基于PCA降噪的改进型CLAHE算法
2024-01-02 08:35张学典王文明
软件导刊 2023年12期
张学典,王文明
(上海理工大学 光电信息与计算机工程学院,上海 200093)
0 引言
计算机视觉系统的成功很大程度取决于图像质量,因为它决定了信息检索和解释的准确性,图像质量差会给目标识别、分割和特征提取带来很大阻碍。由于从实时环境中捕获的图像存在对比度差的问题,在这些图像中对比度更集中在某些区域的特定范围,导致边缘较弱或信息丢失[1]。因此,为了保存图像所有信息,对图像的对比度进行操作或优化至关重要。
有效去除图像噪声,提升图像质量,使机器和人都能清楚理解图像是图像处理中最重要的基本步骤。然而,仅对图像对比度进行单方面增强无法保证图像质量,原因为外部干扰或其他光线等原因会使图像产生大量噪声,将严重影响图像质量,导致图像大量细节难以被准确识别[2]。为此,本文提出利用主成分分析法对图像进行降噪处理,采用改进型的限制对比度自适应直方图方法来提升图像质量。
1 相关工作
图像增强是提升图像质量的重要处理技术之一,具体为将一个输入图像转换成另一个图像以改善视觉外观,或增加图像对比度使细节更明显[3]。直方图均衡化(Histogram Equalization,HE)[4]是图像增强技术中常用的方法,通过修改图像直方图分布、拉伸图像灰度的动态范围,同时限制对比度来减少图像失真。
然而,HE 会在全局范围内增加对比度,因此图像仍存在部分位置较暗,还会增强背景噪声[5]。自适应直方图均衡化(Adaptive Histogram Equalization,AHE)[6]在常规直方图均衡算法的基础上将图像划分为几块进行处理,但缺陷在于过度放大了图像平滑区域的对比度,可能会在这些区域产生噪声伪影。对比度受限自适应直方图均衡化算法(Contrast Limited Adaptive Histogram Equalization Algorithm,CLAHE)[7]对区域对比度进行限制,利用插值加快计算能有效增强或改善图像局部对比度,从而获取更多图像相关边缘信息,有利于后续分割操作。同时,CLAHE 还可提供一个剪辑限制,声明直方图的最大高度和区域大小,剪辑限制值的范围为0~1,值越高表示对比度越高。
