城市河湖罩吸清淤船清淤施工工法
2023-12-06 02:17张关超刘存辉
中国水能及电气化 2023年11期
张关超 刘存辉 王 茵
(北京河沐生态科技有限公司,北京 102206)
1 概 述
传统的河湖淤泥疏挖大多采用围堰抽水,挖掘机、自卸汽车运输,弃料场地自然堆放。传统的清淤方式造成了水资源与土地资源的极大浪费,对生态环境的破坏也较为严重,在运输的过程中还容易造成二次污染,环保、文明施工等问题突出。
城市河湖清淤项目由于其施工环境有以下特点:ⓐ河道两侧作业空间狭窄,土地资源受限;ⓑ城市河湖有很多影响清淤作业的附属建筑物,如人行桥、天桥等;ⓒ城市河湖水质标准高,清淤作业中对水质要求高,不能扰动水体,造成二次污染;ⓓ清淤作业点一般地处城市繁华地区,作业时既要保证水质、景观等要求,又不能影响附近居民的正常生活,环保、文明施工要求高;ⓔ城市河湖的水位可控;ⓕ城市河湖由于其运行特点,淤泥分布不均,城市河湖清淤一般为局部清淤。
鉴于城市河湖清淤项目的特点,城市河湖清淤需要小体量的环保型清淤体系。“城市河湖罩吸清淤船清淤施工工法”,解决了一系列施工问题。
2 工法特点
a.采用罩吸船进行清淤,具有一般带水清淤工艺的特点:清淤过程无须排干水体,不影响河湖正常功能及过流断面,清淤过程对水体生态系统干扰小,对周边环境影响小。
b.在“北方河湖带水清淤与淤泥脱水施工工法”的基础上进行了改进,具有一般带水清淤与淤泥脱水技术的特点,即占地面积小,对周边环境影响小,处理淤泥范围广,能耗少,操作简单,淤泥消纳量少且泥饼含水率60%以下等。
