
基于深度迁移学习的低分辨雷达目标识别方法
2023-12-04 02:38:12施端阳
兵器装备工程学报 2023年11期
施端阳,林 强,胡 冰,牛 闯
(1.空军预警学院,武汉 430019; 2. 95174部队, 武汉 430040)
0 引言
随着现代战争的发展,仅能提供目标位置信息的常规雷达已无法满足信息化战争的需要。以电子战为中心的战争对雷达目标识别技术提出了更高的要求,雷达目标识别是对雷达获取的回波数据进行处理,提取目标特征,实现目标类型、数量甚至武器挂载情况等信息的判别[1]。目前,对于空中目标的识别,主要依靠窄带雷达的目标回波信号、宽带雷达的一维距离像和二维ISAR图像进行特征提取和识别。由于宽带雷达具有较高的分辨率,可以获取目标更详细的信息,国内外学者主要针对宽带高分辨率雷达的目标识别问题进行研究。但宽带雷达作用距离比窄带小,且成本高昂、难以普及,我国现役防空雷达仍以低分辨率雷达为主。低分辨率雷达难以获取目标的结构、尺寸等精细化特征信息。使用低分辨率雷达无法对目标的具体型号进行识别,仅能够对目标的大小和架次进行判断。因此,对低分辨雷达进行目标粗略分类和识别有着广泛的应用前景。
现阶段,低分辨雷达的目标识别主要采用人工判别法。雷达操纵员利用目标回波强度及其起伏特性,结合目标运动轨迹和速度,综合判断目标的类型和数量。该方法的识别性能严重依赖于操纵员的主观经验和业务水平,存在误差大、效率低的问题。实现防空雷达自动目标识别功能是当前急需解决的难题,雷达自动目标识别实质上是从雷达回波中提取各类目标具有差异化的特征进行目标自动分类。其过程主要包含回波采集、信号预处理、特征提取和分类器设计4个阶段。前2个阶段主要是为了从雷达回波信号中整理出格式统一的回波数据集,特征提取是从回波数据中提取出目标的特征,分类器设计是根据分类准则设计合适的分类器,对输入的特征向量进行分类判别。识别特征是雷达目标识别的基础,特征的稳定性和可分性直接影响识别效果,不同体制的雷达所提取的目标特征不同,在低分辨雷达目标识别的研究中,提取的特征主要有目标运动特征[2]、波形特征[3]、调制特征[4]和极化特征[5]等。在目标识别中,分类器的性能同样起着重要作用。雷达目标识别中设计的分类器主要有模板匹配分类器[6]、决策树分类器[7]、模糊判别分类器[8]、支持向量机分类器[9]以及浅层神经网络[10]等。但上述传统分类方法需要人工提取出明确的特征矢量,需具备专业的领域知识和消耗大量的时间精力,特征提取难度较大,适用范围受限。
