基于无人驾驶电动拖拉机的自适应跟踪算法研究
2023-12-11 22:31:20吴正开王家忠郉雅周弋景刚李珊珊赵春明
中国农机化学报 2023年11期
关键词:无人驾驶
吴正开 王家忠 郉雅周 弋景刚 李珊珊 赵春明

摘要:純跟踪算法和斯坦利算法均属于对车辆前轮转角进行控制的几何跟踪方法,具有简单、直接、控制参数少、容易实现等特点。无人驾驶拖拉机作业时,由于农田作业影响因素众多,路径跟踪往往达不到理想效果,因此,根据纯跟踪算法和斯坦利算法各自特点,搭建权重分配的策略模型,提出一种自适应跟踪算法。通过优化权重参数,得出最优权重值,并在不同土壤环境、不同速度以及不同重心位置条件下,进行对比仿真试验。仿真试验表明,自适应算法应对不同作业工况时具有更好的纠偏能力。采用千寻基站将定位信号发送给车载组合导航接收机,获得整机的精准定位信息,将试验地块坐标录入到导航系统中,利用工控机规划出合理的作业路径,进行田间试验。田间试验表明,采用自适应算法,播种作业时横向偏差均值为0.03 m,地头转向时横向偏差为0.11 m,22行作业横向偏差均值均在0.05 m之内,满足作业精度要求。
关键词:无人驾驶;电动拖拉机;路径跟踪;自适应模型;权重策略
中图分类号:S219.4文献标识码:A文章编号:20955553 (2023) 11017608
Research on adaptive tracking algorithm based on driverless electric tractor
Wu Zhengkai Wang Jiazhong Xing Yazhou Yi Jinggang Li Shanshan Zhao Chunming
(1. College of Mechanical and Electrical Engineering, Agricultural University of Hebei, Baoding, 071001, China;
2. Hebei Intelligent Agricultural Equipment Technology Innovation Center, Baoding, 071001, China;
3. Tianjin Yidingfeng Power Technology Co., Ltd., Tianjin, 300380, China)
Abstract:Both pure tracking algorithm and Stanley algorithm are geometric tracking methods based on the control of vehicle front wheel angle, which are simple, direct, less control parameters and easy to implement, and are widely used. However, in the operation of unmanned tractor, the path tracking often fails to achieve the ideal effect due to the many influencing factors of farmland operation. In this paper, according to the characteristics of pure tracking algorithm and Stanley algorithm, an adaptive tracking algorithm is proposed, and the control model of the adaptive tracking algorithm is built. Through simulation analysis and optimization of the weight parameters, the optimal weight strategy is obtained. Comparative simulation tests were carried out under different soil environments, different velocities and different positions of the center of gravity. The simulation results show that the adaptive algorithm can realize the adaptive control under different working conditions. The positioning signal was sent to the vehicle integrated navigation receiver by the Chihiro base station, and the precise positioning information of the whole machine was obtained. The coordinates of the test plot were input into the navigation system, and the industrial computer was used to plan a reasonable operation path for the field experiment. The field experiments show that the adaptive algorithm can achieve the mean lateral deviation of 0.03 m in sowing operation and 0.11 m in field head turning. The mean lateral deviation of 22 rows of operations is within 0.05 m, which meets the requirements of operation accuracy.