目前,许多算法已被开发用于图像质量增强[8-11],但在大量噪音影响下突出对比度分布不均匀的图像信息是一项具有挑战性的任务。Perona 等[12]提出经典的各向异性扩散滤波器,但在如何设计和选择扩散率函数方面,并未给出统一的理论基础,一般根据经验或将扩散方程与其他理论模型结合来选择扩散率函数[13,14]。
为此,本文提出一种基于PCA 降噪的改进型的各向异性扩散滤波器的模糊裁剪对比度受限自适应直方图均衡化(ADFS-CLAHE-FC)图像增强方法,旨在去除图像噪声、增强图像对比度、保持图像的细节。同时,将该方法与现有标准增强算法在信息熵、MSE、PSNR 方面进行定量分析。结果表明,通过该方法增强的图像具有合适的视觉亮度和清晰的细节,在各评价指标中表现良好且稳定。
2 图像去噪
在图像去噪领域,为了解决上述全局性问题和背景噪声增强问题,黄勇[15]提出一种用于图像对比度增强的自动CLAHE。由于自动CLAHE 自适应增强每个块的对比度亮度,能有效增强黑暗图像和有强烈黑暗阴影的日光图像,在视觉质量和定量措施方面优于最先进的方法。Yue等[16]采用Bregman 分割算法和CLAHE 对基于图像内部分解的对比度增强进行研究,提出在分解模型中引入图像固有分解进行对比度增强,该方法相较于现有方法可获得更好或相当的主观和客观质量,但仅能用于增强对比度,无法适用于改变表面纹理等技术。Haung等[17]提出一种自动变换技术改变直方图,以提升数字图像对比度,通过亮度像素的伽马校正和概率分布提升变暗图像的亮度,利用关于每帧间差异的时间信息来降低计算复杂度。Shakeri 等[18]提出一种基于局部直方图均衡的对比度增强算法,该算法的特点是确定子直方图个数,根据饱和度对直方图进行分离,以产生自然的图像和增强对比度,但缺点是在图像亮度高的情况下容易丢失细节,输出图像中仍然存在噪声。
综上,基于直方图、频率、模糊、滤波器的图像增强技术的案例分别为直方图均衡化(HE)[4]、对比有限自适应直方图均衡化(CLAHE)[7]、递归平均分离直方图均衡化(Recursive Mean Separation Histogram Equalization,RMSHE)[19]、基于模糊裁剪逻辑的增强[20-22]。
3 基于PCA 的对比度受限自适应直方图均衡化图像增强算法
首先对图像进行灰度处理,利用PCA 对图像降噪,然后使用CLAHE 对图像进行增强处理,如图1所示。
