基于MTLBO和ELM的沥青路面抗滑性能预测
2024-01-03 13:47王海涛沈平高博
西南大学学报(自然科学版) 2024年1期
王海涛, 沈平, 高博
中交第二公路勘察设计研究院有限公司,武汉 430056
随着我国经济的高速发展,国家在道路建设方面投入了大量资金,城市道路特别是高速道路的建设为GDP的不断增长做出了突出贡献.目前,我国公路网的总规模已经位居世界前列,公路总里程约为450万公里,其中高速公路网里程为14.26万公里,公路总长度居世界第一[1-2].
截至2022年6月,我国机动车保有量达4.06亿辆[3].在交通网络中,我国车流量密度较大且道路情况复杂,在驾车行驶过程中往往易出现突发情况.尤其是在城市快速道路和高速公路中,面对车速快和行驶过程中的突发情况,需要驾驶员更好地操控他们的车辆,这意味着路面需要给车辆提供较大的摩擦力.根据道路碰撞分析表明,路面摩擦系数每提高0.1,雨天事故率可以降低13%[4].
从车辆出行安全的角度来看,路面抗滑性能十分重要.沥青道路在长时间的服役中,路面的三维形貌会发生相应的变化,从而导致路面抗滑性能的改变,在道路路面的评估过程和道路后期养护中越来越受到社会的关注.为确保人们的出行安全,公路机构必须保证道路网络中路面能够保持足够的摩擦力水平,因此有必要对道路的三维形貌进行特征提取,并筛选出与路面抗滑性能相关的特征参数,对路面抗滑性能进行准确预测,进而对路面抗滑性能维护提出指导性建议.
目前,许多科研人员围绕沥青路面长期服役中路面三维形貌的变化导致抗滑性能的演变开展了大量的研究工作.Ding等[5]利用制备的不同颗粒高度路面样板,进行三维激光扫描并测量其抗滑数值,将采集到的路面三维形貌信息进行处理,获取其表面积,然后利用路面表面积去研究抗滑性能,以探究何种颗粒能提供最大抗滑性能.由于路面抗滑性能与路面多项特征参数相关,只考虑路面三维表面积指标较为单一.Kassem等[6]开发了路面摩擦损失的预测模型,该模型利用统计分析的手段建立起骨料形状特征、骨料耐磨和抛光性、骨料级配和抛光周期的参数与路面摩擦抗滑之间的多元线性模型,但线性模型评估多模态因素对路面摩擦力的预测可能会受到遗漏变量偏差的影响.战友等[7]使用三维激光扫描技术对路面行车道轮迹带进行扫描,获取其4类表面三维纹理参数,利用随机森林回归模型将路面摩擦与纹理特征建立联系,由于随机森林模型不能超出训练数据范围外进行预测,这将导致在建模过程中出现过度拟合的现象.杨喜英等[8]利用混凝土耐磨试验机开展露石混凝土路面的加速磨耗实验,对混凝土路面的抗滑衰减曲线进行绘制,该实验仅仅探究了路面抗滑衰减的规律,并没有进一步开展抗滑性能预测的研究.刘亚敏等[9]建立了基于遗传算法的SMA路面抗滑性能预测模型,由于初始值的设置对于优化模型的最终效果影响较大,若选择不当,很容易使优化陷入局部收敛,所以该预测模型具有调参困难的缺点.
上述对于路面抗滑性能预测的研究都存在特征变量单一、可用数据少等问题,甚至有些研究直接利用统计分析建立线性模型.面对可用数据样本少的情况,现有的传统预测模型在模型稳定性、泛化能力和预测结果准确性方面都存在一定的不足.
极限学习机(ELM)能够通过调整输入层、隐藏层和输出层之间的相关参数,建立输入变量与输出变量之间的非线性映射关系,具有训练时间短、所需参数少、泛化能力强等优点[10].改进教学优化算法(MTLBO)能够不断轮换“最优解”,使局部搜索能力得到提高[11],通过引入该优化算法对ELM输入层和隐藏层间的权重和偏置进行优化,进而可以提高ELM预测结果的准确性.因此,本文通过室内模拟道路抗滑性能衰变实验,获取各项关键性能指标,并利用MTLBO-ELM模型对沥青路面抗滑性能随时间的衰退规律进行预测和评价.
