
水翼辅助推进船舶运动响应分析
2024-01-01 00:00:00邝伟浚王冬姣
广东造船 2024年3期







摘" " 要:水翼辅助推进是利用水翼吸收船舶在波浪中摇荡运动的能量从而降低波浪增阻并提供额外推力的技术,其中绕水翼的环量流动对水翼所产生的力与力矩有着重要影响。为此,利用ANSYS-AQWA结合源面元分布法与平板摇荡翼速度环量力理论解,对安装有固定翼的S175船运动响应进行了数值模拟。计算结果表明,水翼能显著降低船舶在迎浪中航行时船舶的运动响应。
关键词:水翼辅助推进;运动响应;速度环量力;ANSYS-AQWA
中图分类号:U661.1" " " " " " " " " " " " " " " " " 文献标识码:A
Analysis on Motion Response for Hydrofoil-Assisted Propulsion Vessels
KUANG Weijun," WANG Dongjiao
( South China University of Technology," Guangzhou 510641 )
Abstract: Hydrofoil-assisted propulsion refers to the technology of absorbing the energy of the ship's motion in waves through hydrofoils to reduce the wave added resistance of the hull and provide additional thrust, in which the circulatory flow around the hydrofoils has an important effect on the generated forces and moments. For this purpose, numerical simulations of the motion response of the vessel S175 with fixed hydrofoils were carried out through ANSYS-AQWA in combination with the source distribution method and the theoretical solution of the oscillating flat-plate hydrofoil circulatory flow force. The computational results demonstrated that hydrofoils can significantly reduce the motion response of the vessel when sailing in head waves.
