基于倾斜摄影技术的国内外建模软件比较研究
2024-01-04 02:36甘文霞胡小弟肖安娜高云龙
武汉工程大学学报 2023年6期
甘文霞,柴 靓,何 朝,章 翌,胡小弟*,肖安娜,高云龙
1. 武汉工程大学土木工程与建筑学院,湖北 武汉 430074;2. 中建三局第二建设工程有限责任公司,湖北 武汉 430000;3. 武汉光谷建设投资有限公司,湖北 武汉 430205;4. 湖北交通投资集团有限公司,湖北 武汉 430050;5. 武汉大势智慧科技有限公司,湖北 武汉 430223
随着“实景三维中国”计划的不断推进,无人机制造技术和计算技术迅速发展,传统的三维建模技术已经无法满足大规模快速建模的需求,以倾斜摄影和激光扫描为代表的三维测绘相关技术是测绘行业未来的重点方向[1]。倾斜摄影测量能够利用多传感器,获取多角度图像,快速生成实景三维模型[2]。国内外现有基于倾斜摄影测量的自动三维建模软件较多,但各软件的操作方式、生产效率、模型精度等方面不同,导致其在实际项目中的实用性、适用性以及模型质量存在差异。因此学者针对不同三维建模软件进行了对比研究:张懂 庆 等[3]对Smart3D 2019、Mirauge 3D、Context Capture 3 种倾斜摄影建模软件的硬件配置、软件操作性、空中三角测量质量、模型质量等进行对比,得出Smart3D 2019 建模软件的空中三角测量通过率、精度和模型质量均较高,且输出模型格式多。 杨 云 峰 等[4]对Context Capture、Agisoft PhotoScan 及Pix 4D Mapper 3 种倾斜摄影建模软件的操作性、运算时长、模型质量等方面进行对比,结果表明Context Capture 在水平方向与垂直方向对误差的控制较好,三维模型精度优于其他2款软件。王建[5]将传统软件与Context Capture 生产出的模型进行对比,结果表明Context Capture生产出的模型质量好、精度高,且较传统方法效率高。 杨 文 府 等[6]用Context Capture 软 件 和PhotoMesh 软件对杀虎口古长城场景进行三维建模,比较2 种软件的空三精度,得出Context Capture 软件的空三精度更高。