基于电力仿真系统的数字功率放大技术研究
2023-12-25 03:08袁勇姚益平臧能义余志诚
环境技术 2023年11期
袁勇,姚益平,臧能义,余志诚
(1.新疆工程学院 控制工程学院,乌鲁木齐 830023; 2.新疆工程学院 教务处,乌鲁木齐 830023;3.新疆工程学院 工程训练中心, 乌鲁木齐 830023)
引言
电力系统仿真是研究电力系统各种物理现象的有效方法,主要有实物模拟仿真、纯软件仿真以及数字物理混合仿真[1]。实物模拟仿真能够较直观地观察电力系统所发生的现象,物理概念明确,但需要大量的实物设备,投资金额大,系统升级困难。纯软件仿真方便灵活,不受仿真系统的规模限制,但无法进行实物装置的仿真实验,真实度差。数字物理混合仿真中,一次系统采用实时数字仿真,二次系统采用真实物理模型,数字模型与物理模型通过数字功率放大器连接[2-5]。
大多数混合仿真系统中,需要先对数字仿真结果进行D/A 转换,再通过线性功率放大器与物理模型相连[4]。线性功率放大器由大功率的晶体管或集成运放构成,线性度好,输出波形畸变率较小,但其效率低,价格昂贵,而基于电力电子器件的数字功率放大器体积小、效率高,应用于电力系统混合仿真系统能够大幅度降低仿真成本。
本文提出用于电力系统混合仿真的数字功率放大技术,采用FPGA 作为整个控制系统的核心部件。在功率放大器的控制方法上,采用基于空间矢量的滞环控制,通过判断电流偏差变化率矢量的空间区域,选择合适的电压矢量,进而使电流误差控制在一定环宽以内。搭建实验平台,验证了方案的可行性。
1 仿真系统结构
