
多因素空间近距离巡查效能评估建模
2023-12-08 08:38周剑勇侯志璞
国防科技大学学报 2023年6期
周剑勇,侯志璞
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073; 2. 空天任务智能规划与仿真湖南省重点实验室, 湖南 长沙 410073;3. 西北核技术研究所, 陕西 西安 710024)
随着空间技术的日益发展和深入应用,目标抓取、故障修复等面向在轨服务和空间对抗的近距离操控需求越发强烈。通过光学手段对空间目标进行巡查观测,以便查证目标类型、识别目标状态、定位目标故障等,是实施后续相关空间任务的基础。效能评估可以量化评价巡查观测任务的完成度和完成效率,支撑巡查任务的优化设计,提升巡查航天器的任务能力。
当前,国内外对近距离光学观测的观测条件、敏感器硬件优化、观测图像的识别与评价等研究较多。陈阳、Net等分别分析了地球遮挡约束、地影约束、太阳光干扰约束等空间目标可见性模型[1-2]。王久龙等对地球同步空间态势感知计划(geosynchronous space situational awareness program, GSSAP)卫星的近距离巡查成像过程进行了仿真分析,并发现:高轨目标观测时,需要综合考虑观测距离、太阳光照和观测角度以获得较好的成像结果[3]。Zhao等对低地球轨道和亚同步转移轨道天基光学观测系统的空间碎片探测能力进行了模拟分析[4]。Wang等采用基于遥感图像的像移测量方法,研究了通过配准算法得到相邻帧间的位移量进而获取高质量观测图像的问题[5]。Sheikh等提出了基于信息论的图像质量评价方法[6]。张颖等对影响探测距离的因素进行分析,建立了系统极限探测距离的数学模型[7]。李玲琳开展了与主观视觉相关的遥感图像质量评价研究,提出了一种遥感图像清晰度质量评价方法[8]。鲁敏分析了遥感图像质量表征参数,并通过主成分分析得到遥感图像质量的综合表征和评价方法[9]。
这些研究成果可以提高巡查航天器获取和识别目标离散状态图像的能力,有助于得到目标的高质量观测图像,但是难以评价整个观测任务的达成度和效率。比如同样是对目标的10 min高质量成像观测,单个固定方向的观测和绕目标飞行观测的任务达成度可能差异较大。对此,国内外研究较少,没有公开文献阐述过考虑多因素的效能综合评估模型,主要原因应是巡查任务涉及的因素多,综合评估模型较为复杂,且验证实验比较难。
本文面向巡查任务全过程,考虑了太阳光约束、观测相机性能约束等典型约束,建立了近距离巡查观测的相对距离、像移、有效观测时间、目标观测角度等因素的巡查任务综合效能量化评估模型,提供了一种新的面向任务过程评价有效评估方法。
1 空间巡查任务分析
根据巡查时平台与目标的相对运动关系,空间巡查总体上可分为掠飞巡查和绕飞巡查两类。
1.1 掠飞巡查
掠飞巡查是指巡查航天器从目标航天器近旁掠飞经过并完成巡查任务,如图1(a)所示。主要用于对空间目标的初步筛查和识别,其优点是可通过合理地设计掠飞轨迹,消耗较少的机动能量,使得巡查航天器具有较长的工作寿命和完成较多目标巡查的能力,比如GSSAP卫星对空间目标的抵近侦察,主要采用的就是掠飞巡查方式。
1.2 绕飞巡查
绕飞巡查是指巡查航天器围绕目标航天器做绕飞飞行并完成巡查任务,如图1(b)所示。其特点是对目标的观测时间较长、观测角度较全面,可用于对空间目标的详查和识别。但绕飞巡查通常需要消耗更多的机动能量,以便使巡查航天器进入、维持和转出相应的绕飞轨道。
不论何种巡查方式,均要满足相应的观测条件,并以尽可能小的成本达成最大的巡查效益。比如相同机动成本和观测图像质量时,对目标的观测时间和观测角度尽可能大。
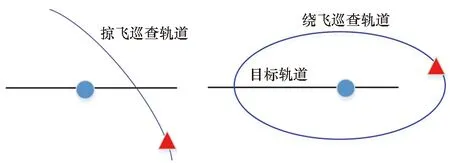
(a) 掠飞巡查(a) Flying patrol
2 空间巡查效能评估建模
2.1 问题界定
考虑到巡查航天器的质量和尺寸限制,当前的巡查航天器一般需要接近目标约10 km范围,才能开展有效的光学观测并获取目标的清晰图像。根据俄罗斯科学院ISON空间监测网络数据显示,2016年至2020年,GSSAP卫星对俄罗斯、中国、巴基斯坦等国卫星的9次近距离巡查,相对距离均在10~15 km[10]。
因此,本文的巡查效能评估,界定为巡查航天器在相距目标约10 km范围内巡查过程的效能评估,对目标的远距离接近过程不纳入评估范围。
2.2 约束建模
基于上述问题界定,近距离巡查的光学观测主要考虑地影约束、阳光角约束和相对角速度约束,且考虑地影约束时,巡查航天器可以近似看作与目标航天器位置重合。
2.2.1 地影约束模型
2.2.2 阳光角约束模型
天基光学观测需要确保太阳光不直射入相机视场,即太阳的视半径及其光散射角之和不在相机视场内,如图2所示。