近年来,以深度学习技术为代表的智能化分类方法逐渐成熟,它能够利用自学习功能挖掘输入信息的深层特征,实现自动特征提取,为雷达自动目标识别提供了一种新的思路。但这类方法需要数据驱动,其识别性能严重依赖于带标签训练样本的数量和质量。而雷达在实际工作中,对于非合作目标往往很难积累大量的回波数据[11]。针对小样本条件下的雷达目标识别问题,目前主要有3种解决方案,一是数据增强[12]的方法扩充数据集。文献[13]利用生成对抗网络(generative adversarial network,GAN)产生大量逼近真实数据的样本来提高分类器的识别能力。二是元学习[14]方法泛化目标和学习内涵。文献[15]提出了一种结合概率推理和元学习的识别模型来转移先验知识,利用少量训练数据得到了更高的识别能力。三是迁移学习[16]方法将知识从源任务迁移至目标任务。文献[17]详细讨论了适合迁移到雷达目标识别任务中的网络和源任务,提出了多源数据域自适应传递迁移方法,提高了小样本下的目标识别性能。但GAN在训练时要求生成器和判别器保持同步,易发生训练不稳定的问题。元学习对数据的要求比较苛刻,要求源任务的样本量充足且与目标任务的差异性小。
为此,本文中对低分辨雷达的空中目标识别问题展开研究,考虑到低分辨雷达目标回波中无法获取目标的形状、结构等详细信息,使用雷达回波序列轮廓像构建空中目标数据集,应用卷积神经网络模型自动提取雷达回波序列轮廓像中深层的特征。模型训练时,针对小样本条件,运用模型迁移的学习方法,将经过ImageNet数据集预训练过的模型迁移到雷达目标识别任务中,实现自动识别空中目标的类型和架次。
1 雷达目标识别框架
雷达目标识别框架如图1所示。首先,对采集的雷达回波信号进行预处理,生成雷达目标回波图像;其次,从目标回波图像中提取目标回波序列轮廓像,并依此构建空中目标数据集;然后,利用空中目标数据集对迁移而来的AlexNet网络模型进行微调;最后,利用训练好的AlexNet模型对目标进行自动识别,区分出飞机的类型和架次,达到低分辨雷达对空中目标粗略分类识别的目的。
1.1 信号预处理
采集L波段某型航管雷达的I/Q信号,经过脉冲压缩处理后,进行视频处理形成方位-距离二维的雷达原始图像。该原始图像由接收的回波序列按时间和方位顺序排列而来,一帧的雷达原始图像,横向为3 726个方位序列,表示0~360°的方位范围,纵向为20 96个距离单元,表示0~150 km的距离范围,可对应于雷达B显图像。由于整帧雷达原始图像覆盖空域过大,空中目标的回波图像不明显,采取放大、裁剪等措施后将整帧雷达原始图像分割为416像素×416像素的图像块。分割时为了不遗漏目标,图像块之间有一定的重叠。原始图像块经过目标检测后,可显示目标的位置信息。部分被检测到的目标图像如图1中带红色检测框的图像所示。

