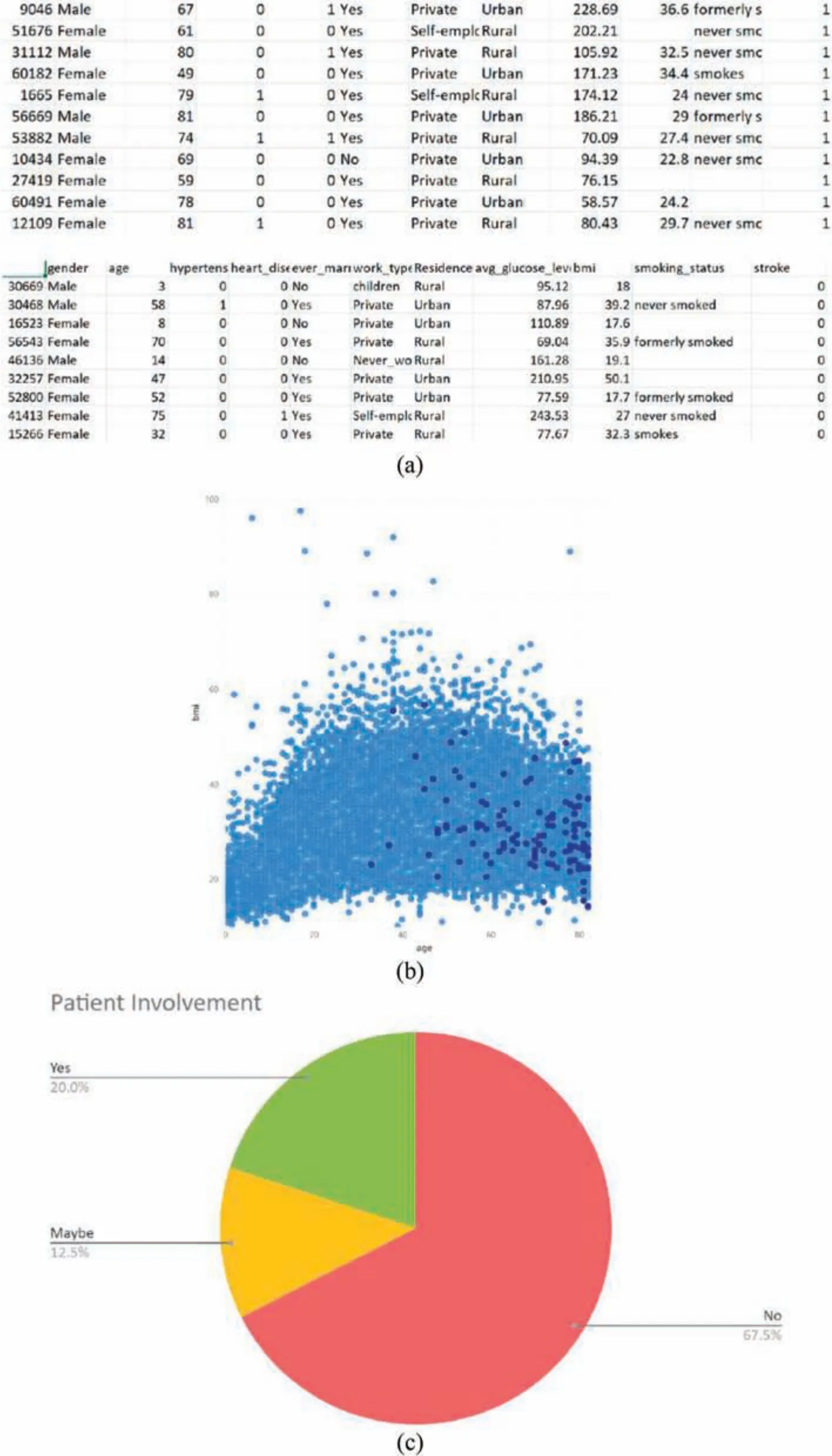
FIG.1. (a) Part of the global dataset used in this study.19 (b) Distribution of stroke patients with respect to age and average BMI (c).Involvement of patients in stroke rehabilitation.
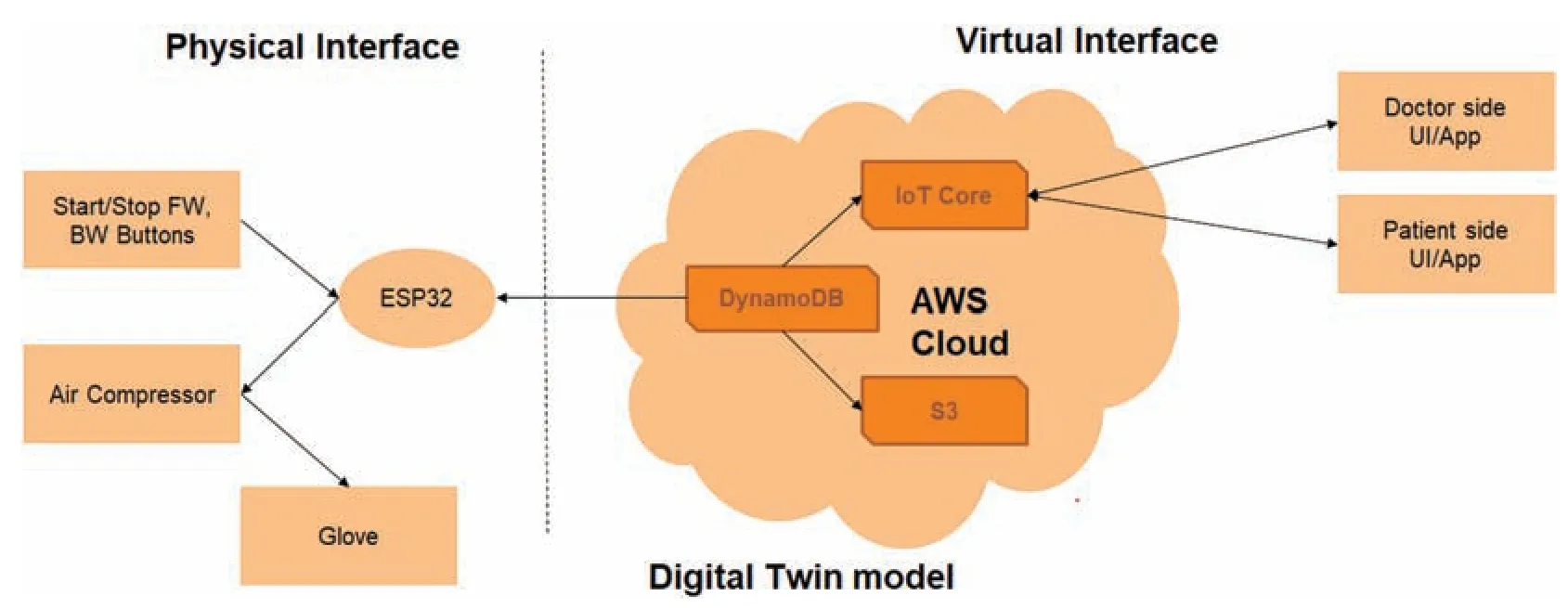
FIG.2.Server node flo diagram.
