GNSS 漂流浮标实时在线波浪测量技术及其软件实现
2023-12-27 15:12王亚彬刘焱雄乔方利蒋暑民王岩峰
海岸工程 2023年4期
王亚彬,刘 杨,2,刘焱雄,2*,乔方利,蒋暑民,王岩峰
(1. 自然资源部 第一海洋研究所, 山东 青岛 266061;2. 自然资源部 海洋测绘重点实验室, 山东 青岛 266061)
波浪是一种重要且复杂的海洋水文要素。有效、稳定、长期地监测波浪,对海洋水文和气象研究、海洋资源开发利用,以及沿海农业、渔业生产等具有重要意义(戴洪磊等, 2014)。目前,波浪浮标是实现海洋波浪定点长期观测的主要设备,波浪观测技术的进步能够提高观测效率和观测精度。所以,研究和发展波浪浮标及波浪观测技术是提高波浪观测质量、组建波浪观测网、丰富波浪观测资料、促进波浪观测行业发展的必然需求(毛祖松, 2007)。
海洋观测浮标作为一种现代化海洋监测设备,因其具有定点、全天候长期观测的特点,在近些年海洋探索的进程中蓬勃发展。发达国家在这一方面的研发起步较早,起始于20 世纪30 年代末,至今一直处于领先位置。目前,在波浪测量领域,美国、英国、加拿大、荷兰、挪威等国家都在研发和使用波浪浮标,并布放于各自临海区域组建成网(王军成, 1998)。国外有代表性的波浪浮标主要有荷兰Datawell 公司的Directional Waverider 系列和法国的TRIAXYS 系列浮标。然而,我国海洋观测浮标的研制于20 世纪60 年代才起步,后续虽然已研制出各种类型的观测浮标及装备,并且覆盖了相当一部分海域,但搭载的仪器性能、测量精度和工作稳定性等方面,跟国外相比还有一定差距(毛祖松, 2007),这也在一定程度上阻碍了海洋观测工作的有效开展,进而影响到海洋资料的获取和积累。从国内海洋观测浮标研制开始,国内多家企业、高校和科研院所等对波浪测量领域进行了研究探索,并取得宝贵的经验和成果(王亚洲等, 2006; 唐原广等, 2008; 刘国栋, 2011; 齐占辉, 2019; 王斌等, 2021; 张新文等, 2023)。
关于国内波浪浮标,比较有代表性的主要有3 种(毛润雨, 2021):SZF 系列波浪浮标、SBF3 系列测波浮标和OSB 系列浮标。其中,SBF3 系列测波浮标还可利用橡胶弹性材料的锚系绳缆来进一步接近波浪的真实运动轨迹(孙金伟等, 2012)进而提高观测质量。截至2016 年底,测波浮标仍为国内主要的业务化运行现场自动测波仪器,我国海洋站中约87.5%的站点使用小型测波浮标进行波浪测量(常怡婷等, 2021)。
基于全球导航卫星系统(Global Navigation Satellite System, GNSS)的测波浮标取消了加速度传感器等元件,浮标位置与波浪要素依靠同一定位模块获得,以使浮标成本更低且更为小巧轻便易于布放。由于GNSS 模块逐历元定位,不存在系统误差的累积,不需要定期调校,所以,GNSS 测波浮标特别适合无人值守的长期监测。de Vries 等(2003)证明基于全球定位系统(Global Positioning System, GPS)多普勒测速原理的Datawell DWR-G 型号波浪浮标的测量精度与传统加速度计式波浪浮标相当,且能更好地用于研究远洋涌浪、港口或航道共振等形成的长周期波。同样,基于GPS 技术的漂流式波浪浮标Spotter,以其低成本、易操作、实时传输和紧凑的外形得以组成“实时海洋传感器阵列”,实现了在全球范围内布放(Raghukumar et al, 2019; Pierik et al, 2020)。