Design and implementation of bottle washing machine for bottled edible fungus factory
2023-12-16 04:08WANGJiaolingWANGMingyouWUJinjiDINGTianhangZHOUDehuanSONGWeidong
智能化农业装备学报(中英文) 2023年4期
WANG Jiaoling,WANG Mingyou,WU Jinji,DING Tianhang,ZHOU Dehuan,SONG Weidong
(Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing, 210014)
Abstract: Industrial production of edible fungi is the future development direction of China’s edible fungi industry.At present,the industrial production of edible fungi in China is dominated by wood-rotting fungi,and its production process includes bottling,sterilization and a series of links until the end of bottle digging.However,after bottle digging,the bottle cleaning still adopts manual cleaning,which leads to low washing efficiency and high labor costs.Based on analyzing the requirements of bottle washing in the industrial production of edible fungi,this paper introduces the working principle of bottle washing machines in the industrial production of edible fungi and designs the control system of bottle washing machines on this basis.Around the hardware and software system,this paper analyzes the functions and main model selection of the drive module,actuator module,sensor module,and designs the pneumatic drive system.According to the process of the bottle washing machine,using Guangyang SH-32R as a programmer,the electrical schematic diagram is drawn,and the control program of the bottle washing machine is written in level language.The trial production and test show that the bottle washing machine runs smoothly,the average pressure of the nozzle is 0.33 MPa,the water consumption of each bottle is 0.1 kg,and the single cleaning time is 10 s,which meets the requirements of industrial bottle washing.
Keywords: edible fungi;factorization;control system;bottle washing machine;PLC
0 Introduction
Edible fungi have a delicious taste,rich nutrition,and dual-purpose functions of food and medicine.Edible fungi have become the fifth largest crop in China after grain,oil,food,fruits,and vegetables,and have played an important role in national nutrition and food security[1-2].The industrialized production of edible fungi breaks through the traditional labor mode,better realizes the adjustment of growth factors,and greatly reduces the labor intensity.At present,China’s industrial production of edible fungi mainly focuses on the cultivation of wood-rotting fungi,and the main process of industrial production is as follows:preparation of culture materials → bottling →sterilization → cooling → inoculation → fungusgrowing culture → fungus scratching and water injection → fruiting management → harvesting → bottle digging[3].After the bottle digging,the bottle washing process is still mainly manual,and the efficiency is low,while the rapid circulation of bacteria bottles in factory production is a very important link.Therefore,the application of a bottle washing machine can promote the continuous and rapid circulation of bacteria bottles,which is of great significance to the normal production of the factory.At present,there is no report of factory production at home and abroad.Meantime the bottle washing machine on the market is not suitable for edible fungus bottle washing.First of all,the bottles to be cleaned in the pharmaceutical and beer industries are basically filled with liquids,and the bottles of medicine and beer are generally small,edible bottles such as medicine and beer have high requirements for hygiene,so they need to be soaked in alkali,sprayed,and labeled.Due to the large diameter of the edible fungus bottle and the sterilizer link behind it,2 sprays and brushes are selected to brush the bottle.The bottlefeeding method of the bottle washing machines such as medicinal bottles and beer bottles is flowing water,while the edible fungus bottle is washed in baskets due to the process characteristics of its factory production,so the bottle-washing method is carried out in baskets to facilitate the next round of production.Therefore,the bottle washing machine on the market is not suitable for cleaning edible fungus bottles.The development of technology at home and abroad and the demand for higher products will surely promote the birth of a new generation of bottle washing machines.
Generally,industrial production of edible fungi takes the frame as a unit,and 16 wide-mouthed fungus bottles are placed in a square fungus frame in 4 rows and 4 columns,and the processes of loading,inoculation,cultivation,and harvesting are carried out[4-5].The traditional and mature beverage bottle washing machine is not suitable for soaking and spraying because the bacteria bottles are mainly wide-mouthed bottles with heavy pollution and more residual culture materials.Therefore,it is necessary for the intelligent bottlewashing machine to further improve the industrial production process of edible fungi,which will greatly reduce the labor force and improve labor productivity.It is even more urgent to develop the control system of the bottle washing machine,which is the necessary condition for the stable and efficient operation of the bottle washing machine.
1 Working principle of bottle washing machine for industrial production of edible fungi
As shown in Figure 1,the basket-shaped bottle is cleaned by the whole frame,and the overall structure of the bottle washing machine is shown in Figure 2.