电力系统混合仿真结构如图1 所示,图1(a)为传统的基于线性功率放大器的结构图,需要D/A 转换;图1(b)为基于数字功率放大器的仿真结构图,数字仿真结果无需D/A 转换,直接经数字功率放大器重现为与实际电流互感器、电压互感器二次侧一致的模拟量电流和电压,再输出到继电保护等二次设备。
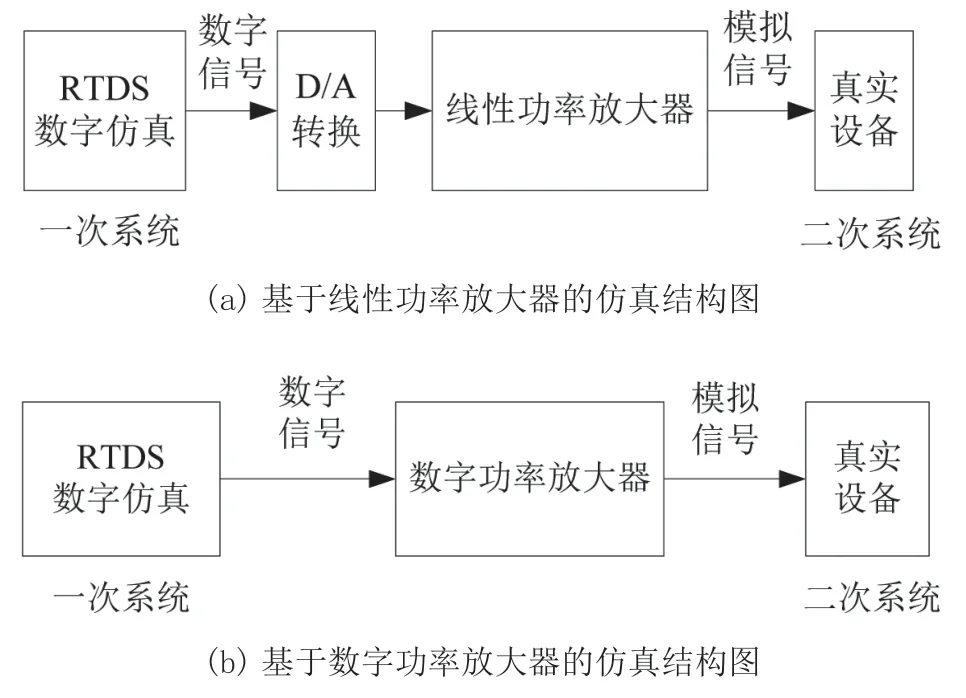
图1 电力系统混合仿真结构图
其中,数字功率放大器的系统结构如图2 所示,主控制芯片FPGA 接收采样值和RTDS 数字仿真输出的指令值,通过一定的控制算法输出PWM 脉冲信号,驱动如图3 所示的三相逆变电路,再经过滤波后得到与指令值一致的波形。
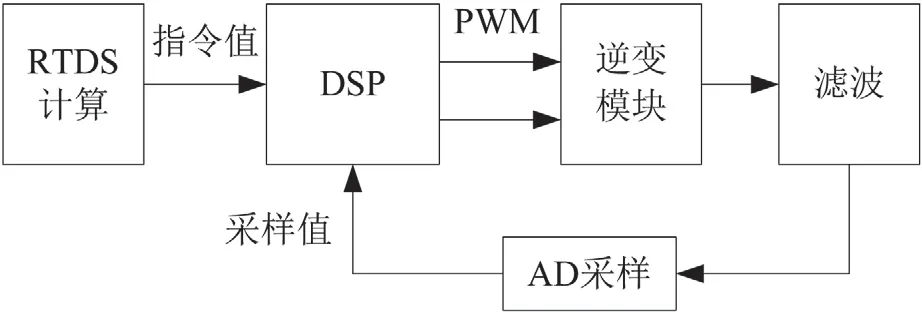
图2 数字功率放大系统结构
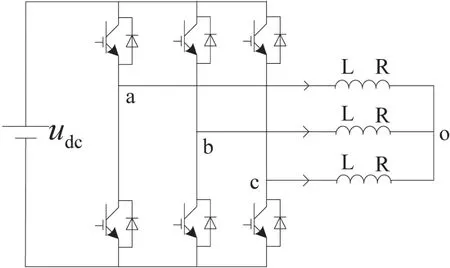
图3 三相全桥逆变电路
2 基于空间矢量的滞环控制策略
传统的电流滞环控制结构简单、动态响应快,但开关频率波动较大,对电力电子开关器件的性能要求很高,且在三相逆变电路中,由于存在相间影响,会导致稳态误差较大。空间矢量控制能够实现最优的开关模式,将空间矢量与滞环相结合的控制方法,既有良好的电流跟踪性能,又能有效降低开关频率[6-16]。
2.1 控制原理
对于图3 所示的三相全桥逆变电路,交流侧电压等式为:
式中:
Sk—开关闭合逻辑函数,如Sk=1,代表上桥臂开通,下桥臂关断,Sk=0,代表上桥臂关断,下桥臂开通,k=a,b,c。
