兼顾有人/无人模式的eVTOL驾驶舱设计研究
2024-01-01 00:00:00席金鉴张莹莹
无人机 2024年5期
随着世界人口和人均汽车保有量的增加,中大型城市地面交通情况持续紧张。传统的修建地下隧道/高架桥等方式由于边际效应递减难以有效解决交通拥堵问题,因此迫切需要开辟空中交通路线。近年来各国积极推进城市空中交通(UAM)概念落地,大力发展“低空经济”战略性新兴产业,相关利好政策也在不断推出。在城市空中交通领域,eVTOL(电动垂直起降飞行器)具有广泛的应用前景。
自2010年,美国及欧洲等国着手探索eVTOL,并逐渐衍生出了多旋翼、复合翼和倾转旋翼等多样化平台构型。近年来,新能源产业飞速发展,“三电”(电池、电机和电控)技术不断取得突破,电动垂直起降飞行器逐渐具备军用/商用价值。在巨大的市场红利驱使下,老牌航空企业、新兴航空公司、汽车公司纷纷布局eVTOL研发,并逐渐涌现出以美国Joby、Archer,德国Volocopter等公司为代表的独角兽企业。其中,倾转旋翼eVTOL具有高速、舒适、大航程的特点,在交通运输方面具有显著优势,Joby、Archer、沃飞航空等公司推出了一批有代表意义的倾转旋翼eVTOL全尺寸验证机,客观上反映了eVTOL的发展方向。
倾转旋翼eVTOL基本情况及试飞进展
2020年7月,Joby公司研制的第一架全尺寸预生产原型机JAS4-2开始进行飞行测试,相继完成垂直飞行、过渡飞行、巡航飞行,以及最大飞行速度的验证。Joby公司试飞员用第一架2.0预生产原型机上进行了悬停检查飞行,但所有的过渡飞行都是由地面控制站远程驾驶的,驾驶舱没有试飞员。随着技术成熟度与飞行员操作能力的提升,越来越多的飞行员开始深入参与飞行测试活动。
2022年11月,美国Archer公司研制的双座Maker验证机以地面站远程控制方式,成功完成了首次向全翼飞行的过渡,后续进行了一系列的飞行测试,为Midnight四座eVTOL空中出租车项目取证提供技术验证。
在倾转旋翼eVTOL研制过程中,以无人模式开始验证飞行是一种常见的方法。基于降低风险、逐步提升的思路,第一步通过无人驾驶试飞验证,提升技术成熟度、飞行员操作能力;第二步开展有人驾驶飞行,在完成飞行员培训、确定的相关飞行包线基础上进一步进行试飞。
因此,倾转旋翼eVTOL往往需要具备有人和无人双模控制能力,对驾驶舱设计提出了新的要求。
驾驶舱人机工效设计因素分析
倾转旋翼eVTOL以直升机模式垂直起降、以固定翼模式航线飞行。直升机/固定翼模式标准规范对驾驶员人体尺寸、驾驶舱布局、内外视野、操纵装置等方面存在不同的要求,尤其是外部视野、仪表显示、操纵控制等方面。倾转旋翼eVTOL驾驶舱在符合直升机/固定翼模式标准、规范的前提下,还应满足无人驾驶相关的要求。
外部视野
外部视野是指有人模式下驾驶员能够看到的驾驶舱外部区域,对驾驶员获取外部环境信息、安全飞行具有非常重要的作用。无人模式对驾驶舱外部视野没有明确要求。
外部视野是倾转旋翼eVTOL驾驶舱设计过程中的重要一环。以倾转旋翼eVTOL使用需求为牵引,结合国内外相关研制经验,分析驾驶员在不同飞行阶段(垂直起降、过渡飞行、巡航飞行、转换飞行等)对外部视野需求,综合考虑不同模式对应的适航规章、国标等设计要求,通过组合、裁剪等方式建立适用于倾转旋翼eVTOL驾驶舱外部视野要求,开展驾驶舱外部视野设计。
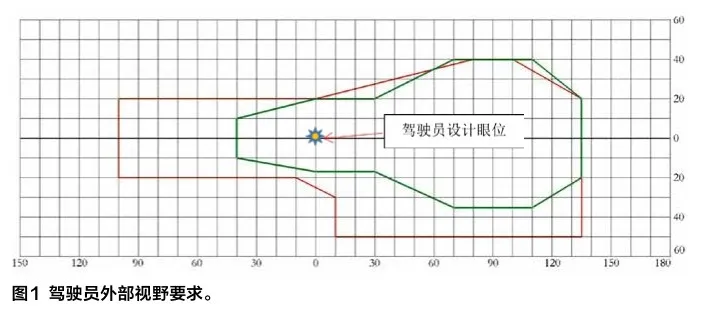