但传统的基于动态后处理(Post Processed Kinematic, PPK)技术、实时动态定位(Real Time Kinematic, RTK)技术、精密单点定位(Precise Point Positioning, PPP)技术及多普勒测速技术的GNSS 波浪测量技术和波浪浮标,总会受到基站距离、通信成本、时效性及结果精度等方面的限制。本文研究了基于GNSS 载波相位历元差分算法的GNSS 漂流浮标实时在线波浪测量技术及其实现方法,给出了该技术硬件环境的选型、组成,以及实时在线软件的设计思路和工作原理,并进行软件实现。研究的GNSS 载波相位历元差分算法的漂流浮标实时在线波浪测量技术及其软件,能够在基于广播星历、无需基站及高额改正服务的基础上进行高精度实时波浪测量。并且,结合我国北斗卫星导航系统的发展,研究与北斗技术相结合的漂流浮标实时在线波浪测量技术,对实现波浪浮标国产化、打破国外设备垄断局面具有重要意义。
1 GNSS 实时波浪测量方法
1.1 GNSS 测速方法
基于载波相位历元差分原理的GNSS 实时波浪要素测量技术,仅使用广播星历即可得到高精度速度(单瑞, 2010; 刘会等, 2020; 刘杨等, 2020; Liu et al, 2022),差分后的方程为:
式中: λ为载波波长;ΔΦsr和esr分别为卫星s到接收机r 的相邻历元载波相位观测值差和单位矢量;Δξr为接收机相邻历元间的位置变化量; c为光速;Δδtr、Δδts分别为相邻历元间的接收机钟差、卫星钟差;Δpsr为相邻历元间包括卫星轨道、电离层延迟、对流层延迟、相位中心变化、相位缠绕、地球自转效应和相对论效应等在内的综合误差,其中由广播星历计算卫星轨道改正,由双频无电离层组合消除一阶项进行电离层改正,由气象数据及投影函数进行对流层改正,由天线模型计算相位中心变化,相位缠绕、相对论效应、地球自转效应等误差改正项也可以由相应模型算出;Δεsr为其他残余误差项与噪声;v为三维速度; Δt为相邻历元之间的时间间隔(刘杨等, 2020; 田力等, 2021;Liu et al, 2022)。
实际上,当求得解算速度并剔除粗差后,受海况、浮标位置、信号误差和其他噪声的影响,速度积分的位移结果存在趋势项(文圣常, 1984; 俞聿修, 2011; Herbers et al, 2012),因此,在剔除速度粗差并得到速度一次积分的位移结果后,还要去除线性趋势项,进而得到波浪位移信息,在此过程中考虑到波浪周期的范围(主要位于1~30 s),也可利用高通滤波来消除0.03 Hz 以下的低频噪声(Liu et al, 2022)。
1.2 波浪要素反演
在波浪要素反演过程中,须计算3 种主要的波浪要素,分别为波高、波周期和波向。
1.2.1 波高和波周期
海浪可视为各态历经的随机过程(俞聿修, 2011),因此可利用统计手段取样本中足够长的一段数据来分析总体数据的特性。通常利用上跨零点法对样本中的不规则波进行定义,故在上跨零点法定义不规则波的基础上,利用统计手段求取波高、波周期的步骤如下。
首先,将波浪高度序列Hi按照波高值由大到小依次排列:H1,H2,···,HN-1,HN;同理,波周期序列Ti排列为:T1,T2,···,TN-1,TN。然后,以前1/3 大波波高作为有效波高Hs,波列中所有波浪的波周期平均值作为平均周期Tm,则Hs和Tm定义(文圣常, 1984; 俞聿修, 2011)为:
1.2.2 波向
