变电站巡检机器人的上位机监控系统设计
2023-12-14 11:09彭沛博
通信电源技术 2023年19期
彭沛博
(国网湖北省电力有限公司随州供电公司,湖北 随州 441399)
0 引 言
在无人值守变电站中,设备巡检移动机器人能够对设备进行巡检,及时发现设备缺陷和异物悬挂等异常现象[1]。上位机系统能够对巡检移动机器人进行自主控制或远程遥控[2]。为高效、准确地控制设备巡检移动机器人,提高设备巡检移动机器人的运动性能,设计一款可控制的上位机系统十分重要。
树莓派4B具有低功耗、高性能、体积小等优点,适合作为上位机与设备巡检移动机器人控制器之间的桥梁,能实时监控并控制设备巡检移动机器人的位置、速度等[3-4]。此外,树莓派4B具有串口,因此设计上位机系统时采用RS-232通信方式。RS-232模块可通过转换接口连接USB设备,实现计算机、上位机间的通信。
上位机系统主要包括3个部分,分别是计算机、监控计算机以及上位机软件[5]。计算机主要负责采集数据、发出命令,并对数据进行解析和显示。监控计算机负责监控管理上位机系统,协调各模块。上位机软件是整个系统的核心。上位机软件接收控制命令并解析和执行,然后通过串口将执行结果发送至计算设备。除了基本的控制功能,上位机软件还具有显示数据和图像信息等功能。
变电站设备巡检移动机器人上位机软件包括功能模块、运动控制模块以及路径规划模块等。功能模块负责接收控制命令和信号,对数据进行处理。运动控制模块则根据控制数据分析运动轨迹和速度,并进行显示。路径规划模块可以控制变电站备巡检移动机器人运动,记录轨迹动向,通过记录规划运动轨迹。
1 系统软硬件设计
1.1 系统硬件设计
树莓派是一种仅信用卡大小的微型计算机,其操作系统是基于Linux操作系统发展而来的一种系统,也可以使用Windows操作系统来运行树莓派。自问世以来,树莓派的应用十分广泛。树莓派的硬件结构如图1所示。
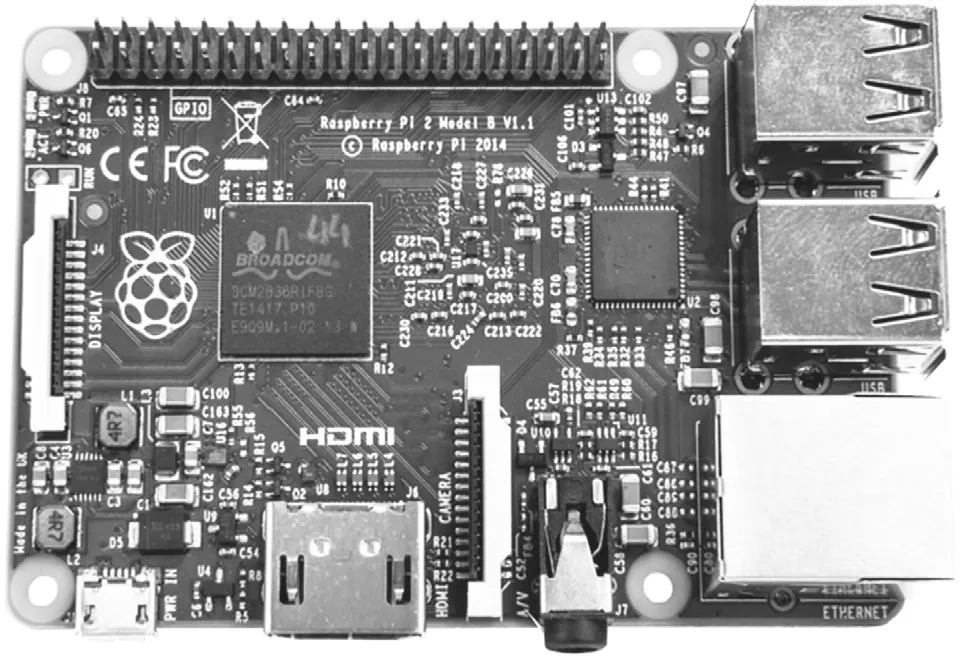
图1 树莓派硬件结构
1.2 软件设计
上位机软件是设备巡检移动机器人的控制中心,设备巡检移动机器人上所配置的传感器、电机以及控制器都是由上位机控制软件控制的。上位机控制软件应具备人机交互界面、较好的实时性和可扩展性。人机交互界面应具有操作简单、简洁明了的特点,能够为用户提供良好的操作环境。上位机控制软件应具有实时性,能及时接收并处理设备巡检移动机器人传输的数据,同时及时响应用户的要求和指令。考虑到未来可能的需求变化和功能增加,设备巡检移动机器人的上位机控制软件应采用能够扩展的功能模块,以便后续根据需求增加复杂的功能。
