
结合深度学习的多通道InSAR高程反演方法
2024-01-05 11:10:30耿佃强谢先明曾庆宁胡高洋郑展恒
遥感信息 2023年5期
耿佃强,谢先明,曾庆宁,胡高洋,郑展恒
(1.广西科技大学 电子工程学院,广西 柳州 545006;2.桂林电子科技大学 信息与通信学院,广西 桂林 541004)
0 引言
干涉合成孔径雷达(InSAR)[1-5]探测技术可以从空间中直接获取广泛精细的地表高程信息,同时具备全天时、全天候的对地观测特点,已经成为极具发展潜力的对地观测技术。不同于单通道InSAR技术,多通道InSAR技术主要利用承载多路基线的卫星系统,获取多幅干涉相位图进行联合处理,可以有效解决悬崖、山谷、城市建筑群等不连续地形的高程反演问题。近20年,基于不同准则与策略的多通道InSAR高程反演方法被相继提出,包括中国余数定理(CRT)算法[6-7]、最小范数算法[8-9]、最大似然(ML)算法[10]、最大后验(MAP)算法[11]、聚类分析(CA)算法、图割(GC)算法[12-13]等。CRT算法利用互质基线长度之间的线性关系来恢复地形的高程值,在干涉相位无噪声的条件下可以精确反演出目标高程信息,当干涉图存在较大噪声时,CRT高程反演几乎失效。最小范数法利用多幅干涉图的梯度信息进行后续处理并求解高程,但易受Itoh相位连续性假设的限制,难以恢复复杂地形。ML算法和MAP算法通过构造概率密度函数实现最佳参数估算,进而重建高程,当干涉图信噪比较低时,高程估计精度往往不高。Yuan等[14]提出基于闭式鲁棒聚类分析(CFRCA)算法,通过求解同余方程组的方式得到聚类中心模糊向量的闭式解,增强了算法的鲁棒性。GC算法直接计算多幅干涉图的高程值,可以避开相位解缠过程,有效提升了高程估计精度,但该算法需要消耗较大内存,不利于大规模干涉图的处理。
深度学习(DL)是机器学习的一种,在自然语言处理、语音及图像识别等方面已经取得丰硕成果。随着DL的不断突破与发展,它逐渐应用到SAR目标检测[15-16]、干涉图去噪[17]、InSAR干涉图相位解缠等领域。Zhang等[18]利用语义分割网络DeeplabV3+求取缠绕相位的缠绕数并通过3×3窗口像素平均化进行后处理,得到了较为准确的解缠相位。郑顺心[19]利用Transformer-CNN网络实现联合干涉相位滤波与解缠,可以同时得到较纯净的干涉图和精度较高的解缠相位图。Zhou等[20]提出了一种基于深度学习的枝切线部署方法,使用BCNet得到枝切线结果并经过后处理得到解缠结果,取得了有效进展。上述研究为后续结合深度学习的多通道InSAR高程反演技术的发展提供了思路。
本文提出一种结合深度学习的多通道InSAR高程反演方法,通过构建MCFCF Net来实现多通道干涉图和高程图的直接映射关系。MCFCF Net使用嵌入了压缩-激励(squeeze-excitation,SE)注意力机制[21]的残差模块[22],在有效防止网络退化的同时,提高了网络对干涉图细节的捕获能力和重要通道的关注力。此外,密集连接[23]可以不断连接前向通道和后向通道,在减少参数量的同时保证了训练的精度和效率。更重要的,MCFCF Net为一种简洁有效的对称网络,在并行处理多通道干涉图的同时可以紧密连接和融合不同干涉图间的重要信息,从而较好地还原高程。完成训练后的网络能够有效完成各种复杂地形的高程反演。实验结果表明,本文方法具有较好的鲁棒性和泛化能力。
1 结合深度学习的高程反演模型
多通道InSAR高程反演技术本质是同时对多幅干涉图(通常指目标场景所对应的、不同基线参数条件下的多幅干涉图)进行处理,精确获得目标场景高程的技术。本文提出的MCFCF Net通过构建3通道神经网络,对目标场景的3幅不同基线参数条件的干涉图进行处理来获取目标高程信息,建立多通道干涉图和高程图的直接映射关系。通过制作不同地形的数据集,选择网络中合适的网络层数与通道数,定义合适的损失函数以及选择恰当的训练策略,即可使神经网络精确描述这种非线性映射关系。训练过程如图1所示,3幅干涉图作为神经网络的输入,网络输出为地形高程图。3通道干涉图联合处理,相较于其他通道数,兼顾了高精度与运行时间的优势,减少了内存等资源的消耗,可以更有效地处理复杂地形并获得更高精度的高程估计。

