无人船测量系统在水文应急监测中的应用
2024-01-08 12:09:34周梦瑶戴凤君张美玲
中国水能及电气化 2023年12期
周梦瑶 戴凤君 张美玲
(江苏省水文水资源勘测局镇江分局,江苏 镇江 212028)
在当前社会经济大发展、人类活动加剧导致全球气候巨变的大环境下,水灾呈现出突发、频发的特点,严重危害人民身心与财产安全[1]。汛情的应急反应能力决定着防汛决策的制定以及成效,提高应急监测能力是当前水文工作的一项重要内容。我国内陆河流分布多而广,易发水灾。江苏省复杂的水系条件,使防汛抗旱工作难度系数直线上升。当前水文应急监测仍多采用缆道流速仪法或由缆绳拖拽搭载有声学多普勒流速剖面仪(Acoustic Doppler Current Profilers,ADCP)的人工船对流量进行监测,其监测效率低且在极端天气条件下容易造成安全事故,影响水文应急能力的提升,由此急需构建并优化出一套适用于应急情况的水文监测系统。
近十年来,无人系统的研发及其在海洋领域的应用呈几何级数的趋势增长[2],形成了一批包括无人机、无人船、水下无人潜航器在内的新型无人系统[3,4]。本研究采用的无人船测量系统以无人船为载体,可搭载水位测量仪、流速仪、水质监测仪等多种水文监测仪器,同时监测多种水文要素[5]。由于其集成化程度高,面对复杂的测量环境,无人船测量系统能够克服多种监测难题,适用性较传统监测方式大大提升,为洪涝灾害地区的应急决策与降低财产损失提供了极大助力。
本研究以水文测验无人船为载具平台,搭载测流设备构建无人船测量系统,并将该测量系统实际应用于河道水文应急监测中。该系统具有监测效率高、不扰动流场、适用环境广、操作易上手、测速范围大等特点,有效提高了在应急情况下的水文监测能力。
1 无人船水文测量系统原理
无人船测量系统以无人船为载体,配备4G通信网络、高清摄像头,在定位定向板卡上搭载测深仪以及ADCP等测量设备,对测验区域的流速、位置、水深等参数进行快速准确的采集,适用于山区河流、内河湖泊、水库、城市中小型河流等[6](见图1)。