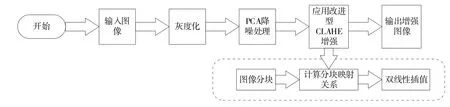
Fig.1 Algorithm Flow图1 算法流程
3.1 主成分分析
图像去噪技术可提升模型的分割和识别性能,然而由于噪声类型和噪声污染程度不同,传统图像去噪方法可能会导致图像丢失,出现边缘和细节模糊的问题。主成分分析(Principal Component Analysis,PCA)是一种最优的降维和特征提取技术,通过线性变换将原始数据转化为线性无关表示形式,在降维的同时不仅可最大程度保留数据特征,还能有效去除图像中存在的噪声[23],为后续图像分类或识别等任务提供基础。目前,PCA 已广泛应用于计算机视觉、机器学习、数据挖掘等领域。
PCA 算法主要思想[24]是通过投影将n维特征映射到k维上,k维是在原有n维特征基础上重构的k维特征,即主成分。在PCA 投影过程包含了零计算过程,目的是寻找所有图像的均值后减相减,并计算训练图像集的协变矩阵,得到协方差矩阵后进行约简步骤,训练图像将变换到较低维数并以准确性形式得到结果,从而实现数据特征降维。
3.2 基于各向异性扩散滤波器的模糊裁剪对比度受限自适应直方图均衡化
为了提升图像质量,本文通过直方图来增强亮度范围、对比度、锐度等参数。直方图均衡化算法(HE)被广泛应用于增强处理后的数字灰度图像[25],这类算法的实质是根据给定图像概率分布函数调整半色调图像层次,增大亮度分布的动态范围,从而增强视觉效果,例如亮度、对比度、锐度和清晰度。图像概率分布函数如式(1)所示。
式中:P(i)为亮度i出现的概率,即原始图像直方图的归一化函数;j为处理后图像的像素坐标;H(j)为变换后的图像。
直方图均衡算法包括局部(自适应)直方图均衡算法和全局直方图均衡算法。其中,全局方法首先建立一个图,然后均衡化整个图像的直方图;局部方法构造很多直方图,每个直方图只对应一部分处理过的图像,该方法增强了图像的局部对比度,总体上可获得较好的处理效果。然而,HE算法是对图像进行全局均衡,会使图像中较暗区域在均衡处理后亮度拉的过高,出现噪点直接变成白色的情况。
自适应直方图均衡算法(AHE)在HE 的基础上,将图像划分为几块进行处理,每一块图像统计了各自的分布函数,以更好地处理图像数据的局部细节[26],但由于对图像分块进行处理将降低图像处理效率,并使图像呈现出被切割为几块的效果。