三个桥臂总共有8 种不同的开关状态组合,将不同的开关状态组合代入式(1),得到电压值如表1 所示(电压以udc为基准)。
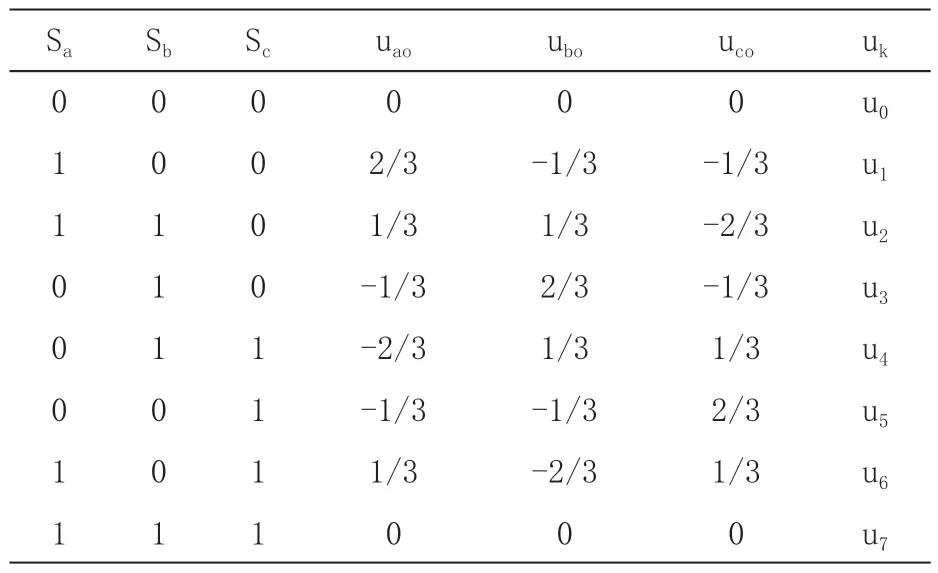
表1 不同开关状态时的电压
从表1 看出,不同开关状态时,三相逆变器的交流侧电压可在复平面上用空间电压矢量表示,如图4 所示,共计8 条电压矢量(V0⋅⋅⋅V7),一种开关状态对应一条电压矢量,该开关状态下的Vao、VboVco为该电压矢量在(a,b,c)上的投影。
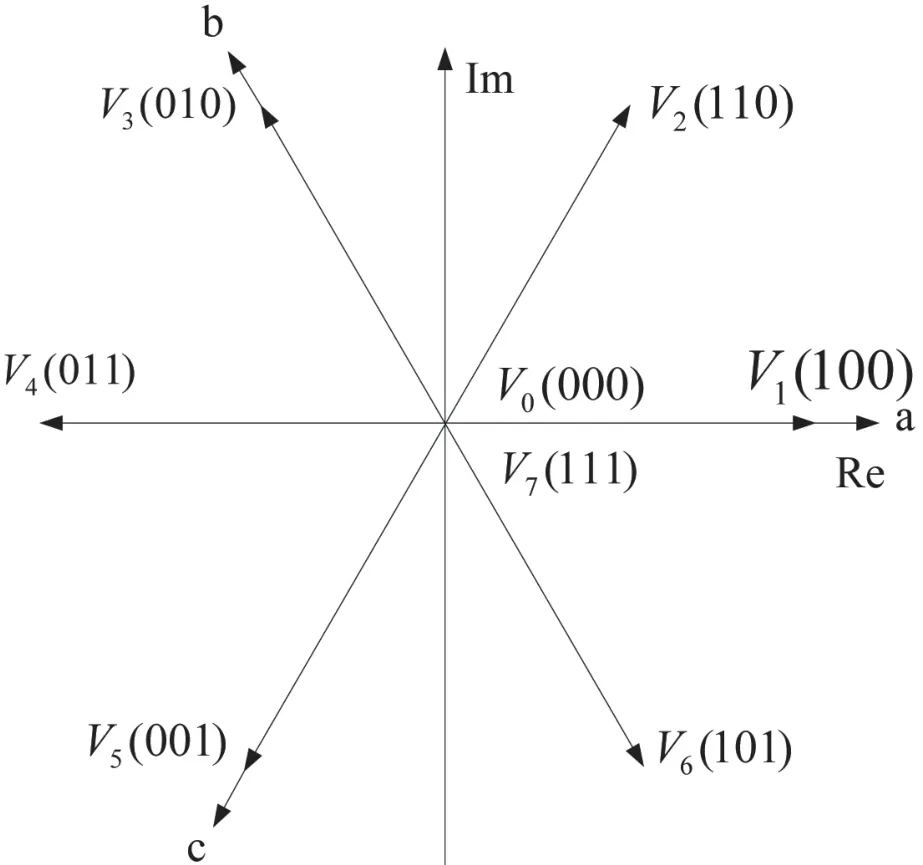
图4 三相电压空间矢量分布
由图3 所示的三相逆变电路,可得电压矢量方程:
式中:
u—三相全桥逆变器交流侧电压矢量;
I—三相全桥逆变器交流侧电流矢量。
若指令电流矢量为*I,则电流误差矢量为:
将式(3)代入式(2),并忽略交流侧电阻,有:
式(4)说明,误差电流矢量的变化率受指令电流矢量变化率和输出电压矢量的影响。若要使电流误差为零,则输出指令电压矢量应满足:
对于三相逆变电路,共有8 种开关组合对应的输出电压矢量uk( 0 7
k= ⋅⋅⋅ )可供选择,式(4)可写为:
将式(5)代入式(6),得:
式(7)表明,对误差电流为零的指令电压矢量u*,可选择适当的空间电压矢量uk(k= 0 ⋅⋅⋅ 7),以控制误差电流矢量的变化速率从而达到控制电流的目的。
2.2 开关状态选择
基于空间矢量的滞环电流控制方法如图5 所示,先将指令电流与采样电流通过一定宽度的滞环比较模块,输出对应的状态值并判断∆I所在的空间区域,同时判断指令电压矢量u*所在的空间区域,再由电压矢量选择模块输出适当的uk,进而选择相应的开关组合。