波向可利用方向谱提取。利用傅里叶变换法求解方向谱,计算速度快、不易发散且算法稳定,求解的主要步骤如下(Benoit, 1992; 毛润雨, 2021)。
首先,可由波浪特性观测值的傅里叶变换内积求得时间T内的交叉谱Smn(f):
式中:f为频率;Fm(f)为波浪特性m的傅里叶变换的共轭;Fn(f)为波浪特性n的傅里叶变换;Cmn(f)和Qmn(f) 分别为同向谱和正交谱。
然后,海浪的二维方向谱可以表示为有限阶数的傅里叶级数展开:
式中: θ为传播方向;A0、A1、A2、B1和B2为海浪二维方向谱的前五系数,可分别由6 个交叉谱求得,如:
最后,二维海浪谱S(f,θ)又为一维海浪谱S(f)与方向分布函数D(θ,f)的乘积,即:
一维海浪谱S(f)可由二维方向谱S(f,θ)在角度 θ上积分得到,因此得知二维方向谱和一维海浪谱后,便可以得出方向分布函数D(θ,f),进而得出成分波方向。
2 GNSS 漂流浮标实时在线波浪测量技术实现
GNSS 漂流浮标实时在线波浪测量技术的实现主要依靠实时在线解算软件及其硬件运行环境。实际测量时,海上测波浮标搭载的传感器等采集模块将测量得到的信号转换成观测值后,发送至浮标系统的主控模块进行所需参数的解算和缓存,解算完成后组成特定格式的交换报文由通信模块发送至岸基设备,完成一次观测任务。
实时在线解算软件作为实时在线波浪测量技术的关键,负责任务调度及协调各模块工作,能够基于GNSS 载波相位历元差分算法获得的高精度三维载体速度和位置进行波浪要素的反演(刘杨等,2020; Liu et al, 2022)。此外,基于GNSS 实时精密单点定位算法还可以在位置估算的同时得到天顶对流层延迟,进一步结合浮标实测气温、气压或者数值天气预报模型来反演得到大气水汽含量(刘杨等, 2022)。因此,浮标所采集物理量主要包括浮标三维位置、波高、波周期和波向,根据GNSS 算法及传感器的不同还可获得天顶对流层延迟,以及海水温盐和大气温压等其他海气环境参数。
硬件环境作为软件运行的载体,负责保证高效的数据采集和数据传输,提供充足的计算资源和缓存空间,是GNSS 漂流浮标实时在线波浪测量技术的外在支撑。在满足技术要求的前提下,硬件环境的合理选配有助于降低设备功耗,提高运行寿命。浮标部分硬件环境的结构示意图如图1所示。岸基部分主要负责接收、分析、存储浮标回传数据以及向浮标发送指令,由普通主机设备搭配信息接收模块和数据管理软件即可完成消息的接收与管理。
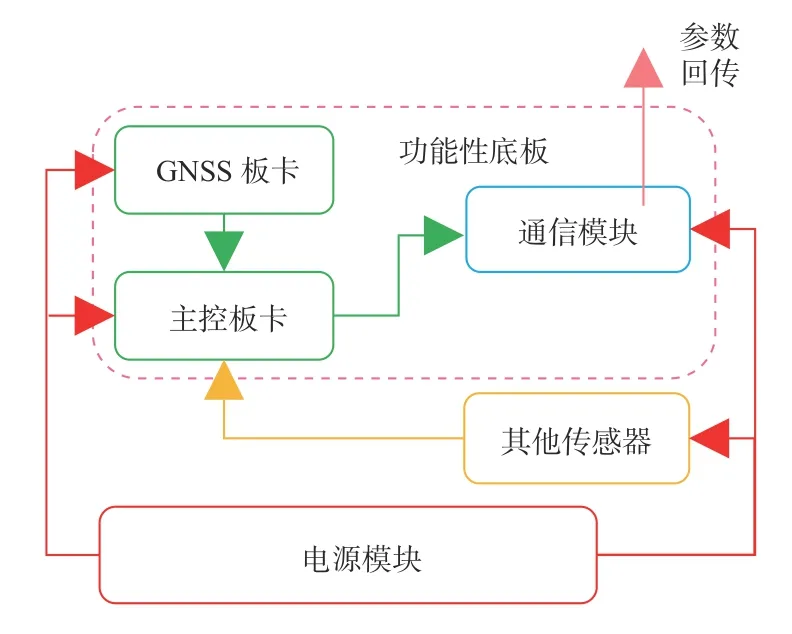
图1 GNSS 漂流浮标实时在线波浪测量技术硬件环境结构Fig. 1 Hardware environment structure of the real-time online wave measurement technology of GNSS drifting buoy
2.1 硬件设计
2.1.1 主控板卡
GNSS 漂流浮标设计采用商业级低功耗主控板,板卡内核基于ARM Cortex-A7 架构,采用2 组优质80 Pin 板对板连接器加强对外扩展,支持8 路UART、2 路以太网以及2 路CAN 等工业级总线接口,支持外接TF(Trans Flash)卡。板载处理器能够满足实时采集和处理的任务需求,多样的多路通信接口符合与多传感器的外部通信及后续的扩展需要,可扩展存储空间则保证了系统、软件以及长时间数据的缓存及存储。
2.1.2 GNSS 板卡