Keywords:driverless; electric tractor; path tracking; adaptive model; weight strategy
0引言
随着北斗导航技术的不断发展,无人驾驶电动拖拉机技术日益成熟,其作业精度是路径规划算法和路径跟踪方法综合作用的结果。调研发现,小麦玉米联作和麻山药种植对农艺要求较高,在土壤特性复杂多变的农田环境下,由于受拖拉机自身结构、悬挂的刚性和农机具负载变化等许多不确定性因素干扰,给无人驾驶电动拖拉机路径精确跟踪带来极大困难。目前无人驾驶电动拖拉机常见的路径跟踪方法,难以满足播种精度要求。因此,研究适合无人驾驶电动拖拉机的自适应路径跟踪方法成为迫切需求。
几何跟踪算法是通过对车辆前轮转角的控制,从而减小横向偏差,具有简单、直观、便于实现的特点。目前,几何跟踪算法主要有纯跟踪算法(Pure Pursuit)和斯坦利算法(Stanley)。其中,纯跟踪算法使用了几何车辆模型的转向控制法则,对大误差和不连续路径鲁棒性较好;缺点是在中高速时跟踪效果不佳,且需要选取合适的预瞄距离[1]。李革等[1]采用动态调整前视距离的方式改进纯跟综算法,应用于水田作业,该算法最大跟踪偏差可控制在0.159 m内;李逃昌等[2]采用模糊自适应方法改进纯跟踪模型,该算法能够自适应地确定预瞄距离,试验测试其路径跟踪平均偏差小于5 cm。
相比于纯跟踪算法,斯坦利跟踪算法的控制效果更侧重于控制增益,而规律性尚且不足,其优点是路径的参考点避免和前视距离相关联,直接将前轮转角补偿为横向偏差和航向角偏差[3]。因此,直线跟踪更精确,其缺点是需要调节合适控制增益来达到理想的路径跟踪效果,该算法由斯坦福大学针对汽车路径跟踪问题提出[4],但拖拉机整机结构与汽车差异较大,因此需要设计一种适应电动拖拉机的算法。
由于无人驾驶作业机组在大田作业时,存在土壤环境复杂、农机具负载变化等问题,现有的路径跟踪方法已不能满足无人驾驶电动拖拉机的作业需求。因此,本文面向智慧农业的需要,设计一种自适应路径跟踪控制模型,并通過MATLAB/Simulink仿真和田间试验结合的方法,验证该算法的可行性。
1电动拖拉机作业机组的结构分析
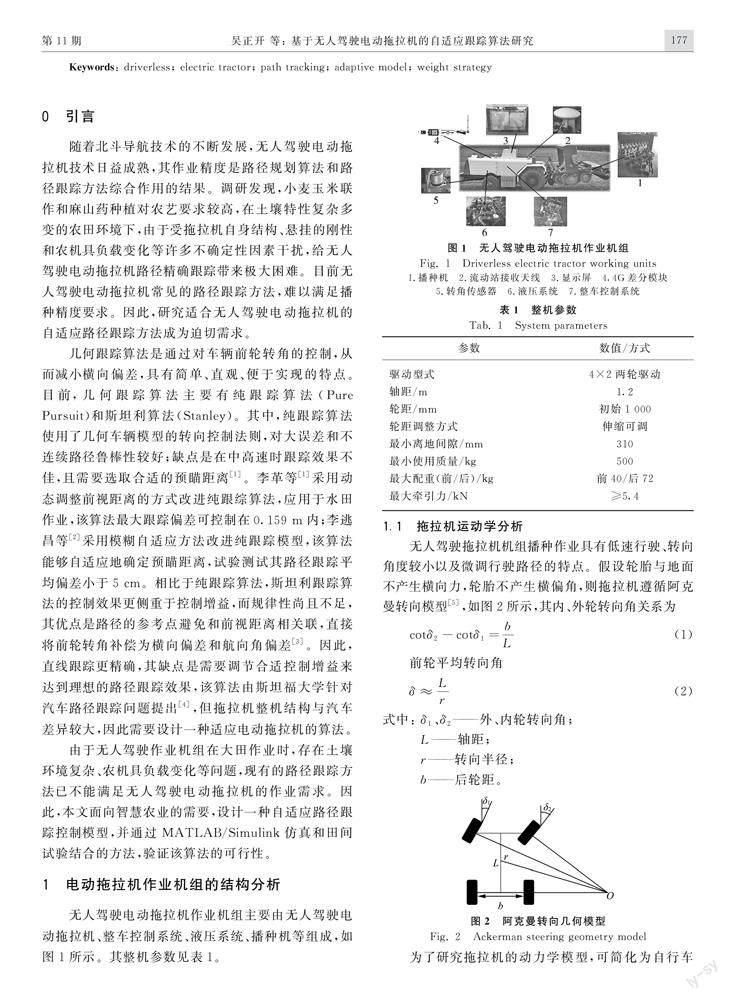
无人驾驶电动拖拉机作业机组主要由无人驾驶电动拖拉机、整车控制系统、液压系统、播种机等组成,如图1所示。其整机参数见表1。
1.1拖拉机运动学分析
无人驾驶拖拉机机组播种作业具有低速行驶、转向角度较小以及微调行驶路径的特点。假设轮胎与地面不产生横向力,轮胎不产生横偏角,则拖拉机遵循阿克曼转向模型[5],如图2所示,其内、外轮转向角关系为
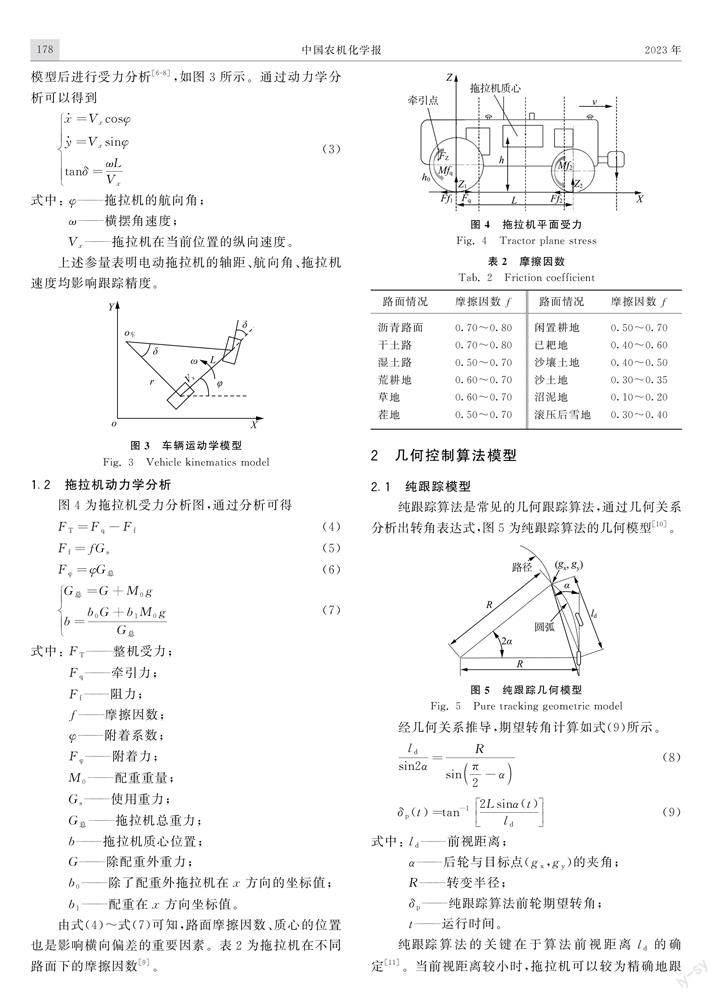
1.2拖拉机动力学分析
由式(4)~式(7)可知,路面摩擦因数、质心的位置也是影响横向偏差的重要因素。表2为拖拉机在不同路面下的摩擦因数[9]。
2几何控制算法模型
2.1纯跟踪模型
纯跟踪算法是常见的几何跟踪算法,通过几何关系分析出转角表达式,图5为纯跟踪算法的几何模型[10]。
2.2斯坦利跟踪模型
2.3自适应模型