图1 雷达目标识别框架Fig.1 Radar target recognition framework
1.2 空中目标数据集构建
根据目标检测结果,滤除图像中的杂波,将目标图像单独显示。该目标图像为雷达目标回波序列轮廓像[18],由雷达波速扫描时不同方位上的目标回波序列组合而成。雷达波速照射目标的过程如图2所示,由于雷达波束具有一定的宽度,天线旋转时,波束依次扫过目标的头部、中部和尾部。目标被雷达波束照射时产生的后向散射信号为
y(t,f,θ,R,α)=F(θ)·{s(t,f)*

(1)
式(1)中:F(·)为天线方向性函数;s(t,f)为雷达发射信号函数;N为目标散射点数量;σn为各散射点雷达截面积;dn为各散射点到目标中心的距离;θ为目标与雷达波束中心指向的夹角;α为姿态角;R为目标中心到雷达的距离。

图2 雷达波束扫描目标示意图Fig.2 The schematic diagram of radar beam scanning target
由式(1)可知,目标回波信号是天线方向性函数和波束指向目标中心时回波的乘积。由于目标被雷达波束照射时除了与波束中心指向的夹角发生变化,其余变量几乎不变。因此在雷达波束扫描目标的过程中,目标回波序列的幅度会出现上升、平稳和下降的情况。
由图2可知,目标回波序列轮廓像在方位上具有一定的展宽,且方位展宽对应雷达初始探测到目标时与目标刚好消失时波束中心指向θ1和θ2之间的夹角。文献[19]指出:目标轮廓像在方位上的展宽由目标横向长度引起的展宽和雷达波束宽度造成的展宽叠加而成,与目标横向长度和目标雷达横截面积(radar cross section,RCS)具有以下关系:
θ2-θ1=L/R+2θF
(2)
式(2)中:L为目标横向长度;R为目标距离;θF为发现目标时目标与波束中心指向的夹角。θF满足以下条件:
(3)
文献[20]证明了目标回波序列轮廓像与目标姿态没有太大的关系。因此,可对目标回波序列轮廓像进行分析,提取不同目标的特征,进行目标识别。