c.针对城市河湖水景观要求高、不能降水清淤的特点,研发了新型罩吸清淤技术,解决了带水清淤对水体污染、清淤有“死角”、易漏挖等问题,装置及工艺系统实用性强,具有创新性,已在北京市城市河湖多条河道清淤工程中应用,效果良好,具有推广应用价值。主要创新点如下:ⓐ采用罩式垂直上吸清淤头,将罩壳内部的水体和外面的水体隔开,避免清淤时造成水质恶化;采用立轴水平绞刀,清淤时转轴与河床垂直,切削面与河床平行,从而不会破坏河湖硬化底结构,适用性优于常规绞吸装置;ⓑ清淤船采用四桩定位,船体稳定性高;采用液压倒桩系统实现定位桩自主收放,便于转场;采用多关节液压臂灵活操控,降低了船体移动频率;ⓒ罩吸清淤船设置了GPS系统和高程测算系统,可根据清淤轨迹信息实现精确复位,避免产生漏挖,保证了清淤质量,提高了清淤效率。
3 适用范围
针对城市河湖的特点和清淤需求,本工法采用的取泥设备为罩吸清淤船,能够在空间有限的城市河湖中实现高效环保的清淤施工,特别适合城市河湖清淤项目。
本工法的适用条件为:水深1.0~3.5m;淤泥厚度不小于0.15m;水面宽度不小于6m。
4 工艺原理
本工法采用罩吸清淤船作为带水清淤系统的取泥设备,施工体系包括取泥系统、预处理系统、脱水干化系统、尾水处理系统。
取泥系统主要是罩吸清淤船,工作原理是其装有绞刀、泥泵和吸泥装置,依靠绞刀的转动翻动底部的浓稠泥浆,再用泥泵将泥浆从吸泥管吸入,经过排泥管送到岸上。
泥浆预处理系统主要包括筛分机、泥浆浓缩箱、加药箱、余水沉淀箱。泥浆通过管道输送运送到岸上的预处理系统,通过筛分机、泥浆浓缩箱、加药箱等对泥浆进行预处理,筛分掉泥浆中掺杂的垃圾等沉积物,然后进行加药预处理。