限制对比度自适应直方图均衡算法(CLAHE)在AHE、HE算法的基础上进行优化,是一种能提供剪辑限制和区域大小的图像增强方法[27]。限制对比度相当于限制直方图的幅度,在直方图上给出边界值可解决对比度增加过多的问题。通常情况下,限制值称为剪辑限制值,即表示直方图的最大高度,计算直方图的剪辑限制如式(2)所示。
式中:M表示区域大小;N表示灰度值256;α为剪辑因子。
CLAHE 的流程是从区域大小和剪辑限制的初始化开始,计算每个区域的直方图形状;然后通过剪辑限制切割直方图,将多余部分(剪辑限制值被认为是多余的)分配到另一个直方图;接下来将新的直方图映射到图像上;最后在相邻区域内进行像素插值,生成最终的CLAHE 图像。裁剪示意图如图2 所示。CLAHE 算法示意图如图3所示。
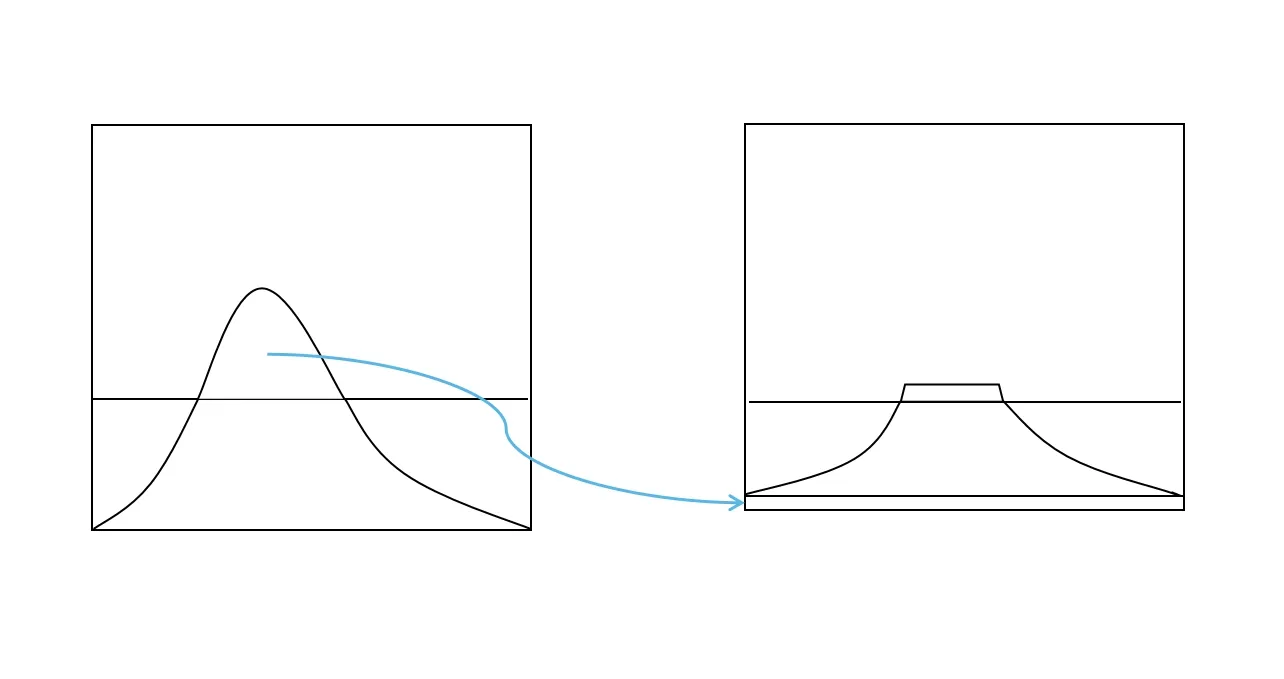
Fig.2 CLAHE crop图2 CLAHE裁剪
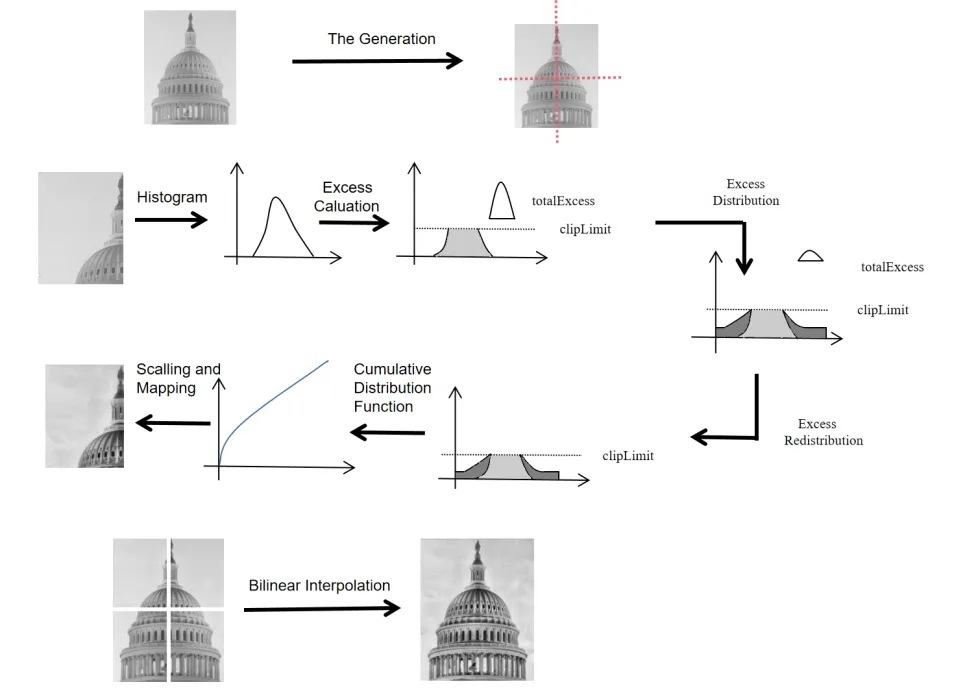
Fig.3 CLAHE algorithm图3 CLAHE算法
3.2.1 模糊裁剪
CLAHE 将输入图像划分为几个不重叠的子图像进行剪辑,以限制图像增强数量。裁剪直方图通过减少或增加输入图像值,参考阈值或均衡前的裁剪限制来改变输入图像的结构。
式中:i、j表示图像中像素的空间坐标;P(i,j)表示可能结果的概率。
本文使用的模糊裁剪[20-22]可自动选择裁剪极限,输入为对比度C和空间熵E两种变量,输出为模糊裁剪增强参数(fβ)。其中,C 的模糊集为Low(V1)、Medium(V2)、High(V3),E 的模糊集为Small(W1)和Big(W2)。利用三角隶属函数构造模糊裁剪的规则,将fβ分为裁剪极小值CL1 和裁剪极大值CL2。所有FC 输出的每个规则值被聚合到单一模糊集合中。
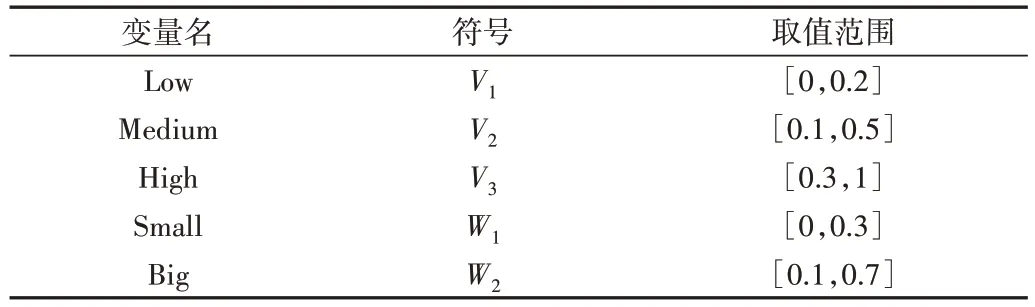
Table 1 Fuzzy set variables and their value ranges表1 模糊集变量及其取值范围
FC-CLAHE 方法计算依赖输入图像的C、E的裁剪极限值,如式(5)所示。
式中:fβ为模糊裁剪增强参数(0~0.1);[]表示截断值最接近的整数;φ 为像素块大小的乘积;256 表示像素强度值的范围为0~255。