Key words: hydrofoil-assisted propulsion;" motion response;" circulatory flow force;" ANSYS-AQWA
1" " "引言
随着船舶运输行业的碳排放要求逐渐提高,可应用于船舶的可再生能源推进技术得到了进一步的发展。水翼辅助推进技术通过在船底安装一到多对水翼,当船舶在波浪中航行时,水翼随船体作摇荡运动,绕水翼的环量流动可产生前向的推力辅助船舶推进,此外,水翼还能减小波浪中船体的摇荡运动幅值,从而降低船体的波浪增阻,可进一步地降低主机的功率需求。
船舶利用波浪推进的概念很早便被提出,早在1898年,英国工程师Linden便提出了在船舶艏艉部安装水翼以利用波浪能航行的概念[1]。近年来国内外也有不少企业和学者对水翼辅助推进船舶进行了模型与实船的数值模拟及实验研究。2019年,挪威公司Wavefoil[2]在M/F Teistin号渡轮的船艏安装了一对可收回的辅助推进水翼,实际营运报告在实船上减少了平均10%的燃料消耗,与此同时,Wavefoil公司基于可回收波浪水翼提出了一系列的水翼辅助推进的概念设计,并将其投入市场运营。在可预见的未来,水翼辅助推进技术将能得到进一步的应用与发展。
对于波浪中水翼随船舶运动产生推力的机理,很早便有学者为此展开了研究。1972年,Wu[3]提出了利用摇荡翼从流场中提取能量的可能性; Isshiki[4]在Wu的基础上考虑了自由表面效应与水翼浸深造成的影响,并对最佳效率下水翼的纵摇及垂荡方向的运动参数作了定量研究。2016年,林丰等人[5]利用基于CFD理论模拟了安装于无人艇上的固定式水翼的推进性能,表明水翼纵摇与垂荡之间的相位差对水翼所产生的推力有着重要影响,Wang等人[6]对安装艏艉水翼的双体艇运动响应进行了数值模拟与模型试验。结果表明,对于在艏艉安装对称水翼的波浪推进艇,波长与船长之比显著地影响了波浪水翼的推进效率。
本文通过将源面元法与摇荡翼环量力与力矩的理论解相结合,提出了一种基于势流理论的水翼辅助推进船舶运动响应分析方法,通过对安装有固定翼的标准船模运动响应进行数值模拟,探讨了固定翼对船体运动响应的影响。
2" " "理论基础
2.1" "坐标系定义
为描述波浪中航行船舶的运动,引入以下三个坐标系:空间固定坐标系ooxoyozo固定于流场中,原点位于未扰动的静水面上,zo轴垂直向上,在ooxoyo平面上的入射波传播方向与xo轴之间的夹角β称为波向角。参考坐标系o'x'y'z'随船一起以平均航速U沿xo轴移动,原点o'位于未扰动的静水面上,z'轴垂直向上。固连于船体的坐标系oxyz,原点o位于船舶重心,x轴位于船体纵剖面并指向船艏,z轴垂直于船体水线面。三个坐标系之间的关系如图1所示。当船体处于初始平衡位置时,参考坐标系o'x'y'z'与空间固定坐标系ooxoyozo重合,参考坐标系的z'轴与船体坐标系的z轴重合,船体坐标系原点在参考坐标系中的垂向坐标为zG,三个坐标系之间的转换关系可表示为:
x0= Ut+x',x'≈xG+x" " " " " " " " " " " " " " " " " " " " "(1)
y0= y',y'≈y" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "(2)
z0= z',z'≈zG+z" " " " " " " " " " " " " " " " " " " " " " " " "(3)
船体坐标系与参考坐标系中(o, o, zG)的相对位移(η1,η2,η3)分别表征了船体的纵荡、横荡与垂荡运动;船体坐标系与参考坐标系之间的相对角位移(η4,η5,η6)分别定义了船体的横摇、纵摇、艏摇运动。
2.2" "含固定翼的船舶运动方程
假设流场为无粘不可压缩流,安装了固定翼的船舶在波浪中航行时的运动方程可表示为:
(4) 式中:M为包括固定翼在内的船体总质量矩阵;A为附加质量矩阵;B为辐射阻尼矩阵;CV是考虑流体粘性作用的线性粘性阻尼矩阵,本文选取18%的垂荡临界阻尼与15%的纵摇临界阻尼作为粘性阻尼修正量;K是静水刚度矩阵;F(t)为波浪扰动力矩阵;η(t)为船舶运动响应位移矩阵," " nbsp;与" " " 分别表示速度和加速度矩阵;N表示水翼对数;Fn(t)是由第n对作摇荡运动的水翼引起的环量力矩阵。
利用势流理论中的源面元法,计算相对于固定翼和船体合成重心的波浪扰动力矩阵F(t)、附加质量矩阵A和辐射阻尼系数矩阵B。在迎浪和随浪规则波中摇荡翼产生的环量力与力矩在下节给出。
2.3" "迎浪和随浪规则波中摇荡翼产生的环量力
当摇荡翼在规则波中运动时,其遭遇频率ωe可表示为:
ωe =ω- kU cos β" " " " " " " " " " " " " " " " " " " " " " " " " " "(5)
式中:β = 0表示随浪,β = π表示迎浪工况;ω为波浪圆频率;k为波数,在深水条件下可表示为:
(6)
设xn、yn为第n对水翼中心距船体重心的距离在x和y方向的分量,zn为第n对水翼的浸深(取正值)。当一对水翼一起考虑时,yn= 0。第n对水翼中心上方的波面方程为:
(7)
式中:ζa为波幅。
在规则波条件下,船舶j自由度的运动响应可表示为:
(8)
式中:ηj0为j自由度运动响应的复幅值。