卢亚龙[7]将Pix 4D Mapper 软件和EPS 软件对比,两种方式生产的地形图成果均满足1∶1 000 成图要求。钟雷文[8]用大疆智图和Context Capture 软件对校园场景进行三维建模,通过对建模质量进行分析得出大疆智图软件在细节处理方面较优于Context Capture软件。
目前,国内倾斜摄影自动化三维建模主要以国外软件为主,国内已经涌现出如重建大师、大疆智图等自主软件。本文将以国产三维建模软件与Context Capture 等软件进行硬件要求、操作性、模型精度及效果对比分析。
1 倾斜摄影测量技术概述及常用软件
1.1 倾斜摄影测量技术
倾斜摄影测量是一种通过在飞行平台上搭载多台传感器,同时从垂直、多个倾斜角度获取目标物数据和纹理信息的新型技术[9-10],再经过影像同名点匹配、空三加密、不规则三角网构建、表面贴图等内业处理建立精细化、真实化的实景三维模型[11-12]。倾斜摄影实景三维建模流程如图1 所示。目前常见的倾斜摄影测量系统是由无人机飞行平台搭载相机组成,相机在同一曝光点获取地面物体多角度数据,此时飞行平台中的位置与姿态系统(position and orientation system,POS)可记录每张相机曝光瞬间的位置姿态、GPS 坐标等信息。该系统能够获取地物全方位信息,为后续三维重建提供良好的数据基础[13]。
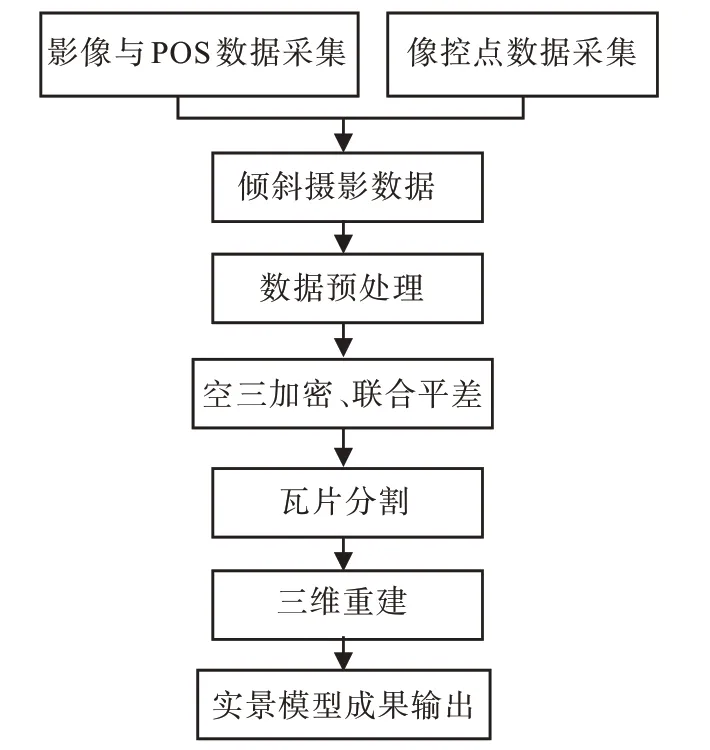
图1 实景三维建模流程Fig.1 Process of real 3D model production
1.2 软件基本信息介绍
目前业界常用的倾斜摄影三维建模软件有美国Bentley 公 司 的Context Capture、瑞 士Pix4D 公司的Pix 4D Mapper,中国大疆创新公司的大疆智图以及大势智慧公司的重建大师等。4 款软件以数码相片、航拍照片、激光点云组成的多源数据作为输入,后经内业处理生成高精度实景三维模型。Context Capture 和Pix 4D Mapper 是目前被用户广泛使用的三维建模软件[14]。大疆智图除支持三维重建,还提供自主航线规划、飞行航拍等应用。重建大师是专为超大规模实景三维数据生产而设计的集群并行处理软件。