3.2.2 改进型各向异性扩散滤波器
本文根据上述定义,使用统计学解释模型改进原来的扩散滤波器。传统边缘检测算子包括Sobel 算子、Roberts算子等,他们都是一种估计函数,具备相似的统计意义[28]。本文受Perona、Malik 启发,直接使用图像局部梯度模值作为边缘估计函数,设计了改进型各向异性扩散滤波器(ADFS),即基于梯度统计量的各向异性扩散滤波器,估计函数如式(6)所示。
式中:∂u/∂x、∂u/∂y分别为水平和垂直的边缘检测一阶微分算子,是图像在x、y方向的导数。
扩散率函数[29]如式(7)所示。
式中:变量δ为控制扩散率变化的阈值,当边界估计值小于该值时扩散率较大且变化较快;反之,扩散率逐渐趋向于零。
改进型扩散滤波器的数学模型如式(8)所示。
式中:δ与扩散率函数中的功能相似,通常情况下该值与图像噪声强度相关,可采用CLAHE 方式进行计算,即用噪声估计子方法计算δ值。
需要注意的是,如果在局部对比度较大的区域,δ值可取较大的值。在实验部分,为了简便计算,本文在局部对比度变化不大的图像中将δ值置为常数。此外,本文使用各向异性系数阻止图像边缘上的扩散现象,提出ADFS 模型可表示为:
式中:div(.)、∇为散度算子和梯度算子;为边缘停止机制的还原函数,在调节扩散机制中具有重要作用。
此外,两个递减函数如式(10)所示。
式中:k为阈值,如果|∇I|>k,像素被认为是边缘,不会被模糊;反之,像素被认为是内部区域,将被高度平滑。
4 实验结果与分析
4.1 定性结果
为了验证算法的有效性进行噪点图像增强对比实验,比较HE、CLAHE、Singh 融合算法、Retinex 算法、基于PCA降噪的改进型CLAHE 算法在不同图像上的去噪音增强效果。所有算法均在Pycharm 平台上实现,使用的图片来自Sklearn 数据集、ExDark 数据集和CS6640 项目,其中Sklearn数据集为Python 中的机器学习库,提供了很多不同数据集,例如玩具数据集,鸢尾花样本,手写数字数据集等;Ex-Dark 数据集由专门在低光照环境下拍摄的低光照片组成;CS6640 项目来自康奈尔大学一门关于计算在摄影中的新兴应用的课程。