无人船测量系统中的流量数据的监测与获取主要由ADCP完成,其利用多普勒频移原理,在测流断面上布设多条测速垂线,通过测量每条垂线多点水深处的流速得到各垂线平均流速,再结合断面数据输出流量数据,完美地弥补了传统测流的局限性,其中ADCP应用广泛,能够提供高精度、全范围、多要素的监测数据,在河流水文监测、水文研究,以及水域经济建设等方面都具有重要意义。
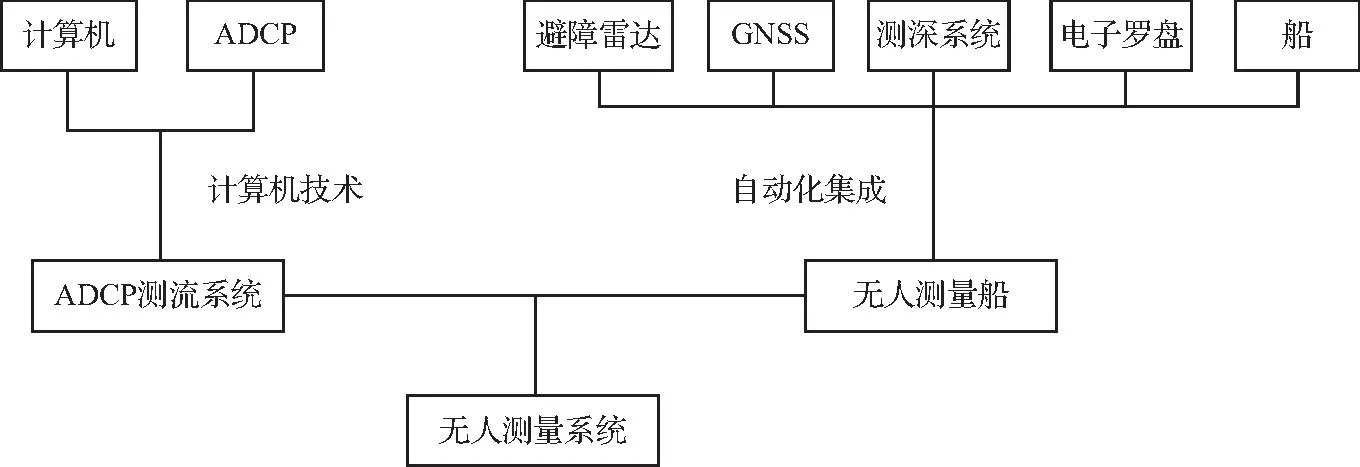
图1 无人船测量系统构成
无人船测量系统依托CORS-RTK作业模式进行导航与定位,得到的位置数据精度能达到5cm,高程数据精度能达到10cm。在全球导航卫星系统(GNSS)连接卫星定位连续运行参考站(CORS)实现测量设备点位的固定解算前,用户设备通过GSM向控制中心发送一个概略坐标,控制中心通过计算机为用户择优选取一个固定基准站,并将高精度的差分信号发给移动站,本研究中通过GNSS连接江苏省CORS站(JS CORS)实现测量设备点位的固定解算,并通过位置信息实现无人船测量过程中的自动导航[7](见图2)。
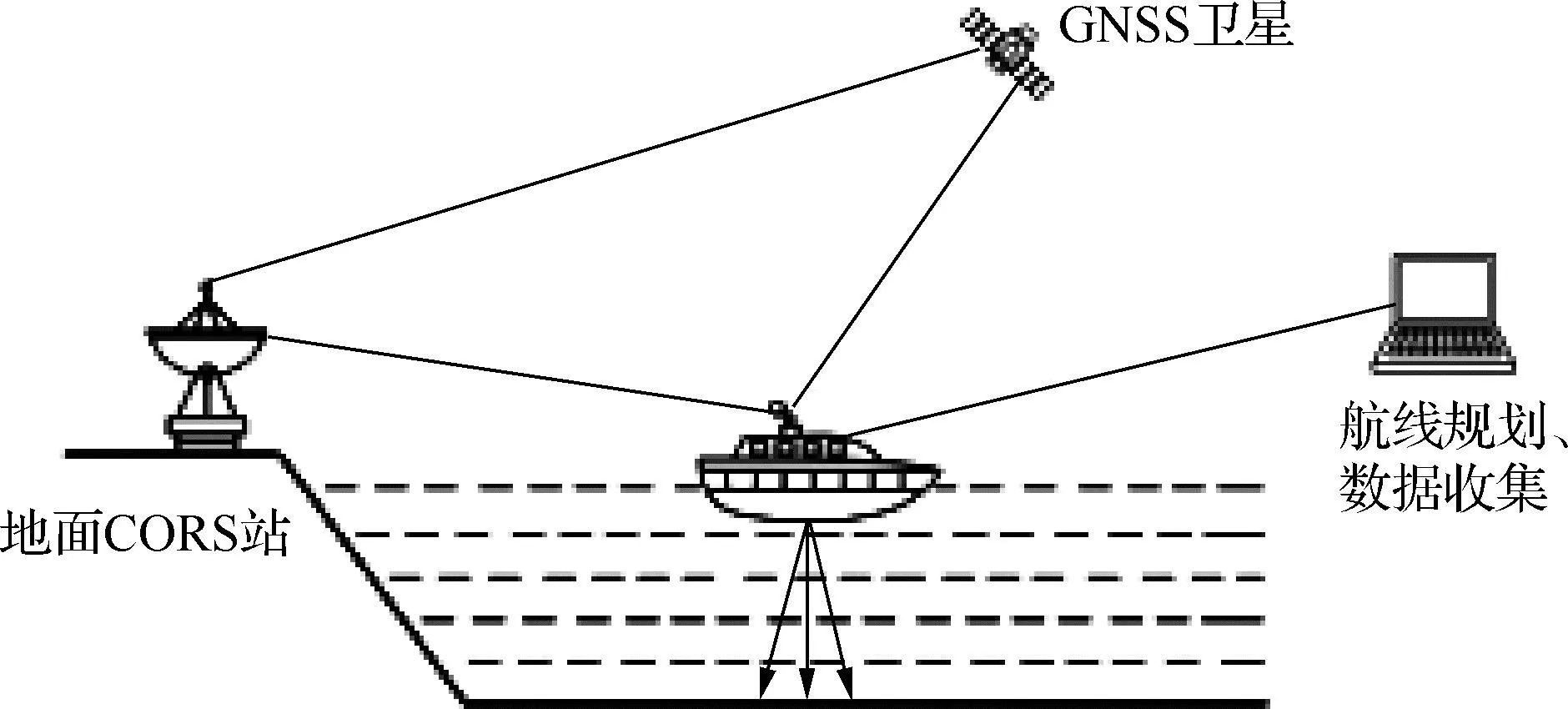
图2 无人船测量示意图
本研究使用专为水文现代化开发的新一代“华微4号”自动水文测验无人船(见图3),结合北斗高精度全球定位系统与无人船自动控制技术,适配市面主流走航型ADCP。该型号船长1.2m,重13kg,装载超速马达,最大船速7m/s。搭配毫米波避障雷达,摄像头参照岸边距进行判断,保证测验的安全以及精准性。具备自动航行、自适应水流直线技术与悬停技术,保证断面直线走航,助力水文测流全自动化(见表1)。搭配瑞江1200kHz ADCP,构建出本文所用的无人船水文测量系统。

表1 “华微4号”无人船主要技术参数

图3 “华微4号”无人船
2 无人船水文测量系统工作流程
使用无人船测量系统对流量进行监测的流程(见图4),首先要完成计划的全面准备以及测点的勘察工作,选取视野开阔、环境安全的区域开展流量监测。然后进行设备的安装与调试工作,准备就绪后开始航线的规划并开始无人船的试航行。一切流程正常无误后,开始无人船测量系统的正式作业,进行水文数据采集,得到处理后的数据。为保证数据的正确性与合理性,需要对获得的数据进行检查与修正,当发现数据异常时,需要再次进行数据采集,直至数据合格,完成测量。