2 技术路线与评价指标
2.1 技术路线
本文首先阐述了无人机倾斜摄影技术的概况和4 款仿真软件的基本信息,其次根据现场采集的影像数据,严格控制各个输入参数,利用4 种软件进行三维重建,最后对软件的硬件配置、操作性、模型精度和模型效果进行对比,如图2 所示。
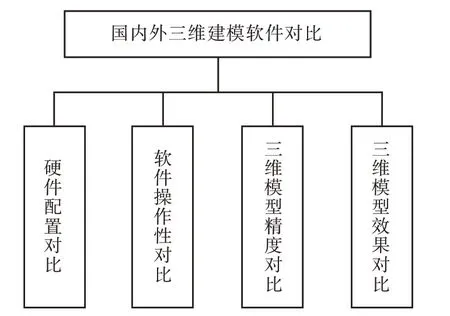
图2 软件对比工作流程Fig.2 Workflow for software comparison
2.2 评价指标
本文参考国家《三维地理信息模型数据产品规范》,并根据实景三维模型特点,从模型精度和模型效果对建模成果进行评价。
2.2.1 模型精度评价 模型精度评价包括平面中误差、高程中误差,详见表1、表2。
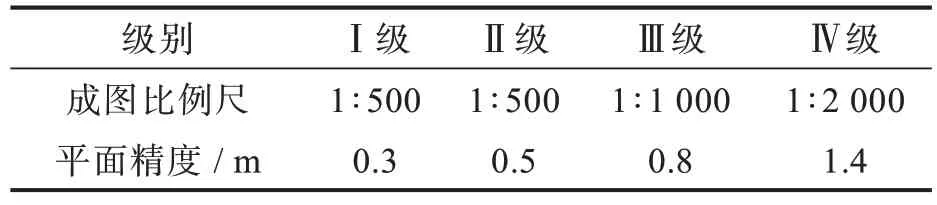
表1 平面精度Tab.1 Planar accuracy
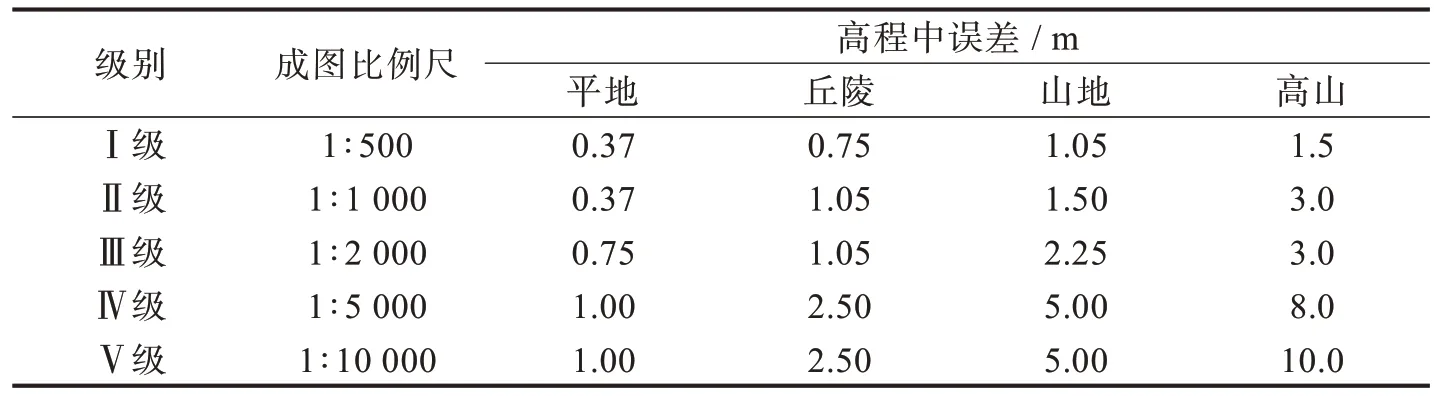
表2 地形精度规范Tab.2 Terrain accuracy standards
2.2.2 模型效果评价 本文模型效果评价包括对模型精细度和纹理精细度2 方面的检查。模型的精细度是核查分析模型是否存在结构比例失调、扭曲变形、附属细部遗漏等一系列与实际不符的情况,如路面是否平整、水域是否有凹凸等。纹理的精细度是检查模型纹理是否有模糊、错误、失真、变形,相同地物纹理不同、纹理间不协调、纹理数据存在不合理缝隙等问题,如房屋密集区域是否有异常纹理。
3 研究区域与数据
本文以湖北省武汉市新洲区京广线沙河大桥为试验区域,面积约0.45 km2,如图3(a)所示。该区域地形较为平坦,沙河大桥两侧树木茂盛,测区内以村落、农田与河流为主。本次航摄采用大疆精灵4 RTK,如图3(b)所示,设定航向重叠度70%,旁向重叠度70%,相对航高100 m,地面分辨率为2.7 cm,共获取影像691 张和与其对应的POS数据。