图2 阳光角约束Fig.2 Sunlight angle constraint


(1)
用矢量表示为:
(2)
2.2.3 观测角速度约束模型
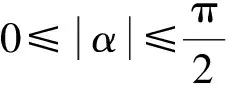
受限于光学敏感器的性能,巡查航天器观测目标航天器的角速度不能过大,否则会因为相机成像单元积分时间不够而导致敏感器无法捕捉到目标。
设巡查航天器敏感器所能识别目标的最大角速度大小为ωmax,目标相对于巡查航天器速度为vr,速度矢量与目标相对位置矢量rpe之间夹角为γ,观测角速度大小为ω,如图3所示。
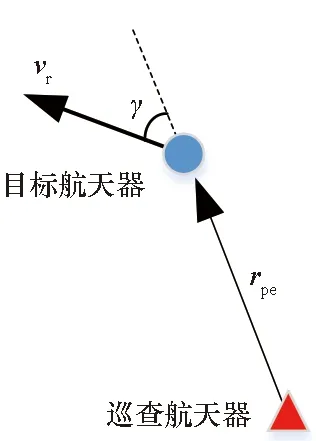
图3 相对角速度约束Fig.3 Relative angular velocity constraint
由速度关系得:
vrsinγ=ω|rpe
(3)
根据vr和rpe矢量关系
(4)
由式(3)和式(4)可得:
(5)
则观测角速度约束为:
(6)
ωmax与观测相机的曝光时间、像元大小等有关,主要由观测相机的硬件决定。
2.3 效能评估建模
2.3.1 效能评估模型总体框架
巡查任务的综合效能评估整体上可分为两个层次:一是巡查过程中各点的单点观测效果,代表了目标是否“看得清”;二是任务过程的整体观测程度,代表了目标是否“看得全”“看得好”,评估模型框架如图4所示。