泥浆脱水系统主要装置为带式压滤机,通过压滤脱水形成泥饼。
尾水处理系统主要装置为尾水沉淀箱,上清液流入尾水沉淀箱进行沉淀,达标后排放。
4.1 罩吸头
罩吸清淤船采用罩式垂直上吸清淤头,将罩壳内部的水体和外面的水体隔开,避免清淤时造成水质恶化;采用立轴水平绞刀,清淤时转轴与河床垂直,切削面与河床平行,从而不破坏河湖硬化底结构,适用性优于常规绞吸装置。
罩吸头一般采用圆形罩壳,上口直径小、封盖,下口直径大、敞口,上盖设置挂载吊环以连接清淤船液压臂,罩壳侧面设置竖直向上的泥浆管,壳壁底口为锯齿牙。罩壳内设置液压马达驱动绞刀(见图1)。
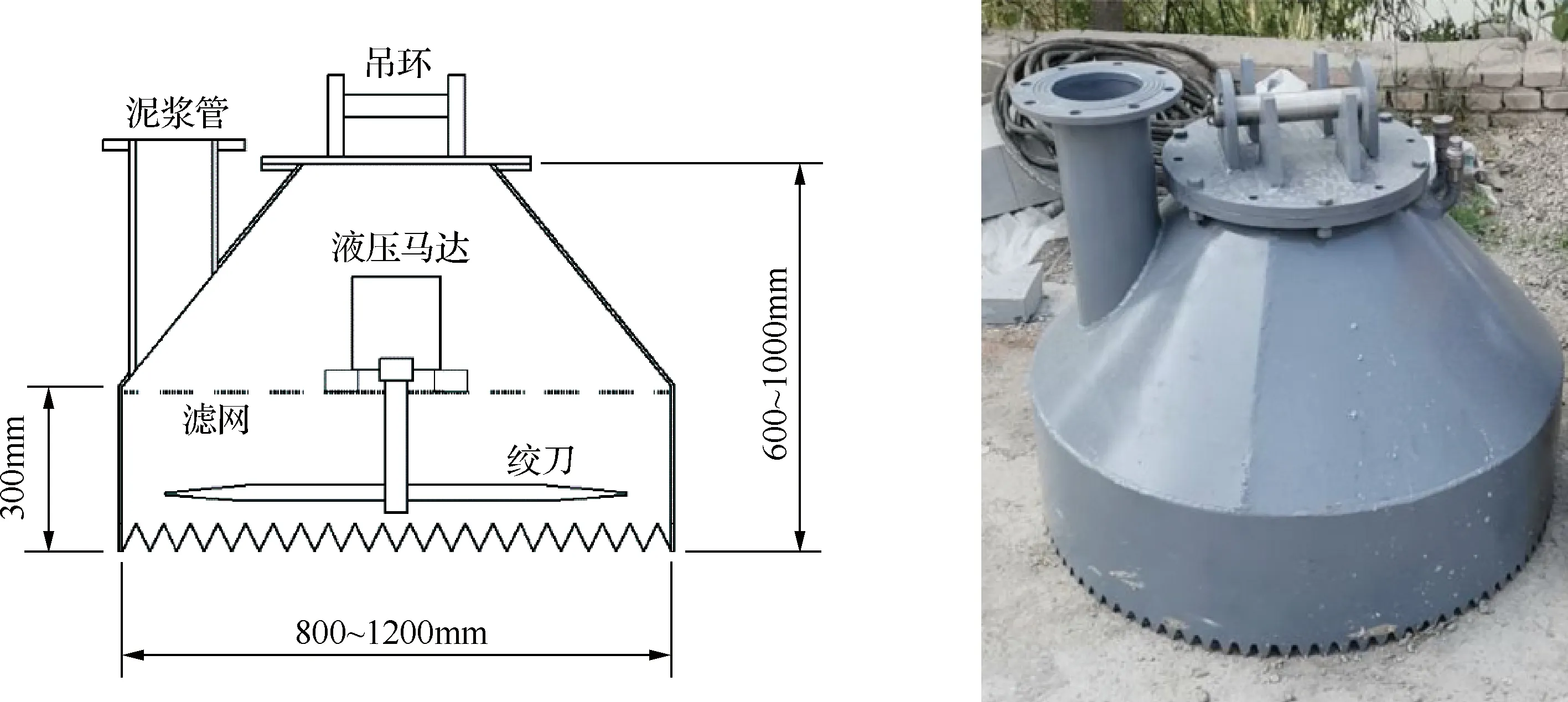
图1 罩吸头结构图和实物图
泥浆管与清淤船舱室内安装的泥浆泵连接,由泥浆泵将泥浆送出。施工时,罩头紧贴河底,罩头内、外水体隔开,通过液压马达驱动罩内绞刀,搅动淤泥,形成泥浆,再由泥浆泵将罩内泥浆抽走。施工中对罩壳外面的淤泥不会产生扰动,对周围水体影响较小,有效减少了清淤作业时悬浮颗粒或污染物在水中扩散造成的污染。
4.2 定位桩
罩吸清淤船采用定位桩支撑稳定船体。在清淤船的前后两侧设置四个对称的定位桩,采用液压系统驱动定位桩起落,平衡船体,作业时船体稳定(见图2)。
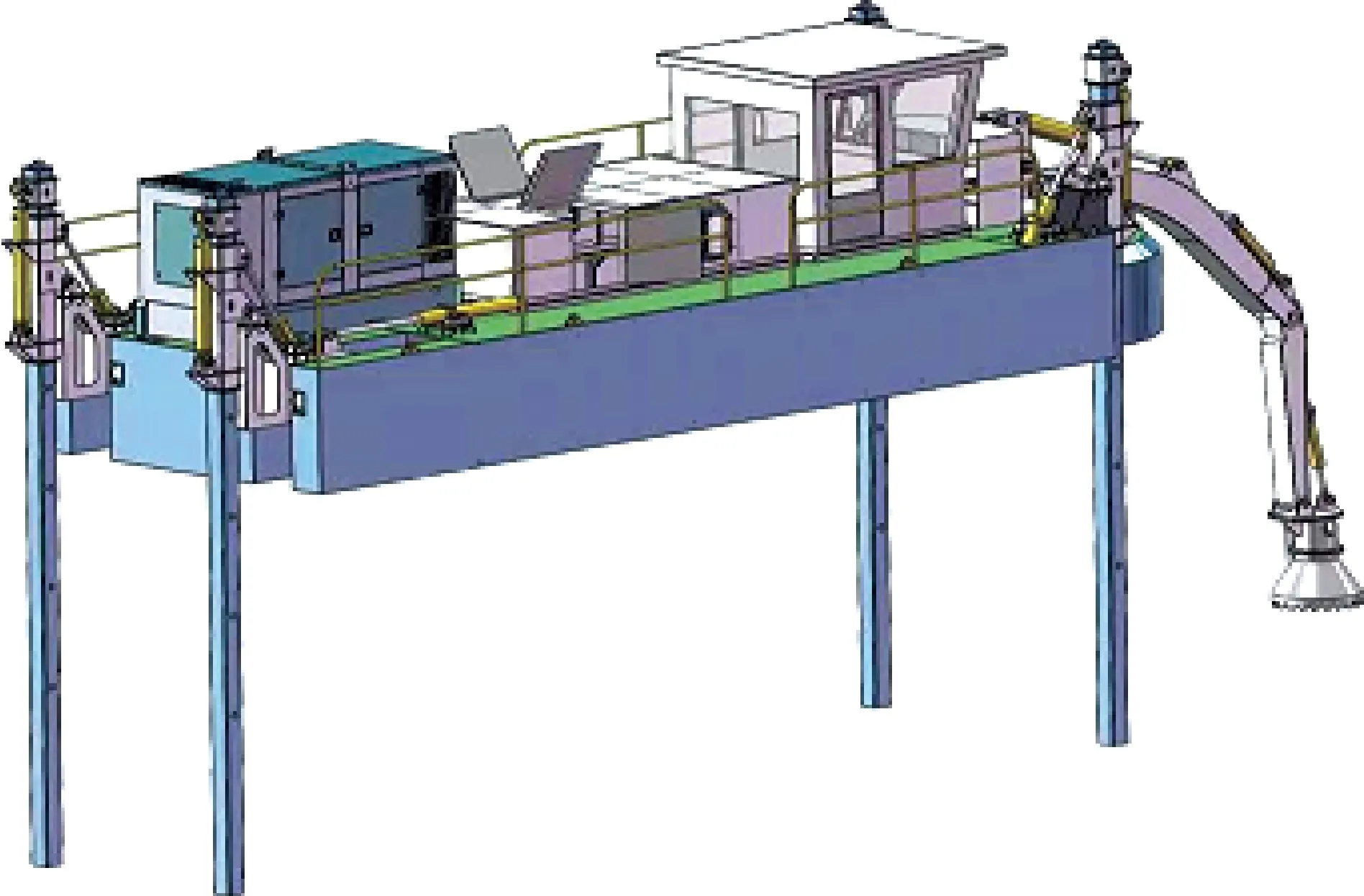
图2 罩吸清淤船四桩定位示意图
转场运输时,定位桩需要放倒;进场施工前,定位桩需要立起。为了提高工作效率,每个定位桩都配置一套倒桩专用液压系统(见图3)。