图1 MCFCF Net训练过程
1.1 MCFCF Net架构
MCFCF Net的主体结构如图2所示,多通道干涉图依次通过Block1、Block2、Block3、Block4后输出高程图,从而建立多通道干涉图和高程图的映射关系。MCFCF Net核心在于3个拥有多分支的Block,即Block1、Block2、Block3作为多通道干涉图特征连接与融合模块,增强网络建立多通道干涉图与目标真实高程信息之间的非线性映射关系的能力。Block1、Block2、Block3结构相同(通道数除外),以Block1为例,3个并行的支路接收多通道干涉图,每个支路由卷积层、融合了SE的残差模块(SE-Res)、卷积层组成,可以分别提取不同干涉图的有用信息,最后合并3个支路的特征图,传入Block2的3个并行支路。Block2、Block3依次循环Block1中的操作。每个Block中设计3个分支可以更优地处理多通道干涉图,整体上提高网络对多通道特征图的处理能力。Block1、Block2、Block3之间以跳跃合并的方式形成密集连接,加强了特征图的重用和不同干涉图通道间的联系。Block4中包含3个串联的卷积层,将来自Block3的特征图整合处理并不断降维后输出最终的高程图。

图2 MCFCF Net结构
图3展示了图2中SE-Res结构。其中,残差网络作为神经网络中经久不衰的模型,其容易优化、通过增加深度以提高准确率的特点被应用到许多复杂场景下。图3中,Conv为普通卷积层,1×1和3×3为其卷积核大小,BN为批归一化,ReLU为激活函数。

图3 SE-Res结构
SE如图4所示,其本质是一种通道注意力模块,主要分为压缩和激励两部分。压缩部分利用一个全局池化层对输入特征图进行空间压缩,通过调整每个特征通道的实数权重以提高对重要通道的关注力。激励部分利用了前一步聚合的通道信息,学习不同干涉图通道之间的相关性,两个全连接层可以限制模型复杂性并增强泛化能力。通道权重调整操作将通道权重作用于原始输入特征图,加强了重要特征图的输出。SE结构可以使网络聚焦于对高程反演更为关键的多通道特征图信息,继而提高高程反演的效率和准确性。从整体来看,SE-Res模块保持了瓶颈残差单元的基本结构,SE模块直接接入瓶颈残差单元中,可以调整网络对不同干涉图通道的关注程度,增强了网络的干涉图特征提取能力。

图4 SE结构
密集连接的特点是通过特征图的不断级联来实现特征重用,紧密联系前向和后向通道,进一步实现干涉条纹特征与高程细节信息的聚合机制。这些特点使得网络在保持模型精度和稳定性的同时大幅减少参数量,减缓了梯度消失的问题,加强了特征图的传递。图5展示了前向和后向通道间的密集连接方法。

图5 密集连接
1.2 MCFCF Net具体参数
表1网络参数中,B1~B4分别代表图2中的Block1~Block4。总体来看,MCFCF Net的结构简洁有效,其主体由Block1、Block2、Block3组成,其中每一个Block的并行支路可以分别处理多通道特征图,捕捉到更多的干涉图细节信息,最后的Block4整合处理特征图后还原真实高程。MCFCF Net总参数量为0.41 M左右。

