
多子阵合成孔径声呐后向投影自聚焦成像方法
2023-12-04 06:38:04姚永红
舰船科学技术 2023年20期
姚永红,张 旭,宋 伟
(1.无锡职业技术学院控制技术学院,江苏 无锡 214121;2.中国科学院声学研究所东海研究站,上海 201815)
0 引言
合成孔径声呐(Synthetic Aperture Sonar,SAS)是一种水下成像设备,其利用小孔径基阵的运动来合成等效的大孔径,实现方位向的高分辨率成像[1]。与传统侧扫声呐相比,SAS 在水下目标探测、识别上具有较大的优势[2]。不同于合成孔径雷达,SAS 通过多子阵方法来解决探测距离和方位向高分辨率之间的矛盾,进而提高测绘速率。另外,由于水声信号的传播较电磁信号需要更长的时间,使得“停-走-停”的近似在声呐成像中不再有效。多子阵结构及非“停-走-停”传播几何增加了成像算法的复杂性,需对传统的单基算法加以适应性改进,才能将其应用于SAS 成像[3–4]。SAS 后向投影算法(Back Projection,BP)是最基本的成像算法,其基本原理是计算各方位时刻平台位置与目标点的双程延时,再据此选取该目标点在各方位时刻对应的回波数据相干累加,进而得出目标函数。BP 算法的图像重建过程不存在理论近似,且多子阵结构、非“停-走-停”传播几何及空间采样不均匀等因素对其影响小,是一种精确的时域高分辨成像算法。计算量大的缺点限制了其在实时成像中的应用,但随着电子技术的发展和信号处理能力的不断提升,BP 算法的研究又重新引起了人们的重视[5–7]。
平台沿理想直线运动是SAS 获得高分辨图像的关键。但在实际工作中,海浪、暗涌和平台自身的不规则运动会影响航行轨迹,导致其产生运动误差。高分辨率SAS 一般要求运动误差小于波长的1/8,否则会影响图像分辨率及聚焦效果。因此,需要对运动误差进行补偿才能获得聚焦良好的SAS 图像[8–9]。由于运动传感器精度有限,不能满足高分辨率SAS 成像要求,因此经过传感器测量运动信息补偿后的回波数据仍会有相当部分的残余运动误差存在,引起接收信号相位误差,导致图像聚焦质量下降;且当残余运动误差引起的距离徙动大于一个距离分辨单元时,便会导致SAS 图像二维散焦。