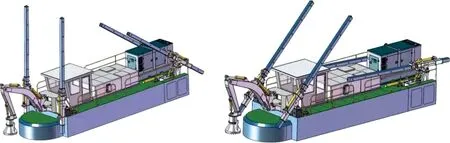
图3 罩吸清淤船倒桩动作示意图
4.3 液压臂
罩吸清淤船采用三关节液压臂,以液压系统驱动关节动作,带动罩吸头上下、左右、前后移动,作业操作灵活,可以实现清淤“无死角”(见图4)。
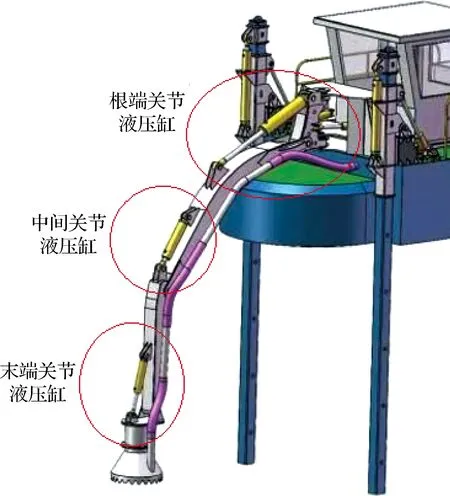
图4 液压臂多关节液压系统示意图
4.4 信息化辅助系统
罩吸清淤船配置GPS系统和高程测算系统,显示清淤轨迹和高程,辅助操控,可根据清淤轨迹信息实现精确复位,避免产生漏挖,保证了清淤质量,提高了清淤效率。
5 施工要点
5.1 施工流程
城市河湖罩吸清淤船清淤施工工法施工流程如图5所示。
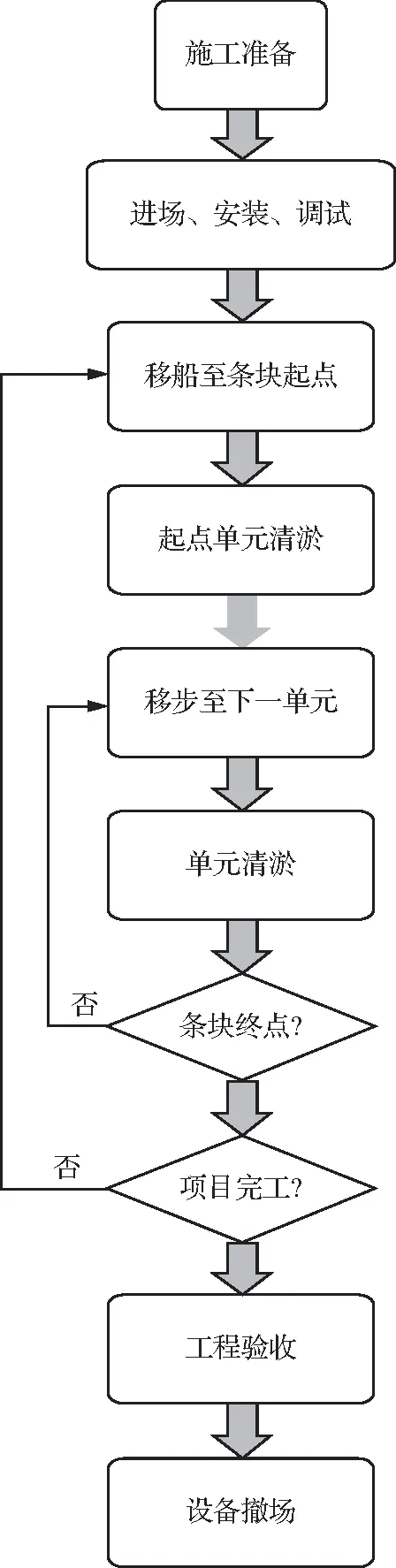
图5 施工流程
5.2 操作要点
5.2.1 清淤条块单元划分
清淤船在河水流速大于0.5m/s时逆着水流作业,即从下游开始清淤、向上游推进。采用逆流作业时,控制高程要比设计高程低0.05m,即向下多挖0.05m。河水流速小于0.5m/s时,推进方向不作要求。
清淤区域的宽度大于清淤船摆臂有效宽度时,把清淤区域划分为多个纵向的清淤条块。每个清淤条块内再划分清淤单元(见图6)。
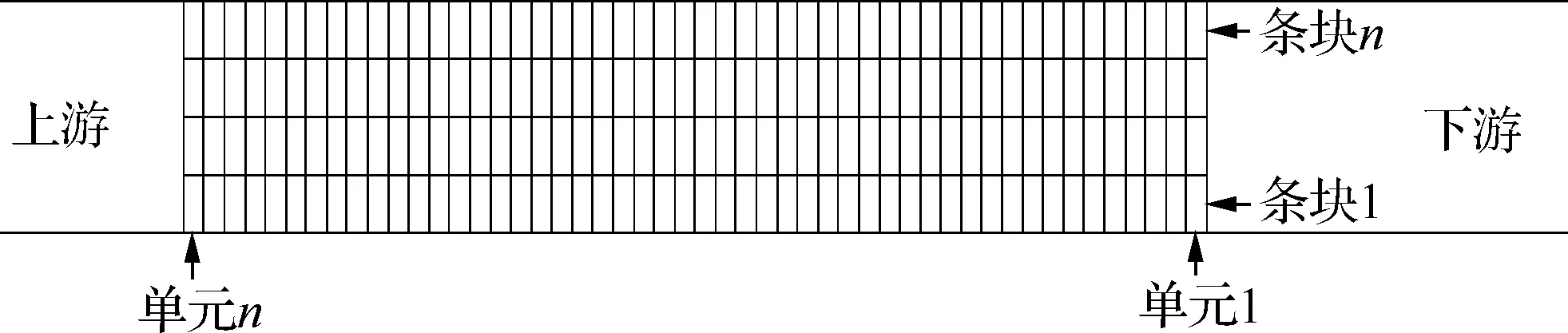
图6 清淤条块单元划分示意图
5.2.2 清淤船进场
清淤船运输时,把定位桩放倒,平放在船上(见图7)。