采用标靶板制作像控点,在测区范围内均匀布设共30 个,布设时用手机拍摄照片并将位置信息在图片上标记,方便查找时使用[15],如图3(c)所示。测量仪器为中海达Ubase,如图3(d)所示,利用网络实时动态测量技术(real time kinematic,RTK)量测像控点,坐标系统为国家CGCS2000 坐标系,填写像控点成果表。

图3 测区概况及数据采集:(a)研究区域,(b)大疆精灵4 RTK,(c)像控点,(d)中海达UbaseFig.3 Overview of study area and data collection:(a)study area,(b)DJI phantom4 RTK,(c)photo control point,(d)Hi-Target Ubase
4 处理流程及模型质量对比
4.1 软件使用
4.1.1 硬件配置对比 4 款软件对电脑硬件配置要求见表3,均为官方规定最低配置要求。通过表3可以看出,4 款软件在硬件配置要求上由高到低依次为重建大师、Context Capture、大疆智图、Pix 4D Mapper。
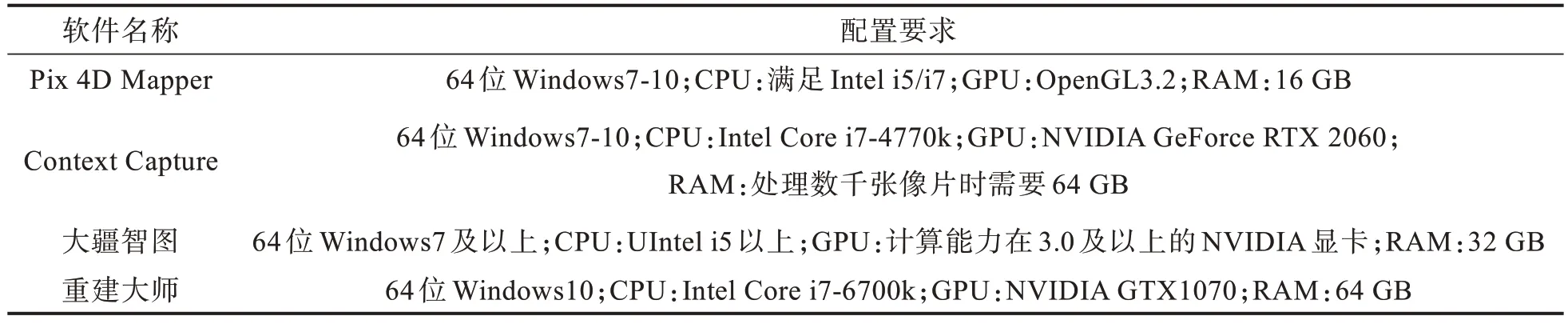
表3 硬件配置要求Tab.3 Requirements of hardware configuration
4.1.2 操作性对比 4 款软件数据处理流程及对比见表4,由表4 可知各软件特点如下:(1)Context Capture 和重建大师的操作界面与逻辑较为相似,软件操作步骤多且复杂,在进行编辑控制点与添加边界约束操作时需要人员具备相关专业知识。Pix 4D Mapper 与大疆智图软件操作简单,按软件提示进行操作即可完成重建任务。(2)大疆智图和重建大师支持中英文项目名称和储存路径,其余2款软件仅支持英文。(3)在进行刺点操作时,Context Capture、大疆智图与重建大师3 款软件均能够自动提示控制点预测位置和数据误差较大的刺点操作,使刺点更加方便、准确。(4)在计算时长方面,Pix 4D Mapper 在软件运算上耗时最短,其次是Context Capture,大疆智图计算时间稍长,运行时间最长的是重建大师。具体使用时应根据人员配备、计算资源及时效要求进行软件选择。
