无人机低空摄影测量POS 数据关键信息提取的程序化实现
2023-12-14 08:53:52王春生屈儒夏卫新林大明
水利水电工程设计 2023年4期
王春生 屈儒 夏卫新 林大明
1 无人机低空摄影测量发展情况及技术优势
1.1 无人机低空摄影测量发展情况
无人机低空摄影测量的技术发展比较迅速,已经在多个领域中得到了应用,在我国许多企事业单位对无人机低空摄影测量技术的应用也是非常广泛的。
无人机低空摄影测量技术,以获取高分辨率数字影像为应用目标,以无人驾驶飞机为飞行平台,以高分辨率数码相机为传感器,通过3S技术在系统中集成应用,最终获取小面积、真彩色、大比例尺、现势性强的航测影像数据。无人机低空摄影测量主要用于基础地理数据的快速获取和处理,为制作正射影像、地面模型或基于影像的区域测绘(或地质测绘等)提供最简捷、最可靠、最直观的应用数据。
1.2 无人机低空摄影测量技术优势
无人机具有灵活机动的特点,受空中管制和气候的影响较小,能够在恶劣环境下直接获取影像,即便是设备出现故障,也轻易不会出现人员伤亡,具有较高的安全性。
无人机可以在云下超低空飞行,弥补了卫星光学遥感和普通航空摄影经常受云层遮挡获取不到影像的缺陷,可获取比卫星遥感和普通航摄更高分辨率的影像。同时,低空多角度摄影获取建筑物多面高分辨率纹理影像,弥补了卫星遥感和普通航空摄影获取城市建筑物时遇到的高层建筑遮挡问题。
2 无人机低空摄影测量数据内容
无人机低空摄影测量是通过航摄系统对某测区进行拍摄,获取航摄影像数据和POS 数据。其中POS数据的关键信息为影像数据名和航摄瞬间航摄相机的空间位置数据、旋偏(飞行方向水平角)、俯仰(抬头或低头)、横滚(左右方向偏转)姿态等数据。
采用不同的航摄镜头,所记录的POS数据内容格式也有所不同。采用大疆M300搭载塞尔102S五镜头进行航摄时,其记录的POS数据每一行的先后顺序内容依次为:照片名称,摄影瞬间摄影中心纬度,摄影瞬间摄影中心经度,摄影瞬间摄影中心高度(大地高),摄影瞬间摄影中心相对起飞点高度,摄影瞬间主光轴俯仰角度,摄影瞬间像平面左右横滚角度,摄影瞬间机头朝向方位角等信息,详细内容见表1。

表1 采用赛尔102S五镜头获取的POS数据的格式
采用WP-E2 云台镜头进行航拍时所得原始POS 数据格式为每行数据中包含的数据顺序依次为:POS 记录序号,记录日期,航摄时间秒数据(自当日0:00开始算起整秒数值),航摄瞬间毫秒数值(千分制秒),航摄瞬间摄影中心位置处经度,航摄瞬间摄影中心位置处纬度,航摄瞬间摄影中心位置处大地高度,航摄瞬间无人机内置RTK 解算精度状态代码数据,RTK 固定解的经度值的误差精度值,RTK 固定解的纬度值的误差精度值,RTK 固定解的大地高度值的误差精度值,摄影瞬间主光轴的俯仰角度值,摄影瞬间像平面的左右横滚角度值,摄影瞬间飞机前进方向的方位角度值等信息,详细内容见表2。