文章设计的上位机控制软件采用Python语言进行编写。上位机软件需要实时监控设备巡检移动机器人的工作状态,也要规划设备巡检移动机器人的进行轨迹。上位机软件具备实时监控、实时轨迹模拟、工作状态记录、参数设置以及复位舵机等功能。上位机软件要实时监控上位机控制软件的工作状态,并根据需要在关键点安装一个定时器中断。定时器中断可用于触发定时任务,监控系统是否能执行任务。为了调试设备巡检移动机器人轨迹规划,需要通过上位机系统模拟设备巡检移动机器人的运动轨迹。当设备巡检移动机器人执行完某个任务后,记录任务执行结果,以便后期定期查看和分析。通过上位机软件的人机交互界面,用户可以设置设备巡检移动机器人的运动参数,如速度、方向等。上位机软件应能够保证设备巡检移动机器人能回到初始位置。在执行任务过程中,如果机器人出现故障或偏离指定路径,可以通过复位舵机功能将其准确地复位到初始位置,以便重新开始任务。
1.3 控制命令
本设计采用IP地址连接方式进行连接,需要编写上位机控制系统的通信程序,实现树莓派4B与上位机之间的通信。通过以太网输入IP地址建立与树莓派的远程连接,可以通过传输控制协议和网络协议(Transmission Control Protocol/Internet Protocol,TCP/IP)发送指令到上位机。上位机解码指令,然后通过串口发送数据给树莓派4B,实现树莓派4B与上位机之间的通信。上位机解析数据后,会发送相应的控制指令。树莓派4B接收到数据后,做出相应动作。
使用时应注意树莓派4B与上位机之间使用远程通信连接。发送命令的顺序为先发送控制命令,再发送指令。在发送控制命令之前需要确定先发哪一个命令,如果没有明确,则将模块添加到队列中,等待发送。接收到控制命令后,需要等待一段时间才能发送命令。如果在控制命令前有其他控制任务需执行,可以提前终止当前执行的任务。
1.4 用户界面设计
上位机控制系统的人机交互界面是人与机器进行交互的核心窗口,包括普通模式、调试工具、数据展示3个主要部分,其性能直接影响设备巡检移动机器人控制系统的性能。
上位机控制系统的人机交互界面与树莓派4B之间的数据交互通过串口实现,这种交互形式被称为同步数据。当上位机需要发送命令时,树莓派4B应发送相应的控制命令,然后上位机控制系统的交互界面才能实时显示数据。
本设计采用NoMachine作为开发平台来设计上位机系统软件,实现与树莓派4B的数据交互,控制设备巡检移动机器人的运动。利用NoMachine开发平台的图形用户界面(Graphics User Interface,GUI)开发工具包可以便捷地实现图像信息、数据信息的读取和显示。
在普通模式中,人机交互界面又分为3个小界面,分别是设备巡检移动机器人参数设计图框、命令控制按钮以及运动轨迹编号表。
在设备巡检移动机器人的参数图框中,用户可以修改各个关节、移动自由度的参数,从而控制设备巡检移动机器人展现不同的姿态。同时,通过人机界面实时显示设备巡检移动机器人的位姿,以便进行监控和调整。命令控制按钮主要用于对设备巡检移动机器人的编辑动作进行保存操作、运行操作、复位操作以及读取位姿偏差操作等。运动轨迹编号表主要用于保存设备巡检移动机器人的运动轨迹,并控制设备巡检移动机器人自动化的轨迹与位姿。