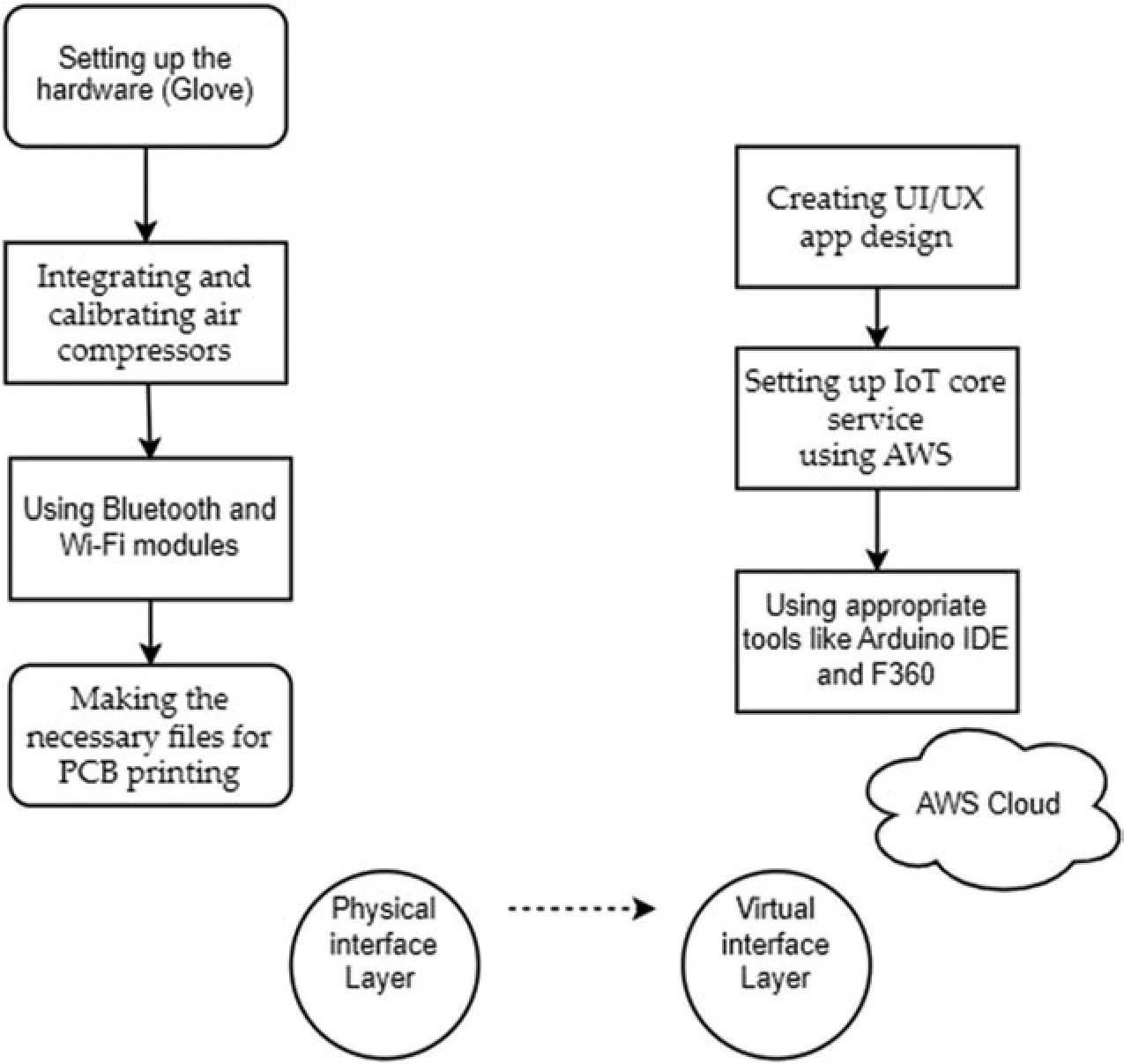
FIG.3.Methodology using digital twin model.
Liet al.18designed a soft robotic glove for hand rehabilitation training that was powered pneumatically and was controlled by movements of the healthy hand.The majority of stroke patients with hand impairment possess undamaged musculoskeletal structures and one side of the body that functions normally,and their hand function can be regained through appropriate rehabilitation exercises.This robotic glove was created via 3D printing.It was controlled by data on motion of the patent’s healthy hand collected from a data glove on that hand.A trial of the proposed glove demonstrated that it was helpful to users in accomplishing rehabilitation tasks.
From the above review,it can be seen that a variety of robotic gloves have been developed to automatically perform the closing and opening movements of the hand,which represent the basic and most important functionality in stroke rehabilitation.However,one of the main problems with this approach is that the patients are not involved in this process of rehabilitation.To overcome this problem,we have implemented a gamificatio process.Gamificatio is used here to enable patients to become involved in the process of rehabilitation by providing an interactive game that is controlled by the hand movements made when using the gloves.Thus,our proposed glove improves the stroke rehabilitation process itself,as well as encouraging the user to perform their exercises daily.

FIG.4. (a) Cotton gloves with textured grip.(b) ESP32 MCU board with power management modules,in-built antenna switches,power amplifiers filters and low-noise receive amplifiers (c)Pneumatic muscles are directly to the structure they control in such a way that they can easily be replaced if damaged muscle.(d)Pneumatic pump for pressurized gas or air.(e)Pneumatic muscle integrated with clamps.
