大斜视滑动聚束方位向波束指向控制策略
2024-01-08 02:24陈郅航郑世超吴思利汤叶科王咏祺张金翼
上海航天 2023年6期
陈郅航,王 辉,郑世超,吴思利,汤叶科,王咏祺,张金翼
(上海卫星工程研究所,上海 201109)
0 引言
星载合成孔径雷达是一种具备全天候、全天时观测能力、高频重访重覆盖、目标特性提取丰富等突出优点的主动微波遥感系统,被广泛应用于地球测绘、农林检测、海洋遥感等关键领域。近年来,星载合成孔径雷达系统发展迅速,特别是具备宽带大扫描能力的相控阵技术的发展,使得星载合成孔径雷达系统的分辨率不断提升,观测模式和频段更加丰富[1]。目前,大斜视条件下的高分辨成像系统设计成为国内外的追踪热点领域。大斜视滑动聚束模式是当前大斜视条件下,高分辨成像系统的主流设计方案。对滑动聚束过程模式的设计,国内外已有较多的研究。
文献[2-9]阐述滑动聚束模式、聚束模式及条带模式的区别,对滑动聚束模式的正、斜侧视情况下点目标方位向频率变化历程开展推演,并分析天线方位向扫描情况下方位向分辨率沿着距离向空变的情况,并提出了一种适用于斜视滑动聚束模式的成像算法。文献[10-14]主要研究滑动聚束模式下系统参数的详细流程,通过推导滑动聚束模式下天线尺寸、脉冲重复频率、发射功率、信号带宽、扫描角度等系统工作参数及各系统用户指标,如分辨率、幅宽、模糊度、系统灵敏度之间的联系,实现脉冲重复频率(Pulse Repetition Frequency,PRF)和波位位置的自动选取,进而实现合成孔径雷达(Synthetic Aperture Radar,SAR)参数设计全流程自动化。
文献[15-17]提出通过平台姿态敏捷机动和载荷波束捷变扫描一体化控制,实现条带成像、多条带拼接成像、滑动聚束成像等传统成像模式的方法。建立敏捷卫星平台,通过卫星姿态调整控制波束指向的姿态机动策略。该策略认为卫星通过三轴姿态机动实现波束指向控制,克服了大斜视角时单轴或双轴姿态机动出现的场景弯曲,适用于高分辨率滑动聚束成像模式的姿态设计。文献[18-19]分析高分辨率和大斜视的成像要求会导致较大的距离徙动(Range Cell Migration,RCM)。PRF 固定不变即接收窗固定时,为了保证数据获取时间内所有的回波脉冲能被完整接收,距离向测绘带宽对应的时间宽度必须小于接收窗宽度,并且不受星下点回波与发射脉冲干扰。为解决这一问题提出捷变PRF 方法,通过有规律的改变PRF 使得系统接收到完整的回波数据,并提出了相关的数据重构与成像办法。但国内外对具体的方位波束扫描策略与方位向分辨率方位向空变程度、系统代价及系统性能的分析,仍存在空白。
本文首先提出基于传统虚拟旋转点的斜视滑动聚束波位设计分析,明确该方法下旋转角度、分辨率及幅宽之间的关系;然后提出一种基于全局增强鲸鱼算法的滑动聚束方位扫描控制策略,该方法将方位向分辨率沿方位向的空变程度作为目标函数,将不同时刻的方位扫描角速度作为决策变量,将方位向幅宽、最差方位向分辨率等作为约束条件,进行优化计算。经仿真分析可知,该方法通过控制不同时刻下的方位向扫描角速度,降低方位向分辨率沿方位向的空变程度与天线最大方位向扫描角度,有效降低了系统代价,提升了系统性能,验证了本文方法的有效性。
1 传统滑动聚束分析方法
滑动聚束模式是通过有规律的控制天线波位沿方位扫描,增加成像区域内点目标的波束驻留时间与方位向多普勒带宽,进而提升点目标的信噪比与方位向分辨率。