当二维平板翼随船体在波浪中作垂荡和纵摇运动时,其水翼产生的力和力矩按Wu[3]方法进行了推导。扣除无升力体绕流作用力后,即可得到对称翼受攻角影响的升力/力矩。假设水翼与船体刚性连接,水翼的垂荡运动与船体垂荡、纵摇运动及水翼安装位置有关,水翼与船体拥有相同的纵摇角。设每对水翼具有相同的弦长和总展长,弦长为c,将一对安装于左右舷的水翼作为一个水翼整体进行考虑,即单个水翼展长b/2,总展长为b。经推导并将二维翼结果推广至三维矩形翼,在迎浪和随浪深水规则波中作垂荡和纵摇运动时,水翼产生的垂向环量力F3n(t)可表示为:
(9)
式中:
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
式中:" " " " " ";β为流体密度;" " " " " " 为考虑遭遇频率下的斯特罗尔数;展弦比" " " " " " ;" " " " " " " " " " " 为有限展弦比下的升力系数;F(σ)和G(σ)分别为Theodorsen函数的实部与虚部;Ji(k)为i阶第一类贝塞尔函数。式(16)中符号“+”为随浪海况,“-”为迎浪。 式(17)中符号“-”为随浪海况,“+”为迎浪。
纵摇方向的环量力矩可表示为
(18)
其中
(19)
(20)
(21)
(22)
(23)
(24)
式(19)中符号“-”表示随浪,“+”为迎浪。
3" " 水翼辅助推进船舶运动响应分析
3.1" "计算模型
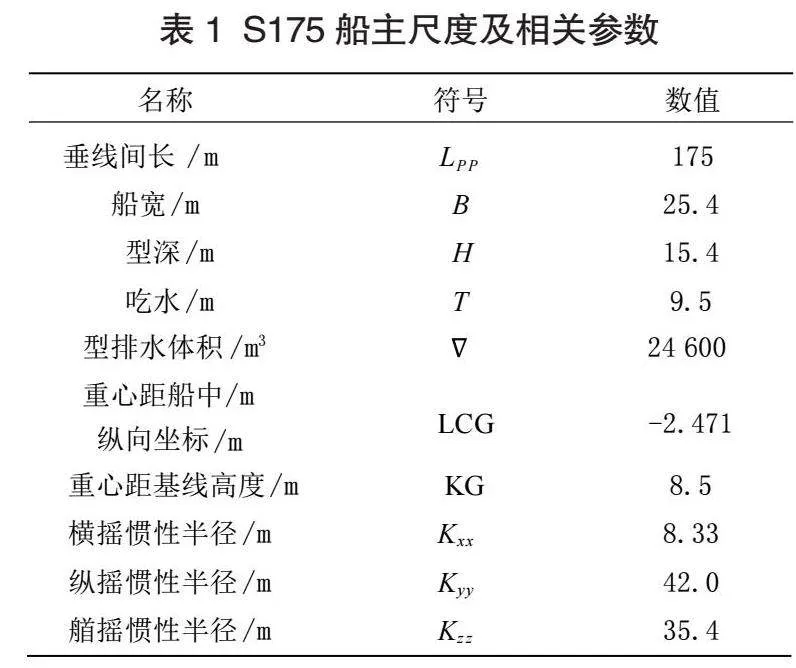
S175型集装箱船的船体几何模型的型线数据来自Watanabe等人[7]公开发表的论文,设计航速傅氏数Fr为0.275,计算模型的主尺度及各项主要参数如表1所示。为比较安装水翼对S175船运动响应带来的影响,在艏艉部距重心距离相等处各安装一对固定翼,水翼翼型为NACA0012。图2展示了安装水翼前后的模型示意图,水翼参数及安装尺寸如表2所示。
3.2" "计算流程介绍
先通过基于无升力体三维势流理论的Aqwa-Line求解器对含固定翼之船体进行水动力分析,得出与频率相关的波浪扰动力、附加质量与阻尼系数。输出波向、波浪频率、水深、流体密度、重力加速度、重心坐标、浮心坐标、排水体积、质量矩阵、静水刚度矩阵、航速、遭遇频率、遭遇频率对应的附加质量矩阵和辐射阻尼矩阵、线性粘性阻尼矩阵以及波频对应的波浪扰动力矩阵,例如定义该文件名为Analysis.AH1。
编写求解方程(4)的频域分析计算程序,其中摇荡翼在波浪中产生的速度环量力按公式(9)~(24)计算。将Aqwa-Line输出的Analysis.AH1作为频域分析程序中的输入文件,与水翼相关的参数为第二个输入文件。由于Analysis.AH1只输入波频对应的波浪扰动力,因此对于航行船舶而言,还需要补充输入零航速对应的波浪绕射力作为第三个输入文件,以便对波浪力进行航速修正。求解方程(4)得到并输出安装了固定翼的船舶在迎浪或随浪规则波中的运动响应。
3.3" "结果分析