Figure 1 Basket of bacteria bottles
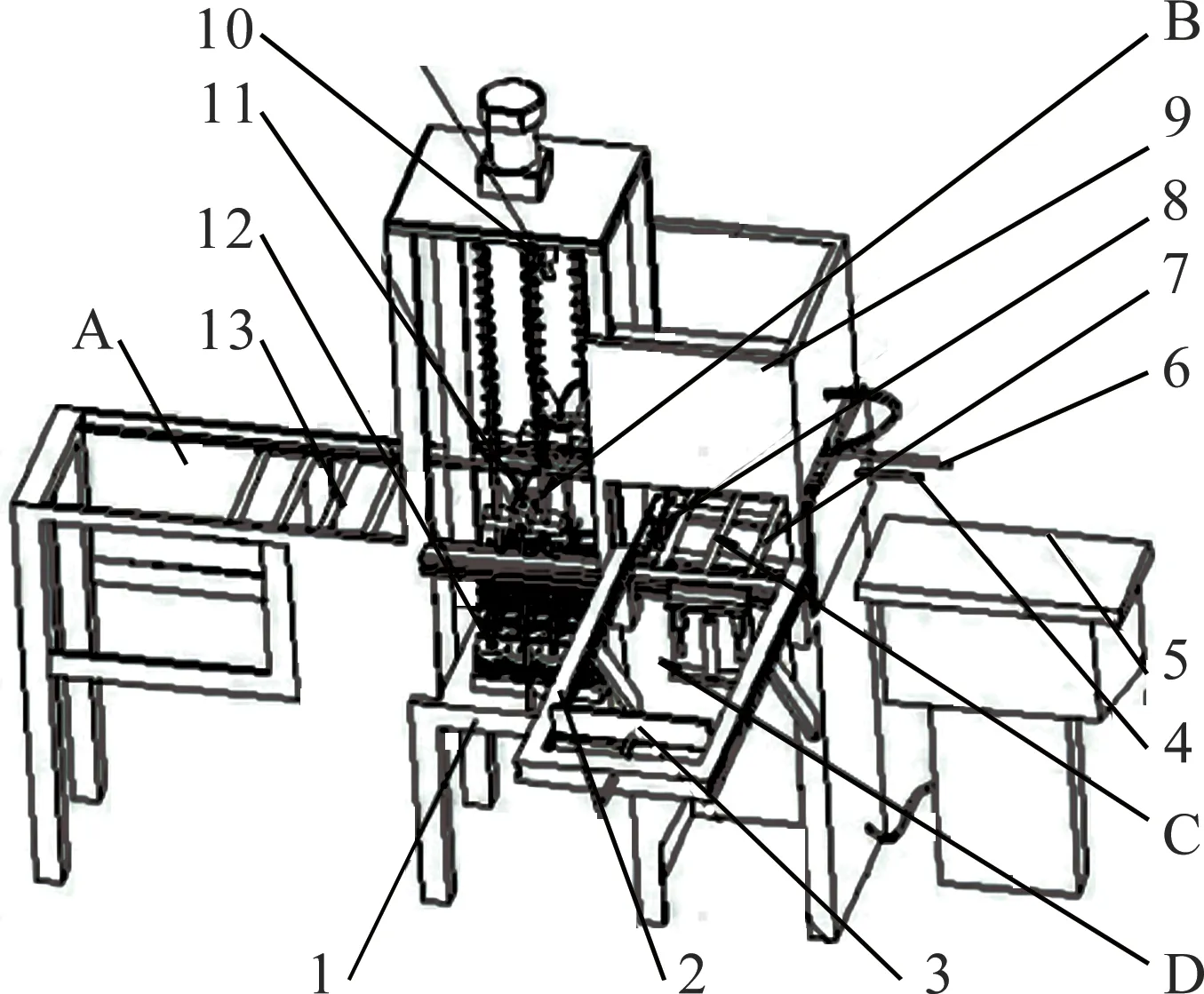
Figure 2 Overall structure of bottle washer
The structure of the bottle washing machine mainly includes a bottle feeding mechanism,pre-wetting mechanism,cleaning mechanism,and bottle discharging mechanism.Specifically,the process is that the rack is equipped with a bottle feeding guide rail.Because the industrial production of edible fungi bottles is placed in frames,a basket of bottles is inverted on the bottle carrying plate,which has a round opening just enough to cover the bottleneck according to the requirements.Then,the plate is placed on the guide rail,and the bottle-feeding push plate pushes the plate to the pre-wetting position pneumatically.The prewetting mechanism is to uniformly install pre-wetting nozzles on four pre-wetting water pipes to pre-wet the fungus bottles,of which four nozzles are uniformly installed in each,and a total of 16 nozzles are just equal to 16.Pre-wet the bottle through the nozzle on the prewetting water pipe,and stop spraying water after 2 s.After the bottle washing push rod pushes the bottle carrier to the bottle washing position,the framegrasping manipulator is shown in Figure 3.
