无人机空基回收技术研究
2024-01-01 00:00:00魏晓恒马铁林王祥胜王致远
无人机 2024年4期
蜂群无人机是指能够在有人操控或自主协同下开展侦察、干扰和攻击的无人机集群,其可以通过内部网络交换信息,并根据战场实际情况自主或接受外部指令确定作战行动。执行的作战任务主要包括压制/摧毁敌防空系统、超视距作战、协同侦察与打击、栖息和凝视作战、传感器空中投放、反无人系统、机载分层网络构建、武器系统作战支持以及持续信息优势作战等。
蜂群无人机一般采用空基集群发射和回收的方式,由运输机、战斗机或轰炸机,将蜂群无人机带到任务区域上,然后进行空中集群投放,利用无人机集群作战优势,对目标区域进行侦察、干扰或打击,任务结束后母机(一般由改装后的运输机担当)对蜂群无人机进行快速而又精准的空基集群回收。无人机空基回收技术可以有效解决中小型无人机航程有限的固有劣势,使其可以执行较远距离的任务,发挥蜂群无人机的战术优势。所以,无人机的空基回收技术是无人机集群作战实用化的关键瓶颈技术。
空基回收发展历程
空基回收的发展经历了三个阶段:第一阶段有人机空基回收,利用飞艇或者大型运输机轰炸机为母机,对有人机进行空中回收;第二阶段单架无人机空基回收;第三阶段无人机集群空基回收。

有人机空基回收阶段
为了给飞艇或者轰炸机护航,解决战斗机由于航程短,无法执行远程护航任务的问题,早在一战时期就开发出了飞艇或者轰战机作为母机,小型战斗机作为子机的子母机组合,典型代表有美国在冷战时期为了给远程轰炸机护航而研发的可挂载在B-29和B-36轰炸机上的XF-85“哥布林”战斗机。战斗机是由母机机腹下的伸缩机构实现投放和回收,战斗机的座舱前方安装了一个可伸缩的钩子用于回收。回收过程中,战斗机从母机后下方接近,通过伸缩钩勾住从母机机腹伸出的吊杆,随后飞机被拉入母机机腹内。
单架无人机空基回收阶段
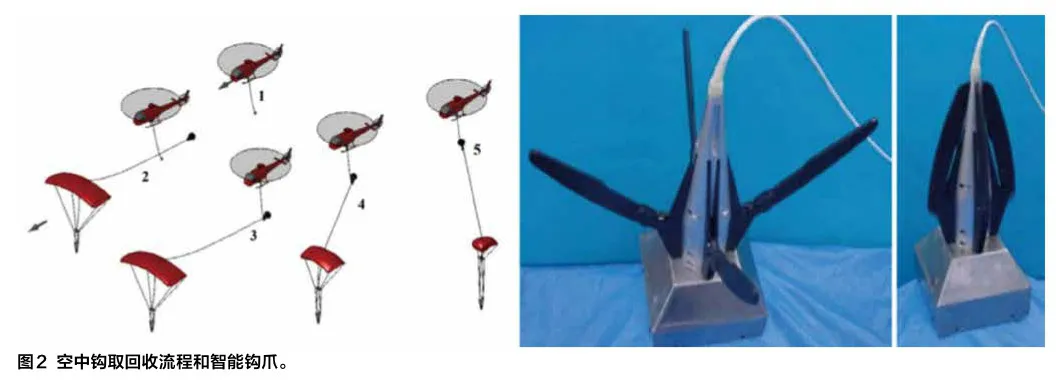
在20世纪60年代,为了实现卫星、航天器返回舱和无人机快速、精确、可靠性的空中回收,发展了空中钩取伞回收技术。空中钩取伞回收技术的发展经历了三个时期,最早的空中钩取伞回收一般由回收机、绞盘、钩挂装置、圆形降落伞系统组成,后来经历了滑翔翼伞、智能钩爪两次技术变革。由美国Vertigo公司和洛克希德·马丁公司联合研制了第三代的空基回收系统,其典型特征是采用智能钩爪(如图2所示),基本不需要对直升机进行专门改装。典型回收流程如下:(1)直升机低速靠近回收伞;(2)钩爪靠近引导伞伞绳;(3)钩爪感知到伞绳并自动闭合,完成钩挂工作;(4)直升机上升,收口装置工作,翼伞排气;(5)翼伞的收口排气完成,直升机拖带货物运输至目的地。

无人机集群空基回收阶段
随着蜂群无人机的出现和发展,无人机空基集群回收的需求变得十分迫切,典型的回收方式有撞网式回收、机械臂回收、稳定拖靶回收、机械臂+稳定拖靶回收。其中,机械臂+稳定拖靶回收方式已经实现空基回收(“小精灵”空基发射/回收无人机项目),其他方式大部分处于概念设计和仿真阶段。
现有无人机空基回收技术对比
蜂群无人机空基集群回收与普通的无人机空基回收相比,除了同样要面对空中紊流、母机流场和自身性能等影响因素,最关键的不同点在于蜂群无人机空基回收需要解决“大量”的无人机在短时间内快速回收的问题(中小型无人机在回收阶段剩余的航程航时有限)。因此,蜂群无人机空基回收还需要满足快速、精准、高效的要求。根据蜂群无人机作战对空基回收要求对以上回收方式进行了梳理、总结和分析对比(见表1)。
蜂群无人机空基回收关键技术