由图4(a)可见,原始图像噪声较多,难以辨认图像的数字,从直方图中也可看出图像的灰度集中在右侧部分,整张图片过亮。图4(b)经过HE 变换后直方图仍过度增强,灰度较为集中且图像引入了大量噪声。由图5(b)、图6(b)中均可看出,图像在经过HE 增强后仍存在大量噪声。由图5(h)、图6(h)可见,直方图灰度集中在一个区域。
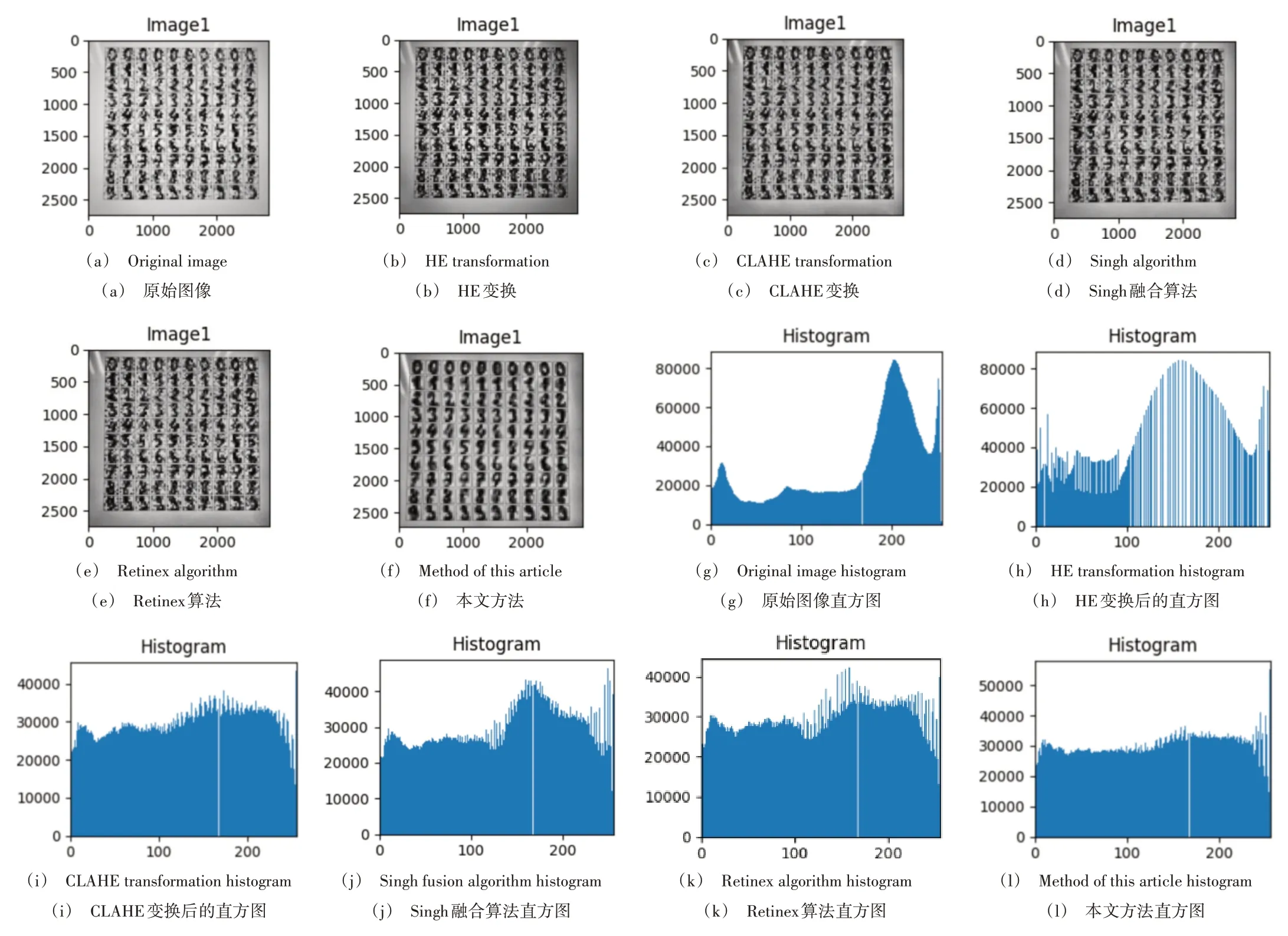
Fig.4 Before and after effects of various methods on image 1图4 在图片1上各种方法前后效果
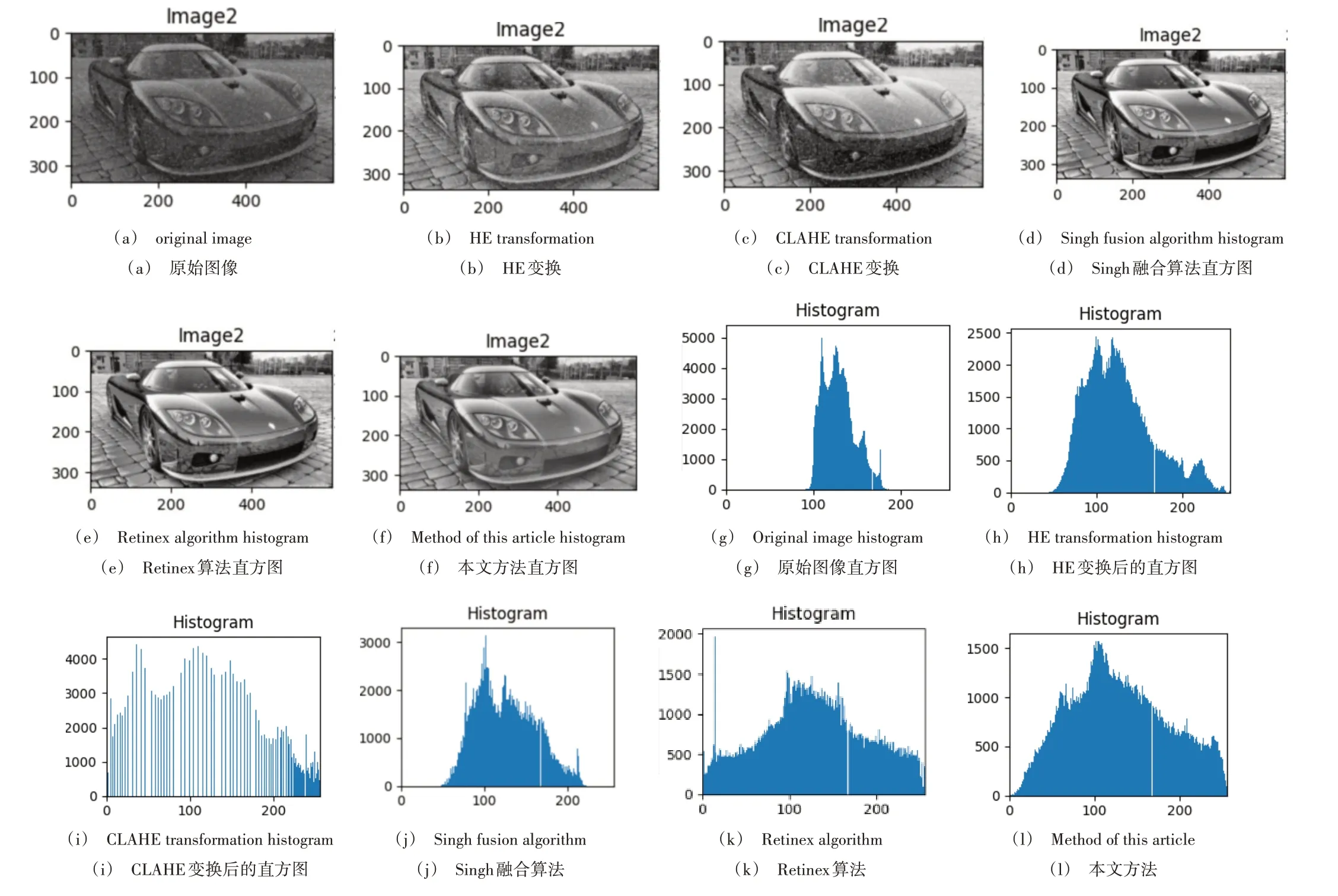
Fig.5 Before and after effects of various methods on image 2图5 在图片2上各种方法前后效果

Fig.6 Before and after effects of various methods on image 3图6 在图片3上各种方法前后效果
由图4(i)—图6(i)可见CLAHE 方法弥补了上述方法直方图不均衡的缺陷,处理后的图像灰度范围适中、分布均衡,图像既未过度增强也不失真,但图4(c)即使进行了图像增强,数字仍然不清晰,图5(c)、图6(c)存在明显噪点。
为了进一步与现有较好方法进行比较,本文引入Singh 融合算法和Retinex 算法进行实验。由图5(d)、图5(e)可见,使用两种算法后生成的图像相较于原图噪点有所减少。由图5(j)、图5(k)可见,未均衡化的直方图相较于原图与CLAHE 方法得到了明显改善,但在其他数据集中Singh 融合算法和Retinex 算法仍存在图像噪声多的缺点,如图4(e)所示。
综上,由于这3 组图像均在未去噪的情况下进行图像增强处理,方法效果较差,数字难以辨认,为后续图像识别、分割带来了难度。然而,本文方法解决了Singh 融合算法和Retinex 算法方法的两个缺陷,图像上的数字、轮廓清晰可见(见图4(f)、图5(f)、图6(f)),直方图上的灰度分布均匀(见图4(l)、图5(l)、图6(l)),在视觉上效果非常好。
4.2 定量结果与分析
由图4—图6 可见,基于PCA 降噪的改进型CLAHE 方法效果最好,变换后的图像直方图灰度范围适中,图像得到有效增强,图像细节清晰可见。
虽然,其他方法的直方图分布范围和图像清晰度并不理想,但仅依靠视觉感官仍然无法有效说明算法的有效性。