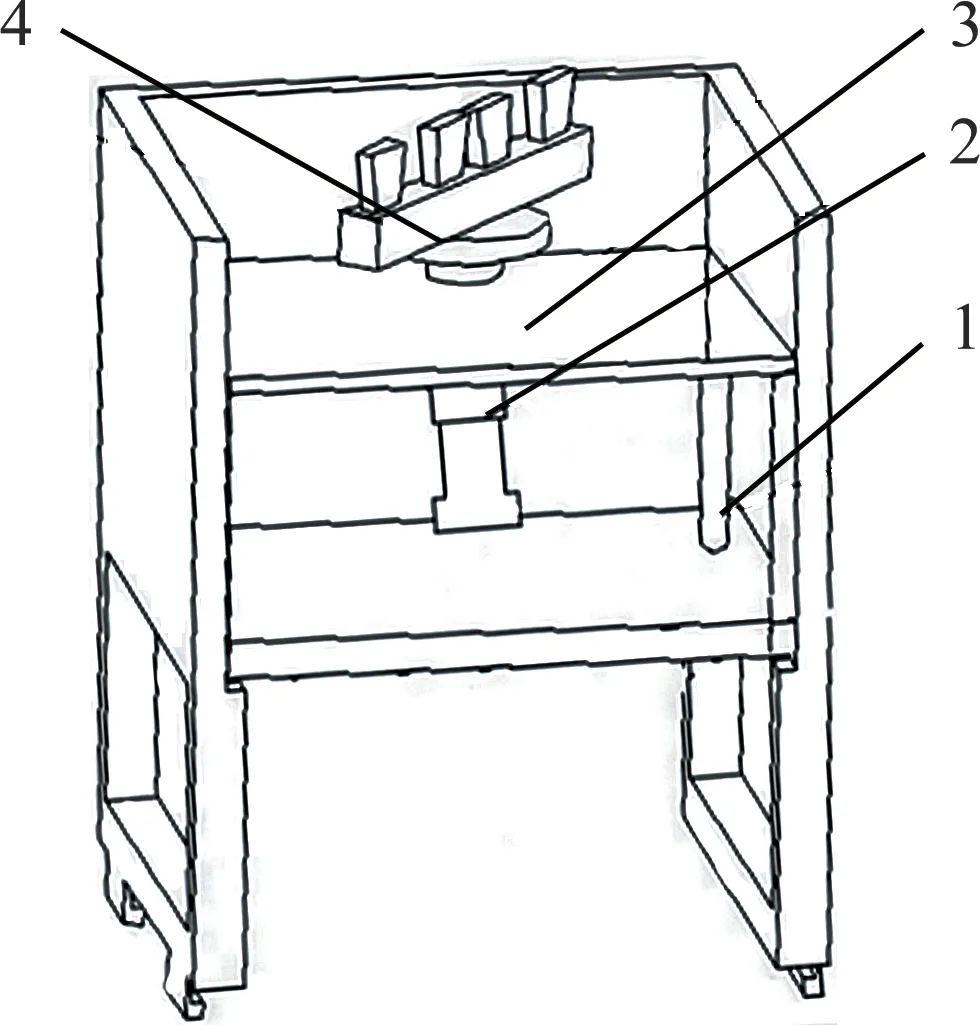
Figure 3 Structure of basket grasping manipulator
After the bottle basket is in place,the framemoving manipulator should grasp and lift it to the basket washing position,and after the basket brushing,relax the bacteria basket and lower it to the bottle washing position to wait for the bottle[6-7].The bottle washing box pushes the bottle washing box to the bottle washing position through the push rod.As shown in Figure 4,the bottle washing box uses a brush to clean the bottom of the fungus basket and the fungus bottle(Figure 5).The brush plate rises and extends the brush to the brush basket.At the same time,the bottle washing table is pushed to the bottom of the bottle washing position by the push rod,so that the brush enters the bottle.At the same time,the bottle washing motor and the basket brushing motor are connected,and the gears at all levels are driven step by step through intermediate gears.The bottle washing table cleans the bottle with 16 brushes.A brush is installed in the bottle washing box to clean the inner bottom of the basket,and a motor at the top of the bottle washing machine brushes the outer bottom of the fungus basket.After 2 s,the cleaning was stopped,the brush plate and the bottle washing box successively returned to their original positions,the frame grabber and the bottle washing table were reset,the fungus basket was pushed to the bottle discharging position for 1 s,and then the bottle washing was finished.Manually code the bottle frame for the next bottle washing.