针对正侧视与小幅宽模式,通常使用虚拟旋转点法,控制系统的方位向波束始终指向地面的虚拟旋转点,完成滑动聚束成像[20-23]。
对于点目标,其方位向分辨率表达式如下:
式中:ρa为方位向分辨率,m;Ve为等效速度,km;Ba为点目标的方位带宽,Hz。
在虚拟旋转点法下的几何模型如图1 所示。

图1 正侧视滑动聚束几何模型Fig.1 Geometric model for side-looking sliding spotlight scanning
可知方位向幅宽表达式如下:
式中:Wa为方位向幅宽,km;r1为最近斜距,km;r2为旋转斜距,km;θstart为初始聚束角,单位为(°);θend为终止聚束角,单位为(°);θa为天线方位向波束宽度,单位为(°)。
定义波束前视θ为正,后视为负。
假设P为成像场景中任意一点,当卫星雷达运动值A点时,波束前沿照射到P点,卫星零多普勒面与卫星和旋转中心的夹角为θ1;卫星运动至B点,波束后沿离开P点,卫星零多普勒面与卫星和旋转中心的夹角为θ2,如图2 所示。
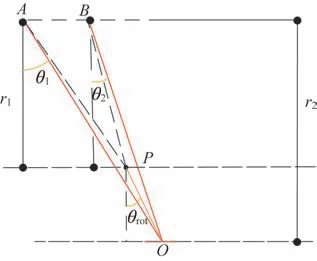
图2 侧视滑动聚束几何模型Fig.2 Geometric model for squint sliding spotlight scanning
对于P点的起始多普勒频率,当3 dB 波束宽度刚从A点照到P点时,对应的多普勒频率表达式如下:
式中:fa1为起始多普勒频率,Hz;Ve为星地等效速度,km/s;λ为波长,m。
对于P的终止多普勒频率,当3 dB 波束宽度刚从B点离开P点时,对应的多普勒频率表达式如下:
式中:fa为终止多普勒频率,Hz。
P点的多普勒带宽表达式如下:
式中:Ba为P点的多普勒带宽,Hz。
在该方法下,方位向分辨率将随着方位向扫描角的变化,出现沿方位向的空变。
对于方位幅宽内任一点,假设其与旋转中心的连线相对零多普勒线的夹角为θrot,可得表达式如下:
同理,可得表达式如下:
当旋转中心点与天线方位向半波束宽度固定时,ρa为θrot的函数;当θrot的绝对值增大时,方位向分辨率将出现恶化。特别是在斜视情况下,随着分辨率与方位向幅宽的增加,方位向分辨率沿方位向的空变程度逐渐加重。
在SAR 系统中,方位向分辨率的沿方位向的空变性将引起SAR 图像的畸变,同时增加了单景SAR 成像的扫描角度与数据获取时间,提升了系统的硬件代价和算法处理的难度。
2 波束角度控制优化模型
为降低系统分辨率沿方位向空变、扫描角度,缩短数据获取时间,对大斜视高分滑动聚束成像的需求提出一种新的方位向波束扫描角度-时间模型,并建立波束控制优化模型。
2.1 波束扫描角度-时间模型
视滑动聚束扫描角度-时间几何模型如图3 所示。将方位向波束扫描角度作为时间t的函数θ(t),通过控制每一时刻波束的方位向扫描角度,精确地控制幅宽内每一点的方位多普勒带宽,以降低成像时的方位向分辨率空变程度。

图3 侧视滑动聚束扫描角度-时间几何模型Fig.3 Geometric angle-time model for squint sliding spotlight scanning
此时成像区域的方位向幅宽表达式为
式中:tstart为扫描开始时刻;tend为扫描结束时刻。
场景内任意一点的表达式如下:
式中:t1波束前沿到达时刻;t2为波束后沿到达时刻。
点目标的方位向分辨率主要由3 dB 波束起始和结束照射时,目标与平台的夹角所决定,其表达式如下:
2.2 波束控制优化模型