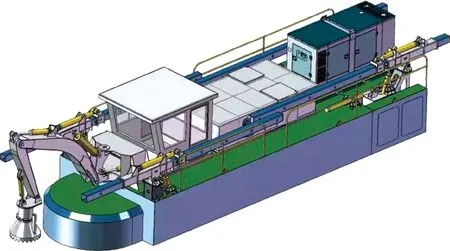
图7 罩吸清淤船运输状态示意图
清淤船运输状态总长14.5m,宽3.5m,高3m,使用半挂车运输。
根据设备重量,考虑吊车的作业能力和利用率,一般情况下可以选用一台80t级汽车式吊车进行清淤船吊放。
5.2.3 移船
清淤作业前,需要移船至清淤条块的起点。
移船方法如下:
a.清淤船由人工拉纤牵引进入下一个清淤单元,然后利用DGPS平面定位系统,找寻设计的清淤单元起始挖泥点,然后落下定位桩。
b.操作液压臂将清淤吸头调整至挖槽中线,放下吸头到达淤泥面,观察GPS轨迹图确定船位。
c.操作液压臂,将吸头放至挖槽左/右边线处放下,观察GPS轨迹图确定左右摆动界线。
d.操作液压臂,将吸头移至挖槽中线并下落到水底,调整定位桩把船定位牢,即可施工作业。
5.2.4 清淤作业
清淤船利用四根定位桩固定船位,在每个船位完成一个清淤单元作业。
罩吸头进行扫床清淤作业时,横向有效宽度为6m。通过操控液压臂上的三个关节液压缸,在船位不动的情况下,可以实现清淤吸头前后进退,距离为2m。每个清淤单元有6道圆弧轨迹,中心间距0.4m。如图8~图10所示。
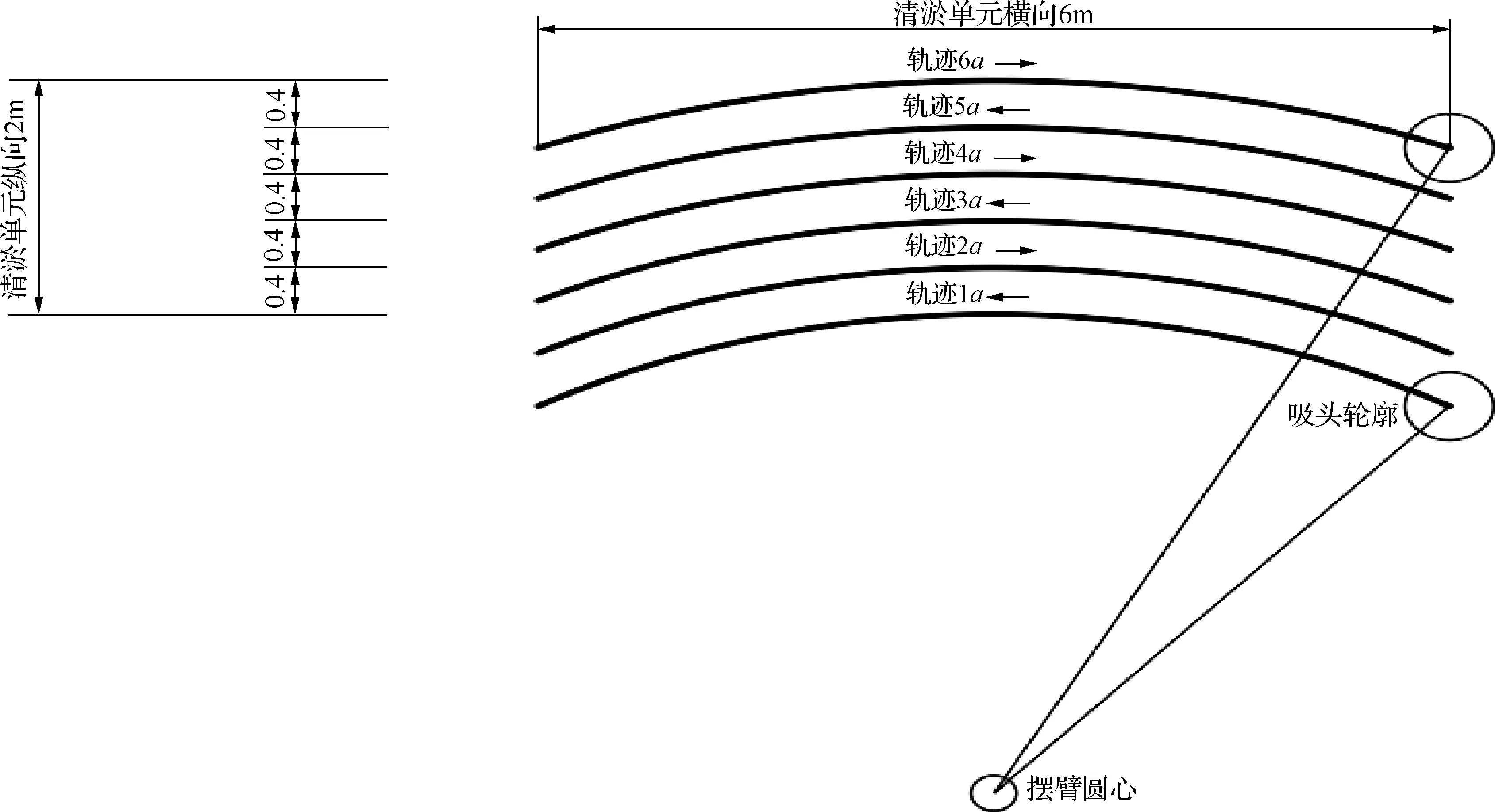
图8 扫床轨迹编号示意图(1层清淤情况)(单位:m)
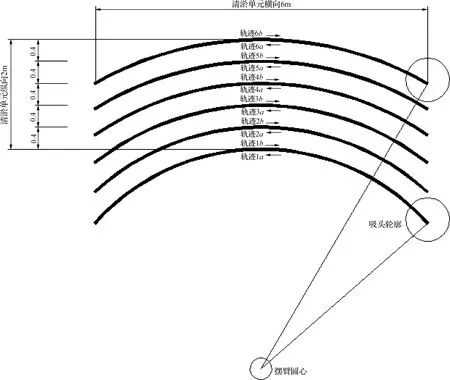
图9 扫床轨迹编号示意图(2层清淤情况)(单位:m)
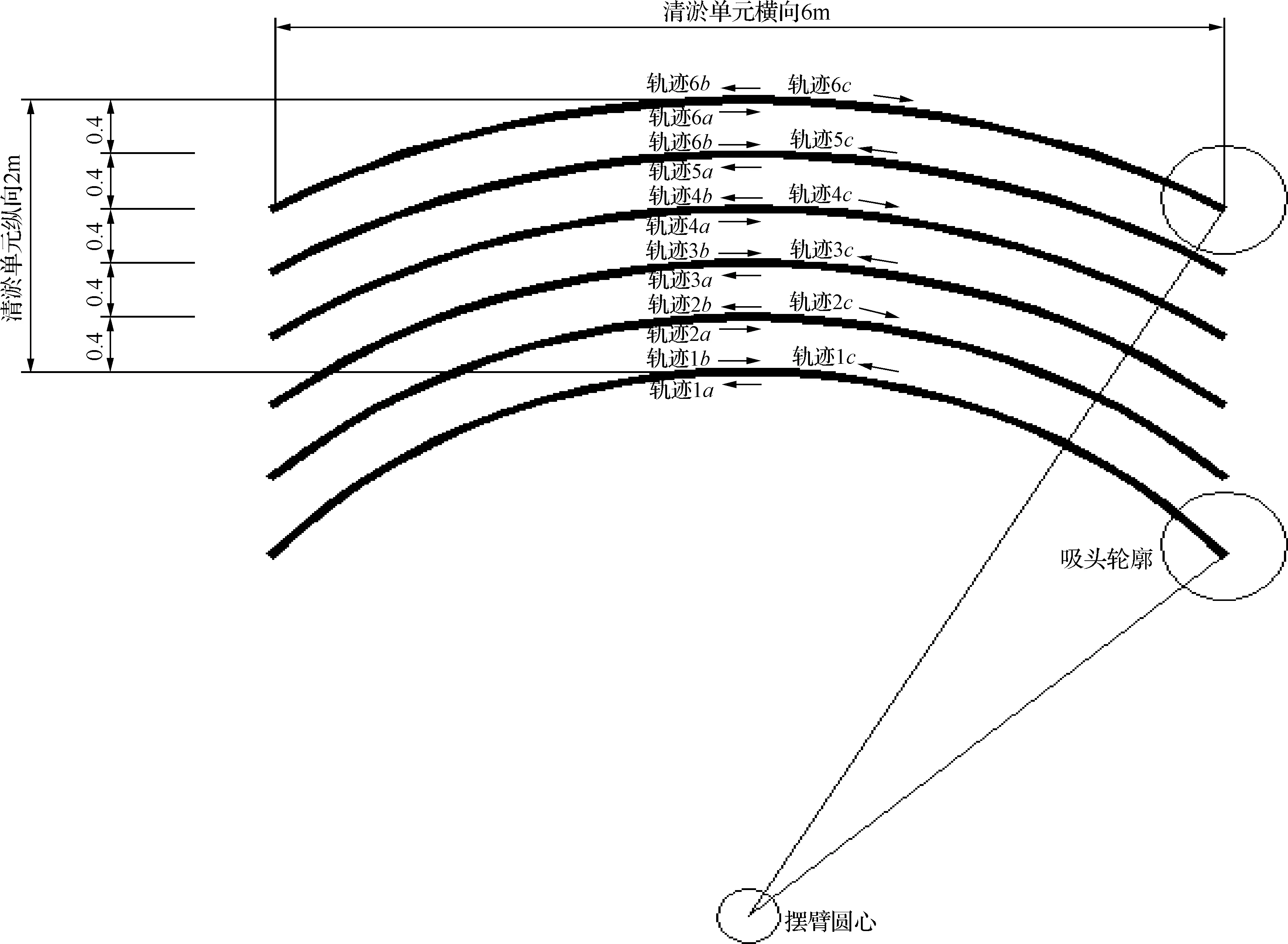