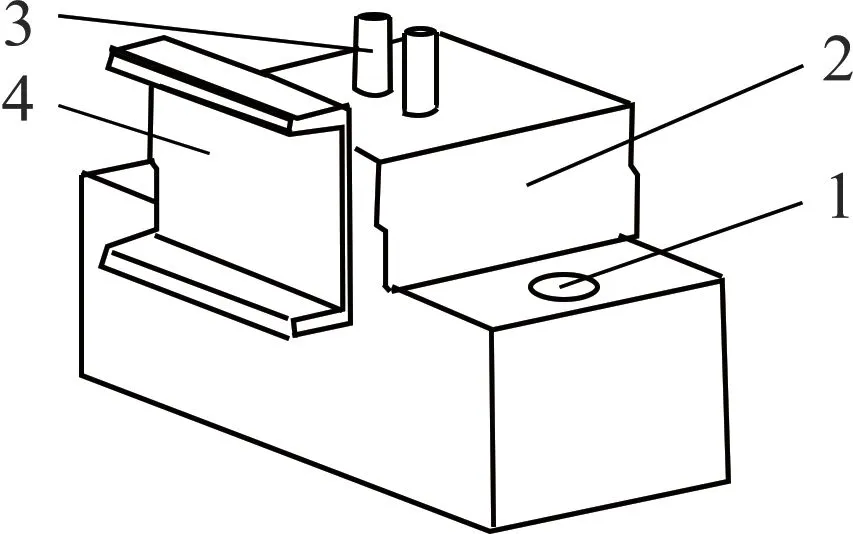
Figure 4 Structure of bottle washing box
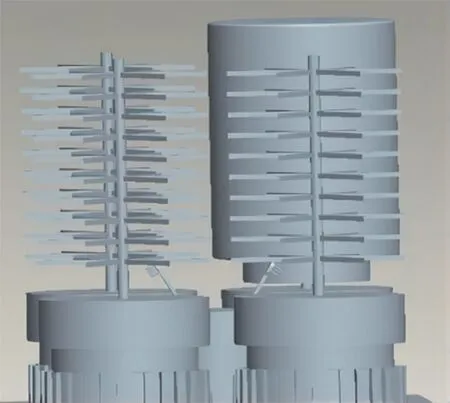
Figure 5 Partial view of bottle washing table
2 Hardware design of bottle washer control system
2.1 Selection and design of main modules
In this design,the system is controlled by dividing it into different modules.The control system[8-9]is composed of a driver module,an actuator module,and a sensor module.Driver module refers to drivers and related components.The driver amplifies the control signal output by PLC and then controls the execution module.For example,when the PLC controls the operation of the stepping motor,it needs to pass through the stepping motor driver.Because the stepping angle of the stepping motor is 1.8,subdivision can be used to control the motion accuracy of the motor more accurately.The motion control system usually uses PLC as the controller and frequency converter as the driver[10-11].
The main function of the execution module is to drive the controlled object.The actuator of the bottle washing machine adopts a cylinder and motor,and pneumatic transmission has the advantages of convenient operation,low cost,and high control precision[12-13].The transmission system of the bottle washer requires little driving force,and the stroke of a single drive is small,so pneumatic transmission is selected to realize it.
The motor system is used to clean the bacteria bottle and basket,and it only drives the brush and toothbrush to rotate in one direction,and there is no strict requirement for the number of revolutions and rotation speed.Therefore,the single-phase deceleration motor is adopted,so it is not necessary to choose the stepping motor,and the encoder and other components[14]can also be omitted.
The sensor uses sensitive elements to detect the change in external state,the physical quantity is converted into identifiable information by a conversion device and a conversion circuit transmitted to a programmer or relay[15].The measurement accuracy of the sensor is important to the control system,but its basic configuration is decisive[16].This design selects a Hall switch,which can detect the movement position of the bottle carrier plate and the bottle washing box,so as to realize more accurate control.Its model is shown in the Table 1.
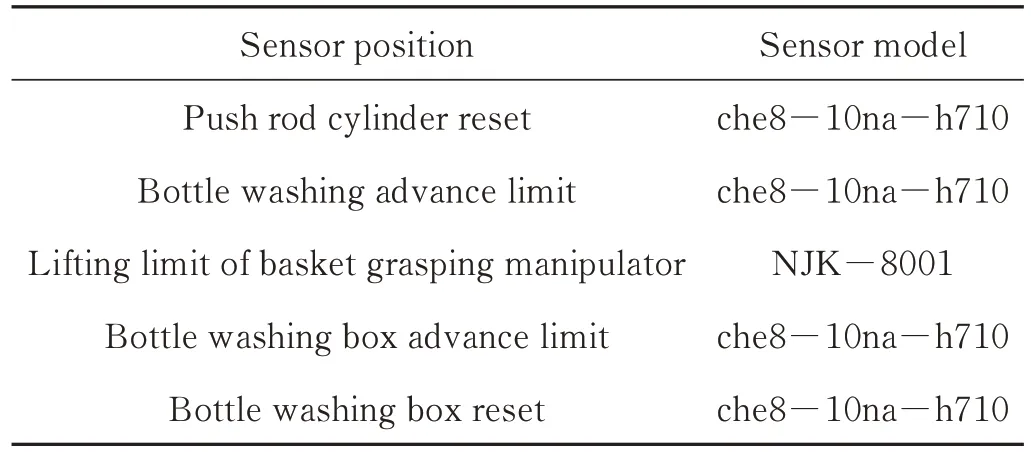
Table 1 Distribution of Hall switches
The motor system belongs to the executive module.In the process of bottle washing,the power and frame brushing is relatively small,so a single-phase motor is selected in this design.The single-phase motor uses a single-phase AC power supply,and its power is small,but it can meet the transmission requirements.Because the speed of the direct connection to the single-phase motor is too high,it needs to be decelerated.Considering the cost and installation problems,the deceleration motor is directly used,and the reasonable combination of a single-phase machine and reducer becomes a single-phase deceleration motor,which is of course completed in a professional factory.