表1 MCFCF Net 结构参数
2 多通道InSAR数据集
网络训练过程中,把多通道干涉图作为输入,其对应的高程图作为标签,亦即多通道干涉图与相应的高程图构成一组数据。训练所用数据包含连续地形和不连续地形两种,对应有不同的生成方式。
2.1 连续地形数据集
连续地形数据按如下两种方式生产。
方式Ⅰ:按文献[24]的方法构建连续地形数据,生成真实高程图,随后根据InSAR技术原理[25]和表2所示InSAR系统参数生成多通道干涉图,并添加噪声水平为0.5的高斯噪声。图像尺寸为256像素×256像素,标签高程范围为0~200 m。按上述方式共生成6 000组数据。图6(Ⅰ)为上述方法产生的部分数据,包括真实高程图和添加噪声的干涉图。
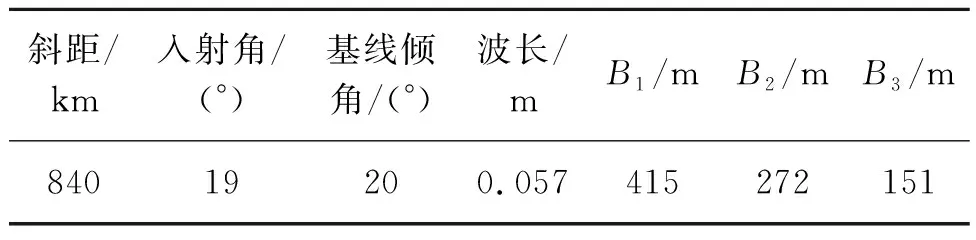
表2 多通道InSAR系统基本参数

图6 连续地形高程图和多通道干涉图
方式Ⅱ:由中国四川省地区DEM数据经过高度转化后作为高程图;随后根据InSAR技术原理和表2所示InSAR系统参数生成多通道干涉图,并添加噪声水平为0.5的高斯噪声。图像尺寸为256像素×256像素,标签高程范围为0~200 m。按上述方式共生成6 000组数据。图6(Ⅱ)为上述方法产生的部分数据,包括真实高程图和添加噪声的干涉图。
2.2 不连续地形数据集
首先通过连续地形高程图局部区域置零或重新赋值的方式得到不连续地形高程图,随后根据InSAR技术原理和表2所示InSAR系统参数生成多通道干涉图,并添加噪声水平为0.5的高斯噪声。图像尺寸全部为256像素×256像素,标签高程范围为0~200 m。按上述方式共生成12 000组数据。图7(Ⅰ)、图7 (Ⅱ)分别为上述方法产生的部分数据,包括真实高程图和添加噪声的干涉图。
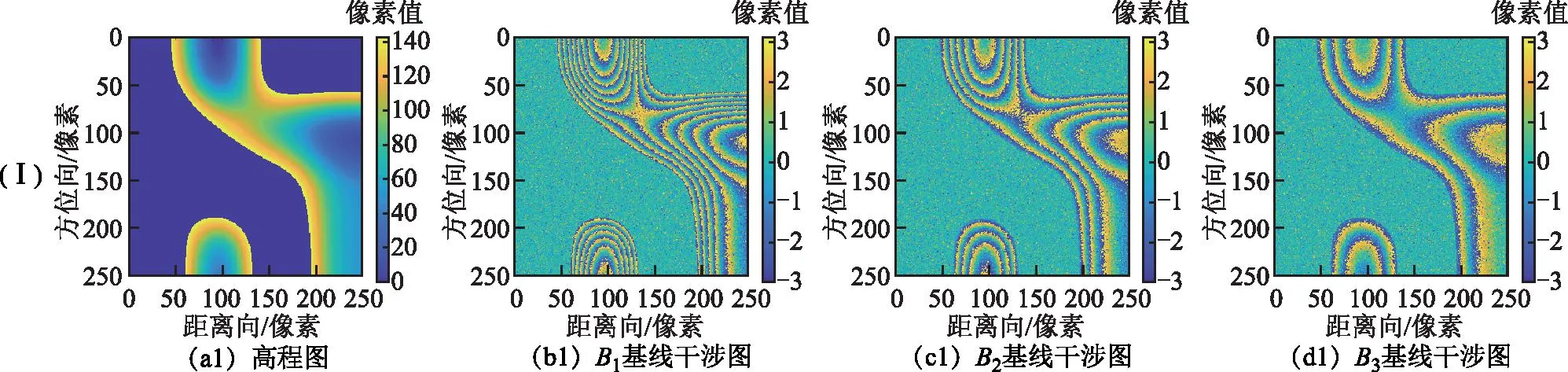
图7 不连续地形高程图和多通道干涉图
综上,连续地形数据集共生成12 000组,由连续地形生成的突变地形数据集共12 000组。总数据集为24 000组,充分打乱后分为训练数据集20 000组,验证数据集4 000组,用于训练MCFCF Net。
2.3 网络训练策略以及计算机参数配置
使用自适应矩估计优化器训练网络参数,损失函数选用均方误差,初始学习率为0.001,训练轮数为98轮,最小训练批次为8,训练时间约16.8 h。MCFCF Net开发平台为python3.7,Keras版本为2.3.0。用于数据生成及实验测试的计算机主要参数如下:NVIDIA GeForce RTX 2080Ti GPU、Xeon-W2145CPU+64 GB RAM。
3 实验结果分析
为了有效验证MCFCF Net高程反演的性能,对不同天线系统参数下3种不同类型包括连续地形、城市不连续地形以及突变地形进行高程反演实验,利用已经训练好的网络对不同的干涉图进行高程反演并且与其他传统多通道算法如ML、TV+MAP、GC相对比,采用归一化均方根误差(NRMSE)判断本文方法的性能,其定义如式(1)所示。
(1)

