
机载ADVB 航电系统测试技术研究
2023-12-04 09:44李宁宁陈海洋
应用光学 2023年6期
李宁宁,陈海洋
(中国飞行试验研究院 技术中心测试所,陕西 西安 710089)
引言
目前多型军机[1]、民机、直升机等试验机均采用了新型视频总线—ADVB 进行数据传输[2],根据任务需求,需要完成机载ADVB 光纤数字视频的测试,为实时监控以及事后分析提供有效支撑。目前的研究现状是,现有测试系统只针对固定格式分辨率、DVI、VGA 等电信号进行测试,且目前机载ADVB 总线的传输速率已达4.25 Gbps,现有测试技术已经不能满足新一代飞机的测试需求。
针对该问题,有两种解决方法:一是升级测试系统内的采集记录设备,缺点是周期长、经费高,升级后也只能专机专用;二是对抽引数据进行预处理,可实现不同格式ADVB 视频的自适应转换,最终实现多型机间通用化测试,以降低测试成本。本文针对第二种解决方法进行研究,主要从以下3 个方面进行:一是分析研究ADVB 光纤数字视频特点[3],构建ADVB 光纤视频信号测试方案,完成新型机载ADVB 航电数据的光电测试;二是设计ADVB 数据自适应识别解析方案,完成不同型机ADVB 光纤视频总线的自适应接收处理,实现不同型机的通用化测试;三是针对抽引视频分辨率与现有采集设备不匹配问题,完成非常规格式视频数据的固定化转换,以兼容现有测试系统,降低试飞成本。
1 机载ADVB 航电视频数据测试方案
ADVB 是新型机载航电系统的数据传输总线,针对ADVB 传输数据多样性、高速性等特点,本文设计了ADVB 总线数据测试方案,如图1 所示。主要包括3 个单元,ADVB 数据接收单元、ADVB数据解析处理单元、视频数据采集记录单元[4]。其中ADVB 数据接收单元经过多通道光纤数字视频流接收以及ADVB 帧接收状态机(包括光电转换、串并转换、8 B/10 B 解码等)接收后,进入ADVB数据解析单元,通过传输字同步、数据映射、帧状态、数据解析以及数据重组等实现ADVB 帧数据的数据转换。转换后的常规DVI 电信号经过专用采集器进行采集、记录以及脉冲编码调制(pulse code modulation,PCM)编码输出,供课题人员进行实时监控与事后分析。

图1 机载ADVB 光纤数字视频测试方案Fig.1 Airborne ADVB optical fiber digital video test solution
2 关键技术研究
2.1 基于视频特征数据模板的自适应识别解析技术
2.1.1 多通道不同速率数据接收
多通道不同速率数据接收模块采用主动式分流处理方式,实现多通道不同数据速率的ADVB视频流的自适应快速接收[5]。主动式分流处理机制原理如图2 所示。

图2 主动式分流处理机制Fig.2 Active shunt processing mechanism
主动式分流处理机制目的是解决数据带宽与数据接收单元速率不匹配的问题,主要存在数据带宽大于数据接收单元能力以及数据带宽小于数据接收能力两种情况。主动式分流处理机制的工作原理是:当传输数据的原始发送速率低于数据接收单元的处理速率时,输入数据流控制单元将传输数据缓冲至B 缓冲区并进行预处理,此时输出数据流控制单元将控制输出A 缓冲区的数据进行下一步的图像处理,当A 缓冲区的数据输出结束后进入等待状态,直到B 缓冲预处理单元存满;当传输数据的原始发送速率高于数据接收单元的处理速率时,输入数据流控制单元将传输的数据缓冲至A 缓冲区并进行预处理,输出数据流控制单元输出A 缓冲区预处理后的数据,直至A 缓冲区存储结束,输入数据流控制单元继续输送数据至B 缓冲区,输出数据流控制单元处理完A 缓冲区后切换至B 缓冲区,继续进行下一步的图像处理。采用主动式分流机制,可以有效解决数据流堵塞与间断的问题,更好地保证数据的高效性与连续性。
2.1.2 视频数据自动解析
1)视频特征数据模板设计
不同型机、不同通道传输的视频格式存在异源、多样化特点。因此,为了实现不同格式视频数据的通用化转换,依据主机ICD 结构[6]定义,选取关键特征信息,设计了视频特征数据模板,以架机为单位[7]定义架机每个通道的分辨率、帧率、组帧方式和传输方式,为帧流中关键信息的提取提供依据。本文设计的视频特征数据模板如图3所示。

图3 视频特征模板Fig.3 Video feature template
2)数据映射处理
ADVB 总线容器头与对像0 定义了视频帧的帧率、分辨率、容器序号等信息。对容器头关键信息的映射提取,反馈识别视频文件通道,通过分辨率以及组帧模式计算每行帧数,从而直接识别后续ADVB 数据块的有效数据,减少对冗余信息解析带来的时间消耗,同时实现同型机不同通道的自适应识别解析。其中将总线物理对像,如分辨率、帧率、传输方式等实际物理信息与模板文件数据中的分辨率、帧率、传输方式数据块等进行映射,数据自动解析示意图如图4 所示。
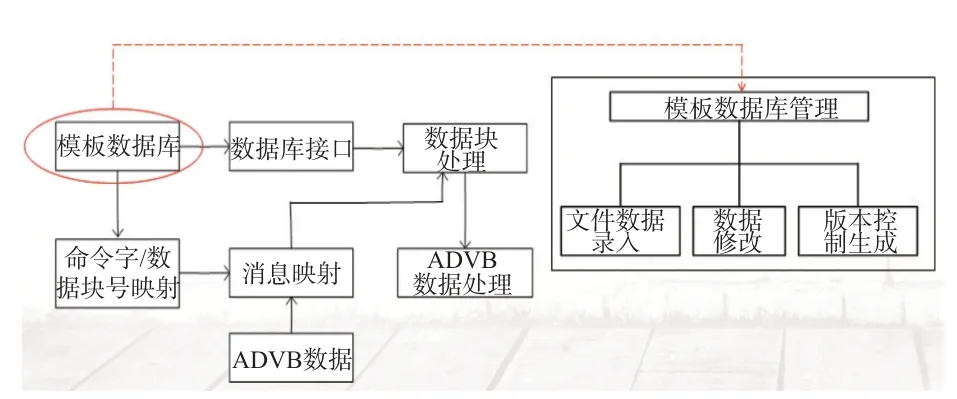
图4 数据自动解析示意图Fig.4 Schematic diagram of automatic data analysis
2.2 基于时序重构的DVI 编码技术
ADVB 视频信号采用异步传输[8]模式,即数据打包,以行为单位,按行缓存,像素数据平均分配到不同的ADVB 帧。将每个容器头的开始作为场同步信息,ADVB 帧间的IDLE 信号作为行同步信息,如图5 所示为行场同步定义,图6 为试验结果。