解决上述问题的一种思路是用图像自聚焦方法估计出回波中的相位误差和残余距离徙动,并在回波数据中予以补偿后再成像,使成像质量得到一定程度的改善[10–11]。由于BP 算法属于时域成像算法,因此传统适合频域成像算法的自聚焦方法难以与其结合。综合目前的研究成果,可知针对SAS 时域成像的自聚焦问题还缺乏相关研究。本文通过分析非“停-走-停”条件下多子阵SAS 后向投影算法成像运动误差模型,结合BP 算法层析成像的特点及图像对比度最优化准则,提出一种多子阵SAS 后向投影自聚焦成像方法,有效解决了残余运动误差下BP 成像散焦的问题,增大了BP 算法的适用范围。
1 多子阵SAS 后向投影成像模型
1.1 回波信号模型
多子阵SAS 数据采集几何模型如图1 所示,场景中心点O定义为坐标原点,沿航迹方向定义为X方向。不失一般性,设声呐工作在斜视模式,斜视角为θs,正侧视模式时,θs=90◦。假设载体沿着理想航迹以速度v匀速直线航行,u表示某方位时刻发射基元的方位向坐标,∆di为发射基元与第i个接收基元的间距。发射基元相位中心的瞬时坐标为(xa,ya,za),H为航迹与场景的高度差,Rref为作用距离,即孔径中心与场景中心的距离。

图1 多子阵SAS 成像几何模型Fig.1 Imaging geometry of the multiple receiver SAS
在成像场景所在坐标系中,发射基元相位中心的瞬时坐标在平台理想运动的情况下可表示为:
对于场景中位置坐标为(x,y,0)的目标,在理想航迹情况下,声信号在发射接收期间的传播路程为:
式中:RT为发射换能器到目标的传播距离;RRi为非“停-走-停”情况下第i个接收基元到目标的距离,用坐标表示为:
式中,t*为声信号从发射到被第i个接收基元接收所经历的时间。声信号发射接收期间的双程传播路程等于目标与发射阵、接收阵的实际距离之和,即
式中,C为声速。解式(4)得到:
式中:∆R为理想航迹与实际航迹下场景中某点目标P的声信号双程传播距离差。由于对于任意目标而言,R(xa,ya,x,y)与R0(xa,ya,x,y)都是随接收基元位置xa+∆di+vt∗变化,所以∆R也是xa+∆di+vt∗的函数。
声呐发射线性调频信号为:
其中:τ为距离向时间;K为调频斜率;T为信号的脉宽;rect(∗)为信号包络。
对回波信号接收解调及距离脉压后可得
式中:σ(xa,x,y) 为目标对于发射基元在xa的声反射系数;Ω为成像场景范围。
1.2 BP 成像及运动误差的影响
对式(9)所示声呐回波数据进行后向投影处理来重建场景图像,重建过程中需乘以用于后续层析图像的相干叠加。各方位脉冲得到的层析图像为:
式中:m为方位向回波脉冲索引,xa与ya都随m而变化;Sm(x,y)为第m个回波脉冲后向投影所得复图像,为了分析方便将 ∆R写成 ∆R(m)的形式。将合成孔径时间内各方位回波后向投影得到的层析图像相干叠加,得到BP 成像结果:
可知,运动误差 ∆R(m)使目标回波在距离向存在偏移,同时引入相位误差。在运动传感器精度不够的情况下,运动误差是未知的,所以一方面相位误差会导致层析图像相干叠加失败,另一方面超出一个距离分辨单元的包络偏移会使重建后的目标位置在距离向出现偏移,两者导致图像的二维散焦。若能通过图像自聚焦技术估计出相位误差,并利用其计算得到相应的运动误差 ∆R(m),则能够改善图像聚焦质量。
2 结合自聚焦的BP 成像
根据式(11),当∆R(m)小于一个距离门宽度时,只需对各脉冲后向投影子图进行相位误差补偿,然后通过相干叠加便能得到聚焦良好的SAS 图像:
SAS 图像的对比度为图像强度的标准差与均值的比值:
式中:E(·) 为求均值;|I(x,y)|2为图像中坐标为(x,y)点像素的强度。对于给定的S A S 图像,信号能量E(|I(x,y)|2)是一个常数,因此式(13)可进一步等价为:
式中:Nx和Ny分别为图像在方位向与距离向的像素单元个数。
基于图像对比度的自聚焦算法是以图像对比度最优化为标准,对比度越高则聚焦效果越好;而当SAS图像中相位误差为0 时,其对比度则最大。图像自聚焦过程也是相位误差补偿的过程,相位误差补偿精度越高,图像的聚焦效果越好。对比度是)的函数,通过求解对比度的最大值问题,即式(14) 对求导,得到对比度最大时的极值点即为相位误差函数的估计值为:
式中:
分析多子阵SAS 信号双程传播距离表达式发现,即便声呐载体在y向、z向上的运动误差均小于一个距离单元,∆R(m)在某些方位位置会大于一个距离单元,若不将该运动误差在BP 成像之前的距离脉压信号上予以补偿,则会导致自聚焦失败。针对该问题,先通过粗栅格BP 成像以降低距离分辨率,使得 ∆R(m)小于一个距离分辨单元,从而可利用对比度最优准则估计出相位误差,同时根据相位误差估计结果计算出相应运动误差 ∆R(m),然后对脉压后的原始回波数据进行相位及包络补偿。最后,对补偿后的回波数据进行细栅格BP 成像得到精聚焦的SAS 图像。具体实现步骤如下:
步骤1设置BP 成像栅格距离向宽度为设计值的一倍,将各方位脉压后的回波数据分别进行后向投影得到粗栅格复图像Sm(x,y);同时初始化迭代次数索引l=0,初始化各脉冲相位误差为0,初始化对比度门限为T0。