3.1 高程反演实验
图8(a)为模拟山峰Peaks二维高程图,图8(b)~图8(d)为根据表3所列多基线InSAR系统参数生成的干涉图,信噪比约为6.10 dB,图像大小为256像素×256像素。图9(a)为模拟城市建筑A二维高程图,图9(b)~图9(d)为根据表3所列多基线InSAR系统参数生成的干涉图,信噪比约为9 dB,图像大小为256像素×256像素。图10(a)为美国LONG’S山脉地形二维高程图,其地形图右侧有一道最大高程差近130 m的断崖式突变,图10 (b)~图10(d)分别为根据表3所列多基线InSAR系统参数生成的干涉图,图像大小为458像素×152像素,信噪比约为7.44 dB。依次用ML算法、TV+MAP算法、GC算法以及MCFCF Net算法对3组干涉图进行高程反演。
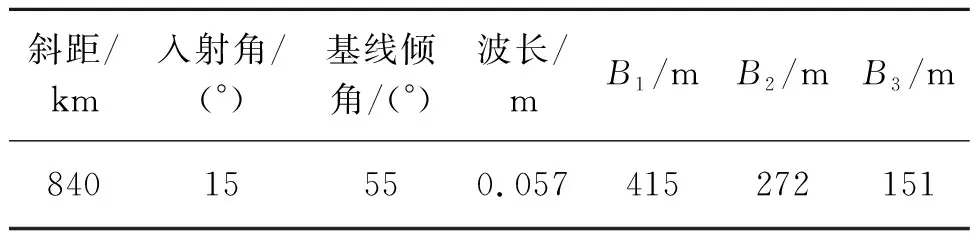
表3 多通道InSAR系统基本参数
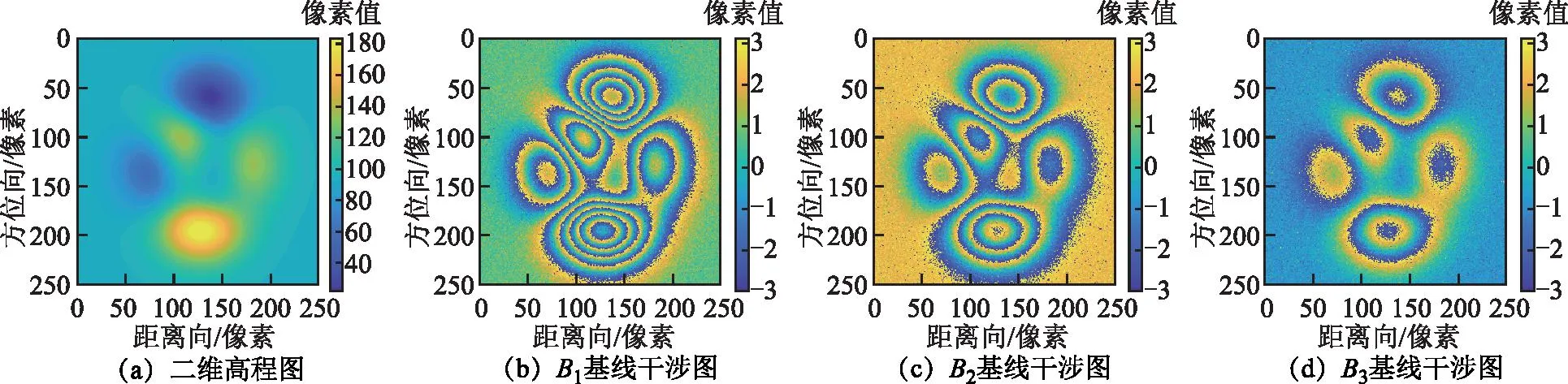
图8 Peaks高程图和干涉图