GNSS 板卡在GNSS 观测中起到关键作用。综合考虑观测质量、成本、国产化以及北斗PPPB2b 精密单点定位改正信号(涂满红等, 2022),可设计采用国产全系统全频GNSS 板卡。该板卡支持BDS-3 全球信号,以及BDS-2、GPS、GLONASS、Galileo、IRNSS、QZSS 和SBAS 等卫星信号,支持L-Band 星际增强,且支持抗干扰;标称测量准确度可达伪距≤10 cm,载波相位精度≤0.005c(c为载波波长,单位为m);采样频率最高支持20 Hz,支持RTCM3、RTCM2 以及NMEA-0183 等标准数据格式的输出。
板卡设置输出通用二进制RTCM3 格式信息,通过串口向核心板输入GNSS 观测数据与星历,数据流内部配置的输出报文如表1 所示。

表1 GNSS 板卡所配置的RTCM3 消息类型和内容Table 1 RTCM3 message type and contents configured for GNSS board
2.1.3 通信模块
通信部分主要包括浮标系统内部通信及浮标与岸基的通信。板卡级别的内部通信设计采用标准通信串口进行异步通信,将主控板分别与各类数据的采集模块及对外通信模块链接。对外通信模块主要负责将主控板处理和解算完成后组建的消息报文回传至岸基接收设备,或者将岸基指挥处的运行指令下达至浮标。考虑到远海使用场景,排除目前近岸短距离波浪浮标的2 种通信方式:海上无线短波通信和岸基移动通信(党超群等, 2016),可采用以北斗短报文通信为主,铱星、天通等卫星通信为辅的设计,通过卫星通信方式来保证全球范围内的消息回传。
2020 年,我国第三代北斗卫星导航系统——北斗三号卫星导航系统组网完成。北斗系统别具特色的短报文通信服务具备低成本、广覆盖、高可靠和随遇接入等特点,逐渐成为现今我国海上实时数据传输的重要方式,更成为许多浮标实时通信的选择(杨军平等, 2019; 姬生月等, 2021),可作为浮标的主要通信手段。天通一号卫星移动通信系统同样是我国自主研发的系统,与北斗系统共同为我国打破国外技术封锁,实现自主可控、国产化、低成本海洋设备提供了技术基础(李听听等,2021),保证了通信的国产化及信息安全性,可作为北斗短报文通信的补充。发展较早的国外铱星卫星通信系统的优势在于:其由66 颗环绕地球的低轨卫星组网,采用极地轨道和星际链路技术提高了通信的信号强度和可靠性(钟健瑜, 2008),能够在特殊地区或特殊环境下开展有效通信,但是通信费用较高,可考虑作为个别补充手段。
不同通信系统具有不同等级的报文传输限制。最新的北斗三号系统区域短报文和全球短报文服务的单次报文最大长度分别为14 000 bit 及和560 bit,分别约1 000 汉字和40 汉字。若采用北斗三号系统短报文通信为主要通信手段,可依据最大报文长度仅为560 bit 的全球短报文服务设计报文,报文回传GPS 周、GPS 周内秒、经度、纬度、高度、波浪高度、波浪周期、波浪方向以及其他环境参数等,对于更多的信息回传需求,还可通过压缩现有参数字节长度或增加消息包内报文数目来保证信息传输完整。
2.2 软件设计
2.2.1 软件架构设计
波浪实时在线测量软件是利用C 语言开发的。软件占用资源少,运行速度快,适于低级硬件平台的移植开发工作。软件采用命令行用户交互(Command User Interface, CUI)方式,运行在无图形桌面的主控板系统中,实时解算的配置选项可通过读入配置文件或命令行手动设置,整个程序采用多线程机制进行实时处理,整个软件的运行流程如图2 所示。

图2 软件流程示意图Fig. 2 A schematic diagram of the software flow