根据目标回波序列轮廓像构建空中目标数据集时,结合友邻雷达站的空情和上级下发的预飞报等信息对该型航管雷达探测到的目标回波序列轮廓像进行标注。鉴于该型航管雷达的带宽为20 MHz,距离分辨率约为7.5 m,利用它确定飞机的具体型号不太现实,但可以对飞机的类型和架次进行区分,实现空中目标的粗略识别。所以在标注数据时,将数据分为大型机一批一架、大型机一批两架、小型机一批一架和小型机一批两架4类。每类数据各200个,共计800个样本,按照7∶3的比例随机分成训练集和测试集。部分数据集如图3所示。
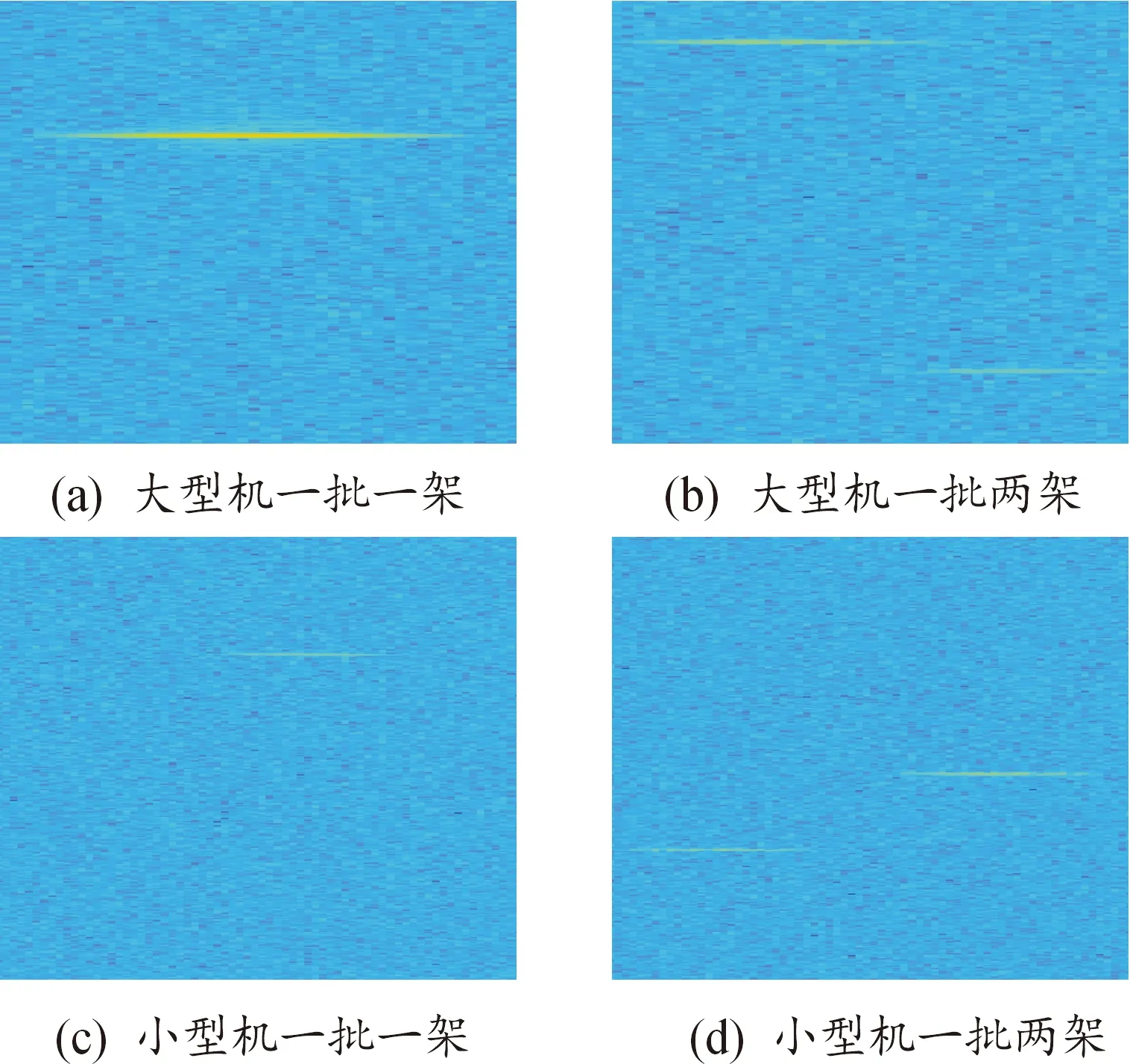
图3 空中目标数据集示例Fig.3 Aerial target dataset example
2 基于深度迁移学习的雷达目标识别模型
单隐含层的浅层神经网络在复杂的分类任务中难以提取深层的特征,模型容易欠拟合[21]。因此,为了更好的提取样本特征,本文中采用深度卷积神经网络作为目标识别模型。常见的卷积神经网络有LeNet-5[22]、AlexNet[23]、VGGNet[24]、GoogLeNet[25]和ResNet[26]等。上述网络的层数依次加深,模型愈发复杂,过拟合和梯度消失问题也越来越严重。考虑雷达目标回波序列轮廓像的特征并不十分复杂,且雷达目标识别的实时性要求较高,因此需要选择结构比较简单的网络模型。上述5类网络的层数分别是7层、8层、16或19层、22层以及50或101层。LeNet-5和AlexNet的网络层数较少且相近,但AlexNet首次使用了很多现代深度卷积网络的技术方法,其不仅包含了LeNet-5的优点还具有更强的鲁棒性,所以本文中选用AlexNet模型来识别雷达目标。
2.1 AlexNet模型结构
AlexNet模型由5个卷积层、3个池化层、3个全连接层和1个Softmax函数输出层组成,其中池化层和输出层不计入网络深度。AlexNet模型具有一系列的创新,使用非线性激活函数ReLU获得更快的收敛速度。ReLU激活函数是一个简单的分段函数,如果输入大于0,直接返回输入值,如果输入是0或更小,则返回0值;在2个池化层之后进行局部响应归一化增强模型的泛化能力;使用Dropout防止模型过拟合;使用GPU加快训练速度。AlexNet模型中通过卷积层和池化层自动提取样本中的特征,经全连接层做特征加权,通过输出层输出1 000个类别的条件概率,其模型结构如图4所示。
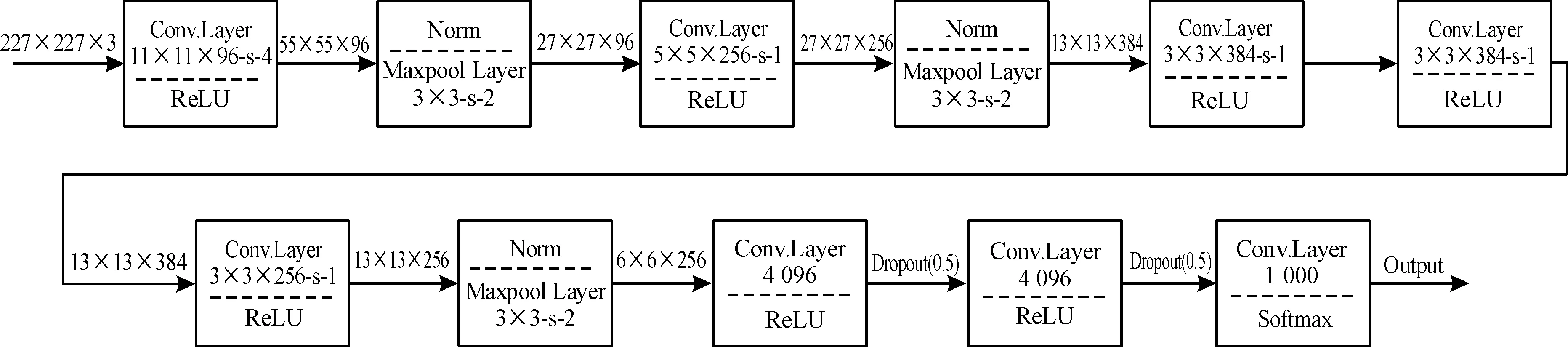
图4 AlexNet网络结构Fig.4 AlexNet neural network structure
2.2 基于迁移学习的AlexNet模型结构