Therefore,in this design,in the bottle washing stage,three deceleration motors are used to clean the bacteria basket and the bacteria bottle respectively.The specific models and distribution are shown in Table 2,and the rated speed is 300 r/min according to the motor parameters.2 motors are used to brush the inside and outside bottom of the basket,and the other one is used to brush the bottom and mouth of the bottle.The control of the motor is controlled by PLC using an AC contactor,and it is turned on and off at the same time.
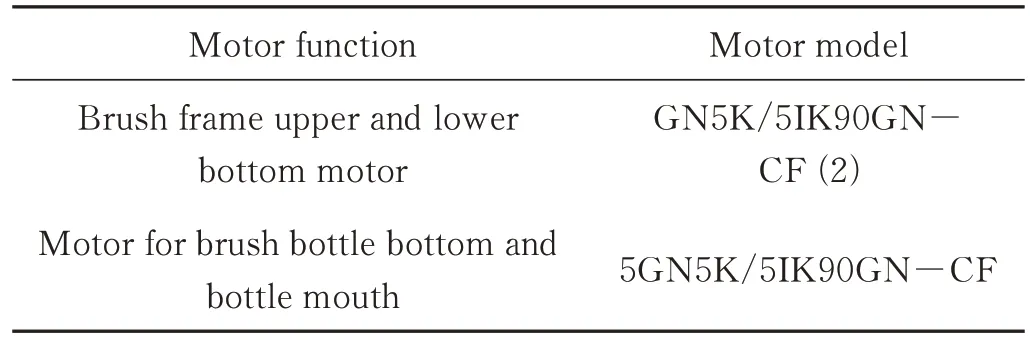
Table 2 Model of deceleration motor
2.2 Design of pneumatic transmission system
The pneumatic transmission control system uses an air source device to compress air,remove impurities,reduce pressure,etc.to prepare compressed gas that can be used by the cylinder.The cylinder uses compressed gas to advance and retreat or rotate,and these processes require control elements such as reversing valves.The control system is shown in Figure 6[17-18].

Figure 6 Composition of control system
In pneumatic transmission,the pressure energy of compressed gas is converted into mechanical energy,and the air pressure has an important impact on the air pressure system.The working pressure of the cylinder is generally,and here taken by 1 kgf/cm2=0.1 MPa.Test force:bottle board=30 N,bottle washing table=80 N,bottle washing box=50 N,brush board=65 N,basket weight=3.5 N,grasp basket hand=90 N.The efficiency of the cylinder is generally between 0.7 and 0.95,as taken hereη=0.9。
where,Fis cylinder theoretical thrust,kgf.
SoF1=3 N,F2=8 N,F3=5 N,F4=6.5 N,F5=0.35 N,F6=9 N.
The air source device is prepared into compressed and processed compressed air that can be used for cylinder drive.Generally,after the air compressor,the air compressor can drive the cylinder.The triples of the pneumatic system are the filter,pressure-reducing valve,and oil filter.The filter mainly filters out the moisture and dust in the gas;the pressure-reducing valve is to reduce the pressure of the compressed gas;and the oil mist device is to remove the oil in the gas,the triad is generally indispensable in the pressure transmission.
1)Calculation of gas consumption.Cylinder selection is shown in Table 3.
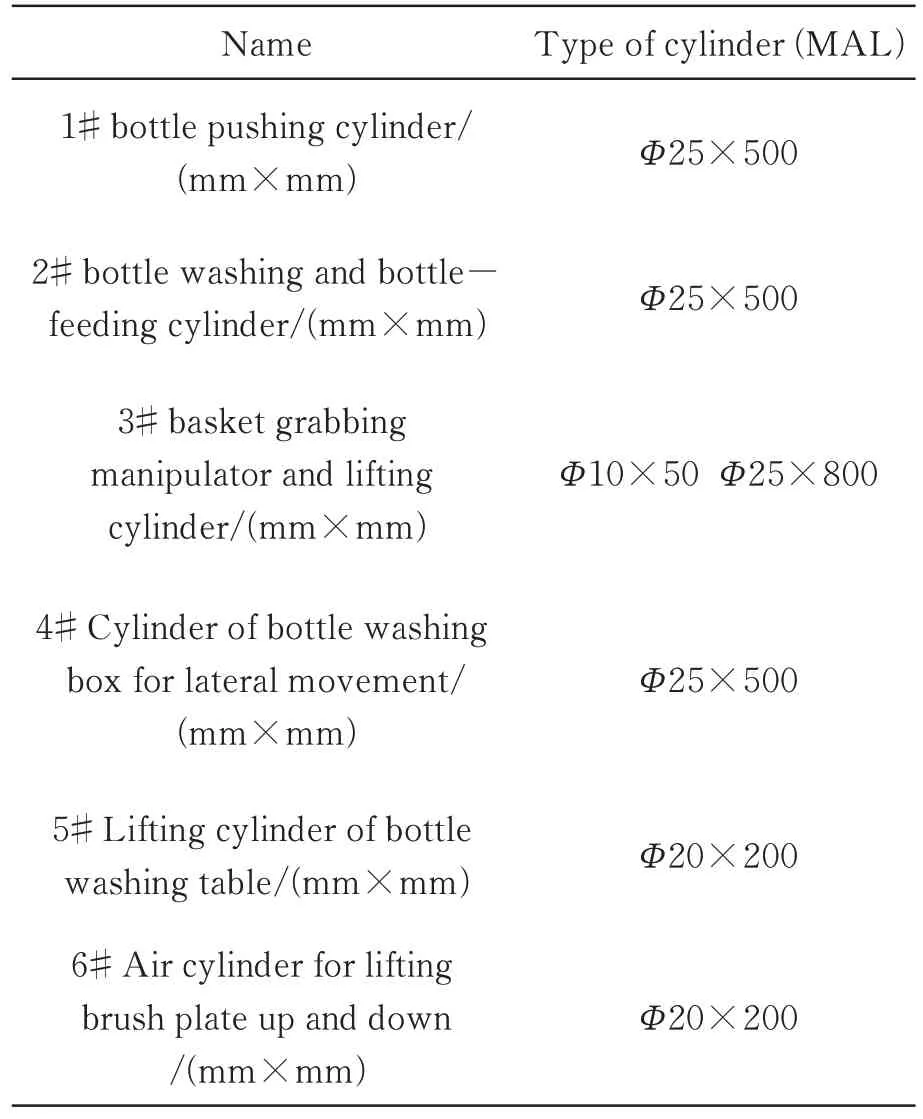
Table 3 Model of cylinder used in this design
Take the brush plate and bottle washing table cylinder MALΦ200 as an example,the cylinder diameterD=20 mm,strokeS=200 mm,the time required for the whole process ist=2 s.
Extended gas consumption:
Retraction gas consumption:
2)Calculation of the free air quantity:
Average gas consumption:
Similarly,the average gas consumption of other cylinders is calculated:push bottle and wash bottle=4.7×10-4m3/s,wash bottle box=2.3×10-4m3/s,manipulator lift cylinder:=1.43×10-3m3/s,grab basket hand=1×10-5m3/s.