程序开始运行后,首先进入主线程做参数配置,并开启各子线程进行任务调度。当主控板得到GNSS 板卡的输入数据后,对数据解码和预处理,待一次采集完成后,由广播星历和观测值求取当前时刻载体速度,并将速度做一次积分,进而得到位移。之后,以设计的滑动窗口(例如窗口大小为30 min)进行滑动,对位移时间序列做去趋势或高通滤波处理,进而求取波浪要素的结果。在求取波浪要素的同时,其他子线程负责协同完成信息回传、时间同步和数据缓存等工作。
2.2.2 实时性能分析
实时处理软件采用多线程同步运行的方式,多线程包括数据处理线程和报文组建发送线程等,实时处理的耗时由其中耗时最长的线程决定。在单核CPU 主频1.8 GHz,内存512 MB 的虚拟机环境下进行处理时间测试,结果表明,数据处理线程运行3 000 次的单次平均运行时间为0.08 s,小于0.2 s 的GNSS 数据采样间隔,报文组建发送线程运行10 次的单次平均运行时间为0.05 s,软件满足实时运行需求。实际海上试验表明,在浮标硬件配置的实际运行环境中,在线软件运行稳定,未出现数据处理速度与获取速度不匹配和延迟的情况,软件满足实时运行需求。
3 试验数据
为验证GNSS 漂流浮标实时在线波浪测量技术及其软件的可行性和精确性,分别在近海和远海开展1 次海试试验,并对测试浮标实时回传结果进行比对验证。
2022 年11 月7 日至10 日,在青岛近岸海域(120°44′E, 36°14′N)进行近海海试试验,称为试验一。试验设备包括2 套内置实时在线软件的测试浮标(编号分别为1 号和2 号)以及1 套Datawell 公司的Directional Waverider 波浪浮标(型号为DWR-G4)。3 套浮标直径均为40~50 cm,布放现场如图3 所示。海试比测波浪参数包括有效波高Hs、平均周期Tm以及主波向D。

图3 2022 年青岛近海2 套测试浮标(1 号、2 号)与1 套波浪浮标(DWR-G4)布放现场Fig. 3 Site for the testing of 2 GNSS buoys (No.1 and No.2) and 1 wave buoy (DWR-G4)in the offshore area of Qingdao in 2022
2022 年2 月,选择南海及印度洋相关海域进行远海试验,称为试验二。在自然资源部第一海洋研究所远海航次中,于南海及印度洋相关海域布放4 套测试浮标,编号分别为3 号、4 号、5 号和6 号,测试浮标布放海域及轨迹如图4 所示。其中3 号、4 号和5 号浮标设置为连续采集工作模式,6 号浮标设置为间隔采集工作模式,即每间隔6 h 采集1 次,每次采集时间为1 h。

图4 2022 年4 套远海测试浮标(3 号、4 号、5 号和6 号)的轨迹Fig. 4 Tracks of 4 sets of the test buoys (No.3, No.4, No.5 and No.6) in the open sea in 2022
4 结果与分析
4.1 近海试验结果与分析