表2 采用WP-E2云台镜头获取的POS数据的格式
通过表1、2的数据格式对比可知,虽然POS数据均包含该有的关键信息,但是其记录的数据格式各不相同。
3 程序设计思路及优势
为了能够自由灵活的变换POS数据,以满足不同摄影测量商业软件在数据处理时对数据格式的不同要求,现应用Microsoft Visual Basic 6.0 程序语言进行设计和编制了无人机低空摄影测量POS数据提取应用小程序。该程序主要包含源数据、目标数据格式的定义,数据分隔符的设定、对应名称列的字头字尾内容添加设置,目标数据的定义,输出数据文件的格式选择和2款常用软件的固定POS 格式的选取等部分。
该程序在界面设计时,源数据窗口和目标数据窗口以及待转换的外业航摄时记录的原始POS文件所在的文件目录窗口,均采用Microsoft Visual Basic程序语言中的ListBox列表框控件进行有关信息的输入及输出控制;通过CommandButton 命令按钮控件实现有关的源数据格式和目标数据格式的变换和设置;通过添加按钮和删除按钮实现目标数据格式的指定确认,且在调制设置过程中实现目标文件格式和源文件格式间相互关联和联动;通过多个Option单选按钮控件实现目标格式文件的分隔符设置,且开放了自定义分隔符的设置定义;通过多个Check复选框控件实现的目标:一是实现需要在目标文件相应的字符字段中添加的内容,目的是实现POS记录名与航摄获取的影像相片名称相对应匹配,二是实现目标文件的格式定义设置,如目标格式文件是文本格式(扩展名为txt)或CSV(逗号分隔)的电子表格文件;三是实现针对满足常用航测数据处理软件对POS数据格式要求的设置和数据包含内容选取的设置定义,如常用软件Context Capture 和大疆智图软件。
为了便于软件使用者的应用,程序界面相应位置处采用Label标签控件进行有关操作的提示,另外可根据各按钮控件上的标示文字内容能够辨别出软件操作方法及相关操作指令。从软件窗口的格局上划分,上部区域包含源文件、目标文件及各文件输入输出格式项的相关内容设置,中部区域为待操作文件的显示区域,下部区域是各种操作执行命令区等。
通过程序化处理的优势在于,能够快速高效的进行格式变换和相应内容的修改或添加补充,且不容易出现差错。程序对于源数据内容中各数据的列信息支持通过点击“+”或“-”符号按钮进行灵活的自由增减。在源数据的基础上设置需要提取的内容目录即构成目标数据格式,可通过点击“添加”、“删除”按钮实现由源数据至目标数据有效数列的设置,且数列顺序可自主灵活调整。
简而言之,实现程序化提取POS数据中的关键信息操作过程主要分3步:首先设置源数据和目标数据的文件格式;其次选择待提取信息的原始POS文件;最后实现提取文件的生成,即程序通过内部转换代码实现关键POS信息的提取并生成新的POS文件。简易流程如图1所示。