图4 巡查任务综合评估框架Fig.4 Comprehensive evaluation framework for patrol tasks
其中,基于相对距离评估模型、像移评估模型构建巡查任务中不同位置的局部观测效能评估模型。再根据具体巡查任务,获得基于局部效能评估并结合巡查任务整体过程观测时间、观测覆盖角度等的全任务综合效能评估模型。
2.3.2 相对距离评估模型
目标航天器在观测图形中的大小直接影响光学观测效果,而成像大小主要由观测敏感器性能及目标航天器相对距离决定。记f为巡查相机焦距,H为目标航天器相对距离,d、b分别为CCD相机靶面的高和宽,如图5所示。
图5 CCD相机成像原理Fig.5 Principles of CCD camera imaging
当镜头与目标航天器距离为H时,相机所能测量的最大高度D、最大宽度B分别为:
(7)
则单位像长对应的实际长度μ为:
(8)
每个像素对应的实际宽度βb、实际高度βd分别为:
(9)
其中,kb·kd为像元大小。
因此,距离越近,目标成像越大。但是距离过近,则不能获得目标的完整图像,也不符合观测要求。当目标航天器布满整个像元时,观测效果最好。为简化讨论,假设目标为L×L×L的立方体卫星,巡查相机的像面为正方形,即b=d=l,则目标航天器布满整个像元时
(10)
(11)
2.3.3 像移评估模型
巡查过程中,巡查航天器与目标航天器通常会有相对运动,而光学成像又需要一定时间的曝光,在观测相机曝光过程中,影像与感光之间必然会有相对运动,导致目标的像点在相机像面上会发生位移,即像移。像移会导致影像模糊,降低成像质量。当两航天器无相对运动时,最有利于成像。
设目标航天器相对巡查航天器的速度大小为vr,两次拍摄时图像在像面上的像移速度大小为vm,则
(12)
由此可得:
(13)
则曝光时间内的像移量δ为:
(14)
对于相同的像移量,目标在像面上的大小不同,表现出的模糊程度也不同,可用像移量与目标在像面上的尺寸之比来表征图像的模糊程度δm,即
(15)
将式(10)、式(14)代入式(15)得
(16)
当模糊指标δm超过最大值δmmax时,观测图像不清晰,观测效能记零分。建立像移评价模型,评估得分mid为:
(17)
2.3.4 有效观测时间评估模型
为了获得目标航天器的足够信息,在约束允许的情况下,通常希望对目标的有效观测时间足够长。假设巡查航天器以等时间间隔对目标进行观测拍照,则有效观测时间可以用巡查任务中获得的有效照片数N来表征。但是,有效观测时间具有边际效应,当有效时间达到一定程度时,任务观测效能将基本不会再增加。建立有效观测时间评估模型,评估得分mt为:
(18)
2.3.5 目标观测角度评估模型
为了全方位获得目标信息,要求巡查航天器尽可能对目标航天器进行全周向观测。以目标航天器为中心,沿周向切分成若干块(比如32块)等角度扇形区域,巡查航天器有效观测覆盖的区域越多,观测越全面。同时,定义观测均匀度指标,用来衡量巡查航天器在不同观测区域时,对目标的有效观测程度差异。在每个区域内,巡查航天器拍摄的照片数量相等,则说明观测足够均匀,对目标各角度的观测一致性最好。
(19)
(20)
(21)
(22)
(23)

(24)
获得有效照片分布越均匀,Eθ值越小。建立目标观测角度评估模型,评估得分me为:
(25)
2.3.6 观测效果综合评估模型
基于以上建模,巡查过程中的单点观测效能评估模型为:
m=C·md·mid×100
(26)
式中,C为约束满足系数,目标满足观测约束时,C=1,否则C=0。
进一步纳入有效观测时间和目标观测角度的任务过程量评估结果后,统计所有可观测位置点的评估结果,得到巡查任务整体的综合效能评估模型:
(27)
式中,mi为巡查过程中各单点的评估结果。
3 仿真验证与分析
3.1 算例配置
双椭圆受控绕飞由两个自然绕飞椭圆拼接而成,具有自然椭圆绕飞观测的诸多优点,是实际绕飞巡查任务中常用的飞行方式,如图6所示。两个自然绕飞椭圆关于x轴对称,巡查航天器分别在A、B两点施加机动脉冲,以完成双椭圆绕飞巡查。

图6 双椭圆受控绕飞轨迹Fig.6 Controlled double elliptical orbit
任务初始时刻,设目标航天器在距地面400 km高度的圆轨道上,巡查航天器在其附近绕飞。绕飞周期为720 s,相机每隔5 s拍一张照片。在目标器轨道坐标系下,两航天器初始相对状态见表1。

表1 两航天器的初始相对状态
3.2 算例结果分析
3.2.1 约束情况分析
考虑前述的太阳光约束、观测角速度约束等,在一个绕飞周期内,目标的可观测情况如图7所示,其总有效观测窗口时长约为600 s。