对于常见的并列双驾驶构型驾驶舱,根据AC 29.773等适航规章的要求,驾驶员(以右驾驶员为例)从设计眼位可得到不受妨碍的最小视角直线图见下图,红色区域为直升机模式外视野要求,绿色区域为固定翼模式外视野要求。通过对比分析,直升机模式对前方/下方外部视野有更高的需求,倾转旋翼eVTOL驾驶舱设计应兼顾两种模式对外部视野的要求。
仪表显示
倾转旋翼eVTOL相对于传统飞行器构型复杂,飞行时需要驾驶员监控的参数较多。传统飞行器仪表显示参数主要有:
(1)运动类信息,飞行器高度、高度变化率、速度、过载;俯仰角、横滚角、航向角;攻角、侧滑角等;
(2)状态类信息:飞行器各系统所处的工作状态和工作模式;
(3)导航类信息,导航方式、经纬度、飞行计划、飞行航路、航路点;
(4)告警类、应急处理类信息,故障告警及故障级别,参数告警(极限速度、极限过载、剩余油量等)、状态告警(火警、空速管结冰等);
(5)健康类信息,飞机各系统健康状况;
(6)地理环境类信息,温度、结冰程度、风速、风向、数字地图等。
在满足以上仪表显示参数的情况下,有人模式下倾转旋翼eVTOL驾驶舱还需要显示飞行模式、倾转角度、倾转同步度、过渡走廊、各旋翼转速等特有的参数。无人模式下,地面站还需要显示链路状态、任务规划等参数。
操纵控制
倾转旋翼eVTOL相对于传统飞行器操纵复杂,对于驾驶员操纵控制能力提出了很高的要求。以一种典型操作程序为例,首先以直升机模式垂直起飞,达到一定飞行高度、速度后开始操作倾转机构,向固定翼模式过渡,期间需要密切关注飞行参数,然后操控升力旋翼停转,以固定翼模式巡航飞行;返航时,先要减速,然后操控升力旋翼增加转速至100%,达到一定高度、速度后开始操作倾转机构,向直升机模式转换。紧急情况下,机组还需要根据所处的飞行模式采取不同的处置程序。
有人模式下,倾转旋翼eVTOL驾驶舱应采用统一控制概念,使用一套操纵系统实现倾转旋翼eVTOL所有飞行阶段的操纵控制,降低驾驶员认知负荷,提升飞行效率。
考虑无人模式操控需求,倾转旋翼eVTOL驾驶舱还需设置有人/无人模式转换开关,用于切换有人/无人模式;根据无人模式飞行过程中控制设备使用需求,将驾驶舱中起落架、灭火、燃油、液压、发动机等系统开关统一采用双模控制设计,既能通过物理开关操纵,也具备远程操控能力。
总结与展望
现阶段倾转旋翼eVTOL存在着显示信息繁杂、操纵控制复杂、驾驶员认知负荷高等问题,安全性水平还有待进一步提高。随着倾转旋翼eVTOL的研究日渐成熟、试飞工作不断取得进展、性能不断完善,几款代表机型也将取证并交付使用,使用范围和任务性质将进一步扩展,以更高效、更实用、更安全的飞行扩大空中出行市场。

未来人工智能算法改进以及计算能力的提升,推动智能人机交互、辅助决策、自主控制等智能化技术在驾驶舱人机系统中的应用,可以进一步降低驾驶员工作负荷,将驾驶员工作重心集中在状态监控、综合决策方面,有效提升倾转旋翼eVTOL人机工效与安全性水平。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
电子制作(2019年7期)2019-04-25 13:18:24
时代英语·高一(2018年4期)2018-09-14 10:53:14
航空模型(2016年10期)2017-05-09 06:25:59
百科探秘·航空航天(2016年9期)2016-12-01 03:04:15
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
时代英语·高一(2016年4期)2016-09-21 14:45:56