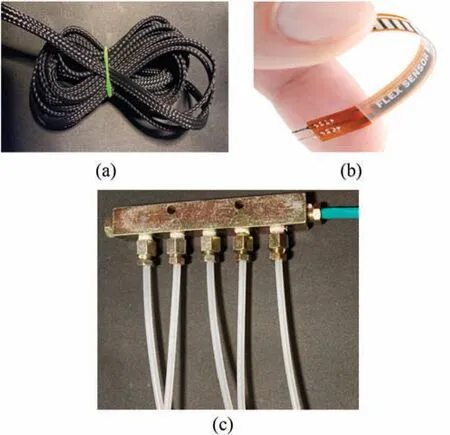
FIG.5.(a)Braided nylon cable.(b)Strain sensor to measure the stress on a particular joint.(c)Metal manifold valve with input from a single source and output to multiple destinations,and vice versa.
An analysis of available global data is performed using published visualization images.19A huge dataset containing details of patients with multiple health issues was constructed and analyzed to reveal similarities and irregularities among patients with different issues.Based on this analysis,appropriate changes were made to the elements of the design of the smart glove.The results of the analysis can be seen in Fig.1.A graphical depiction of the distribution of stroke patients with respect to age and average body mass index(BMI)is presented in Fig.1(c).From Fig.1,it can be observed that patients who are going through the process of rehabilitation face a lower success rate,since they are not fully involved in the process,i.e.,a novel glove to facilitate this process at a faster pace is required.
III.METHODOLOGY
As shown in Fig.2,a digital twin model is used to implement the proposed smart gloves,with the proposed methodology being presented in Fig.3.The physical interface consists of all the hardware used to make the glove.The virtual interface consists of all the cloud services used in this project,and a UI/app has been created to enable the of viewing usage statistics by both doctors and patients.These interfaces together form the digital twin model.20
A digital twin is a virtual model that provides an accurate representation of a physical object.Sensors that produce data about various aspects and areas of functionality such as the object’s performance,energy output,working parameters,and sensed quantities are relayed to a processing system and applied to the digital copy.Once it has received such data,the virtual model can compare and study the object’s performance,in turn displaying or generating possible improvements.The results then can be fed back to the physical object,as shown in Fig 2.
The proposed methodology assumes that the topology of the communication network is known and that the communication channel is noise-free and uninterrupted.During use of the AWS cloud service,data are auto-saved and backed up with an assigned frequency.During retrieval,the last saved data is retrieved.In case of interruptions to the network,the system needs to be enhanced to regain the counted epoch values when it is not connected to the cloud.
A.Methodology of the proposed model
This purpose of this work is to create a system that will assist stroke patients who are unable to move their hands and provide them with greater engagement and stability.Existing stroke rehabilitation procedures are analyzed with the aim of developing a more efficien and patient-friendly approach to rehabilitation.Sensors are used to collect data and transmit them to a processor and digital twin via the ESP32 microcontroller.This user interface allows physicians to view glove usage parameters and monitor patient status.To emulate the human hand,the glove employs soft robotics.Standard components and protocols are used for the transfer of data from the ESP32 board to the gloves and AWS,and vice versa.

FIG.6.A piece of the StrokIT Bird Game code.
1. Physical interface layer
An electrical,mechanical,and procedural interface to the forcetransmitting medium is provided by the physical layer.The physical layer specifie low-level features such as the sizes and characteristics of electrical connectors,broadcast frequencies,line code,and other parameters.The hardware consists of textured cotton gloves,the ESP32 microcontroller,Wi-Fi and Bluetooth connections,pneumatic air muscles,a pneumatic pump,hinge clamps,braided nylon cable,fle sensors,and a manifold valve.
The cotton gloves shown in Fig.4(a) have a pattern of raised dots or similar textured coating on the palm and finger to improve the wearer’s grip.
The Espressif ESP32 [Fig.4(b)] is a low-cost,highly effective microcontroller that includes a low-power system,a dual Bluetooth and Wi-Fi facility,and a microprocessor.It is a successor to the ESP8266,which is a Wi-Fi module.It has in-built power management modules,antenna switches,power amplifiers filter and low-noise receive amplifiers The ESP32 uses a combination of proprietary software to achieve ultra-low power consumption.It also includes features such as clock gating,dynamic power scaling,and several power modes.The ESP32 may function as a standalone system or as a secondary to another MCU,reducing communication overhead on the main processor.The ESP32 can also be used to communicate with other systems to provide wireless capabilities such as Wi-Fi and Bluetooth.