图9 城市建筑A高程图和干涉图
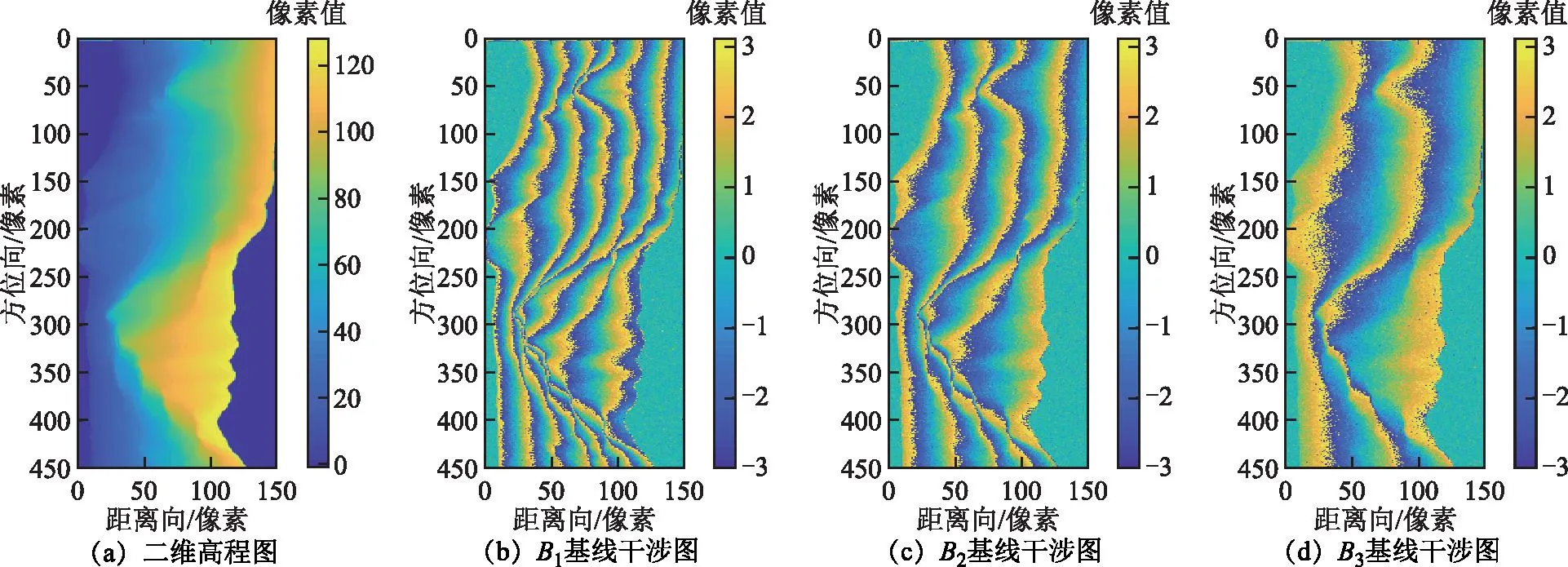
图10 LONG’S 山脉高程图和干涉图
图11(a)~图11 (d)、图12(a)~图12 (d)、图13(a)~图13(d)分别为各算法高程反演图,图11(e)~图11 (f)、图13(e)~图13 (f)分别为各算法高程反演误差图。对于连续地形,4种方法皆可以基本恢复出原始高程,其中,ML算法恢复的高程图中密布杂乱的噪声群,表明其抗噪性能差,高程反演误差较大。TV+MAP算法反演的高程图中仍存在杂乱的噪声点,难以准确还原高程。GC算法的恢复效果较为良好,但图11(c)中仍有无法正确反演的区域,即如图11(g)黄色框所示。MCFCF Net获得的高程与原始高程图最为接近,几乎没有明显可见的噪声点。对于城市不连续地形,3种传统算法仍然存在鲁棒性不强的缺点,在突变区域处误差较大,相对地,MCFCF Net的高程反演较为贴近原始高程图,误差主要集中在突变区域边界处,误差范围较小。针对突变地形,图13(a)中全局出现了范围较大的高程误差,且有十分明显的分散噪声点,而图13(b)中同样存在杂乱的噪声点,从整体来看ML算法、MAP+TV算法的鲁棒性不强,图13(c)中左半区域有成片的重建错误区域,即如图13(g)黄色框所示,造成高程反演误差较大。
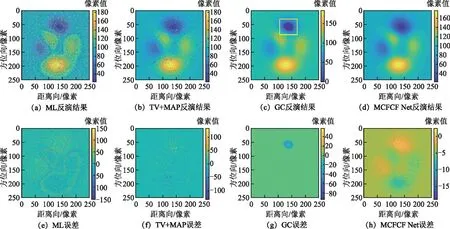
图11 Peaks地形高程反演实验结果