图1 执行程序操作过程示意图
4 应用实例
在无人机低空摄影测量实施的过程中,镜头的选用与野外采用的航飞方式直接关联,且对于成果的质量和外业航飞的工作效率及安全性有本质的影响。镜头的选用主要是根据被航摄区域的地形地貌特征和成果要求达到的地面分辨率高低以及工程区植被覆盖率大小等综合因素,并与所采用的航飞方式的安全性评估相结合,在现有条件的基础上综合决策,选取最佳最适合的航摄相机镜头进行航飞设计及实施。
依据贵州某工程区进行的无人机低空摄影测量工作为例,该工程采用大疆M300 搭载韦博云台WP-E2单镜头进行作业区航拍,最终达到地面分辨率为5 mm 的实景三维模型。在内业三维模型生产过程中,采用了程序化方法,对航飞过程中采集的POS数据进行了关键信息的提取,并成功应用于后续的三维实景模型的生产工作。
该工程在实施过程中由于采用的是WP-E2 镜头,所以在数据处理过程中有较为特殊的情况,即每一架次的POS 文件中的记录序号都是由自然数1开始起算依次递增,而拍摄存储的照片文件名却是从某一数字开始连续递增,造成POS数据中的照片名称序号与实际照片文件名称不能够一一对应,给POS数据的生产应用带来麻烦。面对这种情况,采用程序化处理方法解决,在程序化处理选项中设置好正确的POS信息的起始序号,程序内部编码在执行时自动处理并实现一一对应关系,省去人为编辑修改环节,大大提高工作效率。
通过程序化处理后的POS数据能够成功应用于大疆智图、ContextCapture(简称CC)等商业处理软件。本例是将程序化处理后的POS数据应用于大疆智图软件,进行空中三角测量及优化处理直到三维实景模型的生成。其程序化处理界面示意如图2所示,通过程序化提取POS关键信息得到的最终有效POS 信息的成果数据见表3,经过空中三角测量数据处理后合格的成果数据即可应用于最终的三维实景模型生产了,最终的三维实景模型效果如图3所示。
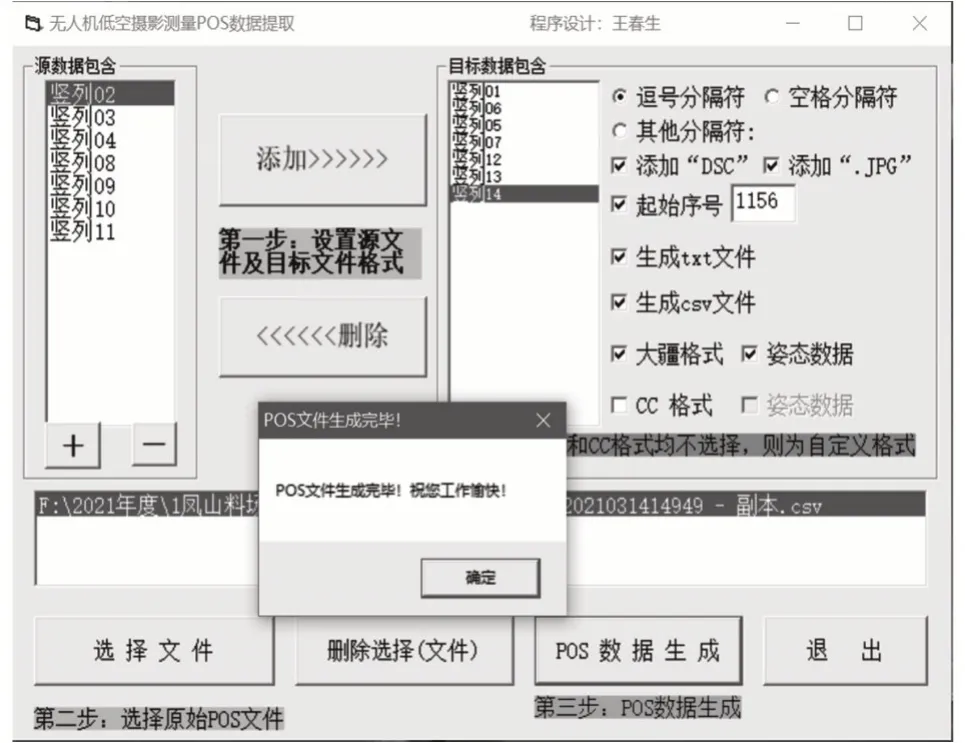
图2 程序化提取POS关键信息程序执行界面示意图

图3 三维实景模型效果示意图

表3 程序化提取POS关键信息得到的最终有效POS信息的成果数据样表
5 结 语
随着测量技术手段的不断发展进步,数据处理工作量也越来越大,大多数情况下工程项目留给测量的生产时间非常紧张,必然造成测量外业完成后的内业数据处理的时间压力非常大,在数据处理的多个步骤环节中采用程序化处理手段,如程序化提取航飞POS数据的关键信息的方法,能够极大的提高工作效率,缩短内业数据处理的时间,为项目测量成果能够尽快提供使用打下坚实基础。
通过在实际工程中的实践应用,采用程序化方法实现无人机低空摄影测量系统POS数据提取关键信息是完全可行的方法手段,实际应用效果显著,在数据处理环节大幅缩短时间,希望此方法能够在以后的航空摄影测量生产项目数据处理环节中起到参考借鉴作用。
猜你喜欢
智能制造(2021年4期)2021-11-04 08:54:32
电子测试(2018年1期)2018-04-18 11:52:49
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
中国科技信息(2016年19期)2016-10-25 08:15:09
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
兵器知识(2016年2期)2016-01-29 16:45:07
中国卫生标准管理(2015年10期)2016-01-15 00:48:57
中国卫生标准管理(2015年24期)2016-01-14 09:29:10
淮南师范学院学报(2015年3期)2015-03-22 01:16:16