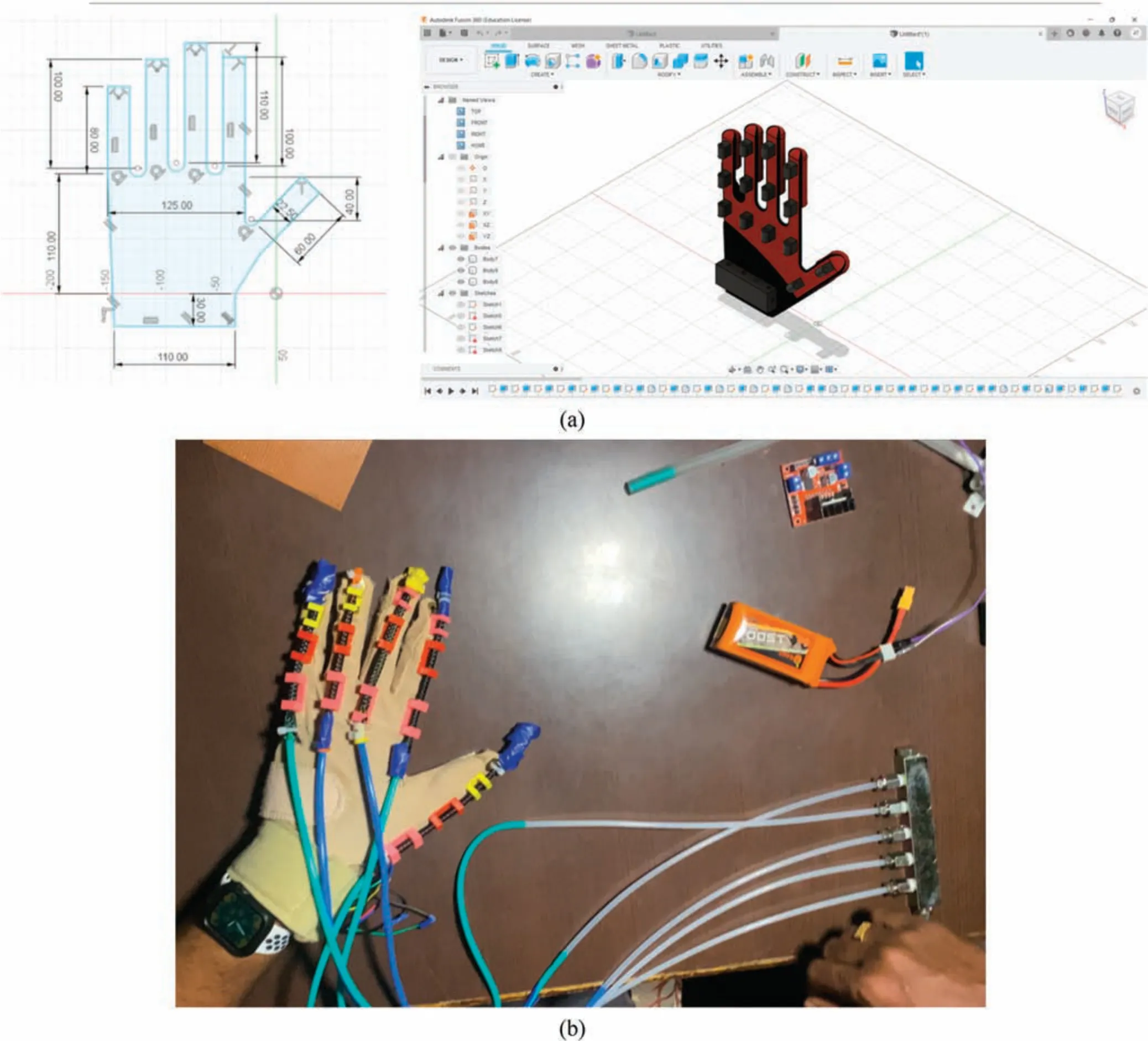
FIG.7.(a)Design of smart glove with its dimensions.(b)Implementation of smart glove using connected components.
Wi-Fi was developed by the IEEE in 1999 and was formally introduced in 2003.In general,Wi-Fi stands for wireless fidelity It is an overlay of radio-frequency (RF) technology that enables a user with a computer or mobile device to connect wirelessly to the Internet in various locations without any physical connection being present between the computer or mobile device and its terrestrial modem/router.Although this is what is commonly understood by the term Wi-Fi,this technology can also be referred to as a wireless local area network(WLAN).However,a key difference between Wi-Fi and WLAN is that the former refers specificall to the wireless RF technology itself,whereas the latter refers to a wireless computer network in a specifi location.For definiteness in this paper,Wi-Fi is taken to mean the standard that is being used for the transmission of data.
The Bluetooth wireless technology standard enables shortrange wireless communication between devices.It is commonly used for exchanging data between mobile phones and other portable devices.Bluetooth is a point-to-point wireless technology that does not require an access point.Bluetooth is a short-range wireless technology that operates in the 2.4 GHz frequency range.This makes it ideal for use in applications such as hands-free devices and wireless headsets since it avoids interference from other devices that may be operating in the same frequency range.It can also be used to create a personal area network (PAN),which allows devices to communicate with each other within a limited range.The Bluetooth Special Interest Group (SIG) is in charge of Bluetooth and has over 35 000 members in the telecommunications,networking,consumer electronics,and computing industries.
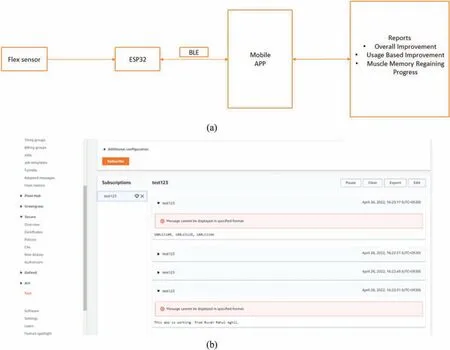
FIG.8.(a)Gamificatio block diagram.The fle sensor data are fed to the mobile app through the ESP32.Various reports are obtained from the app.(b)Message processing step through MQTT.
The pneumatic artificia muscles(PAMs)as shown in Fig.4(c)are contractile or extensional devices that are operated by air pressure in a pneumatic bladder.PAMs are normally organized in pairs to approximate human muscles:one agonist and one antagonist.The cumulative strength of the individual fiber in the woven shell limits the retraction strength of the PAMs.The tightness of the weave limits the exertion distance,with a loose weave allowing for more bulging,which bends individual fiber in the weave even more.Because their major component is a thin membrane,PAMs are extremely light.This enables them to be directly attached to the structure they control,which is advantageous when a muscle is damaged and needs to be replaced,since the location of the malfunctioning muscle can immediately be recognized.
The pneumatic pump shown in Fig.4(d) drives the forcetransmitting medium (pressurized gas or air).The two pistons of the pump,one of which has a significantl smaller diameter than the other,are separated by an airtight cylinder fille with a liquid or compressed gas.The compressed gas exerts external pressure on the larger-diameter piston,which in turn exerts pressure on the intermediate chamber of gas or liquid.As a result,the smaller piston is subject to a significantl greater force,which translates into forceful mechanical movement.
As shown in Fig.4(e),the pneumatic air muscle has to interact with the finger to perform the required closing and opening actions of the hand.Hinge clamps are placed on each finge and hold the pneumatic air muscles at the right positions.The clamps are made of polylactic acid (PLA),a thermoplastic monomer that is produced from recycled organic materials such as sugar cane or corn starch (i.e.,biomass),in contrast to typical plastics produced from petroleum products (i.e.,fossil fuel).Despite this differences in raw materials,PLA can be produced using the same machinery as petrochemical-based plastics,which offers considerable economic advantages.After thermoplastic starch,PLA is the second-most commonly manufactured bioplastic,and it has physical characteristics akin to those of polyethene (PE),polystyrene (PS),and polypropylene(PP),while having the advantage of biodegradability.