为了比较安装水翼前后船体运动响应的变化,引入与第15届ITTC会议[8]相同的无量纲化方式,无量纲的频率,船体垂荡和纵摇运动幅值表示为:
(25)
(26)
(27)
式中:|η30|和|η50|分别表示垂荡和纵摇运动幅值。
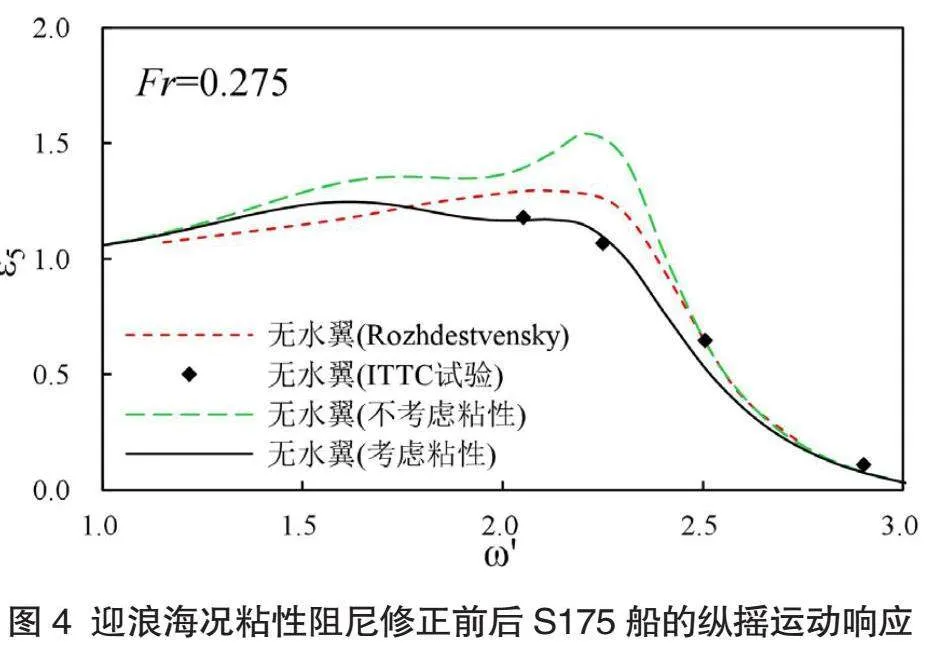
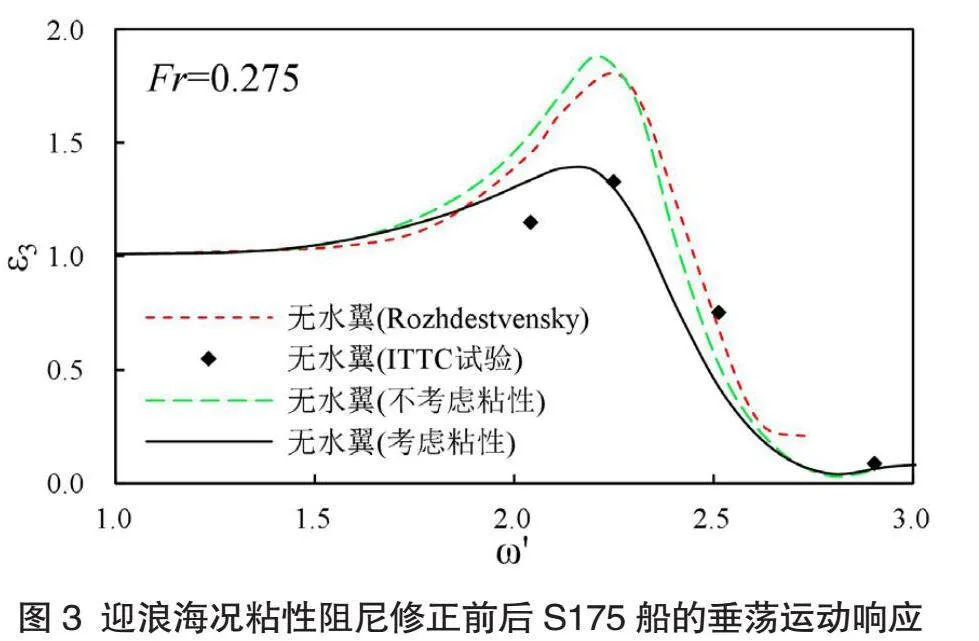
图3与图4给出了设计航速下未安装水翼时船体垂荡与纵摇粘性阻尼修正对数值模拟计算结果的影响,用于验证结果准确性的模型试验数据来源于第15届ITTC会议报告[8],基于切片理论的参考数值模拟结果来源于Rozhdestvensky等人[9]发表的论文。可以看到对船体进行纵摇与垂荡方向的粘性阻尼修正后,数值模拟结果更加趋近于模型试验结果,证明了粘性阻尼修正的必要性。
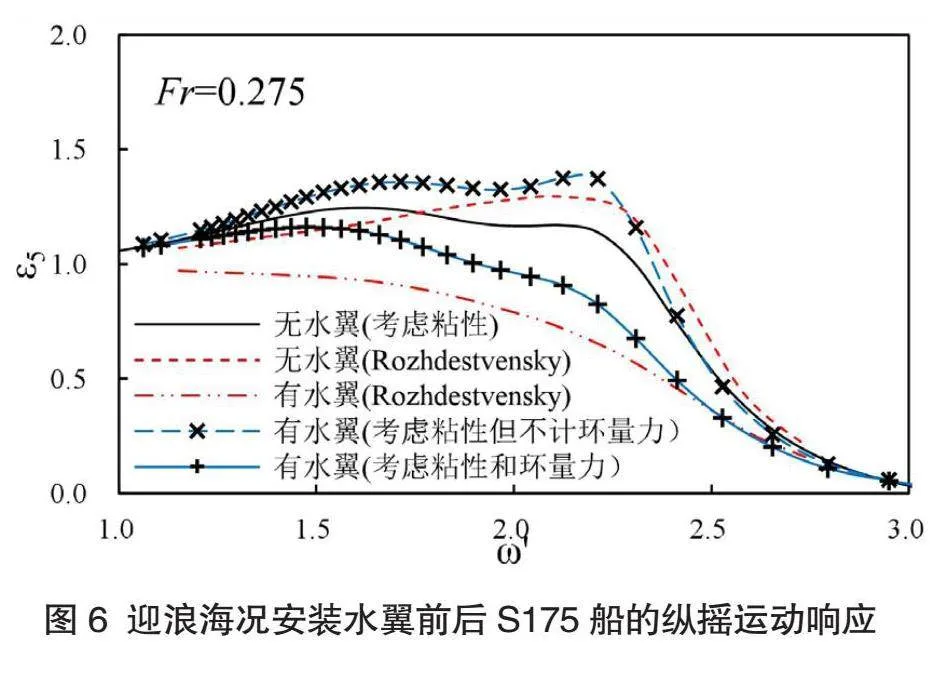
首先考虑迎浪工况,通过数值模拟得到S175船设计航速下在不同波浪频率条件下船体的垂荡和纵摇幅值结果如图5与图6所示,由图可知,在船体艏艉部安装了固定式水翼后,在迎接浪规则波中船舶的垂荡和纵摇运动幅值得到了显著的下降。当波浪的遭遇频率接近于船体运动的固有频率时,安装水翼后船体运动响应的下降愈发显著,在垂荡运动响应峰值的波浪频率附近,安装水翼后的船舶垂荡运动幅值降低了17.42%,纵摇运动幅值降低了22.41%,随着波浪的遭遇频率远离船体的固有频率,水翼对船体运动造成的影响逐渐减小。计算结果表明水翼改善了船舶在迎浪中航行的运动情况,提升了船舶的适航性与耐波性。
图5与图6中同时也展示了在未考虑由水翼产生的环量力与力矩的情况下船体的运动响应情况,可以看到不考虑速度环量力影响时,在计算的波浪频率范围内安装有水翼的船体垂荡和纵摇频率响应函数均较未安装水翼时偏大,即不考虑速度环量力情况下对安装有水翼的船舶的数值模拟产生了偏大的仿真结果。这一结果证明了水翼绕流所产生的环量力与力矩在水翼对船体作用中占到了在数值模拟时不可忽略的重要部分。
对于随浪工况,S175船体的垂荡和纵摇频率响应函数如图7与图8所示。用于比较的基于切片理论的参考数值模拟结果来自于第15届ITTC会议报告。在随浪工况下,由于波浪的遭遇频率远离船体的固有频率,因此在选取的计算频率范围内,未安装水翼时船体的运动响应幅值要远小于迎浪工况。在安装固定式水翼后,船体运动响应相对于安装水翼前的变化并不显著。计算结果表明随浪工况下固定翼所起的作用并不明显。
4" " 结论
本文基于三维势流理论与摇荡翼速度环量力理论解分析了水翼对S175船在规则迎浪和随浪中航行时的运动响应影响,可以得出以下结论:
1) 迎浪工况下在船体艏艉部安装水平固定翼能显著地降低船舶在波浪中航行时的垂荡和纵摇运动幅值。当遭遇频率接近于船舶固有频率时,水翼能起到最佳的减摇效果。在随浪工况下,水翼对船体运动的影响并不显著;