1 理论描述
1.1 极限学习机(ELM)

图1 极限学习机的结构
传统的神经网络(Neural Network,NN)技术在速度和准确性方面存在一定的缺点,因此Huang等[12]提出了名为极限学习机(ELM)的一种单层前馈网络.ELM通常由1个输入层、1个隐藏层和1个输出层组成,如图1所示.输入层和隐藏层之间的权重(ωi)和偏置(bi)是随机固定的,这种方法减少了计算时间,降低了复杂性,因此其学习速度要比其他传统前馈网络更快.隐藏神经元用不同的激活函数激活,通常使用高斯激活函数.
ELM输入层、隐藏层和输出层的节点数分别为n、L、m,有N个不同的样本(xi,ti),其中输入xi=[xi1,xi2,…,xin]T∈Rn,期望的输出ti=[ti1,ti2,…,tim]T∈Rm,h(x)为激活函数并在式(1)中描述.
(1)
式中:βi=[βi1,βi2,…,βim]T为第i个隐藏节点到输出节点之间的输出权重矩阵;Yj为ELM的输出.式(1)可以由式(2)简单表达.
Hβ=T
(2)
式中:T为目标输出矩阵;H为隐藏层的输出矩阵,如式(3)所示.
(3)
输出权重矩阵可以用式(4)表示:
β=H+T
(4)
式中:H+为矩阵H的Moore-Penrose广义逆矩阵.
β是对预测准确性影响最大的因素,完全取决于ωi和bi.根据样本的数据特征,通过优化算法决定ωi和bi而不是随机选择,可以提高ELM的效率.在本文中与路面抗滑性能相关性最大的6个宏观纹理参数被视为输入,路面抗滑性能指标BPN被视为ELM预测的目标.
1.2 教学优化算法(TLBO)
教学优化算法(Teaching-Learning-Based Optimization,TLBO)是由Rao等[13]基于课堂活动而提出的新型智能算法,其原理是教师对学习者的影响效应.像其他基于群体的优化技术一样,教师被认为是到目前为止获得的最佳解决方案[14].这一算法主要分为2部分: 教阶段,即向老师学习; 学习阶段,即通过学习者之间的互动来学习.
1.2.1 教阶段

(5)
式中:rand为[0,1]上的随机数;Tf为教学因子,决定要改变的平均值,Tf的取值为1或2.这是一个启发式的步骤,以相等的概率随机决定,如式(6)所示.
Tf=round(2×rand)
(6)
式中:round代表四舍五入取整.
1.2.2 学习阶段
在学习阶段,学习者可以在其他学生的帮助下提高自己的知识水平,以提高平均成绩.如果共同学习者与自己相比知识更丰富,学习者就可以扩大自己的知识[15].学生之间改变立场的互动在式(7)中描述.
(7)
1.3 改进的教学优化算法(MTLBO)

(8)
式中:Avgi,sec是一个特定部分学生的平均成绩.
通过这种方法,该算法的局部搜索能力得到了加强,这有助于增加解决方案的多样性.在TLBO算法中,所有的学生都朝一个方向(朝向教师)迁移,这可能会误导整个班级,这个问题可以通过分配部分教师来解决[11].
在TLBO算法的学习阶段,学生们通过相互交流不断地修正教师的位置,式(7)通过纳入教师的优势而被修改为式(9).
(9)
在每次迭代中,一些呆板的学生会被其他一些学生淘汰(随机初始化学生).学生的淘汰在式(10)和(11)中描述.图2为MTLBO算法的流程图.