To maintain stability,a braided cable is necessary:because the wires of the cable are crossed and interlaced,the braiding can bend and stretch without buckling,folding,or kinking.The braided cable used in the gloves [Fig.5(a)] is a good electrical conductor and forms an electrostatic screen to protect signals from interference.The high electrical conductivity is provided by the use of copper,tinned copper,and aluminum wires,while mechanical strength and toughness is provided by steel wires,nylon strands,and glass fibers The braided wire cable,as well as resisting abrasion and cutting,provides additional protection against hot surfaces.Such braided cables are also a resistant to gnawing by rodents.Braided cables can be used to create cable harnesses.
A fle sensor measures the stress applied to a particular area,which makes it especially useful for determining whether a given activity is putting too much stress on a joint and thus help to adjust physical activities to prevent further joint damage.Such fle sensors [Fig.5(b)] are key components of the proposed robotic glove.A resistive network unit is used for measuring resistance.Of the two resistances,one is a fle sensor,the resistance of which varies depending on the degree of flexing Whenever the sensor is bent,the terminal resistance increases,and this is represented by a change in voltage.Without these fle sensors,the gamificatio part of the present project could not be implemented.The signals generated by the fle sensor whenever it is subjected to stress are what enable the gamificatio part of the project.These signals can be brought into any specifi useful range of values by means of appropriate resistors.In the robotic glove,the fle sensors are connected to appropriate resistors to give output values in the range of zero to a hundred units,on the basis of which the game can be controlled by the user.
A manifold[Fig.5(c)]is a device that receives input from one source and outputs this evenly to multiple destinations,and vice versa.This reduces the number of inputs required in any multi-input system.In the case of the present robotic glove,each pneumatic muscle actuator has to pump air evenly at the same time in order to open the hand.Once a sufficien amount of air has been pumped into the actuators,it has to be sucked back out to close the hand.This procedure of pumping the air in and sucking it out of the pneumatic muscles is performed by a pneumatic pump.The problem here is that a pneumatic pump has only one valve to pump the air in and out,and so,without a manifold,each pneumatic muscle actuator would need to be connected to its own pneumatic pump.This is not feasible: not only would it make the gloves more expensive but it would also increase their weight,defeating one of principal aims of the project,to create lightweight and portable gloves.To overcome this problem,a manifold valve is used instead of multiple pumps.The manifold for each glove has a total of seven valves,all of which can be used as both input and output valves.Two of the seven valves are connected to the pump valve and suction valve of the pneumatic pump.The remaining fiv valves are connected to the fiv pneumatic muscle actuators of the glove.When air is pumped from the pneumatic pump,the manifold valve connected to the pump valve acts as input and the fiv valves connected to the pneumatic muscles act as output valves.During suction,the fiv valves connected to the air muscles become input valves and the valve connected to the suction valve of the pneumatic pump becomes the output valve.
B.Virtual interface layer
For setting up the virtual interface layer,software techniques including Autodesk Fusion 360,Arduino IDE,Android Studio,Flutter,and AWS Cloud are integrated with the hardware data.
Fusion 360 is a cloud-based 3D modelling,CAD,CAM,and PCB software platform for product design and production.When designing and engineering products,one must take into account aesthetics,form,fit and functionality.Fusion 360 is important in this context since it is a multifunctional piece of software that enables the necessary tasks to be performed in one place,including 3D design,communication,data management,creation of toolpaths,and simulation and evaluation of designs.
Android Studio is an integrated development environment(IDE),developed for the sole purpose of Android application development.The design of mobile apps is accomplished through coding in Java.An Android app consists of a login page in which users can create a new account or login into their existing accounts.After logging in,a dashboard page is displayed showing real-time sensor data values and pH values predicted using the model.A navigation panel on the top right corner can be used to access other pages:an aquaculture database page used to access historical data on all the parameters and on water quality.
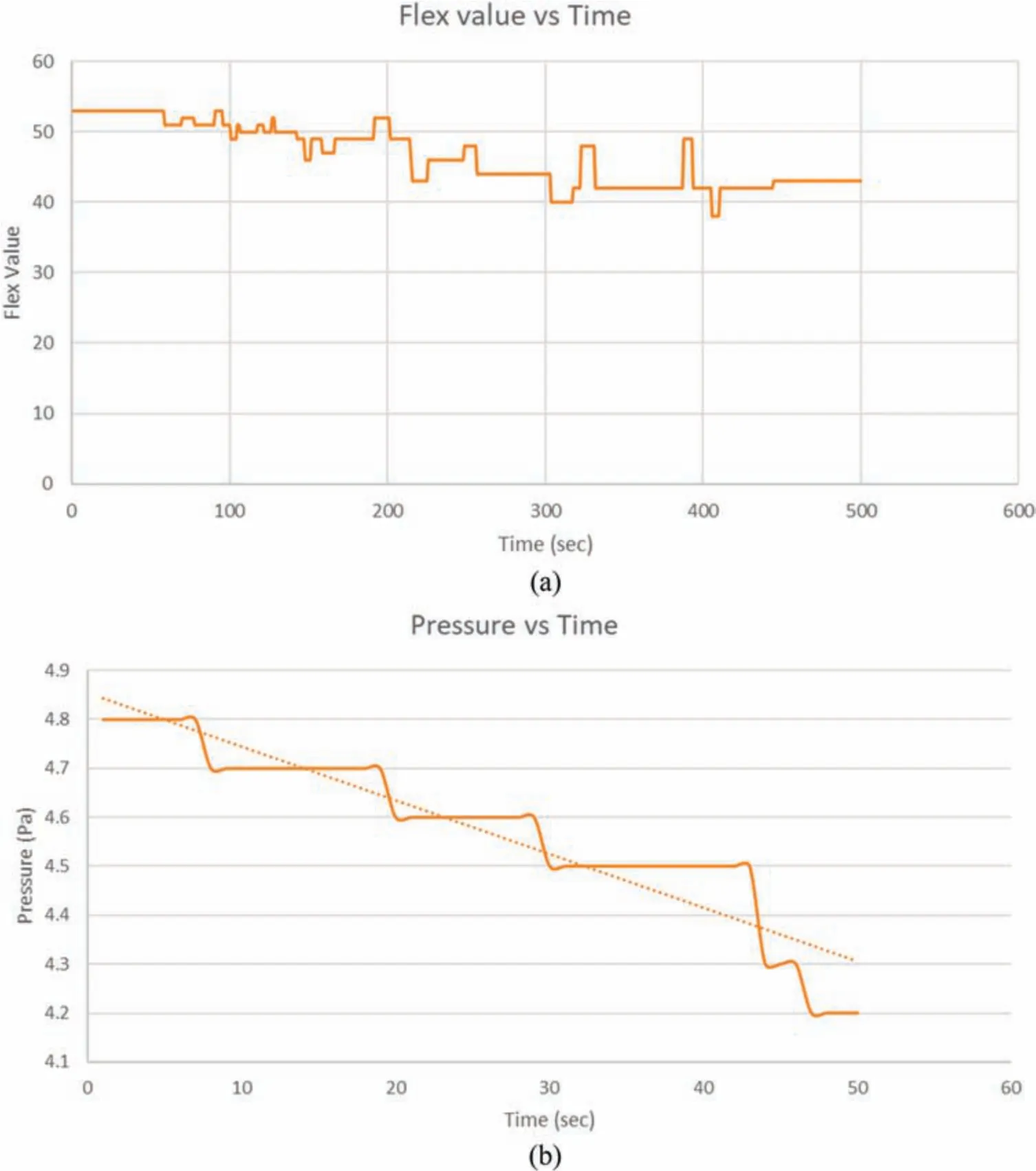
FIG.9.(a)Flex value and(b)pressure vs time for the proposed device.
