医科达INFINITY 直线加速器机架旋转系统简析
2023-12-12 14:58申建平
中国设备工程 2023年23期
申建平
(泰兴市人民医院医学装备科,江苏 泰兴 225400)
医科达INFINITY 直线加速器采用医科达公司新一代一体化数字控制系统,突破了当今放疗的极限。通过超高剂量率、高速高分辨率、高精度多叶光栅和精准清晰的影像引导解决方案的有机结合,可以有效缩短治疗时间,提高治疗效率,将肿瘤放疗技术带入一个全新的时代。作为医科达公司新一代一体化智能放疗系统,Elekta INFINITY 在SRS/SBRT 方面显示出了杰出的优势。医科达INFINITY 加速器实现高效率治疗的一个条件是旋转机架系统的稳定运转。
医科达INFINITY 加速器采用的是双电机驱动模式。整个驱动系统分为电路控制部分、电机驱动部分和电位器读数反馈部分。下面分别从这3 个部分一一简析机架旋转系统。
1 电路控制部分
主机柜软件中的item148 GANT CTRL 参数发出机架旋转指令,这一指令被分成两个指令,一个由item540 GANT SPEED 传输速度参数,另一个由item579 GANT EN传输使能参数。速度参数经过72 区AO08 电路板将数字信号转换成模拟电压信号,送至EIM 柜子的两个机架驱动板。使能参数又分成两路,一路经72 区ROC 板子,送至72 区HME 电路板的RLB 继电器,随后再送至EIM 柜子的机架驱动板;另一路送至72 区ROC 板子的RLB1 继电器,使得继电器动作,这样从EIM 柜子过来的26V 就能经过72 区的HME 板子的RLB 继电器,然后给机架驱动电机上的刹车供电,从而使得刹车释放。只有在速度信号、使能信号同时存在,并且刹车释放的情况下,两个机架驱动板才能驱动机架电机正常旋转。在这一部分,容易出故障的是HME(hardware movement board)板子,HME 板子上的RLB 继电器,由于机架每次旋转都需要吸合释放一次,久而久之,导致继电器无法正常吸合释放,从而使能信号无法送至机架驱动板,或者刹车释放信号无法正常送至刹车。如果HME 板子有故障,表现形式为机架无法旋转,但没有任何报错信息。对于这一故障,如果有HME 备板,可以直接替换来排查。如果没有备板,可以尝试手动松电机的刹车,然后操作手控器旋转机架,如果此时机架可以旋转,则证明确实是HME 板子故障。
2 电机驱动部分
医科达INFINITY 直线加速器采用双电机,双齿轮箱驱动模式。当齿轮箱的刹车释放后,电机就可以在机架驱动板的作用下,驱动gantry 鼓轮旋转。安装电机时,需要保证两个电机的驱动皮带同步。当一个电机有故障时,另一个电机一开始可以带动机架旋转,但只一个电机工作的话,负担比较重,会大大缩短好的电机的使用寿命。一开始,只有一个电机有故障的时候,很难发现;所以等到机架旋转有问题的时候,基本上需要两个电机一起更换。对于INFINITY 直线加速器,电机故障,一般表现为在做VMAT 治疗时,机架旋转速度比较慢,跟不上束流的速度,于是报错“GANTRY STOP”故障。当机架旋转速度变慢的时候,可以用这种方法来判断是否由电机故障引起。将电机皮带松脱,操作手控器旋转机架,看电机自身旋转情况,往往有故障的电机,不带负载时,旋转都时转时停。此时,可以拆开电机进一步做判断,检查电机内部线圈以及碳刷损耗情况。如图1,用小一字螺丝刀对准电机的中间的缝隙中,用大一点内六角轻轻凿几下,让螺丝刀从缝隙中戳进去。如图2,再拿一个大一点的螺丝刀在裂开的缝隙中戳进去。如图3,可以用两只手拨开,因为一边是磁铁一边是线圈,没有螺丝。如图4,四个红圈中是碳刷对应的几个点,仔细看可以发现是有些磨损的。

图1 小一字螺丝刀电机拆卸

图2 大一点的螺丝刀电机拆卸
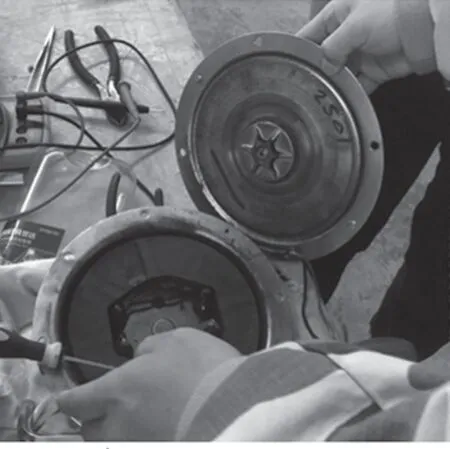
图3 电机拨开示意图
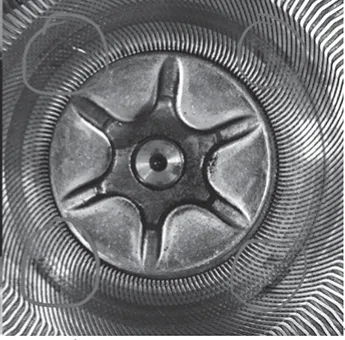
图4 四个碳刷对应点
3 电位器读数反馈部分
医科达INFINITY 直线加速器采用的是三电位器反馈系统,3 个电位器分别为coarse(20K,10T 黑色电位器)、fine(20K,1T 蓝色电位器)和check(20K,10T黑色电位器),3 个电位器的组合,保证了机架角度精确到0.01 度。当电位器有故障时,旋转机架,加速器会报错GANTRY 联锁。当无法简单区分哪个电位器有故障时,可以借助INFINITY 软件系统的强大的Service Graphing 功能来判断。电位器更换时,一般将机架旋转至实际0 度,黑色电位器设置在5V,蓝色电位器可设置在任意位置。更换完相应的电位器后,需要学习和定标,相关步骤如下。
学习步骤:
(1)Log on to Service Mode.