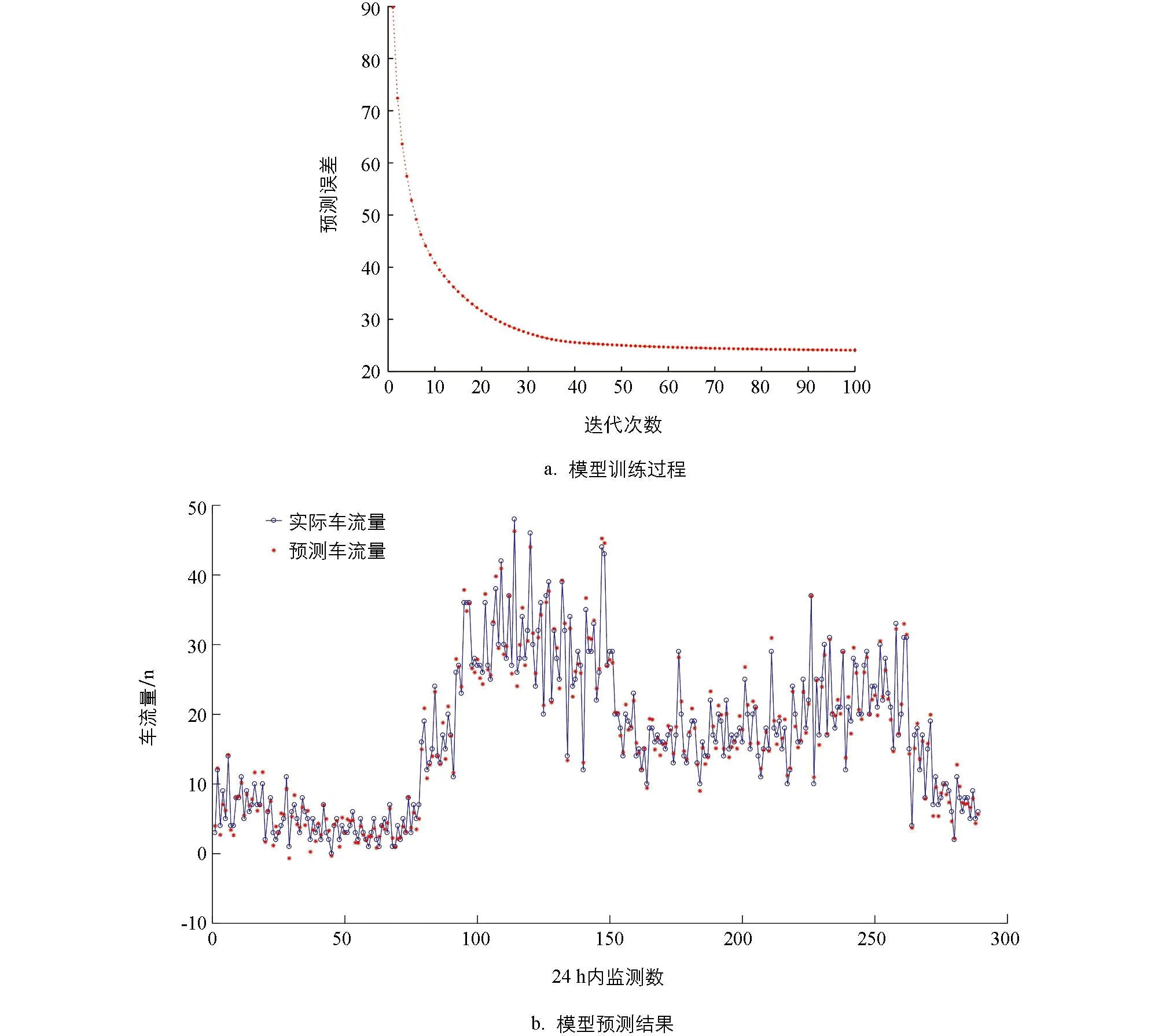
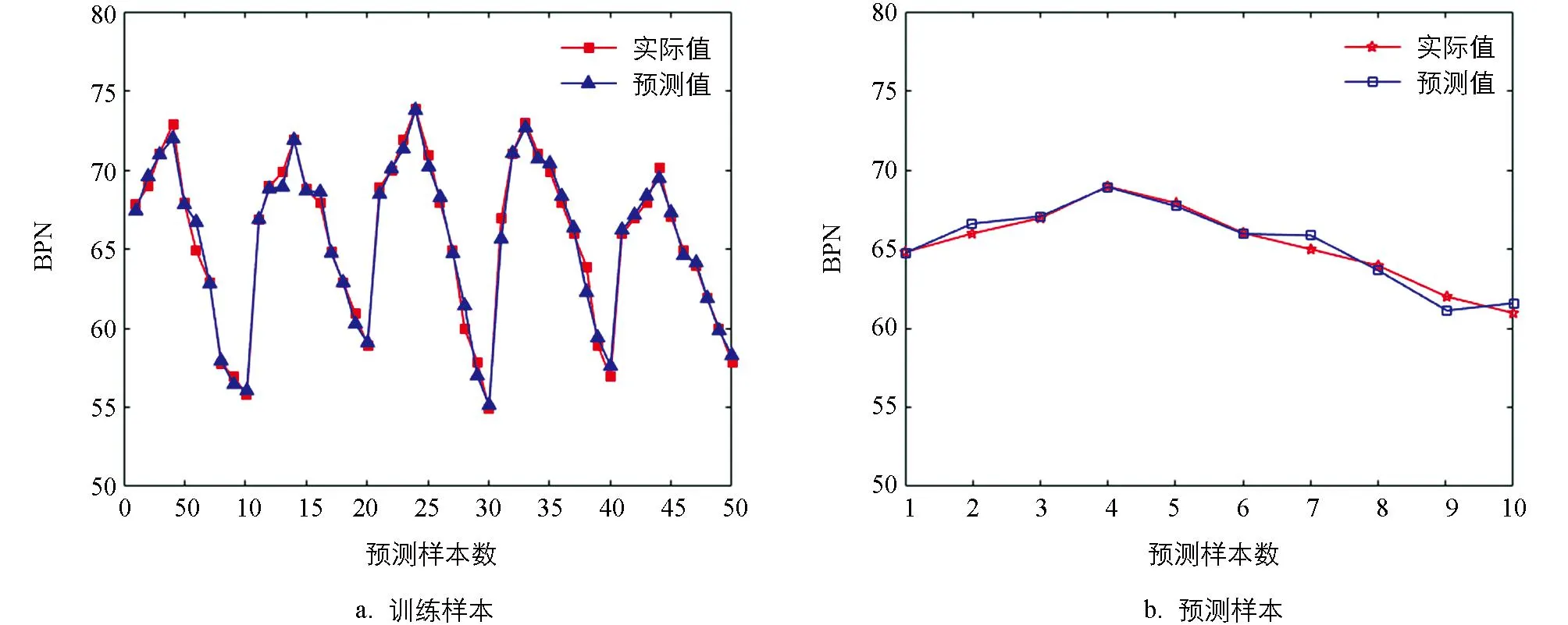
N=find(f(XT)+ot) (10) Xi(N)=LB+rand×(UB-LB) (11) 式中:N为要淘汰的学生人数;Xi(N)是要考虑的新学生;LB和UB是下边界和上边界;ot是一个常数,与迭代的次数成比例衰减. 图2 MTLBO算法流程图 ELM通常是分类和回归的首选,其性能比NN更好.ELM的性能可以通过适当地调整相关的输入权重、偏置和隐藏神经元的数量来提高.因此,本文通过MTLBO算法适当决定ELM的相关输入权重和偏置来最小化预测误差. MTLBO-ELM预测模型中优化算法只在训练ELM模型时使用.ELM的相关参数是在训练模型期间由MTLBO优化算法决定,使得预测误差最小.MTLBO的首要目标是通过适当选择ELM的输入层权重和偏置实现训练误差最小化,具有这些参数的ELM模型被用于测试数据集. 图3 MTLBO-ELM预测流程示意图 本文利用MTLBO方法优化ELM模型参数的流程如图3所示,选取路面试样随时间变化的宏观纹理表征指标平均断面深度Mpd、断面算数平均值Ra、断面标准差Rq、极差Rz、驼峰度Rku、偏斜度Rsk作为MTLBO-ELM的输入,抗滑性能BPN作为MTLBO-ELM的输出,即预测量.在模型训练过程中将ELM预测的BPN与真实值之差输入到MTLBO的优化算法中,从而实现动态调整ELM输入层与隐藏层之间的权重和偏差,通过MTLBO优化算法获得的参数能够有效提高ELM预测的泛化性和准确性. 为验证本文所提出模型的有效性,首先选取某道路交通流量数据进行车流量预测.本文一共采集了1年内的交通流量数据,每隔5 min记录1次该时间段内的车流量数据.本文截取5 d的车流量数据,利用前4 d的车流量数据训练MTLBO-ELM模型,最后用训练好的MTLBO-ELM模型去预测第5 d的车流量.同时利用相同的数据集通过SVM、ELM和TLBO-ELM进行训练,并预测第5 d的车流量. 