由于AlexNet模型采取的是有监督的学习方式,需要大量带标签的样本对模型进行训练。但在和平年代下,非合作目标的探测机会很罕见,难以积累数量充足的训练样本,雷达目标识别不得不面临小样本学习的问题[27]。对此,引入迁移学习思想,将具有大量样本的源任务中学到的先验知识迁移到雷达目标识别任务中,改善小样本学习的性能。迁移学习按不同的迁移内容可分为关系迁移、样本迁移、特征迁移和模型迁移[28]。其中,模型迁移更适用于AlexNet模型的训练。模型迁移时有2种方式:一是去掉网络的全连接层,将网络模型视为一个自动特征提取器,根据提取的特征再单独设计一个分类器进行分类识别;二是替换网络后面的卷积层和全连接层,先通过源域预训练学习到浅层特征,再利用空中目标数据集对模型进行再训练,通过反向传播方式更新网络参数,得到最终的模型。前者要求源域的数据集和空中目标数据集有很相近的特征,但雷达目标回波序列轮廓像与ImageNet数据集中的光学图像区别较大。因此,在低分辨雷达目标识别任务中,不适合采用第一种模型迁移方式。
本文中采用第二种模型微调的方式进行迁移学习,迁移流程如图5所示,具体步骤如下:
步骤1:在ImageNet数据集上对AlexNet模型进行预训练。
步骤2:迁移AlexNet预训练模型的前4个卷积层,固定该部分的网络结构和参数。
步骤3:将迁移部分与1个新的卷积层和3个新的全连接层组合成新的网络。
步骤4:利用空中目标数据集对新网络进行再训练,对非固定的参数进行微调,将模型输出由1 000类改为4类。

图5 基于深度迁移学习的雷达目标识别流程Fig.5 The flow chart of radar target recognition based on deep transfer learning
3 实验结果与分析
为了验证所提方法的有效性,本实验采用AlexNet模型、VGGNet-16模型、GoogLeNet模型、ResNet-50模型和人工方式对雷达目标识别的效果进行对比。实验采用自建的空中目标数据集,为了保证数据来源的一致性,对采集I/Q数据时同步的雷达P显画面进行录频。人工识别时,将P显视频分别交给某雷达站操纵排10名操纵员进行独立的目标判别。AlexNet模型、VGGNet-16模型、GoogLeNet模型和ResNet-50模型的实验基于Windows10操作系统,软硬件平台:CPU为Intel(R) Core(TM) i7-10750H@2.60GHz,GPU为NVIDIA Quadro P620,内存8 GB,支持CUDA10.1加速,运用Matlab 2020b搭建雷达目标识别模型。