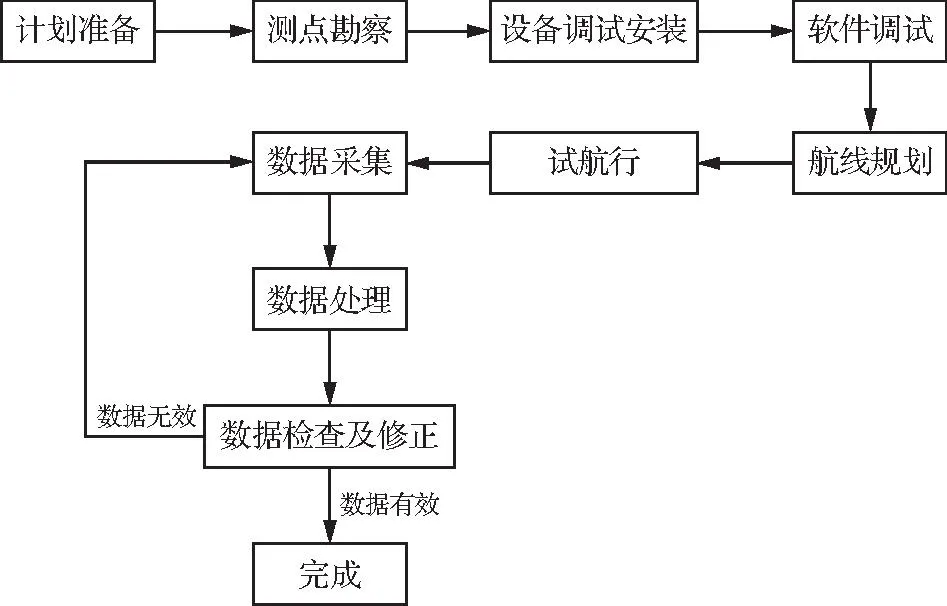
图4 无人船测量系统作业流程
为进行无法满足传统测验条件断面的测流,江苏省水文水资源勘测为各个分局配备了无人船,构建了搭载多种ADCP的测流系统,解决了这些断面的测流问题,为在暴雨等极端条件下的流量应急监测做出了贡献。
3 无人船测量系统在镇江水文中的实际应用
3.1 主要应用测区
无人船水文测量系统已经在江苏省水文水资源勘测局镇江分局得到应用,并完成了测量精度分析。本研究测区位于京杭大运河苏南段入长江口1.3km处的谏壁闸水文站,其属于国家重要水文站、一类精度站及中央报汛站,也是大运河苏南段入江口门控制站,控制大运河进出水量,历史最高水位为1996年8月1日的8.64m。谏壁闸水文站监测要素主要为水位、流量、降水、水质,各要素已实现在线监测自动化。该段水面情况较好,水质清澈,适合无人船作业。
江苏省水文水资源勘测局镇江分局使用的华微4号无人船搭载瑞智型ADCP(见表2),可在15min内完成谏壁闸水文站的断面测流,解决了水文测验要求在同一流量级下的难点问题,测量过程中应注意以下几点:ⓐ在测流过程中,无人船应尽量保证匀速行驶且行驶速度小于水流速;ⓑ测量范围尽量选取在两岸的ADCP盲区水深处,以提高测流数据的精度;ⓒ一个测次的施测为左岸→右岸、右岸→左岸2个来回,实测流量值为所测断面流量的平均值,并进行现场记录;ⓓ在测量过程中当无人船在北斗定位系统实时导航下到达实测断面左岸预设点时,无人船保持悬停,此时ADCP开始设置相应的左岸边参数,随后控制无人船向右岸匀速行驶进行第一个测回的测量,到达右岸预设点保持悬停,此时ADCP开始设置相应的右岸边参数,并开始第二个测回的测量,到达左岸后保持悬停,至此该测次结束操作[6]。

表2 设备情况
3.2 监测精度对比实验