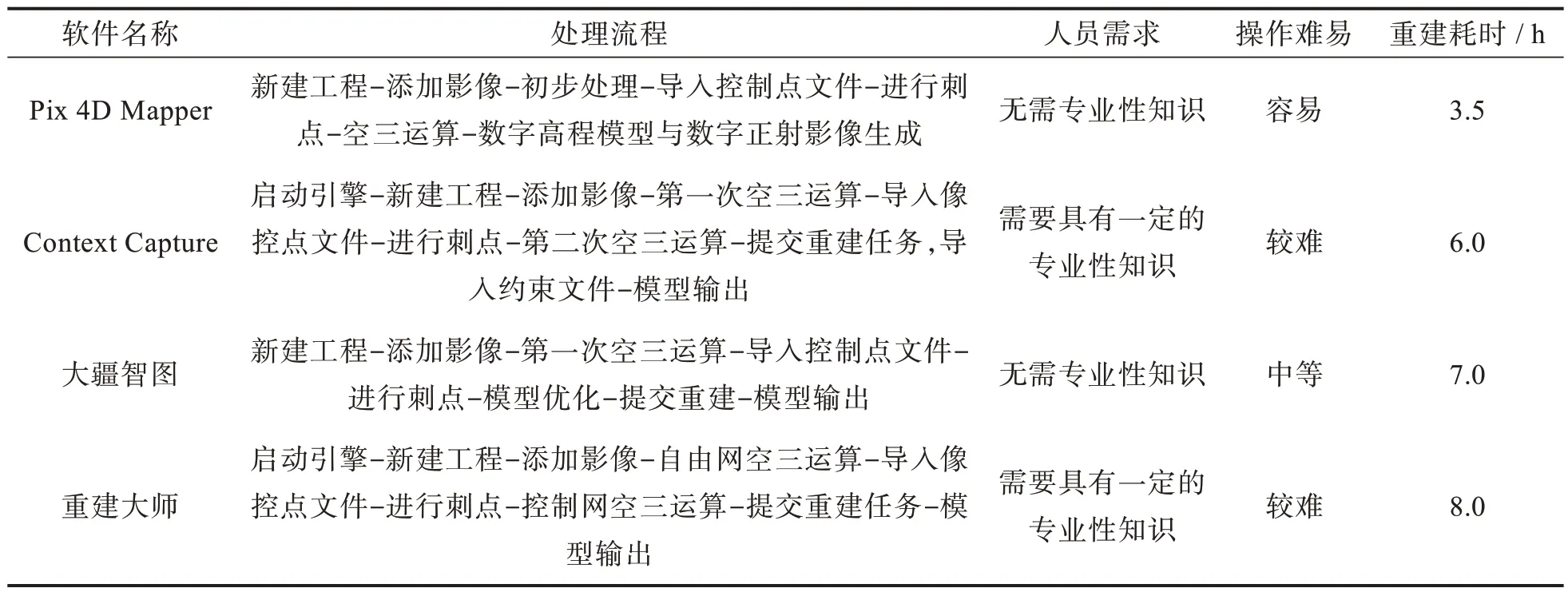
表4 软件操作性对比Tab.4 Comparison of software usability
4.2 模型质量对比
4.2.1 模型精度分析 用户通过分析实景三维模型可以得到真实场地的三维坐标信息,因此三维模型精度能否满足要求非常重要[16]。本文共采集30 个像控点,其中1 个像控点地面标识被移动不予分析,剩余29 个点中选用11 个点用作空三计算的控制点,18 个点用作精度检测的检查点。将其外业实测坐标看作真值,多次量测检查点在模型上对应位置的坐标,并取平均值与真值进行对比,其结果见图4。
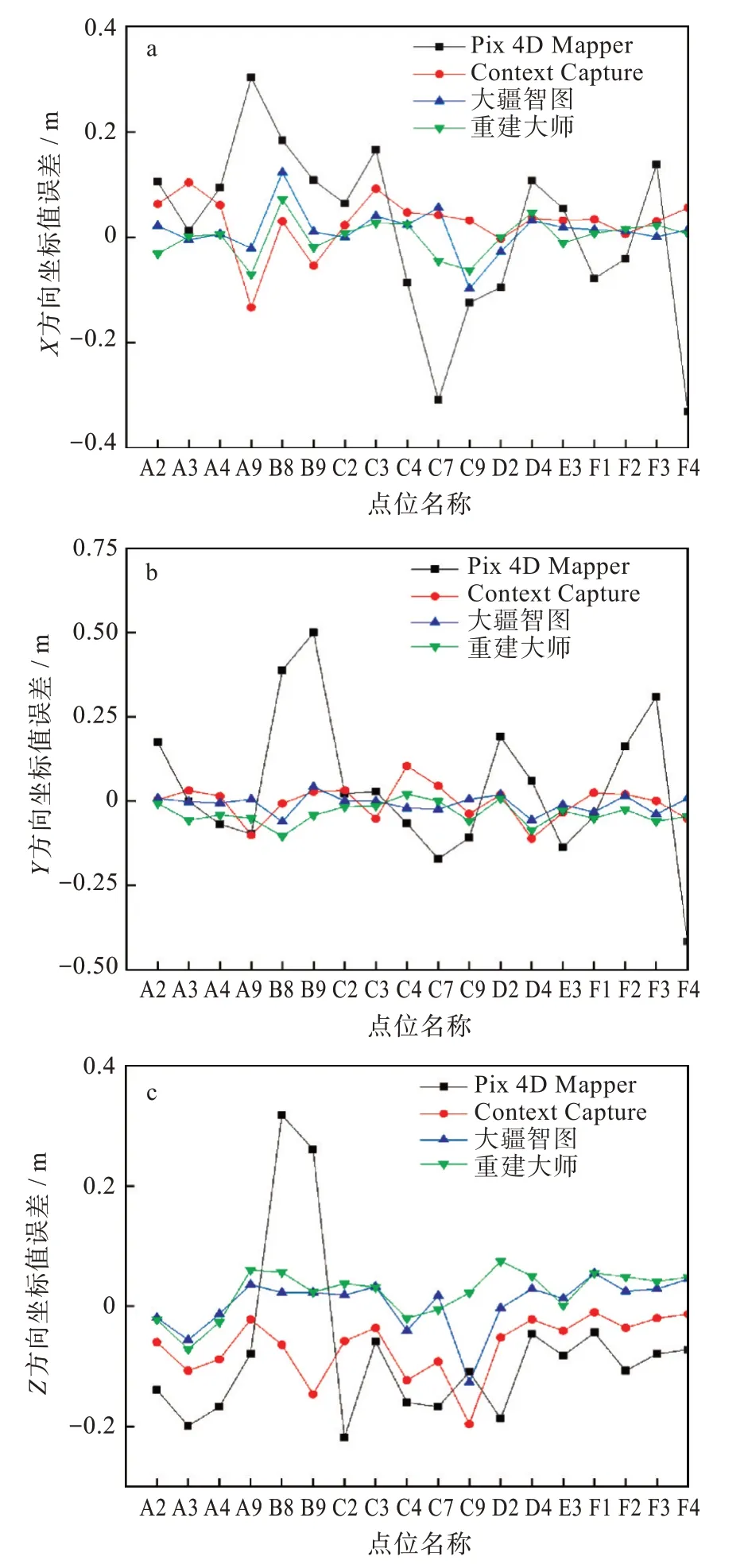
图4 检查点误差分析:(a)X 方向,(b)Y 方向,(c)Z 方向Fig.4 Analysis of checkpoint errors:(a)X-direction,(b)Y-direction,(c)Z-direction
根据三维模型X、Y、Z方向的坐标值误差,计算出各软件三维模型的平面中误差及高程中误差,如表5 所示。
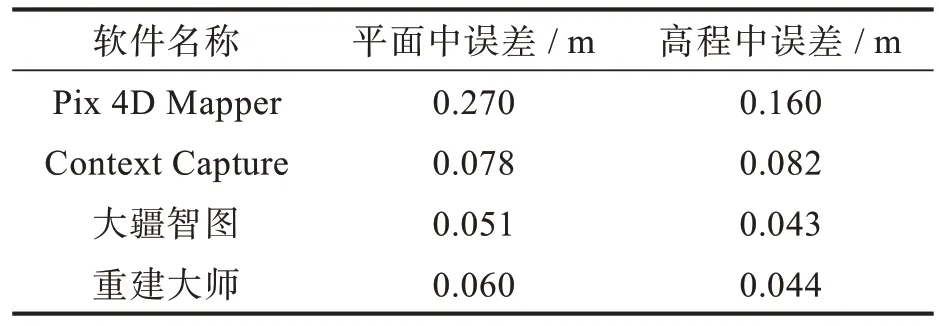
表5 三维模型精度统计Tab.5 Statistical analysis of 3D model accuracy
根据国家《三维地理信息模型数据产品规范》比例尺为1∶500 的平面中误差与高程中误差分别为0.50 m 和0.37 m,4 款软件生成的模型均符合精度要求。4 款软件平面中误差最大的是Pix 4D Mapper、最小的是大疆智图,高程中误差最大的是Pix 4D Mapper、最小的是重建大师和大疆智图。
4.2.2 模型效果对比 基于本文上述前提,对所选择的试验区主要从水域、房屋、道路3 个方面进行模型效果对比。
(1)水域建模对比