图10 扫床轨迹编号示意图(3层清淤情况)(单位:m)
本工法适用清淤厚度为0.15m以上。罩吸清淤船的最大单层清淤厚度为0.2m。根据清淤厚度的不同,扫床作业有以下两种情况:
a.需要清淤的厚度为0.15~0.6m。在一道轨迹线上完成多层扫床清淤作业,再移至下一道轨迹线。分层数量和厚度见下表。不同分层情况下的轨迹线如图8~图10所示。
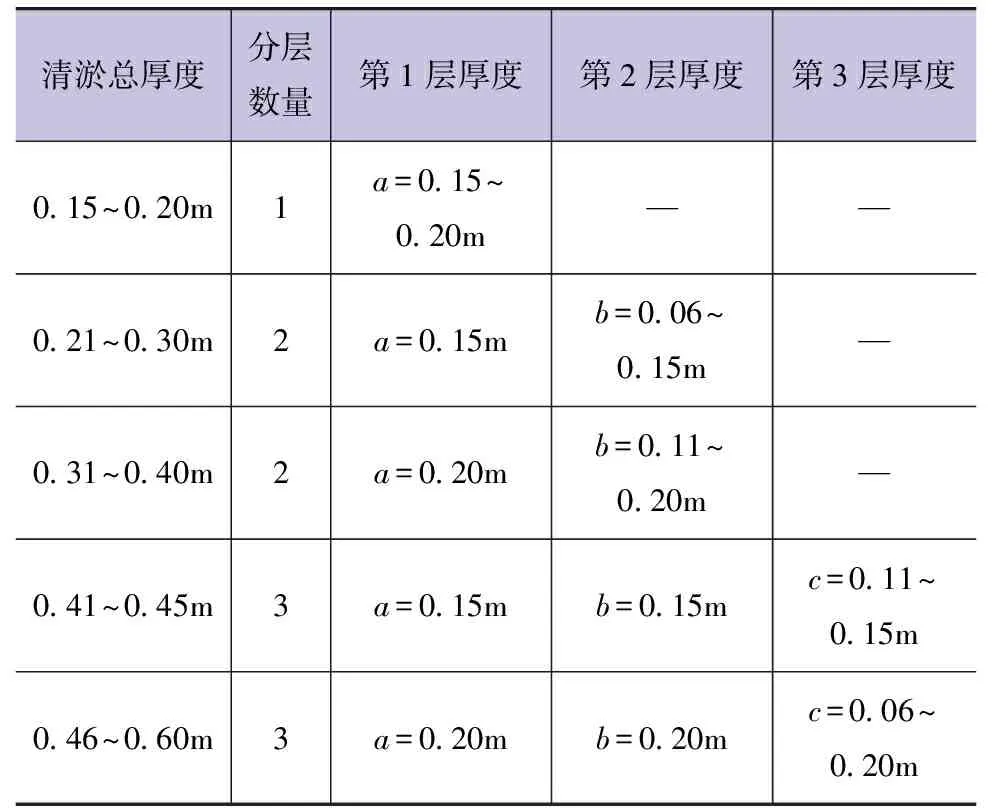
分层数量和厚度参考值表
b.需要清淤的厚度大于0.6m。先按前述情况对整个单元清淤一遍,完成清淤厚度0.6m;然后,调整吸头高程,进行第二遍更深层的清淤;依此类推。
5.2.5 移步
一个清淤单元完成后,清淤船需要移步至下一个单元。清淤船移步方法如下:
a.升起前方左右定位桩。
b.通过台车液压缸收缩实现前进或后退,期间观察台车行程传感器,保持行程不超限。前进及后退时确保前方左右定位桩升起,绞刀头离开水下泥层。
c.当台车行进到末端后,降下前方左右定位桩。
d.升起后方左右定位桩。
e.调整台车复位,期间观察台车行程传感器,保持行程不超限。
通过以上五步循环实现设备的前进或后退。每步最大距离1m,移动2m需要2步。
移步完成后,调整四根定位桩定位深度,确保定位牢固。
6 质量控制
6.1 质量标准
a.《疏浚与吹填工程技术规范》(SL 17—2014)。
b.《地表水环境质量标准》(GB 3838—2002)。
c.《污水综合排放标准》(GB 8978—1996)。