2) 摇荡翼所产生的速度环量力与力矩对迎浪海况中航行的船体运动影响较大,而在随浪工况下的影响较小。
参考文献
[1] ISSHIKIH. A Theory of Wave Devouring Propulsion (1st Report)[J]. 日本造船
学会论文集, 1982, 1982(151): 54-64.
[2] WAVEFOIL. Wavefoil - Retractable bow foils[EB/OL]. 2019[2024-01-11].
https://wavefoil.com/teistin/.
[3] WU Th Y tsu. Extraction of Flow Energy by a Wing Oscillating in Waves[J].
Journal of Ship Research, 1972, 16(01): 66-78.
[4] ISSHIKI H. A Theory of Wave Devouring Propulsion (2nd Report)[J]. 日本造
船学会論文集, 1982, 1982(152): 89-100.
[5]林丰,王冬姣.振动翼推进器在波浪中的水动力性能分析[J]. 广东造
船. 2016, 35 (04).
[6] WANG D, LIU K, HUO P, et al. Motions of an unmanned catamaran ship with
fixed tandem hydrofoils in regular head waves[J]. Journal of Marine Science and
Technology, 2019, 24(3): 705-719.
[7]WATANABE I, UENO M, SAWADA H. Effects of bow flare shape to the wave
loads of a container ship[J]. Journal of the Society of Naval Architects of Japan,
1989, 1989(166): 259-266.
[8]ITTC. Report of Seakeeping Committee[C]//Proceedings of the 15th ITTC. 1978.
[9]ROZHDESTVENSKY K V, HTET Z M. A Mathematical Model of a Ship with
Wings Propelled by Waves[J]. Journal of Marine Science and Application, 2021,
20(4): 595-620.