农田环境复杂多变,拖拉机具有在直线行驶时进行作业,在转向时抬起农机具停止作业的特点,因此,播种作业要求拖拉机在直线作业时需要更好的直线跟踪能力;在转向时有更好转向的适应能力。斯坦利方法能有效应对直线行驶时,复杂农田环境对整机行驶造成的颠簸、打滑所产生的行驶偏移[14]。农田作业空间有限,地头转向区域较小,造成转向路径较为复杂[1516],因此采用纯追踪方法确保较好的转向性能。图7为预设路径及选取路段,在设置仿真条件时,土壤条件为沙土;拖拉机参数设置:车速为1.3 m/s、机具重心位置距前轴为0.5 m,可得到纯跟踪算法和斯坦利算法的Simulink仿真对比结果如图8、图9所示。图中每隔0.20 m取一个路径点分别选取直线、曲线段50个路径点拟合曲线进行分析。拖拉机在田间作业时,直线作业时斯坦利算法作业直线度较精确,转向时纯跟踪算法较精确。
因此,本文结合两种算法的优势,将两种算法的期望转角加权处理,提出一种自适应跟踪模型,能够应对电动拖拉机在田间作业时的各种复杂工况。
本文采用的自适应跟踪方法原理如图10所示。
结合两种路径跟踪的特点搭建自适应路径跟踪模型,保留原拖拉机动力学模型情况下,加入权重策略模型,最终得到自适应路径跟踪仿真模型,如图11所示。
选取前视距离下连续的3个路径点,计算路径点间角度变化情况从而判断行驶状况,通过加权的方式将纯跟踪方法与斯坦利方法相结合,可得
经过仿真得到自适应跟踪算法权重k在不同时刻的变化趋势,如图12所示。通过MATLAB中ga求解器[17]对权重k进行优化。
利用搭建好的模型,在车速1.3m/s、沙土地面以及重心位置距前轴0.5m的工况下,三种算法跟踪精度如图14所示。仿真结果表明,自适应模型在田间作业时跟踪效果较好。
3仿真分析
3.1电动拖拉机速度对横向误偏的影响
同一台电动拖拉机,模拟沙土地田间作业,不同跟踪速度下三种跟踪算法的横向偏差如图15所示。
车速对跟踪算法的跟踪偏差具有影响。三种算法均在速度为1.3 m/s作业时表现较好,作业速度为1.5 m/s时横向偏差波动最大。作业速度1.3 m/s时,纯跟踪算法的平均偏差绝对值在0.025 m左右,斯坦利算法的平均偏差绝对值在0.020 m左右,自适应算法的平均偏差绝对值在0.007 m左右,由此验证了自适应模型更能适应不同速度下电动拖拉机作业环境。
3.2土壤类型对横向偏差的影响
设定车速为1.3 m/s时,三種跟踪模型在沙土地(μ=0.4)、壤土地(μ=0.6)的直线段下跟踪效果见图16。
三种算法在壤土地工况下的跟踪效果不如沙土地,自适应模型更能保证各种土壤类型下的直线度要求。
3.3重心位置对横向偏差的影响
设定车速为1.3 m/s时,三种跟踪模型在壤土地工况下跟踪,不同重心位置下跟踪效果如图17所示,图中a为车辆重心距离前轴的位置。
可见,重心位置参数对拖拉机跟踪作业的影响较大,3种算法在不同重心位置下作业精度不同,拖拉机重心位置在0.5 m时跟踪效果较好,并且纵向比较三种算法,自适应模型具有一定自调节能力。
4田间试验
为验证自适应路径跟踪算法的有效性,进行了田间试验。试验在河北省辛集市马庄乡保高丰农场进行。选择了长度和宽度分别约为90 m和30 m的地块进行播种作业试验,跟踪效果如图18所示。
作业前,将作业区块信息录入到导航系统中[1820],采用千寻基站将定位信号经差分后通过通信模块发送给车载组合导航接收机,获得定位信息,在确定起始作业路径点后,遥控拖拉机行驶到地块各端点记录定位信息,将地块大小与形状等信息录入到导航系统中,进行路径规划,并输入路径开始跟踪。由于土地较小,采用密行播种农艺,其路径采用跨行播种,共22行。田间试验效果如图19所示,跟踪横向偏差效果如表3所示。