步骤3按式(14)计算图像对比度Cl+1,同时计算对比度增加的比例Tl=(Cl+1-Cl)/Cl,将Tl与初始化设定的迭代终止门限T0比较,当Tl>T0时则返回步骤2继续进行下一次迭代,否则迭代终止。
步骤4对每次迭代所估计出的相位误差求和得到总的相位误差将Na个方位脉冲对应的相位误差解缠绕处理,并根据-2πfc∆R(m)/c计算出各方位脉冲包络偏移量的估计值 ∆R(m)。
步骤5通过插值对脉压后的各方位原始回波数据进行大小为∆R(m)包络搬移,同时乘以相位误差补偿量然后设置BP 成像栅格距离向宽度为系统设计值,进行细栅格BP 成像,得到各方位脉冲后向投影得到高分辨率复图像Sm(x,y)。
步骤6重复步骤2 与步骤3,当Tl小于终止门限T0时,步骤2 中的I(x,y)即为最终的聚焦好的BP 成像结果。该步骤是对细栅格(距离像素为系统设计值)下的BP 图像进行自聚焦处理,由于经过前面步骤1~步骤5 的处理,引起图像距离向散焦的残余距离运动误差得以补偿,故只需对细栅格BP 图像进行方位向的相位补偿处理,即步骤2 和步骤3 的处理。
上述步骤中包含2 次BP 成像过程,其中第1 次是粗距离分辨率成像,该次成像是为了避免跨距离单元的运动误差对相位估计的影响;第2 次是对回波数据进行运动误差、相位误差补偿后的高分辨率成像。若运动误差 ∆R(m)在整个合成孔径时间内都小于一个距离单元,则可以直接进行高分辨率的BP 自聚焦成像,以节省成像时间。本文提出的多子阵合成孔径声呐后向投影自聚焦成像方法信号处理流程如图2 所示,其中Py0为系统设计距离向像素大小。
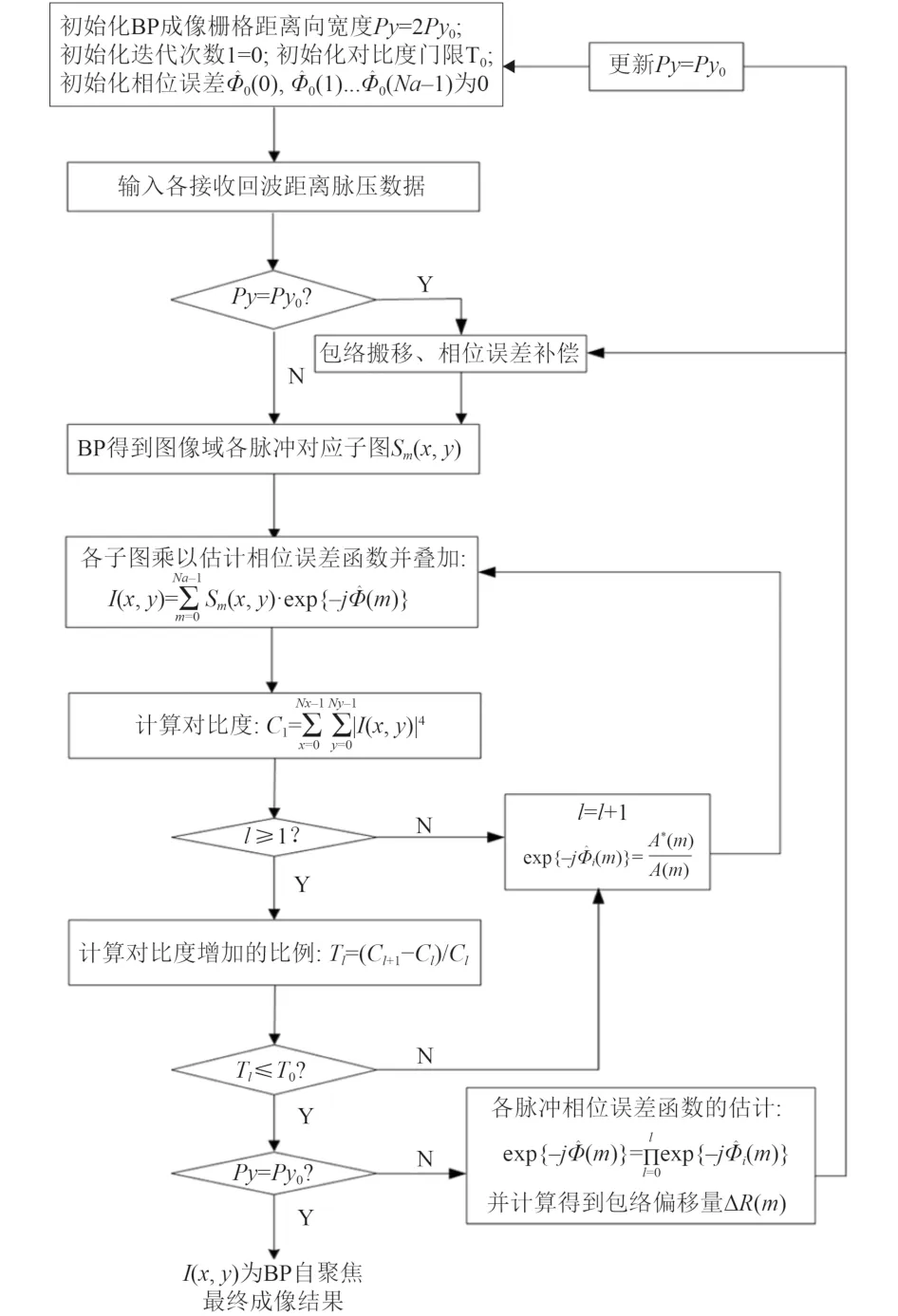
图2 多子阵SAS 后向投影自聚焦成像信号处理流程图Fig.2 Signal processing flowchart of BP autofocus for multiple receiver SAS
3 仿真实验及分析
3.1 仿真参数
仿真参数设置见表1,点目标回波时延的由式(5)给出。仿真场景为理想平地,区域内共设置9 个点目标,1 个位于场景的坐标原点,另外8 个均匀分布在以原点为中心、边长为10 m 的正方形4 条边上。为验证新方法对声呐残余运动误差的补偿效果,在一个合成孔径时间内加入1 个周期的侧摆扰动和2 个周期的升沉扰动,扰动形式都为正弦震荡,幅度分别为0.02 m、0.01 m,运动误差位移曲线如图3 所示。