3)Calculation of air supply of air compressor:
where,nis the number of cylinders;ais number of single-way actions in a cycle,Q’Zis verage gas consumption of the cylinder over a cycle,Tis singlecycle running time of the cylinder,φis utilization factor,K1for the leakage coefficient,take 1.15-1.5,K2for the standby coefficient,take 1.3-1.6.
Therefore,the air compressor adopts ZW-0.3/7 power of 2.2 kW,exhaust capacity of 0.3 m3/min and rated pressure of 0.7 MPa.AC2000-01 is selected according to the model triad of the air compressor,and the pressure range is 0-1.0 MPa to meet the pressure requirements.AC2000-01 triad is composed of a filter,pressure-reducing valve,and oil mist.It has a small quality and volume and can be combined or split.It is convenient for loading and unloading through an embedded structure,and the product structure design is reasonable and can be used on different occasions.The filter achieves the separation of liquid and solid through the high-speed rotation of the compressed gas,but checking the water plate regularly to avoid the use of a reducing valve and oil mist device is more conducive to the air pressure system.
There are six groups of cylinders in the pneumatic transmission system of the bottle washer,and their models are shown in the table:1#:bottle pushing cylinder,2#:bottle washing cylinder,3#:manipulator holding cylinder and manipulator lifting cylinder,4#bottle washing box cylinder,5# bottle washing table lifting cylinder,and 6# brush board lifting cylinder.In the pneumatic transmission system of the bottle washer,PLC is required to independently control each solenoid valve,and for the 1#,5#,and 6# cylinders,it will automatically reply after reaching the maximum stroke.For the 2#,3#,and 4# cylinders,after reaching the maximum stroke,they receive the signal from the Hall switch,and then return or cut off the power for a certain time.
At the same time,to solve the creeping problem of the cylinder in the ascent,a check valve,and a throttle valve are added to the loop.The following pneumatic system is designed according to the type of solenoid valve and air source.
There are six groups of cylinders in the pneumatic transmission system of the bottle washer,which are shown in the Figure 7.In the pneumatic transmission system of the bottle washer,PLC is required to independently control each solenoid valve,and for the 1#,5# and 6# cylinders,it will automatically reply after reaching the maximum stroke.For the 2#,3# and 4#cylinders,after reaching the maximum stroke,they receive the signal from the Hall switch,and then return or cut off the power for a certain time.