对比青岛近海海试(试验一)中1 号、2 号测试浮标实时回传结果与Datawell DWR-G4 浮标事后导出结果(图5)可知,总体而言,3 套浮标的有效波高、平均周期及主波向变化趋势基本一致。2套测试浮标与DWR-G4 波浪要素差值的绝对值最大值、差值的均方根结果(表2)显示:在3 d 左右的数据对比中,1 号测试浮标与DWR-G4 有效波高差值的绝对值的最大值为0.23 m,差值均方根为0.06 m;2 号测试浮标与DWR-G4 有效波高差值的绝对值最大值为0.18 m,差值均方根为0.04 m;1 号、2 号测试浮标与DWR-G4 平均周期差值的绝对值最大值分别为1.43 s 和1.12 s,均方根分别为0.48 s 和0.49 s。对比分析近海试验中2 套测试浮标实时回传结果与DWR-G4 事后导出结果表明,2套测试浮标要素反演性能良好,其中波高测量准确度符合主流波浪浮标技术指标,即0.1 m+5%H,H为波高(常怡婷等, 2021)。

表2 近海海试实时回传有效波高与平均周期反演结果Table 2 The retrieved results of the significant wave height and mean wave period that returned real-time in the offshore test
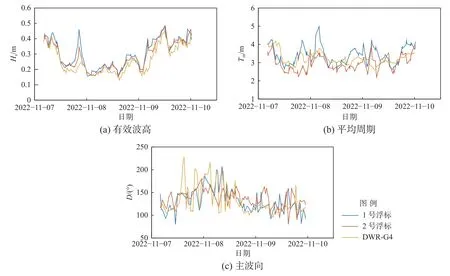
图5 2022 年青岛近海试验测试浮标实时回传结果与DWR-G4 对比Fig. 5 Comparison between the results returned real-time by the GNSS test buoys and those by the DWR-G4 buoy in the offshore test in Qingdao in 2022
4.2 远海试验结果与分析
因现场无其他设备比测,采用实时在线回传数据与欧洲中期天气预报中心(European Centre for Medium-Range Weather Forecasts, ECMWF)再分析波浪数据进行对比。ECMWF 再分析对比数据是1950 年1 月至今全球气候的第五代大气再分析数据集(https://cds.climate.copernicus.eu),本次试验选取数据集中风浪、涌浪共同作用下的有效波高作为本文有效波高Hs的参考值,平均周期作为本文平均周期Tm的参考值,数据空间分辨率为0.25°,时间分辨率为1 h,区域范围(25°~124°E,66°S~30°N)基本覆盖远海试验(试验二)4 套测试浮标在南海及印度洋的布放区域,时间从2 月到7 月。
2022 年远海试验(试验二)4 套测试浮标3 号、4 号、5 号、6 号实时回传结果与ECMWF 再分析数据的对比结果(图6)显示,测试浮标与再分析数据的有效波高Hs(图6a~图6d)和平均周期Tm(图6e~图6h)的变化趋势基本一致,说明测试浮标能够在远海海域实时回传波浪要素结果反映当地海浪变化趋势。

图6 2022 年远海试验4 套测试浮标(3 号、4 号、5 号和6 号)实时回传结果与ECMWF 产品的比较Fig. 6 Comparison between the results returned real-time by 4 sets of the test GNSS buoys (No.3, No.4, No.5 and No.6)and those by the ECMWF products in the open sea test in 2022
2022 年远海试验4 套测试浮标实时回传数据与ECMWF 再分析数据波浪要素之间差值的绝对值最大值、差值的平均值、差值的均方根结果(表3)显示,4 套测试浮标与对比数据的有效波高Hs差值的均方根最小为0.21 m,最大为0.47 m,平均周期差值的均方根最小为1.1 s,最大为3.4 s。平均周期Tm差值的平均值均为负值,结合平均周期(图6e~图6h)变化趋势,发现测试浮标反演的平均周期多数小于对比数据的平均周期。考虑到对比数据的精度和时空窗口限制,不能精确评估测试浮标的结果精度。后续需要进一步开展与现场实测数据的比测工作。