图7 一个周期内的约束满足情况Fig.7 Constraint satisfaction within one period
3.2.2 效能评估分析
根据式(11)、式(17),可分别得到任务过程中,相对距离评估模型和像移评估模型的效能得分随任务时间变化情况,如图8(a)和图8(b)所示。图8(c)给出了任务过程中单点观测效能的评估得分随时间的变化。
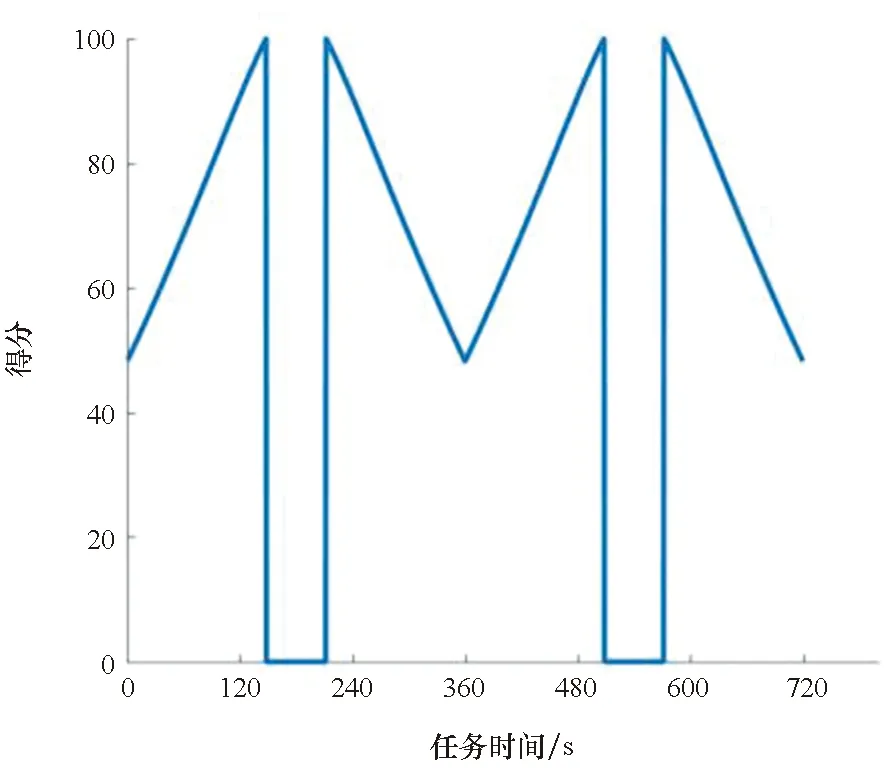
(a) 相对距离评估模型得分(a) Relative distance evaluation model scores

(b) 像移评估模型得分(b) Image motion evaluation model scores
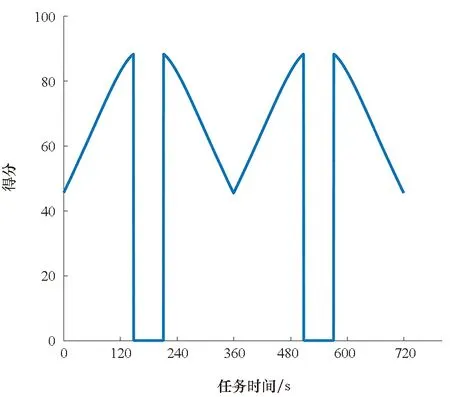
(c) 单点观测评估得分(c) Single point observation evaluation scores图8 效能评估结果Fig.8 Efficiency evaluation results
由图8可以看出,满足基本约束条件后,相对距离评估模型的观测效能得分在50~100之间,差别较大,说明相对距离对观测图形的质量影响较大。而像移评估模型得分在85~95之间,即相对速度影响不显著,这与算例配置的较低相对速度相符合。单点观测效能的综合得分在45~85之间,平均分为68,综合得分趋势与相对距离评估模型得分趋势基本吻合,说明本任务中,对单点观测效能影响较大的是相对距离因素。
本次任务中,根据设定的相机参数及光照约束条件,单个周期可获取118张目标观测图片,有效观测时间评估模型得分为100,说明可以获得足够多的目标图片。目标观测角度评估模型得分63,任务观测效能总得分67。这说明此次任务受相对距离影响,单点观测效果一般;受目标观测角度的影响,存在一部分不可观测区域,导致目标观测不够全面,巡查观测任务的整体效能一般。
3.3 半实物仿真验证
为了进一步检验所建立的效能评估模型的有效性,基于实验室的9自由度空间相对运动模拟平台,通过增加太阳光模拟器、观测相机、巡查航天器和目标航天器实物缩比模型等,设计和研制了近距离巡查光学观测半实物仿真系统,如图9所示。