Arduino IDE is a text editor for writing code for Arduino and can be connected to hardware to upload code to Arduino.This open-source software has been used to program the Node MCU development board,with the code being uploaded via a USB connector.The major advantages of this software are its compatibility with various versions of development boards,its wide community support,and the ease in which programs can be built and compiled.
A single codebase may be used to build appealing,natively developed apps for mobile,web,and desktop using Google’s portable UI toolkit called Flutter.This integrates with current code and is free and open-source.It is employed by creators and organizations all over the world.Flutter is built to handle both iOS and Android mobile apps,as well as interactive applications that can be embedded in websites or run on a desktop.Windows desktop support is now available on the stable channel,while MacOS and Linux support is still in beta,although a snapshot of the beta is also accessible on the stable channel.Flutter is especially well suited for apps that require highly branded designs.It enables the creation of pixelperfect applications that are suitable for both the iOS and Android.The hardware and services supported by the package ecosystem of Flutter include GPS,camera,storage,and network (such as cloud storage,payments,advertisements,and authentication).
The Message Queuing Telemetry Transport(MQTT)protocol is used for communication between device and AWS and between AWS and Android app.It is known for its lightweight and batteryfriendly properties suitable for low-power and low-memory devices.The reason for choosing the MQTT protocol for the proposed robotic glove is that it can be easily integrated with the other systems used in this work.The AWS IoT core service communicates more easily through MQTT clients than via other forms of communication such as REST API.Automation of processes within the AWS IoT such as relaying messages received from the device to the app(the piece of code shown in Fig.6),storage of sensor data in the database,and manual control of the pump is programmed easily.
AWS is a cloud service platform that offers on-demand computing services,databases,storage,and a variety of other features.It allows users to select goods from a wide range of services and utilize them on-demand,with most services requiring no upfront purchase.AWS services may lack some capability on their own,but with the correct AWS architecture,they may be readily combined to create very sophisticated and reliable applications.Netfli employs AWS for nearly all of its computing,storage,and database needs,with over a million AWS server instances.The majority of AWS services do not demand payment in advance.A user pays according to how much they use the service and for how long they do so,and this pay-as-you-go pricing mechanism is one of the most significan advantages of AWS.For example,suppose one wishes to perform a computational activity with a capacity of 5x.This task can be accomplished in fiv units of time with anx-capacity machine or in one unit of time with fivx-capacity machines.The cost is the same for each method.This payment model enables users to customize their application architecture to meet their own business requirements and budget.
IV.EXPERIMENTATION,RESULTS,AND DISCUSSION
An advanced cost-efficien method for stroke rehabilitation using smart gloves has been developed.The design and implementation of the smart glove using the hardware and software described in Sec.III are illustrated in Fig.7.
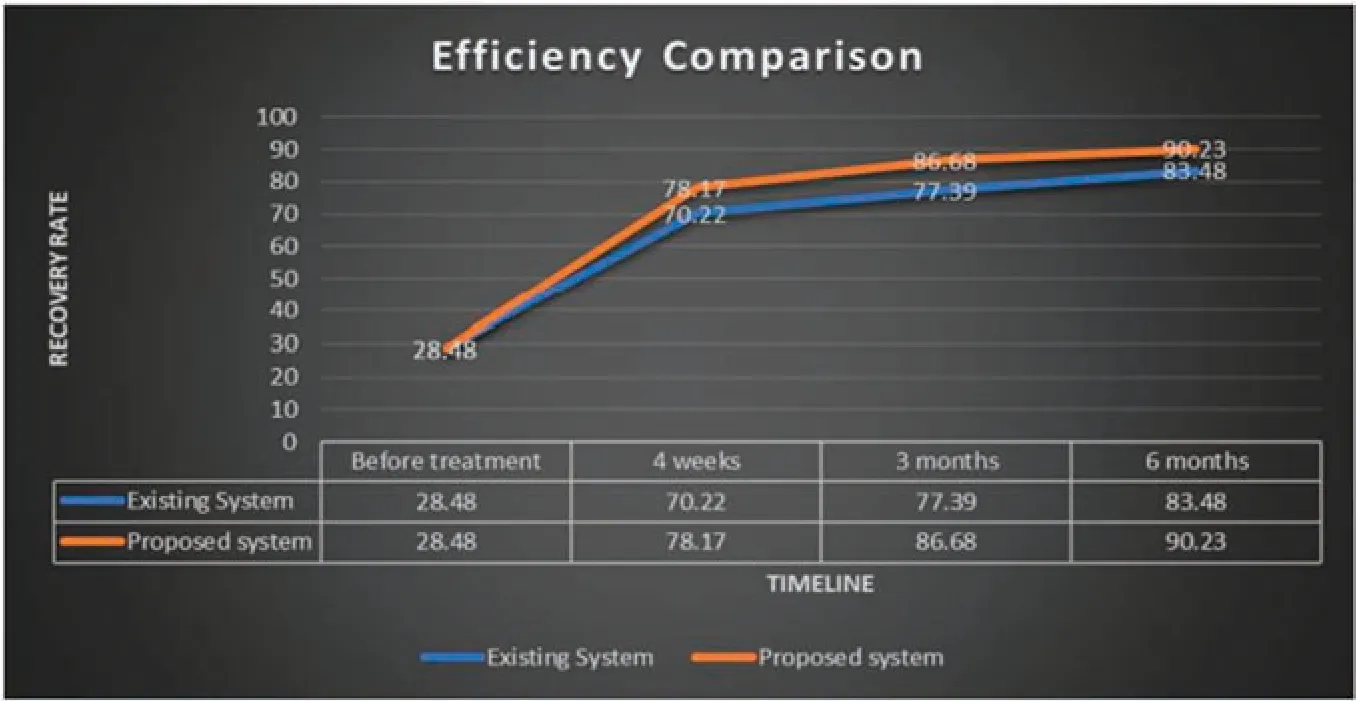
FIG.10. Efficienc comparison of proposed and existing techniques.23 Compared with the existing hospital-based recovery approach,the robotic glove proposed here provides faster healing along with useful data for physicians and patients.
