水果采摘机械臂末端执行器设计
2023-12-28 00:31靳惠婷徐卫平
贵州农机化 2023年4期
梁 勇,靳惠婷,梁 晟,徐卫平
(1.贵州电子科技职业学院,贵州 贵阳 550025;2.贵州师范大学,贵州 贵阳 550025;3.贵阳学院,贵州 贵阳 550005))
0 引言
贵州省山地种植水果面积较大,在农业生产中,果实的采摘因周期短,操作条件不便,是农业劳动中最为耗费人力资源的工作[1]。目前,水果采摘以人工为主,是山地农业水果种植中费力费时成本较大的环节。山地农业新鲜水果收获难以实现机械化作业,高效低损采摘又是农业机器人研发领域中的难题,导致目前山地农业机械自动化水果采摘应用极少。针对山地种植的水果采摘需求,改变当前人工采摘成本高、效率低下的问题。在研发山地水果采摘设备前,首先应确定采摘对象和工作场景,考虑山地水果的生长形态、重量、生长环境和周边地形环境,并作详细的现场调研,明确山地水果采摘的设计要求。末端执行器作为采摘机器人的核心部件之一,安装于机械手臂前端,是机器人接触果实的重要工作部件,其工作对象的大小和形状一般不相同,且具有柔软、易损坏等特性,因此采摘机器人末端执行器的设计非常重要[2]。
水果采摘机械臂末端执行器主要用于机械臂末端进行目标水果抓取、搬运和摆放。机械臂末端执行器可以代替传统的人工采摘方式,提高采摘效率和质量,减少采摘过程中的损伤。机械臂末端执行器还可以自动适应不同种类和形状的水果,具有智能化和自适应性。无损果实采摘是采摘机械臂的关键,主要依靠采摘机械臂末端执行器来实现。不同的水果,其外形和软硬程度不同,采摘要求不尽相同,采摘方式也不同,因此对于水果末端执行器的结构和控制要求也存在差异。猕猴桃果实形状多为较规则的椭圆形,易于实现机械手的夹持[1]。
中国凉都六盘水是红心猕猴桃的发源地,该品种获 “农产品地理标志”认证,被国家质检总局批准为 “国家地理标志保护产品”,有“神奇美味果,红色软黄金”的美誉,曾获得“中国2008年北京奥运会推荐果品”“中国2010年上海世博会指定果品”,第十五届、第十八届“中国绿色食品博览会金奖”等[3]。
基于贵州六盘水的红心猕猴桃较之其他品种质量更优,皮薄多汁,采摘抓取需要轻抓轻放的特点,设计一套采摘红心猕猴桃专用,并且集成视觉识别判断的末端执行器,研制其机械装置、感知系统和控制系统,并多次进行采摘试验,为后期进入山地实际进行采摘试验奠定基础。
1 红心猕猴桃物理特性
1.1 试验条件
为使设计的末端执行器能正确采摘猕猴桃,设计之前需对猕猴桃的相关物理特性进行测定[1]。贵州六盘水红心猕猴桃适宜的采摘期为花后125~135 d,一般在8月至9月。红心猕猴桃一株果树上的果实成熟度不同,需要分批采摘,人工采摘成本较高。物理特性测试试验用的红心猕猴桃为同一批次,来自贵州六盘水红心猕猴桃园,且品质和成熟度基本相似,具备上市条件的猕猴桃。
1.2 抗压特性试验
红心猕猴桃抗压特性试验在贵州师范大学现代农业实验室进行,由机械臂末端执行器配套台达ASDA-A2系列200 W伺服驱动和ECMA系列伺服电机(200 W,额定扭矩0.64 N·m,额定电流1.55 A,额定转速3 000 r/min),由S7-200 SMART PLC ST40控制末端执行器,实现红心猕猴桃抗压特性试验数据采集。
随机选取5只红心猕猴桃样本,将红心猕猴桃夹在试验机的卡爪上,负载电流设定范围为0~1.55 A,卡爪开合速度设定0~15 mm/min。为避免变形初始阶段由于卡爪与猕猴桃果实表皮接触不稳定时造成的误差,试验数据采集记录从压缩量0. 3 mm开始。猕猴桃所承受伺服电机负载电流I与猕猴桃表面压缩量D之间的抓取压力特性曲线如图 1 所示。