回收装置设计从上文中可以看出,每种回收方式都需要与其配套的回收装置,回收装置不但需要实现无人机的回收,还需要使回收区域尽量远离母机,在保证母机安全的同时,减小回收过程中母机流场的影响。回收装置还需要克服引导信息误差、大气紊流和回收碰撞时产生的过载等问题,最终实现快速、准确、高效、安全的回收无人机。目前典型的无人机空基回收装置可以分为以下几类:使用横杆/绳索的阻拦式回收;基于空中加油技术的稳定锥套式(稳定拖靶)回收;撞网式回收;使用气压或者电
磁的吸盘式回收。
回收过程航迹规划
无人机空基回收航迹规划需要考虑环境因素(各种威胁因素,禁飞因素,风场大气因素)和自身性能因素(末端精确引导方式,母机和无人机的最小转弯半径、俯仰角、飞行高度、飞行速度等)。在综合考虑以上影响因素的基础上建立合理的模型,使用最优规划算法,使得空间分布的蜂群无人机以最短的时间或最短的距离与母机汇合回收。
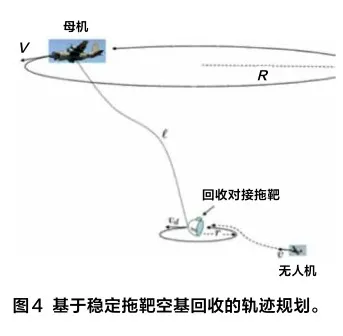
无人机空基回收航迹规划可分为汇合阶段和对接阶段,其中无人机与母机的对接阶段是一个关键难点,这是因为作为母机的运输机,比如C-130运输机最小平飞速度在270km/h左右,而旋桨式的小型无人机飞行速度最大约在170km/h左右。因此,当蜂群无人机是螺旋桨式无人机时,母机和无人机速度是无法匹配。目前可行的办法是Sun L , Beard R W , Colton M B等人提出了一种基于稳定拖靶式空基回收的轨迹规划方法,通过设置合适的缆绳长度,母机盘旋半径和飞行速度,使得回收对接拖靶在满足需要的盘旋半径和速度下稳定飞行,便于无人机在辅助引导系统的帮助下与其对接。
回收引导技术
无人机空基回收需要克服大气紊流、母机流场和母机无人机飞行性能的不利影响,需要高精度的引导技术进行数据辅助引导。典型的无人机引导技术主要有:雷达引导、激光引导、差分GPS引导和视觉跟踪引导等。在母机和无人机向指定空域汇合阶段,对测量数据的精度要求不高,只需要工作范围广的引导方式(如差分GPS引导)使无人机按照预定航迹到达回收空域。在进入对接阶段后,需要高精度的引导方式(如激光、雷达、视觉跟踪引导)引导无人机与回收装置对接。因此,无人机空基回收一般使用的是组合式引导技术,数据处理方面一般采用多路(如GPS+视觉跟踪两路数据)多源(无人机、母机多路数据)数据融合的方式。
无人机回收控制方法
无人机空基回收的控制方法需要在外界强干扰条件下实现母机与无人机的精确对接,因此需要控制方法具有良好的抗干扰能力、鲁棒性和闭环动态特性。由于无人机空基回收过程与无人机自主空中加油的汇合阶段、跟踪对接阶段高度相似,因此可以借鉴无人机空中加油的控制方法。国内关于无人机空中自主加油对接控制的研究也比较多,比如Jiang Wang等人的基于L1神经的新型自适应控制方法,李大伟等人的基于粒子群算法的PID整定方法和Campa等人的基于GPS、图像传感器融合处理信息的一种鲁棒控制器。
结束语
从文献资料可以看出,目前国内对蜂群无人机空基回收处在起步阶段,但回收装置的设计、回收航迹规划、回收引导技术和无人机回收控制方法等关键技术飞速发展。特别是无人机空基回收技术和无人机空中加油技术有很多相似性,可以相互借鉴,相信不久的将来我国也能够实现蜂群无人机空基回收。
猜你喜欢
中国设备工程(2023年21期)2023-12-12 17:03:41
发明与创新·大科技(2021年10期)2021-01-25 05:58:44
电子产品可靠性与环境试验(2020年2期)2020-12-14 12:14:35
青年歌声(2019年12期)2019-12-17 06:32:32
制造技术与机床(2018年11期)2018-11-23 01:07:24
制造技术与机床(2018年10期)2018-10-13 06:36:30
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
大陆桥视野·下(2017年5期)2017-06-19 01:20:38
北京航空航天大学学报(2016年7期)2016-11-16 01:50:54
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52