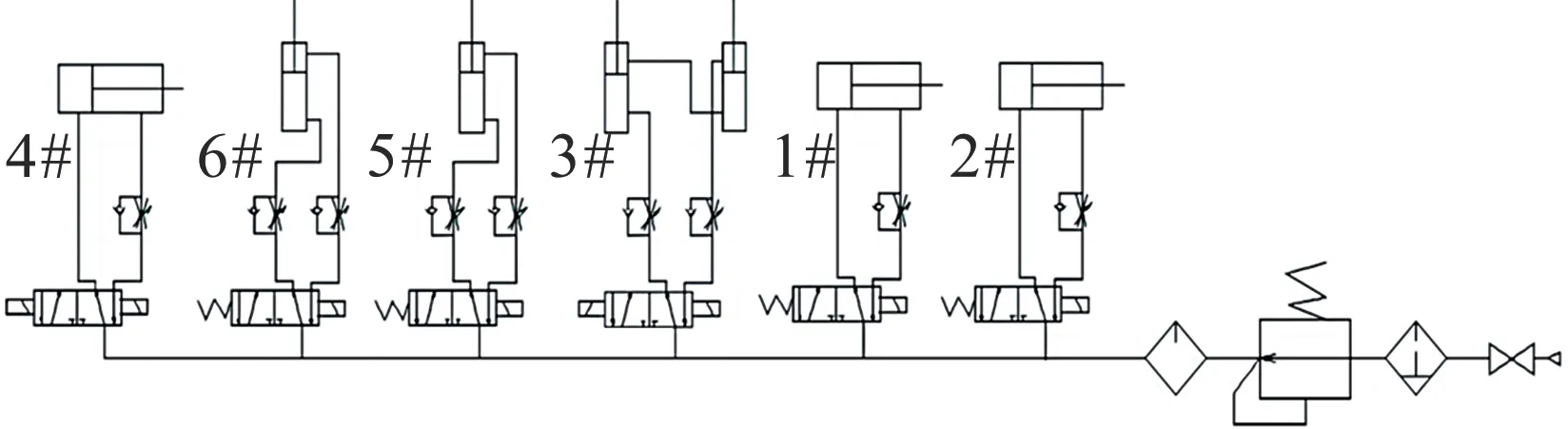
Figure 7 Structure diagram of the pneumatic system
In order to solve the creeping problem of the cylinder in the ascent,a check valve and a throttle valve are added to the loop.The following pneumatic system is designed according to the type of solenoid valve and air source.
3 Design of PLC program of bottle washing machine control system
3.1 Bottle washing program design
According to the working requirements of the bottle washing machine,its automatic bottle washing actions are bottle pushing,pre-wetting,bottle feeding,basket grabbing,bottle washing box positioning,bottle washing table and brush board lifting,motor turning on,water valve turning on,bottle washing starting,and bottle resetting.The specific flow chart is shown in Figure 8.
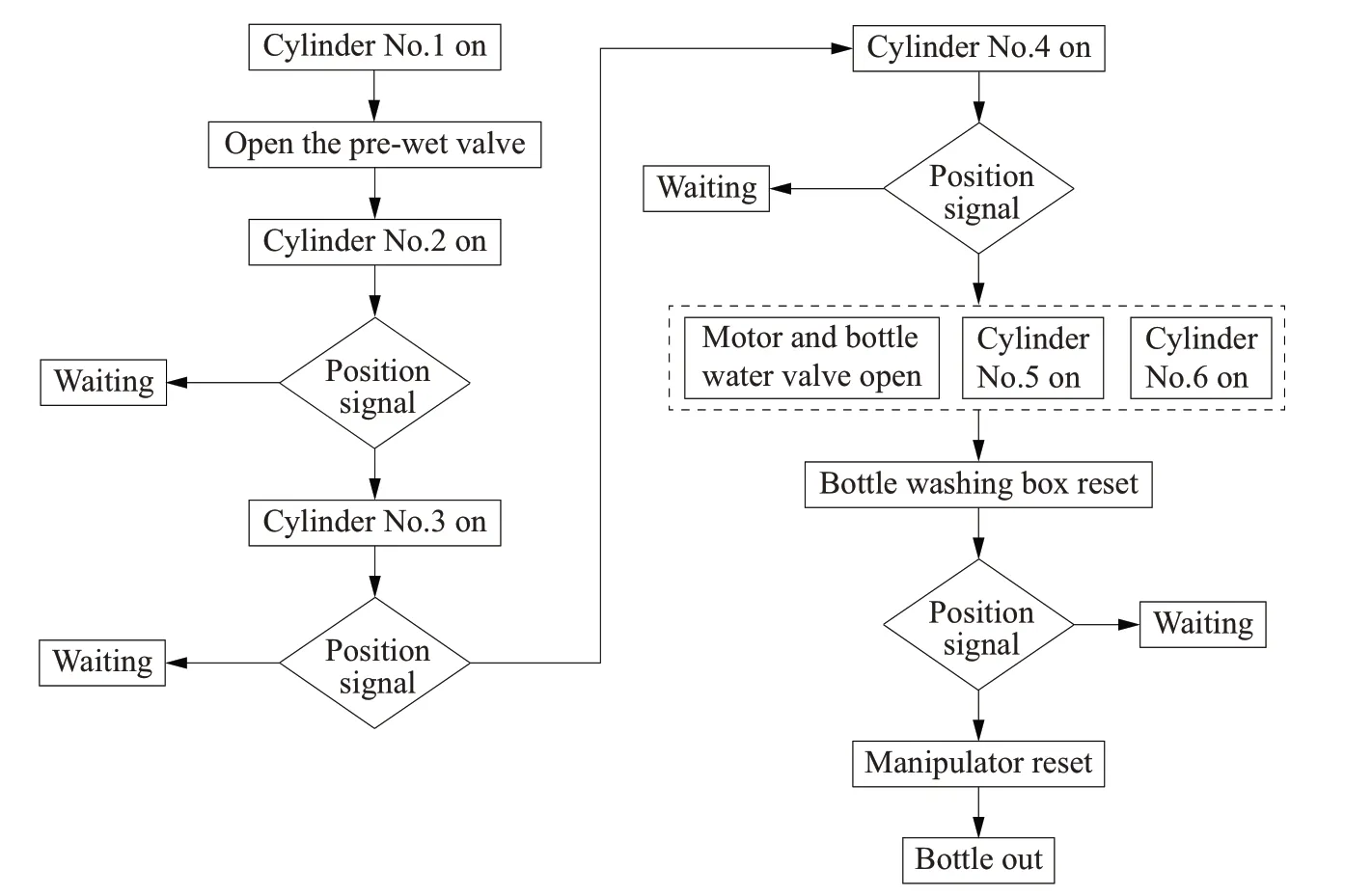
Figure 8 Flow chart of bottle washing
To control the start and stop of the bottle washer,start,stop and emergency stop buttons need to be set.The start button is used to start the bottle washer.If the stop button is pressed in the bottle washing process,it will not stop the bottle washing immediately,but will not circulate the bottle washing after this bottle washing.The emergency stop button is to immediately stop the ongoing action.To realize the one-cycle and cycle control of the program,a single button and a cycle button are set.The cycle button is called the run button here,which can run circularly.
In this design,according to the number of input and output points,Guangyang SH-32R is adopted,with 16 input/output points,a common anode input,and a built-in power supply.According to the hardware selection,interface allocation,and working requirements,the electrical schematic diagram is designed,as shown in Figure 9.
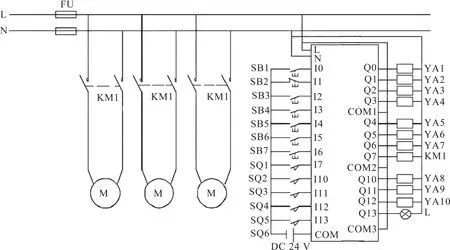
Figure 9 Electrical schematic diagram of bottle washer
The control program needs to be edited in the programming environment of Guanyang PLC.In this design,the hierarchical programming language can be used to quickly write a program,in which there are start,stop,emergency stop,cycle and single time.After the stop button is turned on,the program will not continue after this bottle washing.