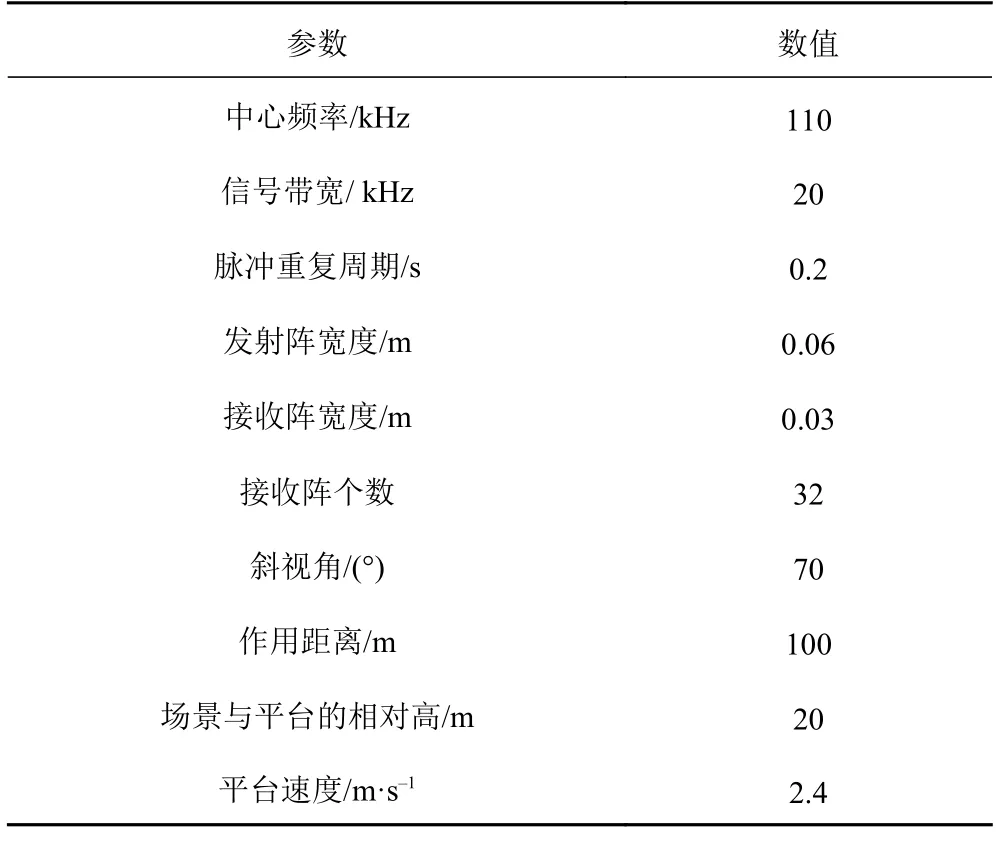
表1 系统仿真参数Tab.1 Parameters for system simulation
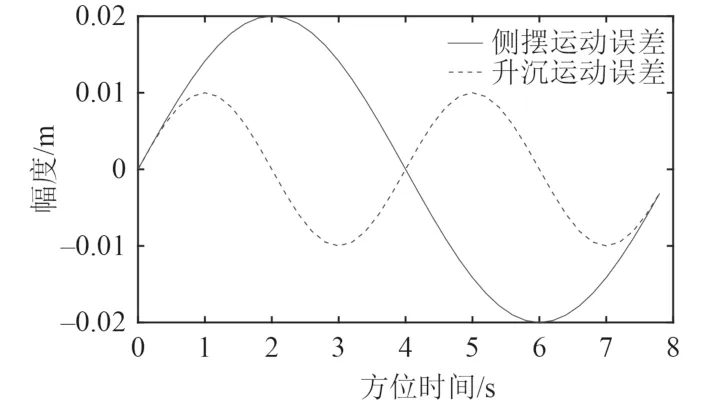
图3 运动误差曲线Fig.3 Motion error curves
3.2 结果及分析
对点目标仿真数据进行成像处理,传统的后向散射算法成像结果如图4(a)所示。可以看出,9 个点目标都呈“长条状”,存在严重的散焦。本文所提方法的成像结果如图4(b)所示,其中各点目标聚焦良好。为了衡量本文所述方法的成像效果,取右下角位置点目标周围的64×64 像素进行放大显示,各步骤对应的结果如图5 所示。图5(a)是没有自聚焦的传统BP 成像结果,点目标响应在方位向分散于31 个像素单元里,在距离向分散于3 个像素单元里,总体呈现两维散焦,且方位散焦尤为严重。图5(b)是利用本文方法进行处理,但未对包络偏移进行补偿的结果,点目标响应在方位向分散于4 个像素里、距离向上分散于3 个像素里,可见经过相位误差补偿后方位向的聚焦情况改善明显,但距离向散焦情况没有改善。图5(c)是经过本文方法全部步骤处理得到的成像结果,点目标响应基本聚焦在1 个像素单元里,可见本文方法能够很好地处理BP 成像中残余运动误差的影响,明显改善成像质量。
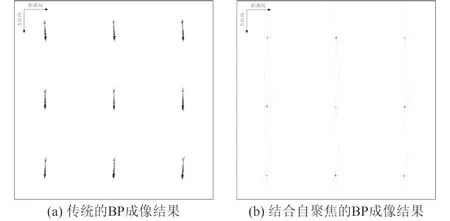
图4 运动误差下的成像结果Fig.4 Imaging results of simulation data with motion error
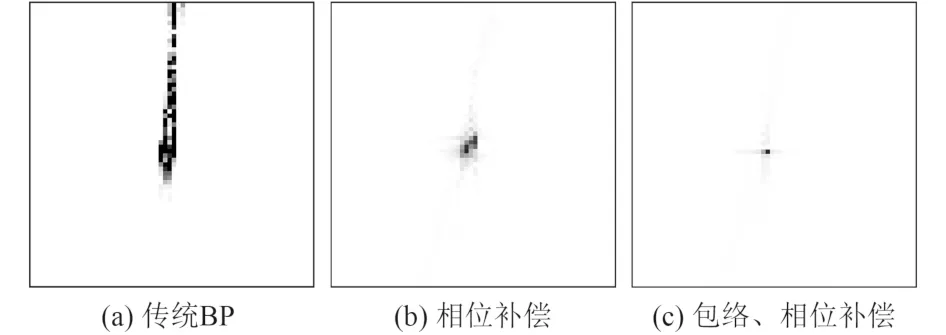
图5 场景中某边缘点目标的成像结果对比Fig.5 Comparison of imaging results of an edge point target with different method
表2 给出了图3 中3 幅图像的熵和对比度。由表中数据可直观的看出,相比传统的BP 算法,结合自聚焦的BP 算法所得图像的熵降低了50.2%、对比度提高了369%,进一步证明了本文方法能够显著提高SAS 图像的聚焦效果。
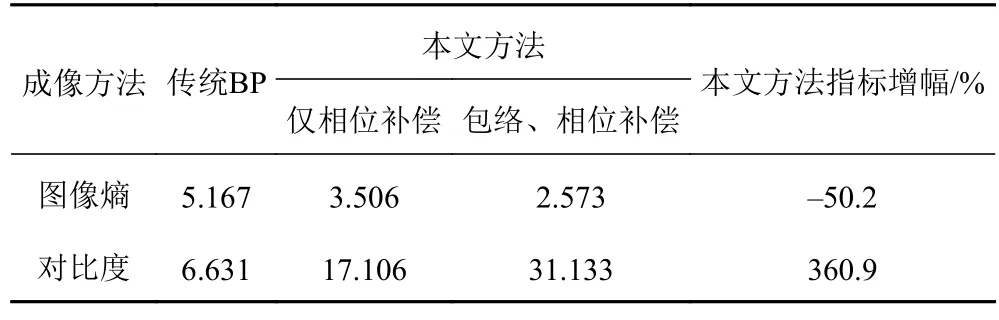