在舵机调试工具中,用户可以调节设备巡检移动机器人中舵机的角度范围、输入电压范围以及舵机移动的角度偏差。
2 通信设计
下位机与树莓派4B之间的通信主要是通过下位机控制系统发出控制指令,然后树莓派4B接收控制指令,并执行控制指令。在此过程中,下位机需要给树莓派4B的串口通信供电,然后才能给树莓派4B发送命令。为了使下位机能够及时发现并接收来自树莓派4B的串口数据,下位机使用定时器中断方式不断查询串口数据。设定定时器中断响应时间为20 ms,即每20 ms刷新一次。
上位机与树莓派4B之间通过TCP/IP协议实现通信。首先,上位机作为客户机建立TCP/IP连接,并指定端口号,然后通过套接字发送数据。这些数据可能是命令、参数或文件等。其次,树莓派4B接收上位机发送的数据,并进行解析处理,根据指令执行相应的操作。最后,树莓派4B将结果发送回上位机,如成功的标志。
3 操作结果分析
通过控制按钮调整舵机旋转角度,控制设备巡检移动机器人的各种姿态,验证上位机监控系统设计的有效性及其和树莓派4B之间通信的准确性。设备巡检移动机器人编号为1的初始位姿如图2(a)所示,通过控制按钮编辑的第2个位姿如图2(b)所示,通过控制按钮编辑的第3个位姿如图2(c)所示。第2个位姿与第3个位姿的变化为:第1个舵机的旋转角度不一样,因此第2个位姿的夹取装置为水平方向,第3个位姿的夹取装置为垂直方向。
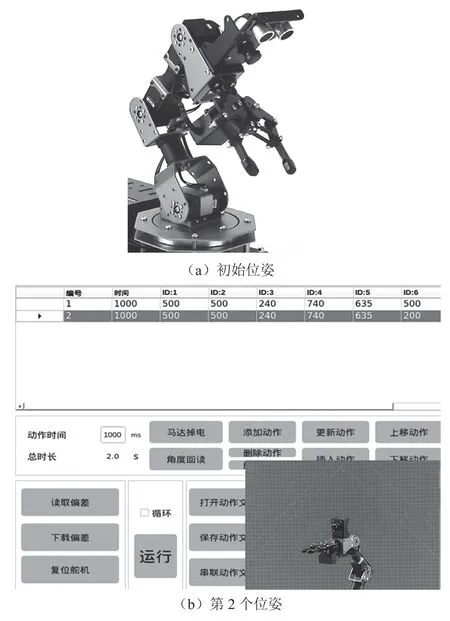
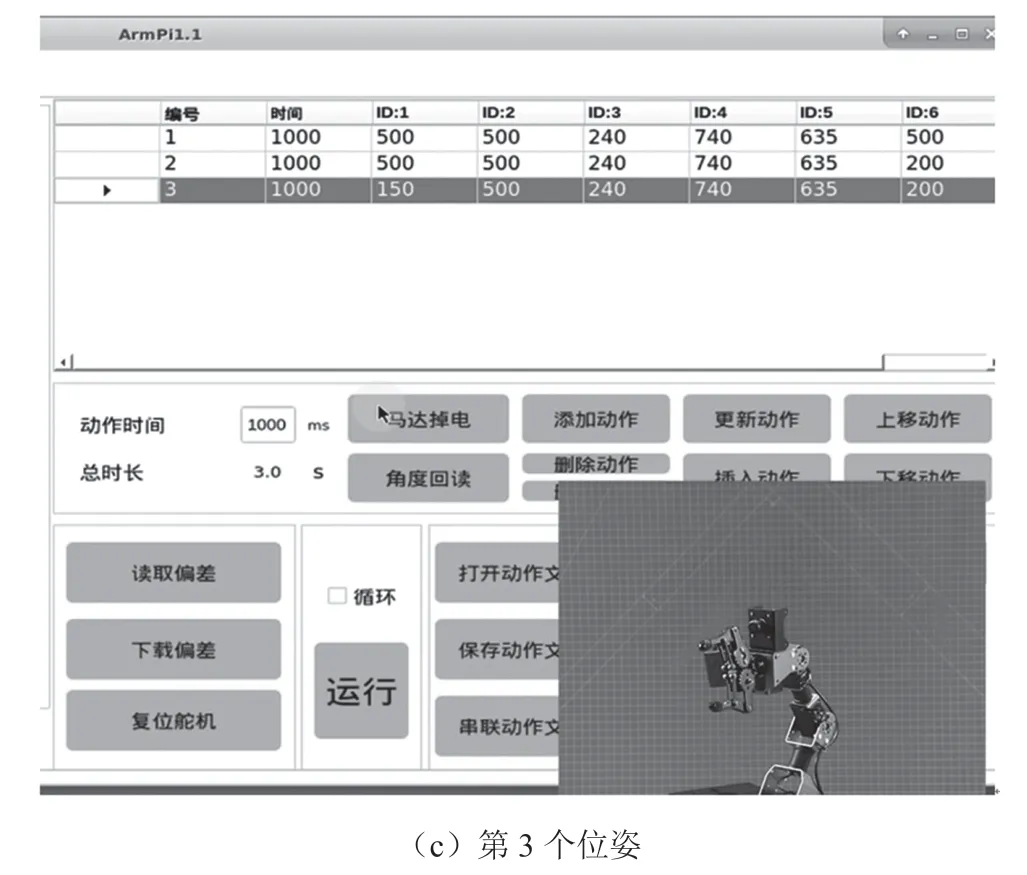
图2 设备巡检移动机器人的位姿控制
由图2可知,该上位机系统能够控制设备巡检移动机器人的位姿。通过控制位姿,该设备巡检移动机器人能够及时夹取掉落在设备上的异物,防止设备出现高压击穿等问题。
4 结 论
文章介绍了变电站设备巡检机器人的上位机系统的总体设计方案,通过全面监控的方式,可以大幅提高变电站的智能化程度,同时提高设备运行的安全性与可靠性。该方案不仅适用于变电站的巡检机器人,还可以扩展到其他领域,如电厂的巡检机器人、换流站的巡检机器人等。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
电子制作(2019年11期)2019-07-04
电子制作(2017年17期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
铁道通信信号(2016年12期)2016-06-01
测绘科学与工程(2016年5期)2016-04-17
中国酿造(2016年12期)2016-03-01
电子器件(2015年5期)2015-12-29
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28