三维建模软件以实际航拍图像为纹理信息,能够仿真目标场景的颜色及纹理,但水体由于光线反射,易造成其三维模型产生空洞现象,因此需针对水域模型效果进行分析。本研究区域中4 款软件的水域建模如图5 所示。Pix 4D Mapper、Context Capture 和大疆智图的模型存在凹痕,且Pix 4D Mapper 的模型空洞较为明显且无法反应真实水体情况,而重建大师处理后的水体模型较为完整、调色均匀,模型效果优于其他3 款软件。
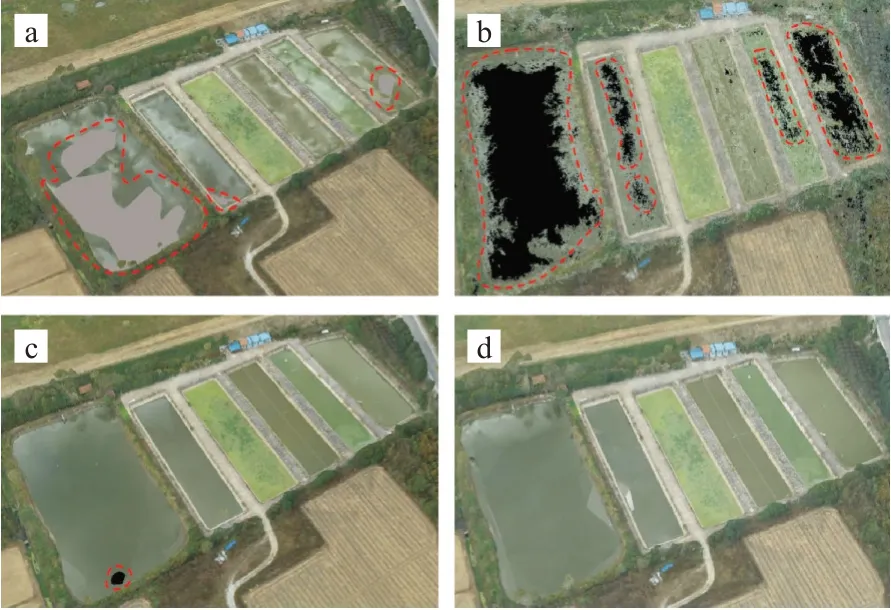
图5 水域建模结果:(a)Context Capture,(b)Pix 4D Mapper,(c)大疆智图,(d)重建大师Fig.5 Results of water area modeling:(a)Context Capture,(b)Pix 4D Mapper,(c)DJI Terra,(d)G3D
(2)房屋建模对比
4 款软件都能对房屋的整体样貌进行重建,纹理映射符合实地情况,如图6(a-d)所示。大门、雨棚和护栏构件目标较小且纹理单一,采集影像重叠率小、分辨率低,导致软件在特征点提取与匹配时易出现错误,因此需针对上述构件模型效果进行分析。本研究区域中4 款软件大门、雨棚和护栏构件建模如图6(e-h)所示,4 款软件生成的大门三维模型均出现了破损。针对雨棚和护栏构件,Pix 4D Mapper 未能重建三维模型,大疆智图和重建大师生成的三维模型出现扭曲变形,Context Capture相比其他3 款软件较好地重建了模型结构。

图6 房屋建模结果:(a、e)Context Capture,(b、f)Pix 4D Mapper,(c、g)大疆智图,(d、h)重建大师Fig.6 Results of house modeling:(a,e)Context Capture,(b,f)Pix 4D Mapper,(c,g)DJI Terra,(d,h)G3D
(3)道路建模对比
道路建模结果如图7 所示,除Pix 4D Mapper外,其余3 款软件对地面道路标识、部分道路损伤等部分重建较为清晰。由于指示牌结构简单、纹理单一、受树木等物体的遮挡,在进行空中三角测量时,不能确保特征点的数量,同时,在网格拓扑创建和处理时,面片之间连接错误,造成形状破坏、空洞。Context Capture 软件能够完整重建道路指示牌,其余3款软件重建模型出现不同程度的缺损。