图12 城市建筑A地形高程反演实验结果

图13 LONG’S地形高程反演实验结果
MCFCF Net的反演效果图如图13(d)所示,误差主要集中在右侧突变区域处,左半区地形恢复程度良好。表4为4种方法对3组干涉图高程重建30次的平均误差结果和平均运行时间对比。可以看出MCFCF Net在保持高精度的同时,时间消耗亦极小。

表4 各算法性能对比
4 结束语
本文方法以MCFCF Net为框架,利用深度学习神经网络强大的函数拟合能力建立多通道干涉图与高程图的映射关系,实现了从多幅干涉图到高程图的直接映射关系,有效解决了复杂地形尤其是不连续地形的高程反演问题。在多类地形的高程反演实验中,该方法都能获得较为稳定和精确的结果。同时,与ML、TV+MAP和GC算法相比,MCFCF Net能更充分利用多通道InSAR系统不同基线数据潜力,使其高程反演的精度和效率大幅提升,在不同场景与不同信噪比的地形高程反演中展现了良好的泛化能力与稳定性。
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
中等数学(2022年5期)2022-08-29 06:07:38
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
当代陕西(2020年23期)2021-01-07 09:24:44
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
石油地球物理勘探(2017年4期)2017-12-18 07:14:55
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
CHIP新电脑(2016年3期)2016-03-10 14:22:03
全球定位系统(2015年4期)2015-02-28 12:38:13