表2 图像熵及对比度的比较Tab.2 Image entropy and contrast of different methods
选取某边缘点目标的两维剖面进行量化分析,为了显示效果,对数据作16 倍内插处理,点目标的方位、距离剖面如图6 所示。其中,虚线为未作自聚焦的传统BP 成像结果,实线为本文方法成像结果。由图6 可知,残余运动误差导致传统BP 成像结果中点目标方位向主瓣严重展宽、旁瓣抬高,且距离向旁瓣升高;而通过本文方法处理后,两维聚焦效果改善明显。
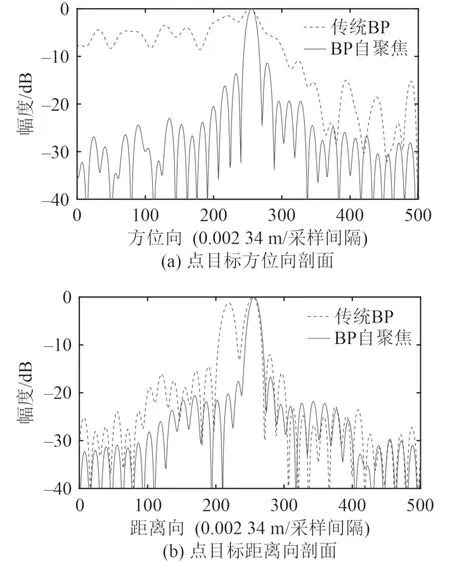
图6 点目标的两维剖面Fig.6 Range and azimuth slices of point target
为了能更清楚地比较2 种方法的成像效果,对图6 中的目标分辨率(IRW)、峰值旁瓣比(PSLR)、积分旁瓣比(ISLR) 进行测量,结果如表3 所示。可知,经本文方法处理的点目标积分旁瓣比、峰值旁瓣比明显降低,方位向分辨率提高了4.5 倍,进一步证明了本文方法能够很好地消除残余运动误差给BP 成像带来的影响,提高点目标成像质量。

表3 两种方法的点目标质量指标对比Tab.3 Point target quality parameters of the two methods
4 结语
本文提出一种用于高分辨率多子阵SAS 的后向投影自聚焦成像方法,该方法在BP 算法的基础上,以图像对比度大小为准则、通过多次迭代估计相位误差。同时针对超出一个距离分辨单元的距离徙动误差导致自聚焦效果不理想的问题,提出首先通过在粗分辨率图像下利用自聚焦估计出相位误差和残余运动误差,然后利用估计结果对原始回波数据补偿,最后再进行细栅格下的后向投影自聚焦成像以得到聚焦良好的SAS 图像。仿真试验表明,新方法能够很好地在BP 算法中对残余运动误差及相位误差进行补偿,显著改善目标响应特性,提升成像质量,证明了该方法的有效性和可行性。
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
光学仪器(2018年3期)2018-10-10 09:18:34
科技创新与应用(2017年11期)2017-04-27 16:35:27
海军航空大学学报(2016年6期)2016-12-27 03:21:47
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