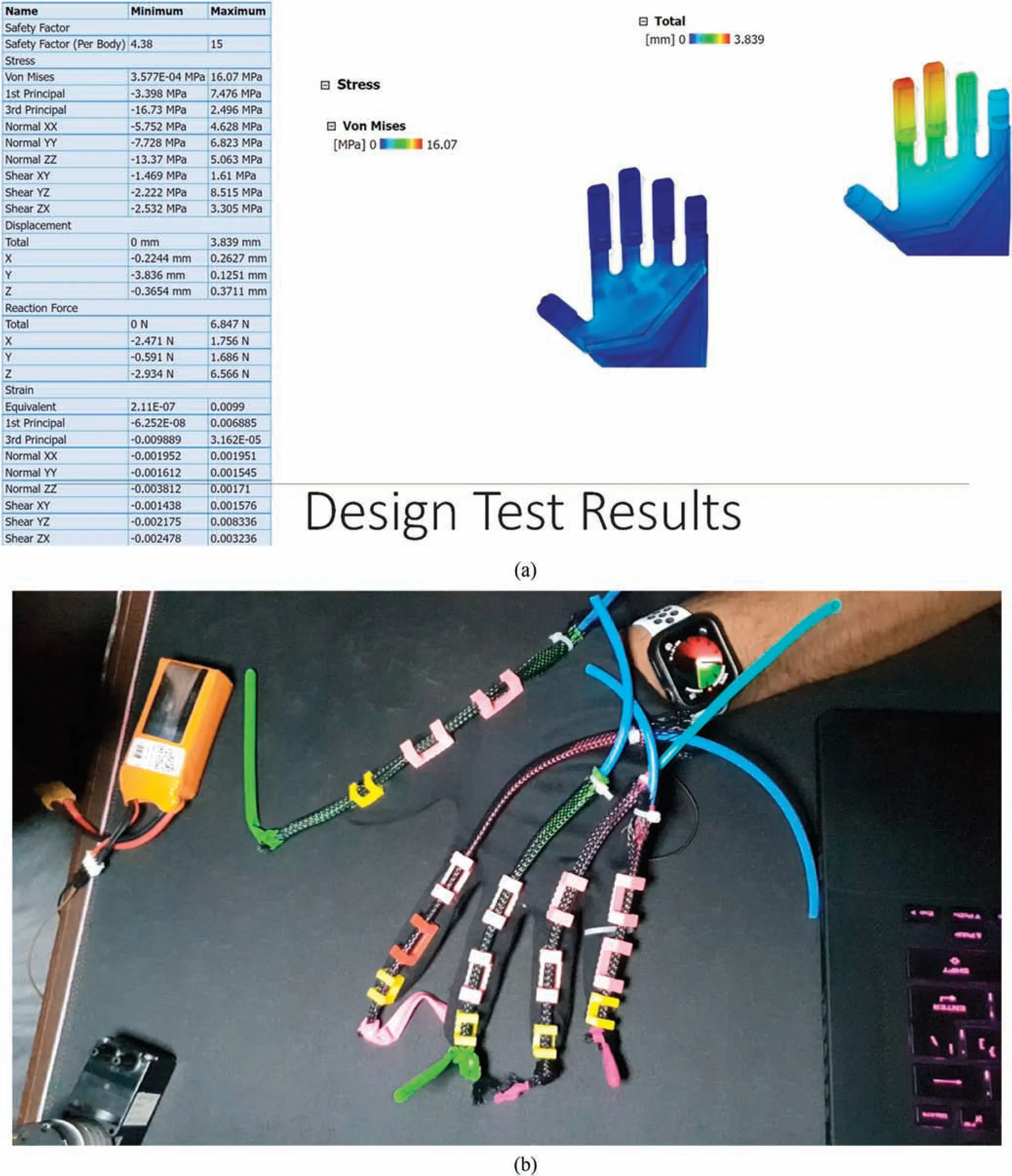
FIG.11.(a)Test results for the proposed glove.(b)Testing of the glove.
The system configuratio is an Intel i5 10th Generation processor with 32 GB RAM and NVIDIA GTX 1650 GPU.The data collected from the gloves by the ESP-32 MCU are sent to the AWS cloud.After processing in the AWS cloud,the collected data are sent to the StrokeIT Bird app for the physician and patient to view.In the gamificatio block diagram shown in Fig.8(a),the fle sensor data are fed to the mobile app through the ESP32.Various reports are obtained from the app using the connected experimental setup shown in Fig.7(b)[and in Fig.11(b)below],the required values are configured and the intended operation is implemented.Using the ESP32 code snippet fle sensor,values can be visualized,and data are subsequently sent to the AWS IsoT Message Queuing Telemetry Transport (MQTT) broker.This broker facilitates communication between the app and the gloves.Values are published every 5 s.The MQTT portion of the app contains specifi functions for connecting to a topic and disconnecting from a topic.The send message to a topic is also configured Further coding is performed in the StrokIT bird gamificatio tool as illustrated by the example in Figs.6 and by Fig.8(a).Functionalization is achieved through object position,pipes,ending,and high score.This function sends the message via MQTT from the message text box.A location-based server is config ured to retain the medical data according to the appropriate national regulations for handling medical data.Configuratio is performed in the AWS IoT to aid the MQTT configuration The ESP32 configure the glove communication,and the app corresponds with the MQTT gaming application in this context.Each aspect possesses its own certificat package that connects the app and glove very securely to the AWS MQTT server.The testing client in turn is sets up to check the connection between device and MQTT broker as shown in Fig.8(b).As a result,the messages sent from the app are received by the AWS MQTT broker.