d.《水污染物综合排放标准》(DB 11/307—2013)。
6.2 质量控制措施
6.2.1 施工测量质量控制
a.测量定位依据点的交接与校测。根据总平面图及测量成果表对控制点的原始依据进行校核;校测控制点(建设单位提供的导线及高程点不少于3个)的距离、夹角及坐标;办理控制点、水准点及相关测量原始资料的交接手续。对移交后的桩点进行妥善保护,防止桩点受到扰动破坏。
b.做好实地踏勘。根据已有控制点的位置,首先了解标识和标志的位置,然后结合工程性质及地形情况初步选定加密点的位置;核查原有地形图是否与现有地物、地貌相一致,为控制网图的设计做准备。
6.2.2 挖槽宽度控制
清淤船作业必须严格按照开挖标志进行定位和施工,并应经常校核和调整船位;操作人员必须熟悉施工图纸,了解开挖的精度,掌握船舶的横移速度,选择合理的对标位置和挖宽;操作人员对开挖标志有疑问或发现有错误时,应及时向施工技术人员或测量人员反映,由测量人员进行复核或校正。
6.2.3 挖槽深度控制
施工前必须正确记录测量人员所设置的水位标尺读数,并严格按照水位标尺进行挖槽深度控制;施工前应检查、校正清淤船上的挖深指示尺,使罩吸头最低点至水面的垂直距离与挖深指示尺读数一致。挖深指示尺的零点可定在清淤船的实际吃水线上,当清淤船上的荷载以及水位发生变化时,应及时计算出挖深改正值,并调整罩吸头的下放深度;对已挖部分要随即进行水深测量,发现欠挖超过允许值时,应及时推船处理。
6.2.4 河水扰动质量控制