3.1 实验设置及训练过程
AlexNet模型、VGGNet-16模型、GoogLeNet模型和ResNet-50模型的预训练采用ImageNet数据集进行,Matlab神经网络工具箱中有预训练好的各种网络模型,可以直接下载使用。模型再训练时,均采用带动量的随机梯度下降法,动量值为0.9,初始学习率为0.000 1,批处理量为10,迭代次数为500次。
4种模型训练时,损失和准确率曲线如图6所示。

图6 模型训练过程Fig.6 The effect of transfer learning
4种模型均有较好的训练效果,随着迭代次数的增加,准确率不断提高,损失不断下降,最终收敛在较好的水平。其中,AlexNet模型的最终验证准确率为87.5%,验证损失为0.515 8,训练耗时1分40秒;VGGNet-16模型的最终验证准确率为79.17%,验证损失为0.573 2,训练耗时13分17秒;GoogLeNet模型的最终验证准确率为79.17%,验证损失为0.562 8,训练耗时36分4秒;ResNet-50模型的最终验证准确率为83.33%,验证损失为0.583 3,训练耗时50分19秒。
3.2 迁移学习效果对比
AlexNet模型具有收敛迅速、训练快捷、泛化性好和不易过拟合的优势。将AlexNet模型进行迁移学习前后的识别结果进行对比分析。随机选取一个测试样本,分别输入迁移前后的2个AlexNet模型,识别结果如图7所示。迁移学习前的AlexNet识别模型将大型机一批两架的样本误判为锤子,迁移学习后的AlexNet识别模型识别正确,说明迁移学习对AlexNet模型进行优化后,比原有的AlexNet模型具有更好的识别效果。
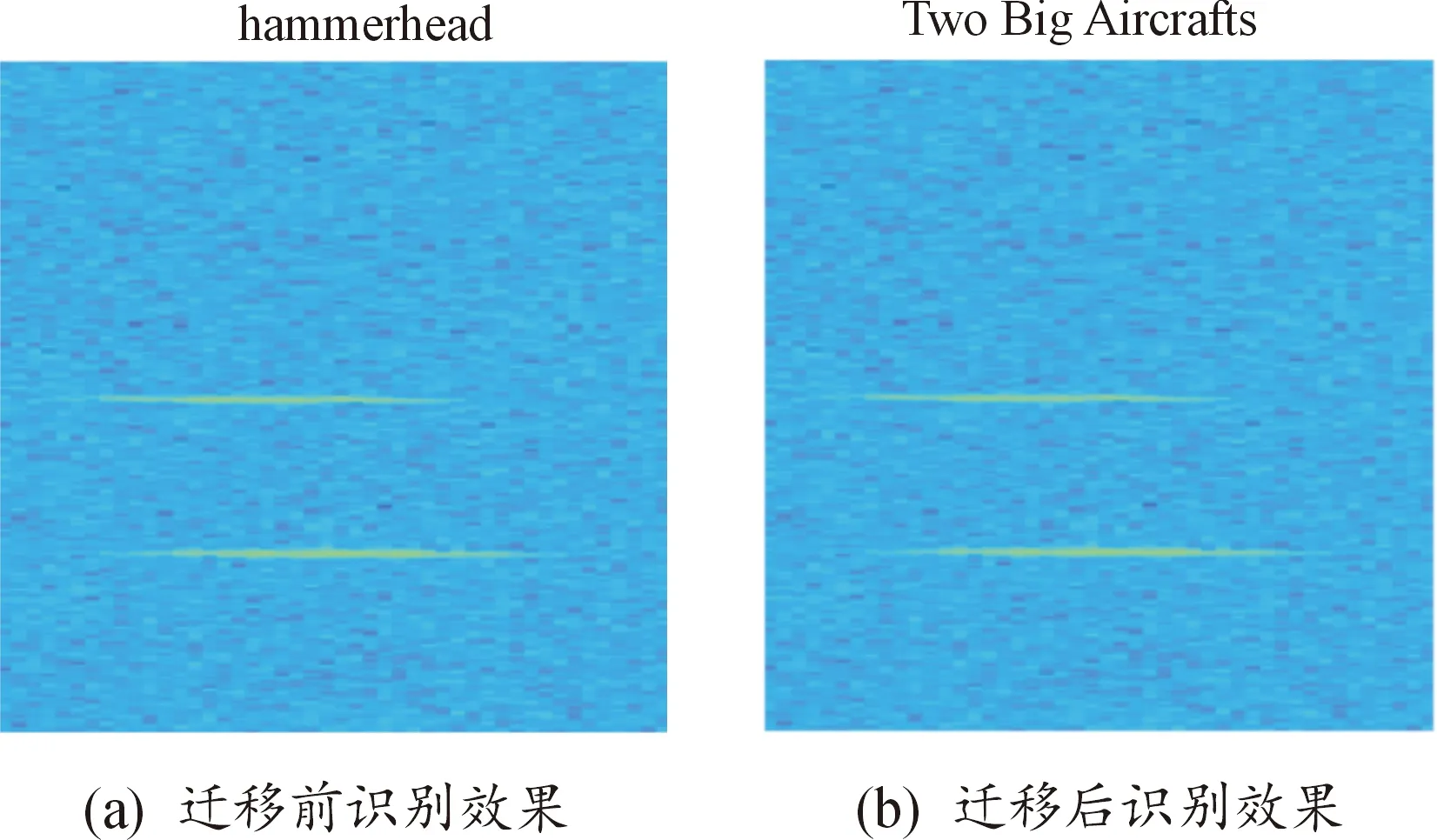
图7 迁移学习效果Fig.7 The effect of transfer learning
3.3 识别结果对比
从测试集中随机选取24个样本进行展示,识别错误的结果用红色框标出,4种模型的识别效果如图8所示。
图8中AlexNet模型识别错误2个样本,VGGNet-16模型识别错误5个样本,GoogLeNet模型识别错误5个样本,ResNet-50模型识别错误4个样本。采用平均识别率指标来评估模型的识别性能,其公式为

(4)
式(4)中:Ni为第i类识别正确的目标样本数;Mi为第i类目标样本总数;T为测试集中目标种类数。