表1 不同预测模型对交通流量数据的精度比较 图4为MTLBO-ELM模型训练过程和预测结果,表1给出不同预测模型对交通流量数据的精度比较.表1中MTLBO-ELM模型的RMSE为0.583 7,R2为0.935 9,在对比模型中其评价指标最好,由此可见MTLBO-ELM模型的泛化能力较强.因此,通过交通流量数据集预测结果,证明了MTLBO-ELM模型的有效性,为接下来的道路表面抗滑性能预测奠定了基础. 图4 MTLBO-ELM模型训练过程和预测结果 沥青路面在经过车辆的反复碾压之后,沥青表面的沥青膜剥落,路面骨料裸露出来,路面的抗滑性能到达峰值; 继续经过车辆的反复碾压,骨料被抛光,路面抗滑性能出现一定的衰退.为研究这一衰变过程的规律,在实体道路上长期监测路面的抗滑性能有诸多限制,因此本文通过加速加载器在实验室内模拟路面抗滑性能衰变的过程. 为了能模拟出在车辆反复碾压下真实路面抗滑性能的变化,本实验采用了MMLS3载荷模拟器,图5为其实物图.该设备可以在7 200次轮载/小时、2.7 kN的最大轮载下进行实验.将试样放入该设备中,到达相应轮载荷次数后,将试样取出,完成各项指标的记录,将试样放回并进行下个阶段的载荷实验[16]. 根据某道路的沥青比配比制作了6个路面试样,其中一试样如图6所示.加速加载器的加载参数设置为5 200次轮载/小时,小轮与路面试样间的压力为标准轴载0.7 MPa.按照表2所示的记录周期对试样进行监测.为了能够真实还原路面的使用情况,在各个加载周期内按照实际道路的养护标准进行洒水养护,从而能够真实地体现出路面抗滑性能的衰变过程[17]. 图5 MMLS3载荷模拟器 图6 路面试样 将路面样本在不同轮载荷次数下的表面变化直观记录下来,如图7所示.在图7中可以明显地观察到路面试块的颜色和抛光度发生了明显的变化. 表2 监测记录 图7 不同轮载次数下的试样 沥青路面纹理可以用多种指标来进行表征,主要指标如表3所示.本文只利用与路面抗滑性能相关性最大的纹理指标构建预测模型. 沥青路面主要有BPN和横向力系数(Sideway Force Coefficien,SFC)两项抗滑指标来表征路面抗滑性能[18],本文所要预测的抗滑指标BPN由摆式仪测得.