本工法清淤施工采用的是罩吸式清淤船,罩吸头可以将周围水体隔离开,减少了对周围水体的扰动。罩吸头提升至水面、沉入水底及移动过程中要做到缓升、缓降、缓移,避免移动幅度过大而造成周围水体的扰动。
7 效益分析
7.1 经济效益分析
本工法采用环保罩吸船进行带水清淤,较传统的环保清淤方式,具有节能、环保的优点,可以节省工期、人力、物力等,节省了施工费用,具有良好的经济效益。
通过该工法的成功应用,为北京市城市河湖清淤和水质应急处置工程共计节约成本181831.92元;为2022年北京市城市河湖清淤工程共计节约成本147684.40元。
7.2 社会与生态效益分析
本工法采用环保罩吸船进行带水清淤,较传统的环保清淤方式,具有节能、环保的优点,可以节省工期、人力、物力等,节省了施工费用。该工法适用于城市河湖清淤,提高了抽取泥浆的浓度,提高了施工连续性和施工效率,减少了对周围水体的影响范围和影响时间,实现了“四节一环保”的目标,具有一定的代表性,值得研究和总结,供类似工程借鉴。
猜你喜欢
山西水利(2022年5期)2022-09-21
治淮(2022年8期)2022-09-03
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年9期)2021-07-16
都市快轨交通(2021年1期)2021-04-02
公民与法治(2020年23期)2021-01-04
水利科学与寒区工程(2020年3期)2020-06-23
建筑科技(2018年6期)2018-08-30
筑路机械与施工机械化(2014年2期)2014-03-01
河南科技(2014年7期)2014-02-27