The emergency stop means that all actions will be reset after being pressed in an emergency.The cycle button is to ensure the continuous operation of the machine,while a single cycle is a single-cycle operation,and it will not work after one cycle.The cycle button and the cycle button are controlled by alternating attributes in the switches of the touch screen.
3.2 Trial production and test
The designed intelligent control system is installed on the trial-made bottle washing machine.The bottlewashing machine is used for bottle-washing in factory production.The design requirement is to wash the bacteria bottles in a frame to meet the requirements of the next round of production.After debugging and improvement,the system can be put into practical use.
According to the written control program,the system is tested,and the bottle washer can meet the corresponding actions as required.The bottle washer runs smoothly and can meet the predetermined work requirements.After repeated testing and adjustment of various time parameters and pasting parameters,the logical relationship parameters are constantly optimized.
The average pressure of the nozzle is 0.33 MPa,the water consumption per bottle is 0.1 kg,and the single cleaning time is 10 s.In conclusion,the industrial bottle washing machine designed for edible fungi can not only meet the requirements of rapid bottle washing but also be safe and energy-saving,which fully meets the design requirements.
4 Summary
1)Based on the working characteristics of the factory production bottle washing machine,the working principle of the bottle washing machine is elaborated.On this basis,the control system of the edible fungus factory bottle washing machine is designed,including the hardware selection,design,PLC selection,and program design of the driving module,sensor module,and air pressure system.
2)The bottle washing machine runs smoothly,the average pressure of the nozzle is 0.33 MPa,the water consumption of each bottle is 0.1 kg,and the single cleaning time is 10 s,which can meet the predetermined working requirements.
3)The research and development of industrial bottle washing machines for edible fungi realize automatic and rapid cleaning of the bottles,improve the industrial production process of edible fungi,greatly reduce the labor force,improve labor productivity,and promote the leap-forward development of industrial production.