试验结果表明,电动拖拉机直线作业时最大偏差不超过0.05 m,平均偏差为0.03 m;转向时平均偏差为0.11 m,自适应模型具有良好的跟踪精度。
5结论
1) 由于无人驾驶电动拖拉机播种机组低速作业、转弯半径大、对作业直线度要求高的特点,本文搭建纯跟踪算法和斯坦利算法的田间作业跟踪模型,进行仿真对比,得出纯跟踪算法更具有转向适应性,斯坦利算法更具有跟踪精确性的结论。
2) 在两种算法基础上,设计了权重分配策略以及转向策略模型,提出一种适合无人驾驶电动拖拉机的自适应跟踪算法,更适应拖拉机田间作业时的复杂工况。
3) 综合考虑土壤类型、电动拖拉机运行速度和重心位置的影响,采用单一变量方式,对比分析三种算法的跟踪效果,自适应算法模型能够适应更复杂的工况。
4) 采用本文提出的自适应跟踪模型进行田间试验,自主直线作业时平均偏差为0.03 m,转向时平均偏差为0.11 m,作业精度有较大的提升,满足作业要求。
参考文献
[1]李革, 王宇, 郭刘粉, 等. 插秧机导航路径跟踪改进纯追踪算法[J]. 农业机械学报, 2018, 49(5): 21-26.Li Ge, Wang Yu, Guo Liufen, et al. Improved pure pursuit algorithm for rice transplanter path tracking [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 21-26.
[2]李逃昌, 胡静涛, 高雷, 等. 基于模糊自适应纯追踪模型的农业机械路径跟踪方法[J]. 农业机械学报, 2013, 44(1): 205-210.Li Taochang, Hu Jingtao, Gao Lei, et al. Agricultural machine path tracking method based on fuzzy adaptive pure pursuit model [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 205-210.
[3]Snider J M. Automatic steering methods for autonomous automobile path tracking [J]. Robotics Institute, 2011.
[4]Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: The robot that won the DARPA Grand Challenge [J]. Journal of field Robotics, 2006, 23(9): 661-692.
[5]唐应时, 朱位宇, 朱彪, 等. 基于轮胎磨损的悬架与转向系统硬点优化[J]. 汽车工程, 2013, 35(7): 640-644, 653.Tang Yingshi, Zhu Weiyu, Zhu Biao, et al. Hard-points optimization of suspension and steering systems based on tire wear [J]. Journal of Automobile Engineering, 2013, 35(7): 640-644, 653.