摆锤的回摆高度可直接从仪器上读出,即摆值的大小.我国规定高速公路、一级公路的BPN一般大于45[19]. 对表3中的各项路面纹理指标与BPN进行相关性分析,筛选出如下路面纹理指标用来对BPN进行多元预测. 表3 特征指标 (1) 平均断面深度Mpd (12) 根据ISO13743-1规定在计算Mpd时断面的水平长度需要超过100 mm,将断面分为2部分,式中peak(1st)为第1部分的峰值;peak(2nd)为第2部分的峰值;Average为整个断面的平均高度. (2) 断面算数平均值Ra (13) (3) 断面标准差Rq (14) (4) 极差Rz Rz=max(Z)-min(Z) (15) (5) 驼峰度Rku (16) (6) 偏斜度Rsk (17) 为了进一步表明图7的微观变化,将其中某一试样的各项相关性指标的变化曲线表示出来,如图8所示.从图8的曲线中可以明显地观察到路面随着轮载次数的增加,其纹理特征值和BPN也会发生明显的变化. 选取实验当中路面试样随时间变化的宏观纹理表征指标平均断面深度Mpd、断面算数平均值Ra、断面标准差Rq、极差Rz、驼峰度Rku、偏斜度Rsk作为MTLBO-ELM的输入,抗滑性能BPN作为MTLBO-ELM的输出,即预测量.用前5组路面试样的监测数据作为模型的训练,最后一组路面试样的监测数据作为测试,即训练样本数为50,预测样本数为10. 图8 各项指标变化曲线 本文使用了3种常用的预测方法进行比较,即支持向量机SVM,极限学习机ELM,基于教学优化的极限学习机TLBO-ELM.图9为3种常用预测模型的预测结果.图10为本文所提出的MTLBO-ELM模型的预测结果. 为了定量评价本文提出方法与其他常用模型对多因素影响下沥青路面抗滑性能预测结果的好坏,本文用均方根误差(RMSE)和预测样本复相关系数(R2)作为定量分析的指标.表4为各预测模型的预测结果精度比较. 由表4可知,ELM模型在路面抗滑性能预测上比SVM有更出色的表现,进一步通过优化算法探索ELM的相关参数,TLBO-ELM的性能得到了提高.本文所提出的MTLBO-ELM模型的RMSE为0.5032,R2为0.95.