为了解决上述问题,本文使用信息熵、均方误差(Mean Squared Error,MSE)和峰值信噪比(Peak Signal to Noise Ratio,PSNR)这3 个指标,在上述3 个场景对PCA 降噪方法的有效性进行有效、客观地比较分析[30]。其中,信息熵描述了一个事件的不确定性[31];信息熵表示随机变量不确定的度量,是对所有可能发生事情产生的信息量的期望,熵越大代表图像细节越丰富,信息内容越多;MSE[32]是预测数据和原始数据对应点误差的平方和的均值,值越小表示两幅图像的差异越小,反之差异越大,具体计算公式为:
式中:yi为真实数据为拟合数据;n为样本的个数。
PSNR[33]是一种衡量图像增强技术的指标,表示信号的最大可能功率与影响输出信号噪声功率间的比值。不同增强技术对不同图像的PSNR 值如表2 所示。由此可见,本文方法相较于其他普通的图像增强方法PSNR 值更高,证明了该指标可用来衡量降噪效果,具体计算公式为:
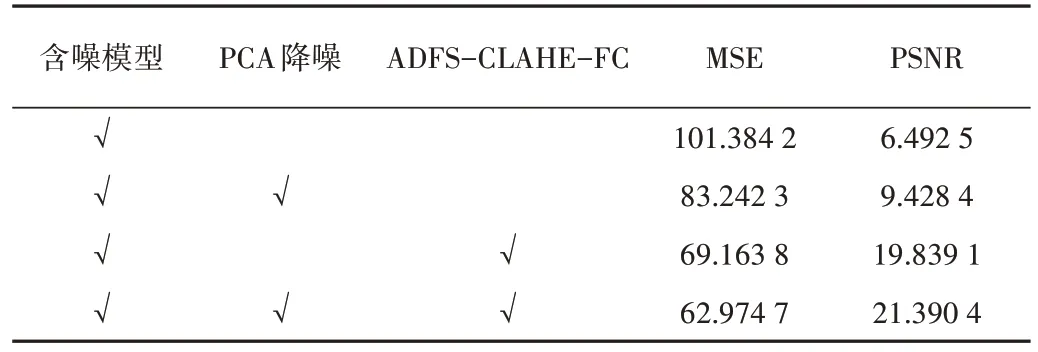
Table 2 Results of ablation experiments on each module of image 1表2 图像1各模块消融实验结果
式中:m表示图像中一个像素能取得的最大值。
一般而言,图像经过处理后信息熵越大,包含的信息量越大,MSE 越小说明处理效果越好,PSNR 值越大说明处理效果好。
4.2.1 消融实验
首先,本文分别对PCA、ADFS-CLAHE-FC 模块进行比较实验,依据PSNR、MSE 指标衡量降噪效果和图像质量,结果如表2所示。
由表2 可知,在PSNR 指标中,PCA 降噪、ADFS-CLAHE-FC 相较于含噪模型提升2.935 9 dB、13.346 6 dB,联合两种方法后提升14.897 9 dB;MSE 指标中PCA 降噪、ADFS-CLAHE-FC 相较于含噪模型降低18.141 9 dB、32.220 4 dB,联合两种方法后降低38.409 5 dB。实验表明,分别使用PCA 降噪和ADFS-CLAHE-FC 方法后均能有效提升图像质量。
4.2.2 其他方法比较实验