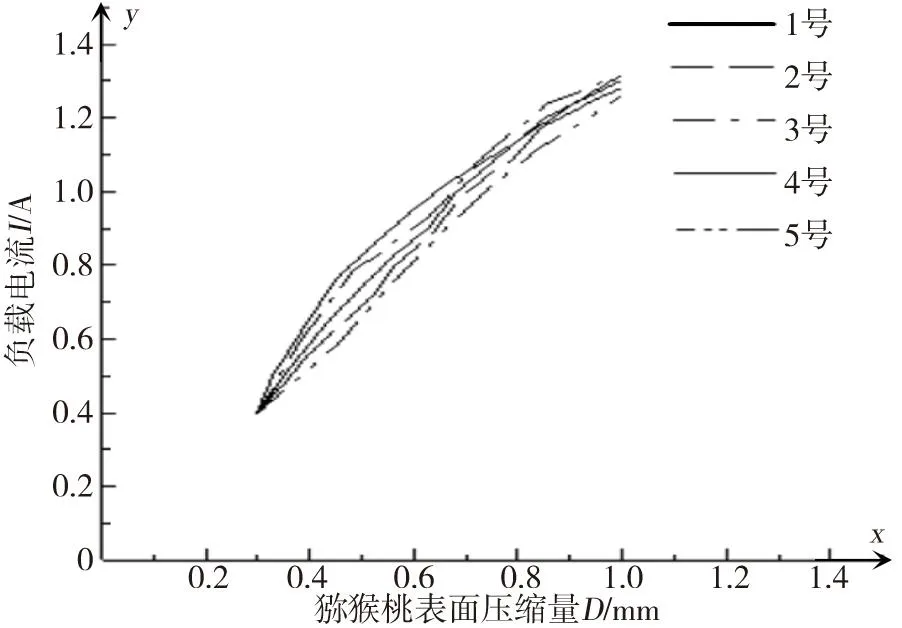
图1 红心猕猴桃抓取压力特性曲线
由图 1 可以看出,在伺服电机1.3 A负载电流作用下,测试曲线均未出现明显转折屈服点,猕猴桃所承受加压电流I与猕猴桃表面压缩量D之间的压力基本呈线性关系,由此证明采摘猕猴桃时,在1.3 A负载电流作用下,猕猴桃外形变化在其弹性范围内。负载加压作用结束后,观察红心猕猴桃表面无压痕。将实验猕猴桃放置15 d,与同一批采摘、未做过负载加压抓取试验的猕猴桃对比,没有发现猕猴桃表面破损或果皮颜色变化,且切开后对比,也没有发现差异,实验人员对比品尝后,口感味道无差别。因此可认为: 台达ECMA伺服电机(200 W)伺服电机保持1.3 A负载电流可以完成机械采摘红心猕猴桃任务。
2 机械臂末端执行器的基本结构
针对贵州猕猴桃机械收获作业要求,根据实际采摘环境,设计符合采摘要求的机械臂尺寸,对机械臂进行拓扑优化,降低机械臂质量[4]。通过对猕猴桃一体化机械作业技术和一体化机械执行机构中的关键技术进行研究,设计出水果采摘机械臂末端执行器,如图2所示。机械臂末端执行器主要由抓取装置、传动系统和控制系统组成。
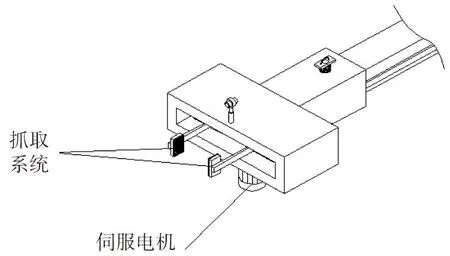
图2 机械臂末端执行器
2.1 抓取装置
抓取对象的形态结构特征对于末端执行器的机械结构设计很重要[5]。根据抓取对象设计的抓取装置是机械臂末端执行器的主要部分,用于完成水果的抓握、采摘和搬运。抓取装置的设计需要考虑水果的大小、形状和重量等因素,以保证机械爪能够正确地抓取水果并将其搬运到指定位置。
针对贵州山地农业特色水果红心猕猴桃设计了一套抓取装置,包含主杆和台达伺服电机,伺服电机的输出带动螺纹杆,螺纹杆的外侧螺纹连接有滑板,滑板的左侧铰接有2个连接杆,主杆的左侧铰接有2个卡爪,该卡爪可以根据水果采摘的对象不同,进行模块化替换。利用3D打印技术制作样机,并进行组装[6]。主杆的外侧开设有通孔,卡爪的外侧设置有气动推杆,气动推杆的输出端设计有夹板。该山地智慧农业抓取装置,通过台达伺服电机带动螺纹杆传动,螺纹杆驱动滑板运行,从而带动连接杆,联动卡爪进行张开。由于采用台达绝对值编码器伺服电机进行控制,通过伺服系统能够快速准确读取抓取猕猴桃时卡爪坐标位置和负载电流。
2.2 传动系统
传动系统是机械臂末端执行器的重要组成部分,用于控制机械爪的运动。传动系统一般包括伺服电机、减速装置、传动轴等部分,其结构如图3所示。伺服电机负责提供动力和精确定位,减速器负责将电机提供的高速转动转换为低速大扭矩的输出,传动轴负责将输出传输到机械爪上,传感器负责监测机械臂末端执行器的运动状态,以便及时调整控制参数。
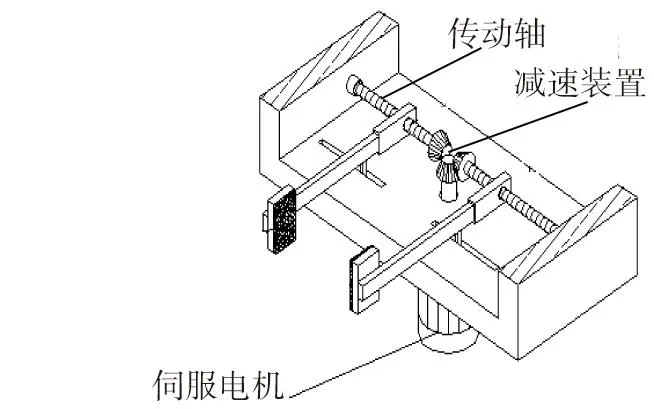
图3 末端执行器传动系统
3 机械臂末端执行器的控制系统
机械臂末端执行器的控制算法需要根据机械爪和水果的特点进行设计,控制系统是机械臂末端执行器的核心部分,用于控制机械臂末端执行器的运动。控制系统采用PLC实现控制与上位计算机通信。控制系统根据机械爪的设计和水果的特点,设计合适的控制算法,以保证机械爪能够正确采摘水果并将其搬运到指定位置。
整个机械臂末端执行器电气控制系统设计由西门子S7 200 SMART PLC脉冲控制带有绝对值编码器的台达A2伺服系统,上位控制由昆仑通态触摸屏组态实现。