2023年6月17日是镇江入梅之日,本研究选取6月18—20日暴雨情况下谏壁闸水文站紧急排水时的测流数据,流量数据以排水为负,以引水为正。在大暴雨情况下,大运河水位急促上涨,紧急将大运河的水量排至长江,以缓解内河排涝压力,因此本次测验的流量数据均为负值。该测验点的河段宽度约109m,水面开阔,水质较好,无明显水面漂浮物。为了排除数据的偶然性,分别进行20次流速仪人工测流与无人船测流并进行误差分析(见图5)。

图5 勘测区卫星图
测验流程:检查船体仪器连接正常无误后将无人船下水,随即手动操控无人船开至监测断面中央;让无人船在无操作情况下顺流漂3s获取水流方向,然后将无人船开到岸边预设点处悬停,在ADCP测流软件中配置相关的河道断面信息后解除悬停,操控电脑端或遥控器控制无人船按照航线行驶,同时进行ADCP数据采集,行驶至对岸预设点无人船自动悬停,此时ADCP软件停止测验,依次开始下一个测次(见图6)。

图6 无人船测量系统实际测试场景
3.3 测量结果与精度分析
本研究共选取20个流量测验数据,由表3无人船测流与流速仪测流数据对比可知,无人船搭载ADCP测流系统与水文站流速仪所测的流量数据误差值在±5m3/s之间,20个测次的误差率均在±5%之间,误差率均值为-0.15%。由于此次测流数据为极端天气下的监测值,且谏壁闸水文站的断面宽度较大,根据比较,无人船测流系统和流速仪测流数据误差范围较小,说明无人船搭载ADCP测流系统的监测精度较高,适用于日常流量数据监测(见表3)。
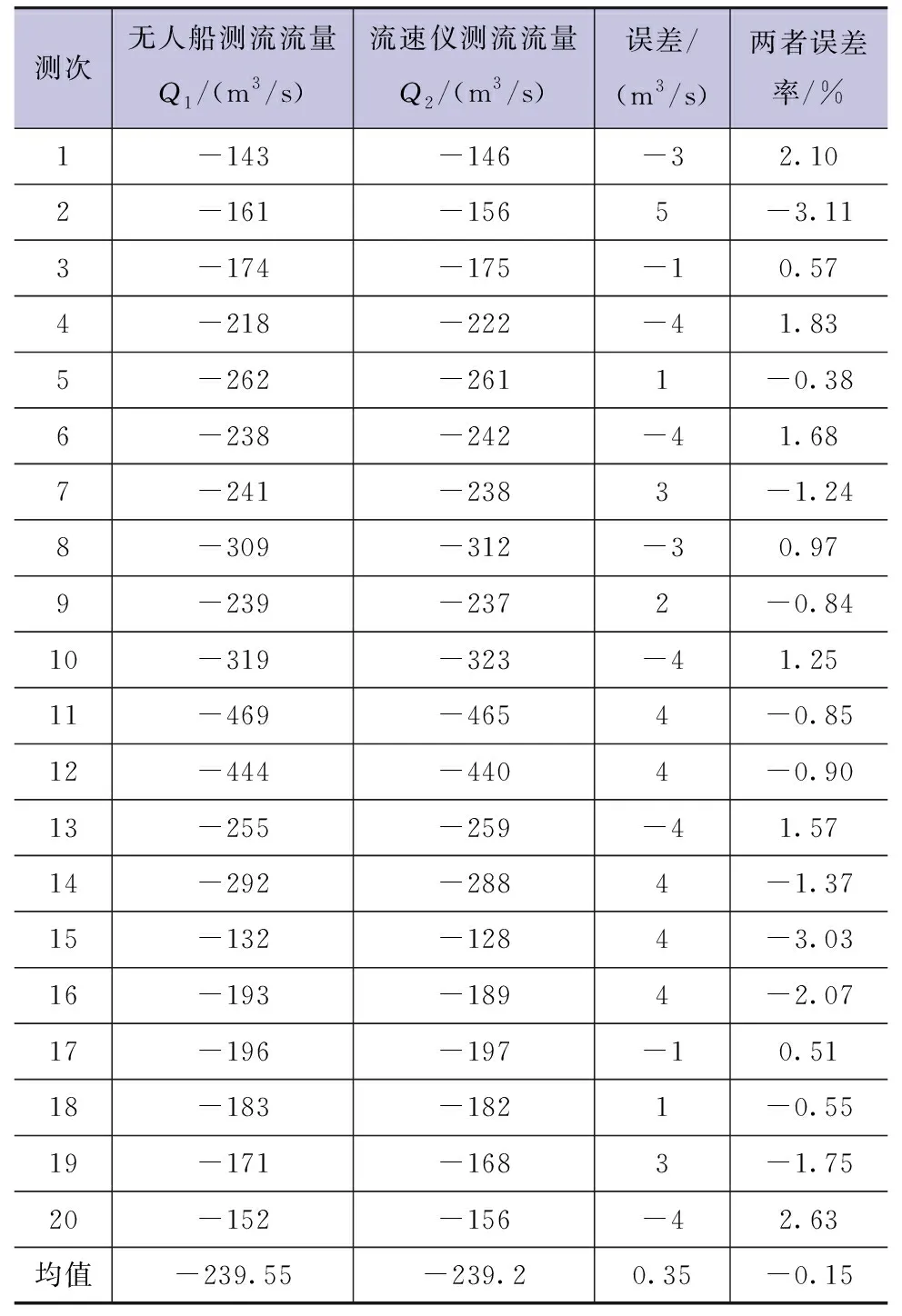
表3 谏壁闸水文站无人船测流与流速仪测流数据对比
4 优缺点分析
4.1 优点分析
a.安全系数高。采用远程遥控操作的方式可以使操作人员远离危险区域。
b.测量效率高。无人船测量系统集成化程度高,节约设备间的连接时间;作业所需时间短,航向稳定且准确,避免重复测量,节省人力。
c.测量精度高。无人船自带绝对直线技术、自适应流速技术、自动悬停技术,可以保证航线的稳定性,从而确保数据的高精度。
d.测量范围广。采用遥控的方式能够对大型水域进行监测,且由于无人船的吃水深度只有10cm,能实现从岸边到中央的全水域测量。