[6]王启明, 毛作龙, 张栋林, 等. 基于轨迹预测与模型预测的换道路径跟踪控制[J]. 控制工程, 2023, 30(9): 1598-1605.Wang Qiming, Mao Zuolong, Zhang Donglin, et al. Lane changing path tracking control based on trajectory prediction and model prediction [J]. Control Engineering, 2023, 30(9): 1598-1605.
[7]孟宇, 汪钰, 顾青, 等. 基于预见位姿信息的铰接式车辆LQR-GA路径跟踪控制[J]. 农业机械学报, 2018, 49(6): 375-384.Meng Yu, Wang Yu, Gu Qing, et al. LQR-GA path tracking control for articulated vehicle based on predictive information [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 375-384.
[8]李逃昌, 胡静涛, 高雷, 等. 一種与行驶速度无关的农机路径跟踪方法[J]. 农业机械学报, 2014, 45(2): 59-65.Li Taochang, Hu Jingtao, Gao Lei, et al. Agricultural machine path tracking method irrelevant to travel speeds [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2): 59-65.
[9]余志生. 汽车理论(第5版)[M]. 北京: 机械工业出版社, 2009.
[10]王亮, 陈齐平, 罗玉峰, 等. 基于“Pure Pursuit”自动驾驶汽车的路径跟踪控制[J]. 汽车零部件, 2021(8): 1-7.Wang Liang, ChenQiping, Luo Yufeng, et al. Track-tracking controls of autonomous vehicle based on pure pursuit [J]. Auto parts, 2021(8): 1-7.
[11]韩科立, 朱忠祥, 毛恩荣, 等. 基于最优控制的导航拖拉机速度与航向联合控制方法[J]. 农业机械学报, 2013, 44(2): 165-170.Han Keli, Zhu Zhongxiang, Mao Enrong, et al. Joint control method of speed and heading of navigation tractor based on optimal control [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 165-170.
[12]Zhang Q, Qiu H. A dynamic path search algorithm for tractor automatic navigation [J].Transactions of the ASAE, 2004, 47(2): 639-646.
[13]Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: The robot that won the DARPA grand challenge [J]. Journal of Field Robotics, 2006, 23(9):661-692.
[14]Kumar A A, Tewari V K. Analysis of suitable of traction model for sandy clay loam soils on farm use of tractor [J]. Journal of Agriculture and Food Research, 2021, 5(14): 100180.
[15]Samson C. Control of chained systems application to path following and time-varying point-stabilization of mobile robots[J]. IEEE Transactions on Automatic Control, 1995, 40(1): 64-77.
[16]张硕, 吴雨洋, 崔星, 等. 一种车辆横向自适应控制方法[P]. 中国专利: CN113815602A, 2021-12-21.
[17]赵思夏, 刘孟楠, 徐立友. 电动拖拉机底盘多目标优化设计[J]. 农业机械学报, 2018, 49(S1): 492-498.Zhao Sixia, Liu Mengnan, Xu Liyou. Optimization design of electric tractor chassis based on multiple performance objectives [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 492-498.
[18]Qiu Hongchu. Navigation control for autonomous tractor guidance [M]. IIIinois, USA: University of IIIinois at Urbana-Champaign, 2002.
[19]罗锡文, 张智刚, 赵祚喜, 等. 东方红X-804拖拉机的DGPS自动导航控制系统[J]. 农业工程学报, 2009, 25(11): 139-145.Luo Xiwen, Zhang Zhigang, Zhao Zuoxi et al. Design of DGPS navigation control system for Dongfanghong X-804 tractor [J]. Transactions of the Chinese Society of Agricultural Engineering, 2009, 25(11): 139-145.
[20]翟卫欣, 王东旭, 陈智博, 等. 无人驾驶农机自主作业路径规划方法[J]. 农业工程学报, 2021, 37(16): 1-7.Zhai Weixin, Wang Dongxu, Chen Zhibo, et al. Autonomous operation path planning method for unmanned agricultural machinery [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(16): 1-7.
猜你喜欢
控制与信息技术(2022年5期)2022-11-19 08:33:52
作文小学中年级(2022年9期)2022-09-08 06:13:30
中国特种设备安全(2021年11期)2021-05-05 06:13:28
科学(2020年3期)2020-11-26 08:18:28
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
专用汽车(2018年10期)2018-11-02 05:32:26
空中之家(2017年11期)2017-11-28 05:28:21
汉语世界(2017年5期)2017-09-21 07:44:38
科学大众(中学)(2017年3期)2017-07-06 18:38:29
百科探秘·航空航天(2016年12期)2017-01-15 13:33:04