机械臂末端执行器的控制系统如图4所示,其采用闭环控制方式,根据抓取猕猴桃时输出变化的信息来进行调整,通过对比得出输出值与期望值之间的偏差,系统自动调节以消除偏差,获得预期的机械臂末端执行器抓取猕猴桃稳定性能。在机械臂末端执行器抓取反馈控制中,存在着指令输入到伺服电机执行输出的信号通路,同时从伺服电机输出端反馈负载电流和夹取坐标位置的反馈通路,构成机械臂末端执行器采摘闭环控制系统。本控制系统中,以台达ECMA伺服电机反馈抓取红心猕猴桃的负载电流和卡爪位置,完成机械臂末端执行器精确抓取红心猕猴桃控制。

图4 机械臂末端执行器闭环控制框图
机械臂末端执行器采摘控制系统的设计以传统连续的PID控制原理为基础,设计夹取猕猴桃的闭环控制关系式为
M(t)为机械臂末端执行器控制系统输出控制值;M为输出的初始值;e(t)为误差信号;K为比例增益;TI为积分时间常数;TD为微分时间常数。
台达ECMA伺服电机是机械臂末端执行器闭环PID控制的重要组成部分。首先采用比例控制,伺服电机向夹紧方向运动,位置和夹紧电流控制量与误差成正比,当距离猕猴桃位置较远时,伺服电机运动速度较快,当卡爪接触猕猴桃后,由于接触物体伺服电机负载电流会增加,当达到设定物体电流0.3 A后,系统认为卡爪已经夹住猕猴桃,此时机械臂末端执行器继续按照目标夹紧电流1.3 A持续加压,控制系统进入积分调节,系统累积误差并直接加到控制量上,使伺服电机夹紧电流增加,夹紧猕猴桃压力加大,最终消除稳态误差,达到夹紧电流1.3 A,当有外界干扰造成偏离时,微分调节产生作用,调整伺服电机,减少偏离值,让机械臂末端执行器保持夹紧电流1.3 A,完成机械臂末端执行器夹紧猕猴桃的任务。
试验中,系统实时监测控制机械臂末端执行器的运动状态,调整机械臂末端执行器的卡爪位置、速度、负载电流等数据,并将数据反馈到控制系统中,通过不断测试调整比例增益、积分和微分参数,使机械臂末端执行器达到抓取红心猕猴桃的稳定状态。
在实验室中,设计由昆仑通态触摸屏(型号:MCGS TPC7062Ti)、西门子S7 200 SMART PLC ST40和台达A2伺服系统完成实验控制。选取20只红心猕猴桃,伺服电机夹紧电流控制在1.3 A,进行试夹持实验,成功率100%,完成一次机械臂末端执行器抓取猕猴桃动作用时8 s。实际检查实验后的猕猴桃,猕猴桃表面无损伤,口感无差别。
4 结语
以采摘红心猕猴桃为目标,设计了一套水果采摘机械臂末端执行器。 对红心猕猴桃抗压特性进行实际测试。通过末端执行器在红心猕猴桃上夹取的方法,实际测出红心猕猴桃抗压特性较好,末端执行器配套台达ECMA伺服电机(200 W)伺服电机保持1.3 A负载电流可以完成机械采摘红心猕猴桃任务。
在实验室进行了模拟红心猕猴桃采摘试验,预先设定保持1.3 A负载电流可完全可靠夹持住红心猕猴桃。实验中,猕猴桃夹持成功率为100% ,完成一次机械臂末端执行器抓取猕猴桃动作用时8 s。
猜你喜欢
发明与创新(2021年39期)2021-11-05
智能制造(2021年4期)2021-11-04
金桥(2020年9期)2020-10-27
中国教育信息化(2018年22期)2018-11-28
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
学与玩(2017年12期)2017-02-16
——“绿筑迹 ——台达绿色建筑展”台达记者会
制造技术与机床(2016年7期)2016-08-31
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16