e.环境兼容性强。无人船搭载的ADCP无须像传统流速仪那样必须垂直于断面,无人船可以以斜线或者曲线的航迹测得断面流量数据。
4.2 缺点分析
a.对信号强弱依赖性高。无人船测量系统需要借助GNSS实现平面的定位,对于周边遮挡严重、无GNSS信号的水域,无人船测量系统具有劣势。
b.动力模块保护措施需要进一步加强。运行过程中,马达若是被缠绕住,需要人员进入水域进行救援;在水草多的区域,马达会受到阻塞,航行测量效率受到影响。
5 结 语
本文以无人船测量系统在江苏省水文水资源勘测局镇江分局的应用为背景,介绍了无人船测量系统的工作原理与流程。以“华微4号”无人船为载体,搭载瑞智型ADCP构建无人船测量系统。通过对京杭大运河局部区域进行断面流量测验并与流速仪缆道测流方法进行比对,无人船搭载ADCP测流系统和水文站流速仪所测的流量数据差值在±5m3/s以内,20个测次的误差率均在±5%之内,误差率均值为-0.15%,误差范围符合使用要求。
无人船测量系统的实际使用情况表明其具有安全性强、测量精度高、稳定性强、效率高、测量范围广、使用方式多样的优点,为水文应急监测、抢险救灾提供了一种功能强、更高效、更广泛的测验手段。该系统在使用中展现出了绝对的优势,且随着技术的进步与5G时代的赋能,其将在未来的水文应急监测发展中发挥主导作用。
猜你喜欢
水资源开发与管理(2023年8期)2023-09-08 13:27:10
黑龙江水利科技(2022年4期)2022-05-25 13:30:48
石河子科技(2022年4期)2022-03-24 05:45:28
河南水利年鉴(2020年0期)2020-06-09 05:43:48
河南水利年鉴(2020年0期)2020-06-09 05:43:30
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
山东水利(2018年6期)2018-03-24 13:00:35
河南水利年鉴(2017年0期)2017-05-19 02:29:33
岷峨诗稿(2017年4期)2017-04-20 06:26:43