计算识别率时,取10名操纵员的平均识别结果以表示人工识别的整体水平,同时选取识别率最高的操纵员表示人工识别的最高水平,识别率最高的操纵员记为操纵员甲。经过统计,五种方法的识别性能如表1所示。由表1可知,AlexNet模型的平均识别率最高,识别性能最优。同时,VGGNet-16、GoogLeNet和的ResNet-50模型的平均识别率低于操纵员甲高于操纵员均值,说明深度学习识别方法比大多数人工识别方法具有更好的目标识别性能,但是与极少数经验丰富的人工识别相比,还是有不足之处。但是随着工作时间的增长,人工会存在疲劳的情况,识别率会受到影响,但深度学习识别方法依赖计算机运行,不会受此影响。因此,采用深度学习的雷达自动目标识别方法还是很有必要的。

表1 不同方法识别性能对比
AlexNet模型、VGGNet-16模型、GoogLeNet模型和的ResNet-50模型对应的识别模型训练耗时和模型识别速度如表2所示。由表2可知,与另外3种模型相比,AlexNet模型的训练耗时更少,识别速度更快,综合性能更优。

表2 4种方法识别效果对比
4 结论
本文中针对低分辨雷达在小样本条件下的空中目标识别问题,在AlexNet分类模型的基础上,提出一种深度迁移学习的雷达自动目标识别方法。实验结果表明,迁移学习对深度卷积神经网络在小样本条件下具有很好的效果。深度学习的雷达目标识别方法的性能已超出了大部分人工识别方式,且具有性能稳定、全天候工作的优势,为现役低分辨雷达开展自动目标识别打下了良好的理论基础。为了全面验证本文方法的有效性,下一步将对不同型号低分辨雷达在不同工作环境下的回波数据,开展自动目标识别研究,对该方法的普适性进行分析。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
中学生数理化·高一版(2021年2期)2021-03-19 08:32:00
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
知识经济·中国直销(2018年8期)2018-08-23 09:16:16
电子测试(2018年1期)2018-04-18 11:52:35
数学学习与研究(2017年3期)2017-03-09 18:12:42
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
中国老区建设(2016年1期)2016-02-28 09:32:00
火控雷达技术(2016年3期)2016-02-06 02:30:26
