基于TRIZ理论解决轨道式矿用巡检机器人应用场景受限的问题
2023-12-27 16:53张琦张伟王珏珺刘树义
科技创新与品牌 2023年10期
张琦 张伟 王珏珺 刘树义
摘 要:使用多种TRIZ理论将“轨道式矿用巡检机器人”创新为“转向履带式双目视觉矿用巡检机器人(机械臂款)”,该机器人可自动识别视觉对象,分析视觉对象位姿信息及机械臂执行端位姿信息,可手眼协调操作矿山相关机械,有效降低人工成本,提高矿山作业巡检、管理、日常操作和临危操作的智能化和无人化水平。
关键词:TRIZ;转向履带;双目视觉巡检机器人
一、背景及意义
矿山行业拥有其他行业少见的安全风险,针对皮带运输、井下巷道、变电站、生产车间等位置的巡检需求,我们自主研发了轨道式智能巡检机器人,解决了该岗位人员巡岗距离长、难度大、人员紧缺的矛盾,基本实现了岗位无人化、智能化。该系统实现了有效的智能巡检,但是轨道限制了系统的应用场景,同时单目摄像机不能满足获取目标深度信息的需求,对于矿山行业大型机械开关控制操作、急停按钮操作、矿山变电站高低压开关柜按钮操作等人工操作不能进行无人化替代。
二、初始问题形势分析
2.1 当前系统功能组成及工作原理
轨道式矿用巡检机器人可以替代人工实现巡检,该设备依靠摄像机和多种传感器,在单轨道上往复运行或在环形轨道上连续运行,对生产环境、设备、工艺情况、生产安全情况及异常进行观察和判断。系统由轨道、运动控制模块、智能算法模块、通信模块、射频模块、动力模块、云台、摄像头、软件平台组成。
智能巡检机器人通过运动控制模块实现在轨道上匀速行驶,通过动力模块及充电系统实现无线充电电量供给,通过射频模块和RFID标签实现行驶位置定位与校正,通过双光谱热成像摄像机结合云台实现温度、故障及危险识别,通过通信模块结合无线终端实现上位机与机器人之间的通信,通过自主研发的软件平台实现图像监测及分析。
2.2 系统存在的问题
问题1:轨道式智能巡检机器人有轨道限制,需要在应用场景上空安装轨道,虽设备拥有强大的巡检功能,但适用范围受限。
问题2:单目摄像头无法获取目标的深度信息,不能确定目标与机器人的相对位置。
问题3:只能进行巡检而没有相应的无人化操作,不能代替人执行一些工作。
三、转向履带式双目视觉矿用巡检机器人设计
3.1 功能分析
技术系统组件包括:轨道、运动控制模块、智能算法模块、通信模块、射频模块、动力模块、云台、摄像头、软件平台。超系统组件包括:无线终端、RFID标签、充电系统。系统作用对象包括:被視觉识别的对象,可包括皮带、泵、井下巷道中的设备或线路、变电站中的高低压开关柜、生产车间中的设备等,以下简称视觉对象。根据相互作用分析表绘制结构模型如下: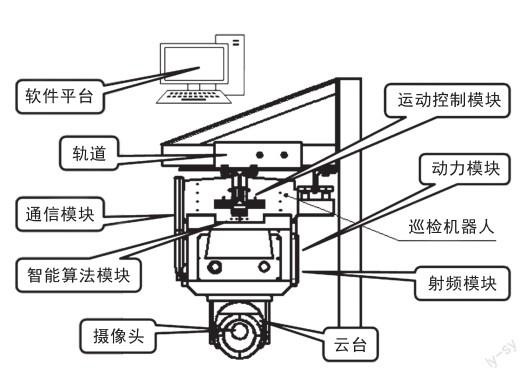

分析出主要功能是识别分析视觉对象。因此,搭建功能模型表,如下:
根据功能模型表,有害组件是轨道,功能不足组件是运动控制模块、摄像头和软件平台。
根据裁剪法实施的指导原则和功能分析表,轨道限制了机器人的使用场景和应用对象,所以系统中存在有害的组件是轨道,因此从轨道开始裁剪。从而分析出方案提示一:去除轨道,改变机器人的运动控制模块,由轨道式更改为万向轮式轮盘,360度行驶,使机器人灵活落地。
通过因果链分析选择解决的原因是可见光波段成像摄像头个数只有一个。分析出方案提示二:根据原因2.1.1.1.1,将单目摄像头换成双目摄像头,让机器具有人眼一样的视觉系统对视觉对象进行检测与识别。
通过最终理想解分析出方案提示三:给机器人增加多关节可点可抓的机械臂并在软件平台增加其位姿控制算法。
利用九屏幕法分析出方案提示四:在机械臂末端增加双目摄像头构成手眼系统,增大视野范围。
综上进行总体资源分析进一步推进创新产品的研制与应用。
四、研制与应用
运用TRIZ工具进行系统问题的解决并对创新技术方案进行梳理和评价。
技术矛盾:机器人需要用双目摄像头拍摄清晰的视觉对象,进行目标标定,同时计算深度信息,指导机械臂位姿控制,进而进行拟人化操作。
摄像头集成到机械臂执行器上,带来了当目标物体距离很近的情况下观察不到的问题(针对矛盾矩阵NO.24信息损耗)。将摄像头与机械臂分别摆放,补偿了信息损耗的问题,拉远摄像头的同时产生了摄像头像素增加及变焦能力增加的问题,增添了系统控制的复杂性(针对矛盾矩阵NO.37控制复杂性)。