(2)Make sure that the digital accelerator is in the Preparatory machine state.
(3)Make sure that the treatment table is in the interlock group 3.
(4)Click Display Service Pages.
(5)Load the Calibration service page.
(6)Type 148 in Cal.item 1.
(7)Set Cal Man/Auto to 0 (manual).
(8)Use the GANTRY thumbwheel and move the gantry to -180 ±1°.
(9)Make sure that Cal.item 1 text box is empty.
(10)Click the Service Functions button.
(11)Click the Service Graphing button.
(12)Click the Files tab.
(13)In the Manage Configuration window,click Triple Pot Gantry.
(14)Click Load.
(15)Click the Graph tab.
(16)Click Edit Machine Item Parts and record the values of Item 540 Part 19 and Part 20,and Item 560 Part 135.
(17)Decrease the rotational speed of the gantry.
a. Set itemItem 540 Part 19 to +30.
b. Set Item 540 Part 20 to -30.
(18)Type 70 in Cal.item 1.
(19)Set Learn Enable to 1.
(20)In the Service Graphing window,click Begin Acquire.
(21)Use the GANTRY thumbwheel to move the gantry in a positive direction to +180 ±1°.
(22)Click Edit Machine Item Parts to get the value of Item 560 Part 135. It can be up to 30 seconds before the value is valid. ‘2’shows calibration is successful.
(23)Click End Acquire.
(24)Click the Files tab.
(25)In the Save/Load Data area, in the Filename box, type the service graph filename as Triple Pot Gantry.
(26)Click Save.
(27)If necessary, set Learn Enable to 0.
(28)Delete the values from the Cal.item 1 text box.※
(29)Click Save icon.
(30)Set Item 540 Part 19 and Part 20 to the values recorded in step 16.
(31)Set item 148 to Auto 1.
(32)Select Save LINAC Calibration.
定标步骤:
(1)Select i148 and set Cal Man/Auto to 0(manual).
(2)Enter i70 into Cal. item 1.
(3)Using a spirit level, set the gantry angle to 90±0.5°.
(4)Enter the value +9000 into Cal. value.
(5)Using a spirit level, set the gantry angle to -90±0.5°.
(6)Enter the value -9000 into Cal. value.
(7)Click the Save icon.
(8)Select Save LINAC Calibration to finish the calibration. This cross-calibrates the servo stop item and sets the limits.
(9)Using a spirit level, move the gantry to 0±0.5°.
(10)Verify that the value of i70 is 0±1°.
(11)Verify that the value of i148 is 0±0.5°.
INFINITY 加速器更换完电位器后的附加操作:
INFINITY 加速器带XVI 系统,XVI 运行CT 扫描的时候,需要和加速器通讯,读取加速器旋转机架的角度。因此,更换完机架电位器后,需要将旋转机架的相应参数告知XVI 软件。
XVI电脑的桌面中打开DCB utility软件,在“gantry angle calibration setting”中输入相应的加速器item70 的参数,点击保存即可。
猜你喜欢
课程教育研究(2021年24期)2021-04-14
——读《板子猴》有感
学生阅读世界(喜欢写作文)(2020年10期)2020-12-29
World Journal of Hepatology(2019年5期)2019-06-20
党建文汇·上(2016年10期)2017-01-06
中国信息技术教育(2016年23期)2017-01-03
中国经济周刊(2016年31期)2016-08-10
上海管理科学(2015年4期)2015-07-31
阜阳职业技术学院学报(2015年4期)2015-05-17
机械工程师(2014年4期)2014-07-01
中国医疗设备(2013年7期)2013-11-19