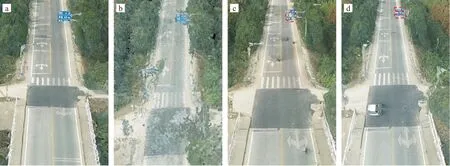
图7 道路建模结果:(a)Context Capture,(b)Pix 4D Mapper,(c)大疆智图,(d)重建大师Fig.7 Results of road modeling:(a)Context Capture,(b)Pix 4D Mapper,(c)DJI Terra,(d)G3D
5 结 论
总结现有研究和用户单位关注点,从硬件要求、可操作性、模型精度和模型效果对4 款倾斜摄影测量软件进行了对比分析,得到了如下结论:(1)4 款软件在各方面表现不同,Context Capture与重建大师硬件要求高,运算时间长,Pix 4D Mapper 和大疆智图相较于其他2 款软件操作更为简单,无需操作人员有相关专业知识。(2)各建模软件均能重建0.45 km2实验区域全貌,重建大师软件能够较好地修补水域模型,针对纹理单一物体Context Capture 生成的三维模型结构较为完整。(3)4 款软件均能满足1∶500 的三维模型产品标准,且重建大师和大疆智图2 款软件在水平方向与垂直方向对误差的控制较好,三维模型精度优于其他2 款软件。以上研究结论能为倾斜摄影测量软件在实际工程中的应用提供参考作用,从软件选型方面提高倾斜摄影测量建模作业效率。
猜你喜欢
北京测绘(2023年1期)2023-02-23
汽车观察(2022年12期)2023-01-17
江苏安全生产(2022年5期)2022-06-16
计算机应用文摘·触控(2021年20期)2021-11-11
华人时刊(2021年23期)2021-03-08
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
焦点(2018年10期)2018-01-28
Coco薇(2017年8期)2017-08-03
北方音乐(2017年4期)2017-05-04