图9 巡查效能评估半实物仿真系统Fig.9 Semi-physical simulation system for patrol efficiency evaluation
基于研制的半实物仿真系统,对3.1节配置的算例进行半实物仿真验证。仿真实验采用缩比实验设计。相对距离缩比因子取λs=400,实物模型缩比因子取λm=10。参照对国内外空间光学相机的调研结果,巡查相机选用搭载CMOS传感器的A5131CG75相机,镜头型号为MH0820S,像元尺寸为2.4 μm,曝光时间1 μs~1 s可调,视场角为47.9°×32.9°,畸变<0.1%,分辨率为1 280像素×1 024像素。
主要实验步骤包括:
Step1:设定实验场景,设计缩比因子,运动平台上电,启动半实物实验系统。
Step2:根据实验条件,设置两航天器初始状态参数、相机状态参数、模拟太阳光状态参数。
Step3:开始运行半实物仿真实验系统,按照预设轨迹模拟巡查相对运动,直至实验终止;实验系统不断获取平台测量信息与实验观测图像。
Step4:实验结束;重复Step 1至Step 3,开始下一组实验。
Step5:对实验结果进行分析,获得实验结论。
基于构建的效能评估模型,对选取的3个状态进行单点观测效能评估,得其评估得分,并对任务整体过程进行效能评估,结果见表2。
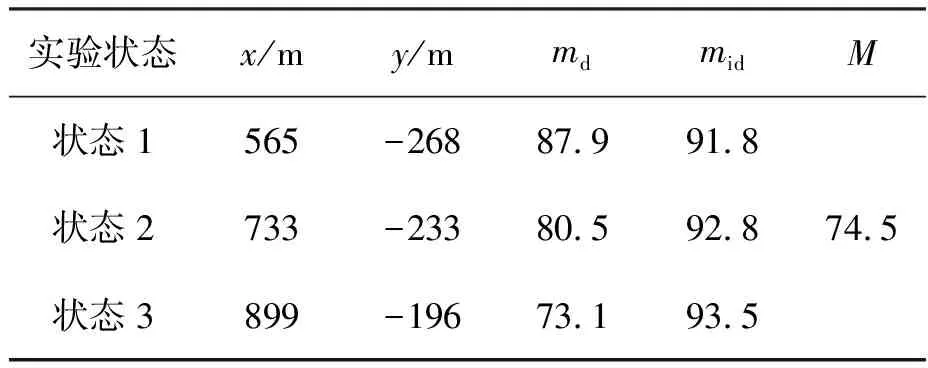
表2 部分状态及任务整体效能评估模型得分
从表中可以看出,各状态的相对距离评估得分md平均为80.5,像移评估得分mid平均为92.7,得分均较高;当前任务的整体效能为74.5,表明可以较好地完成目标巡查任务。模型评估结果既与相对速度较小的参数设定一致,也与半实物仿真系统的实际观测结果相吻合。
实验表明,任务的实际效果与评估模型结果较为符合,验证了巡查效能评估模型的有效性。
4 结论
本文研究了考虑光照条件约束等的空间近距离巡查观察效能评估问题,构建了一种新的基于巡查过程相对距离因素、像移因素等的单点效能评估模型,及基于任务全过程的有效观测时间、目标观测角度等综合效能评估模型,并通过数值算例分析和半实物仿真实验,对提出的评估模型进行了仿真验证。研究较好地解决了常见空间巡查观测研究中,没有考虑任务过程整体评估需求的问题,拓展了面向巡查任务完整过程的效能评估方法研究和应用,可以更好地支撑基于评估结果的巡查策略设计和巡查轨迹优化等。
猜你喜欢
国际太空(2022年7期)2022-08-16
加油站服务指南(2021年4期)2021-07-21
数学年刊A辑(中文版)(2020年1期)2020-05-19
国际太空(2019年9期)2019-10-23
中国交通信息化(2019年1期)2019-03-26
国际太空(2018年12期)2019-01-28
中国环境监察(2018年10期)2018-11-14
国际太空(2018年9期)2018-10-18
安全生产与监督(2016年10期)2016-08-15
中国水利(2015年10期)2015-02-28