Compared with the approaches to rehabilitation described in Refs.21 and 22,where hospital costs neared $15 000 per week,excluding the rental cost of $200 per fortnight,the assembly and operation of the proposed setup are both easy and cost-effective(see Table I).The total cost of making the gloves is low:around 90%less than the costs of existing hospital-based systems,which are large and lack portability,making it time-consuming for patients to travel to the hospital for treatment almost every day.It should be noted that all alternatives were considered when prototyping this product to ensure its cost-effectiveness.
The fle value represents the factor by which an item will shrink relative to its initial size,and Fig.9(a)shows the fle value vs time for the proposed device.It can be seen that overall the fle value of the proposed device decreases with increasing time.
The pressure of the proposed device is shown vs time in Fig.9(b),from which it can be seen that overall the pressure also decreases with increasing time.Initially,at 0 s,the pressure is 4.8 Pa,falling to 4.2 Pa at 50 s.The glove thus retains its pressure reasonably well under full load,showing that the pneumatic muscle provides satisfactory performance.
Despite severe disabilities and neurological impairment during the early post-stroke period,most stroke patients achieve some degree of recovery over time.For example,some show early motor function recovery,primarily within the firs few months.These improvements have to be recorded.The variables include age,side of stroke(right or left),and time from stroke to rehabilitation.
Outcome measures were examined at the initial rehabilitation baseline,at one,two,and four weeks after rehabilitation treatment,and at three,four,five and six months after stroke.Patients were assessed using the Trunk Impairment Scale,the Fugl–Meyer Motor and Sensory Assessments for the upper and lower limbs,the Mini-Mental State Examination,the Functional Ambulation Category,and the Modifie Barthel Index.Twenty consecutive patients were analyzed in the study with complete assessments.Recovery was relatively rapid during the four weeks after treatment (withPvalues ranging from<0.001 to<0.007)and then decelerated between three and six months after stroke (withPvalues between <0.001 and 0.080).23The study reported in Ref.23 with which the results of the current work are compared confirm the importance of the period within three months after stroke,during which most of the recovery occurred,ranging from 48%to 91%.Therefore,intensive treatment targeting motor and sensory functions early after stroke may be beneficia for recovery from impairment and restoration of functional performance.
In Ref.24,a flexibl and wearable pressure sensor based on MXene/poly(3,4-ethylenedioxythiophene)–poly(styrene sulfonate)(PEDOT:PSS) was fabricated and used as an acoustic sensor and was used for speech recognition and health monitoring,achieving a recognition accuracy of 91%.
In Ref.25,an MXene-based sound detector was prepared and provided improved sound and speech recognition,with sensitive responses to pressure and vibration.By training and testing a deep learning network model with large amounts of data obtained from the MXene-based sound detector,the long vowels and short vowels of human pronunciation can be successfully recognized.The key application of such a device in biomedicine would be to artificia throat devices.
Reference 26 describes F-GNEC film-base e-skin that can be fabricated by direct batch manufacture using a plasma generated by electron cyclotron resonance together with polariton energy transfer between the plasma and a substrate surface.This e-skin is stable and fir and exhibits multi-response detection capabilities,with potential applications to virtual reality technology and,in particular,to flexibl robots like the robotic gloves proposed in the present work.This e-skin has a measured gauge factor of 14 699 under a tensile strain ofε=0.5%,and the rate of change of its resistance reaches 113.2%when the e-skin is bent to 120○.27
An efficienc comparison between the existing hospital-based rehabilitation approach and the technique using a robotic glove proposed in this paper is presented in Fig.10.The efficiencie are compared before treatment and at four weeks,three months,and six months.The efficienc of the technique using robotic glove increases with time as 28.48%,78.17%,86.68%,and 90.23%,all of which are as good as or better than the 28.48%,70.22%,77.39% and 83.48%,respectively,of the hospital-based approach.
From Figs.4(e),11(a),and 11(b),it can be seen that the glove is subject to the greatest stress in the knuckle region and needs to be reinforced there for long term use.The index finge is subject to the most strain and stretches more than the other fingers and it therefore needs the most reinforcement.
V.CONCLUSIONS
Robotic gloves to aid rehabilitation of patients with stroke have been developed.The gloves speeds up the recuperation process,while also reducing the amount of time required for the patient’s treatment sessions.The preliminary results of tests on these gloves are encouraging.The recovery rate is found to be 90.23%over four weeks’duration.
The technique based on these gloves uses physical and virtual layers consisting of hardware and software that are interlinked to each other using various intermediators.Data from the gloves are collected and transmitted by an ESP32 MCU via the MQTT protocol for analysis by the treating physician.
The performance of these gloves could be enhanced by making them completely metallic.This would result in a more durable and long-lasting product.In this case,the gloves could be fitte with soft cotton liners to improve their comfort for the user.To reduce the weight of the gloves,lighter metallic material or carbon fibe material could be used.Future research could be devoted to determining the ideal metal for this purpose,possibly through an analysis utilizing artificia intelligence.Another possible direction for future research is the fabrication of robotic gloves from of e-skin or other novel materials.
ACKNOWLEDGMENTS
The authors would like to thank Vellore Institute of Technology for support.
AUTHOR DECLARATIONS
Conflict of Interest
The authors have no conflict to disclose.
Author Contributions
The corresponding author is responsible for the major contributions to this paper,including formulation,analysis,and editing.The co-authors provided guidance to verify the analysis results and helped with the editing of the manuscript.
DATA AVAILABILITY
Data sharing is not applicable to this article as no new data were created or analyzed in this study.
- 纳米技术与精密工程的其它文章
- Nanostructure enabled extracellular vesicles separation and detection
- Smart epidermal electrophysiological electrodes:Materials,structures,and algorithms
- An image mosaic technique with non-overlapping regions based on microscopic vision in precision assembly
- Electrical characterization of an individual nanowire using flexible nanoprobes fabricated by atomic force microscopy-based manipulation
- Design and analysis of longitudinal–flexuralhybrid transducer for ultrasonic peen forming
- Effects of simulated zero gravity on adhesion,cell structure,proliferation,and growth behavior,in glioblastoma multiforme