从评价指标的角度,本文提出的MTLBO-ELM预测模型在路面抗滑性能预测方面具有更好的性能. 图9 3种常用不同模型预测的结果 表4 不同模型预测结果的精度比较 图10 本文提出MTLBO-ELM模型的训练和预测结果 1) 采用MMLS3加速加载实验装置模拟了6个沥青路面试样在车辆载荷作用下微观纹理、抗滑性能BPN、外貌形状和颜色的变化规律.实验结果表明,沥青路面在建设完成投入使用的前期,因车轮的反复碾压,表面的沥青剥落,骨料裸露,导致抗滑性能增加; 随着碾压次数的加大,表面骨料被抛光,抗滑性能出现一定的下降; 2) 利用沥青路面的宏观纹理指标平均断面深度Mpd、断面算数平均值Ra、断面标准差Rq、极差Rz、驼峰度Rku和偏斜度Rsk去预测路面抗滑性能指标BPN,具有可行性; 3) 通过对基本TLBO算法中的教阶段和学习阶段进行改进,进一步提高了TLBO算法的局部搜索能力.利用改进的TLBO算法优化ELM预测模型的相关参数,固定具体参数后的ELM在路面抗滑性能预测方面性能出色.该模型对沥青路面抗滑性能的评价具有一定的指导意义.
2 基于MTLBO和ELM的路面抗滑性能预测模型

3 数值模拟分析

4 道路抗滑性能衰变模拟实验
4.1 加速加载器
4.2 模拟实验


4.3 模拟实验结果


5 沥青路面表征指标
5.1 沥青路面纹理表征指标
5.2 路面抗滑性能指标
5.3 路面指标筛选


6 实验结果分析



7 结论
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08
疯狂英语·新悦读(2019年11期)2019-12-18
工程与建设(2019年2期)2019-09-02
凿岩机械气动工具(2017年3期)2017-11-22
电力自动化设备(2015年4期)2015-09-28
专用汽车(2015年4期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
凿岩机械气动工具(2014年3期)2014-03-01
筑路机械与施工机械化(2014年2期)2014-03-01
天津冶金(2014年4期)2014-02-28