图5 行、场同步信息的定义Fig.5 Definition of line and field synchronization information

图6 行、场同步试验结果Fig.6 Experimental results of field synchronization
行场同步信号的恢复是设计中的难点,需要根据 ADVB 帧传送时序和VESA 标准[9]准确还原出信号的时序关系。例如光纤通道的速率为 4.25 Gbps,时钟频率为106.25 MHz,则发送数据1 个周期为 9.412 ns,由此可以计算出 ADVB 帧的传输时间和ADVB 帧的间隔时间。针对场(vs)同步信号,在同步时间之后有1 个场后消隐,紧接着是1 个顶层消隐,此时行(hs)同步时间开始,然后是1 个行后消隐,紧接着是1 个左消隐,此时开始有效数据。当一行有效数据接收结束后,是1 个行右消隐,然后是1 个行前消隐,当所有行的有效数据接收结束后,紧接着是底层消隐和场前消隐。
以专用采集设备的时序要求为标准,以ADVB时钟周期为基础,计算视频控制信号周期(行同步时间,场同步时间,前、后、左、右消隐时间),为后续DVI 编码[10]提供时序信息。以1 920×1 080 @60 fps 为例,展示了所有视频控制信号时钟信息的实现过程,如图7 所示。

图7 时序信息恢复逻辑Fig.7 Timing information recovery logic
2.3 基于迭代反投影的视频重采样技术
针对抽引视频数据受传输干扰以及噪声影响而引起数据模糊问题,提出了基于迭代反投影图像超分辨率[11-13]的方法,在单幅图像基础上,实现视频画面的重采样。将多幅图像的一帧图像作为参考图像,通过图像配准得出其他观测图像的亚像素位移量,建立图像的运动降采样模型,再通过双三次插值方法求出参考图像的高分辨率图像,并作为高分辨率图像的初始估计,利用建立的运动降采样模型对初始估计进行降质,得到多帧与初始分辨率图像对应的模拟低分辨率图像。如果两者差异小于设定的阈值,则估计出的高分辨率图像即为重建后的图像,否则,将差值反向投影到当前估计的高分辨率图像,对其进行修正,再进行降质对比,直到差值小于阈值,得到重建图像。将重建误差以各向异性的方式迭代反投影到高分辨率图像,使得高分辨率图像具有更多的高频信息,提高图像清晰度。重采样前后的图像对比图如图8 所示。
采用无参考图像质量评价算法进行对比分析,重采样前后的灰度平均梯度值提高了12.4。
3 试验验证
实验室试验链路示意图如图9 所示。原机主显的输出ADVB 光视频信号经过仿真板卡转换后,生成常规且匹配专用采集器的DVI 视频信号,采集的视频信号通过笔记本电脑进行回放。

图9 试验链路Fig.9 Test link
现有的测试系统可直接抽取原机显示系统的视频信号(DVI)进行采集,针对新型ADVB 航电总线信号,在现有测试系统的基础上,增加ADVB/DVI 转换,兼容现有视频测试系统,解决了升级视频采集设备带来的专用性与高成本等问题。
在以上试验平台基础上,目前已经实现了2 560×1 024 @30 fps 高分辨率视频的分屏与倍频[14]重采样,即2 560×1 024 @30 fps 的大分辨率。低帧率视频转换成两路1 280×1 024 @60 fps 的常规分辨率视频,如图10 所示。实现了1 400× 1 050 像素到1 600×1 200 像素、1 280×768 像素到1 280×1 024像素,即低分辨率到高分辨的上采样[15]。

图10 试验结果Fig.10 T est results
4 结论
本文从任务需求出发,在研究机载新一代航电数字视频总线ADVB 协议的基础上,通过对ADVB协议的深层解析,结合实际应用中的需求,采用基于视频特征数据模板的自适应识别解析技术、时序重构的DVI 编码技术,以及迭代反投影的视频重采样技术,实现了新型机载ADVB 航电数字视频到常规DVI 的转换、重采样与测试,完成了机载航电视频测试技术的实验室验证,解决了不同型试验机航电视频系统的通用化测试问题,并且兼容了现有的机载视频测试系统。
猜你喜欢
北京工业职业技术学院学报(2024年1期)2024-01-14
数学物理学报(2019年3期)2019-07-23
电子制作(2019年7期)2019-04-25
家庭影院技术(2018年9期)2018-11-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
电子产品可靠性与环境试验(2016年6期)2016-05-17
设备管理与维修(2016年7期)2016-04-23
项目管理技术(2015年3期)2015-04-23
湖南水利水电(2014年2期)2014-02-27