可使用的工具有:NO.35性能转换法、NO.33同化法、NO.27替代法、NO.22变害为利法。
选择NO.35性能转换法,提出方案提示五:将摄像头基于位置的视觉控制系统性能增加,改变软件平台灵活性程度来应对系统控制复杂性。

基于位置的视觉控制系统可以单独计算目标物体的三维坐标和姿态,这样既简化了视觉伺服硬件设备,又能在控制机械臂位姿的过程中正常应用。如图所示,把对目标物体定位的位置信息当做系统给定,在系统中的反馈环节计算位置。
物理矛盾:攝像头与机械臂距离既要远又要近。
TC1:如果摄像头与机械臂执行器距离特别近,视野范围增大了,但是摄像头跟随机械臂运动(Eye-in-hand形式),摄像头拍摄到的理想图像特征会模糊。
TC2:如果摄像头与机械臂分开放置(Eye-to-hand形式),虽然理想图像特征清晰了,但是增加了软件平台控制算法的难度。
解决办法:条件分离
方案提示六:将双目摄像头架设位置成像中心与机械臂基座平转轴中心俯视重叠,与机械臂执行器初始位置中心后视重叠。
物场模型:在设计机器人从轨道落地的过程中,希望机器人在视觉对象周围能360度旋转行进,所以选择了万向轮运动盘,但是该运动盘也有运动限制。
问题:机器人在地面行驶中遇到楼梯和大颗粒障碍,行走不过去。
物-场分析(效应不足的完整模型)
S1:地面,S2:轮盘,F:机械场。选择S3替代S2。S3:转向履带轮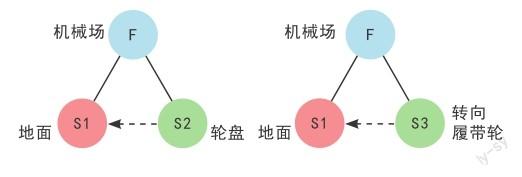
通过物场分析得出方案提示七:将机器人的轮子更换为转向履带轮,在矿山环境下可以爬楼梯、爬坡以及碾压大颗粒障碍行进。
对整体系统进行专利检索,相关内容仅有2条,所以转向履带式双目视觉矿用巡检机器人(机械臂款)处于性能参数快速提高,需求量、产量迅速增加阶段,对照S曲线为成长期。处于成长期,根据S曲线与进化法则之间的关系选用子系统不均衡进化法则。
用子系统不均衡进化法则对双目摄像头、转向履带、机械手臂和软件平台进行一体化优化设计得出全部技术方案:
转向履带式双目视觉矿用巡检机器人(机械臂款)是由双目摄像机、云台、多关节可点可抓的机械臂、运动控制模块(转向履带)、智能算法模块、通信模块、射频模块、动力模块、软件平台组成。双目摄像机是视觉定位系统中最重要的硬件,两个摄像头距离12cm,图片分辨率为1280×960,视场角66°,具有自动调焦功能,确保采集丰富的视觉信息。系统的执行机构机械臂,通过旋转关节和平动关节完成操作指令,控制处理器采用高性能、低成本的STM32系列,快速求解机械臂逆运动学参数。
PBVS通过摄像机采集图像进行三维重建得到目标物体的位姿信息和机械臂末端执行器的当前位姿,然后将目标位姿和当前位姿进行比较,最后根据两者误差来设计反馈控制率。
转向履带式双目视觉矿用巡检机器人(机械臂款)使用基于位置的视觉控制系统(PBVS),实际系统的工作过程如下:利用双目摄像机拍摄出机械臂巡检环境的图片,将其上传到上位机进行图片处理,完成对视觉对象的识别定位工作,并利用三角测量原理计算出视觉对象的三维坐标,得到的位置信息通过矩阵变换转换成机
械臂空间下的信息以便执行拟人化操作任务,机器人的位置信息上传至上位机处理,下发控制信号控制转向履带在不同路面上的行进。
最后对创新技术方案进行整理和评价,综合节约成本、可靠性、可维护性、易加工性、创新性等因素,上述技术方案中最优方案为5,较优方案为2、3、6、7,方案较差的是1、4,因此本创新创意最终方案确定为方案2、3、5、6、7相结合的方式。
五、结语
本文应用了功能分析中的组件分析、相互作用分析表、结果模型图、结构模型表和功能模型分析,因果链分析,最终理想解分析,九屏幕法,资源分析,技术矛盾,物理矛盾,物场模型分析和技术系统进化分析。
从方案实施情况及生产效益情况来看,国家近年大力推行智慧矿山,提倡无人化作业,转向履带式双目视觉矿用巡检机器人(机械臂款),有效降低人工成本,提高巡检、管理、日常操作和临危操作的智能化和无人化水平,提供了新型的识别算法与控制算法,具有巨大的社会效益、经济效益和安全效益。同时,本创新方案现已有某公司订单意向,并考虑战略合作及联合研发生产,为公司打开新市场提供了强有力的技术支撑。
责编 / 马铭阳