表3 远海海试实时回传结果Table 3 Results returned real-time in the open sea tests
5 结 语
传统高精度GNSS 方法受时间、距离和成本的制约,本文主要研究了GNSS 漂流浮标实时在线波浪测量技术及其软件实现方法。结合载波相位历元差分测速模型及波浪要素反演方法,给出该技术硬件环境的选型、结构设计和实时在线软件的实现策略,并进行了软件实现和实时处理速度测试。选择青岛近海(120°44′E, 36°14′N)、南海及印度洋(25°~124°E, 66°S~30°N)分别作为近海试验(试验一)和远海试验(试验二)的研究区域,对比分析了1 号、2 号(近海)测试浮标实时回传结果与DWR-G4 事后导出结果,以及3 号、4 号、5 号、6 号(远海)测试浮标实时回传结果与ECMWF再分析产品的开源数据结果,从而验证了GNSS 漂流浮标实时在线波浪测量技术及软件的可行性和精确性。本文主要结论如下。
1)硬件环境设计以主控板为核心,通过标准串口链接GNSS 板卡、通信模块及其他传感器,主控板读取GNSS 板卡及各传感器的观测数据,待数据解算完毕后组成特定报文,通过卫星通信技术发送至岸基接收设备。该硬件环境的组成和结构能够满足GNSS 漂流浮标实时在线波浪测量的任务需求。
2)实时在线波浪测量软件采用多线程机制。主线程负责运行参数设置、任务调度;各子线程同步运行,协调完成高精度位置和速度的解算、波浪要素的解算、报文回传、数据缓存以及时间同步等工作。软件实时处理速度满足实时采集和解算的任务需要。
3)近海1 号和2 号测试浮标实时回传结果与Datawell DWR-G4 事后导出结果表明,有效波高差值的均方根分别为0.06 m 和0.04 m,波高测量误差优于主流测波浮标产品技术指标(0.1 m+5%H,H为波高)。周期和方向的量值及变化趋势与对比的浮标结果基本一致,技术指标与国际主流产品相当。
4)远海4 套测试浮标(3~6 号)的实时回传结果与ECMWF 再分析产品比较结果显示,二者有效波高和平均周期变化趋势吻合良好,能够反映当地海浪实时变化趋势。相较于传统高精度GNSS 方法,GNSS 漂流浮标实时在线波浪测量技术及其软件无需基站配合,能够克服测量范围限制和避免差分改正服务费用。该技术只需卫星广播星历,即可在保证实时性的同时获取较高的测速精度,进行准确的波浪要素反演。
多次近海及远海测试结果验证了GNSS 漂流浮标实时在线波浪测量技术及其软件实现的可行性和精确性。但是,目前GNSS 漂流浮标测波仍有很多改进空间,如减少软件资源的占用以降低硬件配置需求,改进算法精度以提高反演结果的可靠性等。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09
家教世界·创新阅读(2023年2期)2023-06-07
家教世界(2023年7期)2023-03-22
家教世界(2023年4期)2023-03-04
学苑创造·A版(2022年4期)2022-06-18
海洋工程(2021年5期)2021-10-27
海洋通报(2021年3期)2021-08-14
中国港湾建设(2021年2期)2021-02-27
当代陕西(2020年24期)2020-02-01
水利技术监督(2019年6期)2020-01-01