对波束扫描角度-时间模型,建立优化模型代入后续计算。将天线在扫描过程中每一时刻的方位向扫描角度θ(t)作为决策变量,在满足分辨率和幅宽要求的前提下,使得方位向分辨率沿方位向的空变尽可能小。
设计目标函数如下:
式中:ρa,rep为系统要求分辨率;ρa,min为最优分辨率。
同时,扫描需要满足的约束条件如下。幅宽约束为
场景内,每一点均需满足最低分辨率约束,且约束为
在滑动聚束模式中,波束的地面照射区域始终与平台运动方向同向运动表达式为
3 全局搜索增强鲸鱼优化算法
鲸鱼优化算法(Whale Optimization Algorithm,WOA)是2016 年由澳大利亚格里菲斯大学的MIRJALILI 等,通过模拟鲸群捕食行为,提出的一种新的群体智能优化算法,相较于粒子群、遗传算法等,其收敛速度更快、鲁棒性更强。大斜视波束控制优化模型中决策变量维数高,且相互影响,某个时间点扫描角度的偏离将造成场景内大量区域的方位向分辨率的快速变化,需要采用强鲁棒性算法,确保结果收敛。本文采用一种全局搜索增强的鲸鱼优化算法,模拟鲸群捕食特点的同时,增强算法的全局搜索能力,避免出现早熟现象。算法共分为4 部分:包围猎物、旋转搜索、随机搜索和最优领域扰动搜索[24-25]。
3.1 包围收缩
鲸鱼群捕食猎物时,采用相互协作的形式,当1只鲸鱼发现目标后,将呼唤其他同伴向其靠近。在本算法中,增加随权重因子α,在搜索前期削弱最优鲸鱼位置对群体的影响,在搜索后期增强最优鲸鱼位置的影响力,提升收敛效率。该部分鲸鱼位置更新公式为
式中:n为迭代次数;nmax为最大迭代次数;X为鲸鱼位置;X*为最优鲸鱼位置,即场景内分辨率空变最小的鲸鱼位置;A和C为计算系数;γ1和γ2为0~1 均匀分布的随机数;a为收敛因子,从2 到0 线性递减。
先假设足够长的扫描总时间,按照问题维度dim 均分为dim 个典型时间,并给每个典型时间生成1 个满足约束条件方位向扫描角度,形成鲸鱼位置向量X=[θ(t1),θ(t2),…,θ(tdim)],通过插值法形成完整的θ(t)序列。
3.2 旋转搜索
鲸鱼螺旋向上搜索猎物,采用自适应权重搜索因子的同时,增加变螺旋位置更新,在传统鲸鱼算法中,鲸鱼旋转搜索的轨迹是固定的,移动轨迹单一易使得算法收敛至局部最优解。只有问题维度足够多,θ(t)曲线才能足够光滑,在多参数输入的情况下,易收敛至局部最优。为提升算法全局搜索效率,动态设计鲸鱼旋转时的螺旋形状。位置更新公式如下:
式中:l为-1~1 的随机数;b为螺旋因子。
通过耦合迭代次数的动态设计,使得螺旋曲率从大到小变化,鲸鱼在迭代前期螺旋的范围尽可能的大,提升全局搜索能力,在后期缩小螺旋形状,提升算法精度和收敛速度。
在鲸鱼捕食的过程中,包围和搜索同步进行,此时位置更新公式如下:
式中:p为0~1 的随机值。
3.3 随机搜索
鲸鱼群在搜寻鱼群的过程,具有一定的随机性,通过模拟该行为,提高算法的全局搜索能力。当系数|A|≥1 时,该鲸鱼位于搜索包围圈外,采用随机搜索方式;反之,说明鲸鱼位于收缩包围圈内,选择螺旋搜索。随机搜索模式的位置更新公式如下:
式中:Xrand为随机的鲸鱼位置。
3.4 最优领域扰动
在更新位置时,一般以当下最优位置作为本次迭代的目标。当下一轮更新出现更优位置时,才会迭代目标位置。为提高搜索效率,采用最优领域扰动,在最优位置附近搜索,避免出现早熟。
式中:Xd为新生成的位置;d1和d2为0~1 之间的随机数。
对新生成的位置,采用贪狼策略予以保留,其表达式如下:
3.5 结合优化算法的扫描设计流程