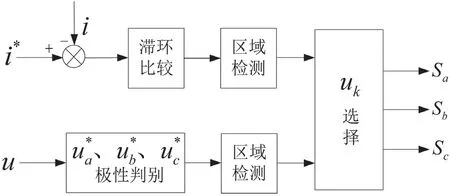
图5 基于空间矢量的滞环电流控制策略
由式(7)知,为了选择合适的电压矢量uk,需要确定指令电压矢量u*和误差电流矢量∆I所在的空间位置。图4 所示的三相电压矢量呈现在矢量空间的六个三角形区域,故可将指令电压矢量u*所在空间区域化分成六个三角形区域,如图6(a)所示,相应的对称坐标轴为(a,b,c)。∆I的空间区域划分为图6(b)所示,其对应的三相对称坐标轴为(x,y,z),电流滞环宽度为h。

图6 矢量区域划分
由式(5)计算指令电流变化率相关矢量LdI*/dt,可得u*矢量在坐标轴a,b,c上的投影,记:
式中:
式中:
u1*~u6*—u*区域1~6 的逻辑变量。
∆I矢量在图6(b)中的区域可从电流滞环比较单元输出逻辑确定。设电流滞环比较单元的输出分别为K a,K b,Kc,滞环宽度为h,记:
观察图6(b),通过∆I矢量在a,b,c三个坐标轴上分量 ∆ia、 ∆ib∆ic的正负极性判别,并由式(11)可得∆I区域判定的逻辑关系
式中:
∆I1—区域1~6 的逻辑变量。
由式(7)可知,为了实现对指令电流的跟踪,应选择一个适当的电压矢量uk(k= 0 ⋅⋅⋅ 7),使得d∆I/dt与∆I处于相反的方向。
要选定uk(k= 0 ⋅⋅⋅ 7),只需确定开关函数Sa、Sb、Sc的状态值即可,当一定的电压矢量uk选定后,开关函数也有相应的对应关系,根据表1 及*、I∆ 矢量所处区域的逻辑关系式(11)和式(12)综合分析,可得开关函数逻辑关系式:
按式(13)的逻辑关系即可确定三相逆变电路的开关通断状态,进而使输出电流跟踪指令电流。
3 实验验证
FPGA 能够实时快速地实现各种数字信号的处理。根据仿真系统的实时性要求,构建以FPGA 为控制系统的实验平台。其中,FPGA 选用Altera 公司的EP3C25Q240C8,功率器件选用智能功率模块PS21869,最大开关频率为20 kHz,采样芯片选用ADS8364,采样频率为100 kHz。在FPGA 中编程实现基于空间矢量的电流滞环控制算法,输出PWM 信号驱动三相逆变电路。
将某仿真系统分别在正常运行、单相短路故障、三相短路故障以及发生励磁涌流时的电流互感器二次侧数据作为电流指令信号,数字功率放大器的电流跟踪结果如图7 所示。
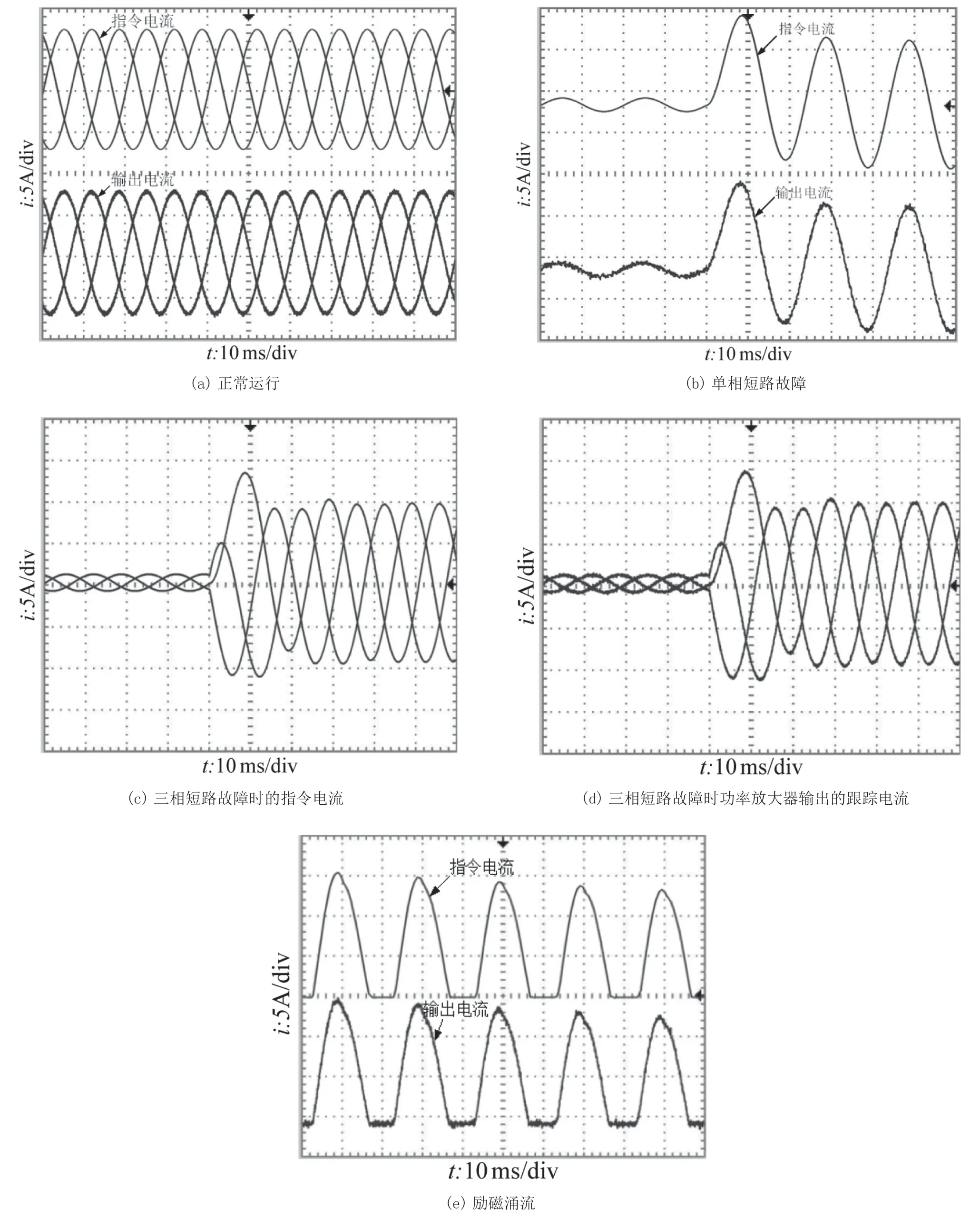
图7 电流跟踪效果图
由图7 可知,一次系统在正常运行、单相短路故障、三相短路故障以及发生励磁涌流时,数字功率放大器都能够将数字仿真结果放大为与实际电流互感器二次侧基本一致的波形,动态响应快,跟踪精度高。
4 结论
数字功率放大器作为电力系统混合仿真中的功率转换环节,体积小,效率高,能够大大节省仿真成本。采用基于空间矢量的滞环控制,动态响应快,输出波形品质较高,且数字化实现简单。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年4期)2020-07-22
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04