表3 为图4—图6 中3 幅图像经过HE 变换、CLAHE 变换、Singh 融合算法和Retinex 算法处理[34-35]、基于PCA 降噪的改进型CLAHE 变换后的信息熵、MSE、PSNR。实验结果表明,基于PCA 降噪的改进型CLAHE 算法能有效降低噪声,提升图像有效信息。

Table 3 Quantitative results of image 1-image 3表3 图像1—图像3的定量结果
本文选取多个数据集中100 个存在噪点的图像,表4展示了这100 个图像分别进行HE 变换、CLAHE 变换、Singh 融合算法和Retinex 算法处理及基于PCA 降噪的改进型CLAHE 变换后得到的信息熵、MSE、PSNR。结果表明,基于PCA 降噪的改进型CLAHE 变换处理后的图像信息熵、MSE、PSNR 最优,证明了本文方法能有效降低噪声,提升图像对比度,增强图像有效信息。

Table 4 Average of 100 images表4 100张图像均值
5 结语
本文提出一种基于PCA 降噪的改进型限制对比度自适应直方图均衡化图像增强算法。通过主成分分析方法去除图像噪音、提升图像质量,然后使用改进的限制对比度自适应直方图均衡化方法对降噪后的图像进行增强处理,拉伸图像灰度的动态范围。
通过观察该方法处理的效果图发现,本文方法不仅抑制了大量噪声、视觉效果更好,还突出了图像的更多细节。此外,采用信息熵、MSE、PSNR 对所提方法和现有方法的性能进行评价,结果表明该方法可为各种图像提供更好的增强效果,提升图像检测类任务的可检测性。
然而,实验发现目前方法在不同灰度、彩色的自然图像测试时,会受到冲刷现象和不良伪影的影响,无法稳定取得良好的图像增强效果。未来,将对此进行改良,以增强模型的鲁棒性和实用性。
猜你喜欢
一重技术(2021年5期)2022-01-18
燃气涡轮试验与研究(2021年6期)2021-08-01
海洋信息技术与应用(2020年4期)2021-01-18
中国生物医学工程学报(2019年5期)2019-07-16
测控技术(2018年4期)2018-11-25
北京航空航天大学学报(2017年3期)2017-11-23
中国卫生(2015年1期)2015-11-16
电机与控制应用(2015年2期)2015-03-01
物探化探计算技术(2015年2期)2015-02-28
电测与仪表(2014年13期)2014-04-04