优化设计全流程共10 步,如图4 所示。

图4 侧视滑动聚束扫描优化设计流程Fig.4 Optimized design process of squint sliding spotlight scanning
第1 步输入任务需求指标,包括平台轨道高度、天线参数、分辨率、幅宽要求;
第2 步根据任务需求,配置初始化算法参数;
第3 步生成满足扫描角度约束条件原始鲸群个体位置;
第4 步判断迭代次数是否达到最大迭代次数,如达到最大迭代次数,输出优化后的θ(t)序列;反之,进行下一步;
第5 步进行最优领域扰动,避免陷入局部最优,计算鲸鱼位置对应的场景分辨率空变性,更新最佳鲸鱼位置;
第6 步判断系数|A|≥1 时,进行第7 步;如小于1,则进行第8 步;
第7 步进行鲸群随机搜索,通过鲸群位置的随机变动,寻找最优位置,并返回第4 步;
第8 步判定系数p,当p大于等于0.5 时,执行第9 步;反之,执行第10 步;
第9 步采取包围搜索,使得鲸群向最优位置靠拢,通过位置集中的方式寻找控变量最小的位置,并返回第4 步;
第10 步采取螺旋搜索,使得鲸群以螺旋的方式接近最优位置,并返回第4 步。
4 仿真试验及结果分析
利用仿真数据验证本文的波束扫描策略,在方位向大斜视滑动聚束模式下的作用,仿真参数见下表1,相应的仿真结果如图5 所示。虚拟旋转点法与本文方法的结果的比较结果见表2。

表1 仿真输入参数Tab.1 Input simulation parameters

表2 采用同不同方法的仿真结果Tab.2 Simulation results obtained by different methods
使用X波段方位向扫描,在传统虚拟旋转点方法下的起始角度为-10.590°,其数据录取结束时的方位向扫描角为-43.061 7°,数据录取时间为55.646 s。采用结合全局增强鲸鱼算法的方位向大斜视方位扫描SAR 波束指向控制策略后,数据录取结束时的方位向扫描角为-39.154°,数据录取时间为47.458 s。分辨率在方位向的空变由22.176%下降至0.385%,数据录取时间减少14.7%,总扫描角度下降12.0%,最大扫描角度下降16.4%。
相较于传统虚拟旋转点方案,本文方法在满足全场景方位分辨率要求的前提下,减小方位向分辨率空变、扫描角度,缩短数据录取时间,有效降低了系统代价。
5 结束语
针对大斜视滑动聚束模式,提出应用全局增强鲸鱼算法的方位向波束控制策略。该方法以减低场景内的方位向分辨率空变性为目标函数,通过精细化调整各个时刻的方位向波束指向角度,在保证分辨率要求的前提下,降低场景内的方位向分辨率空变性,缩短数据录取时间,减小最大扫描角度,有效降低了大斜视滑动聚束的系统代价,并通过仿真分析,验证了本文方法的优越性。对未来大斜视滑动聚束系统的设计具有一定的指导意义。
猜你喜欢
幼儿100(2022年41期)2022-11-24
数学大王·趣味逻辑(2020年9期)2020-09-06
小天使·二年级语数英综合(2019年4期)2019-10-06
动漫星空(2018年4期)2018-10-26
中国卫生标准管理(2015年8期)2016-01-15
中国当代医药(2015年29期)2015-03-01
雷达学报(2014年4期)2014-04-23
河北农机(2013年6期)2013-10-09
河北农机(2013年6期)2013-10-09
湖南中医药大学学报(2013年5期)2013-03-11