太极计划时钟噪声传递的地面原理验证
2023-12-01 05:49刘河山罗子人
中国光学 2023年6期
江 强,董 鹏,刘河山 ,罗子人,
(1.国科大杭州高等研究院,杭州 310024;2.中国科学院大学,北京 100049;3.中国科学院长春光学精密机械与物理研究所,长春 130033;4.中国科学院力学研究所,北京 100190)
1 引言
2016 年初,美国地基激光干涉引力波天文台LIGO(Laser Interferometer Gravitational-wave Observatory)地面探测器宣布成功探测到引力波,这一重要科学发现验证了爱因斯坦广义相对论的预言[1]。引力波为人类探索宇宙提供了全新的方式,引力波信号跟电磁波信号一样,是一个宽频带的信息载体,受干涉仪臂长和地面振动噪声的限制,LIGO、VIRGO 等地面引力波探测器主要关注10 Hz~10 kHz 频段的引力波事件。为了克服地面噪声和干涉臂长的影响,探测到更低频率的引力波信号,自从上世纪80 年代起,科学家们提出空间引力波探测计划,关注的频率范围在0.1 mHz 至1 Hz 之间。此频率区间的引力波源主要包括超大质量黑洞的双星聚结、极端质量比螺旋,以及白矮星和中子星双星的初始螺旋,具有重大的天文和宇宙学意义[2-3]。
20 世纪 90 年代,欧洲 ESA (European Space Agency)和美国 NASA (National Aeronautics and Space Administration)合作,开始发展空间激光干涉引力波探测项目(Laser Interferometer Space Antenna,LISA),预备发射3 颗相同的卫星,组成边长为 5×106km 的等边三角形,在地球同步轨道上围绕太阳运转,其探测频段为0.1 mHz~1 Hz,任务执行时间为 1~5 年。这是最早开始发展的空间激光干涉引力波探测项目,也是目前国际上发展最成熟的空间引力波探测计划[4-5]。
我国目前已提出的空间引力波探测计划包括以中国科学院吴岳良院士作为首席科学家的“太极计划[6-7]”和以中山大学罗俊院士作为首席科学家的“天琴计划[8-9]”。太极计划由3 个相距300 万公里的航天器(Spacecraft)组成,形成等边三角形,观测的波段为0.1 mHz~1 Hz。每个航天器包括两个相同的光学组件,每个光学组件包含一个测试质量块,测试质量块只受到引力的作用。利用星间外差激光干涉仪测量测试质量块之间的微小位移,测量精度需要达到1 pm/Hz1/2[10-13],航天器上的数字相位计通过提取干涉拍频信号的相位获得引力波信号。每个航天器配置一个星载超稳时钟(Ultra-stable oscillator,USO),作为航天器的时钟基准。相位计通过和超稳时钟进行比对,提取干涉信号的相位变化。为了达到1 pm/Hz1/2的测量精度,太极计划要求USO 的相位噪声不超过2π×10-6rad/Hz1/2。由于多普勒效应的存在,干涉载波信号频率在5~25 MHz 之间波动,对应的USO 的计时误差应小于40 fs/Hz1/2,目前没有满足此要求的星载USO,须抑制时钟噪声以达到太极计划的需求[14-15]。
消除时钟噪声的主要思路有两种[16-17]:(1)三颗卫星时钟采用类弱光锁相的方式进行同步;(2)测量得到星间的时钟相对误差。前者会使光学系统的复杂度过高,因此,太极计划拟采用后者消除时钟噪声。消除过程主要包括两个步骤,第一,时钟噪声传递,把一颗卫星上的时钟信号传递到另一颗卫星上;第二,通过构造合适的 TDI(Time delay interferometry)数据,将时钟噪声从相位数据中消除[17-19]。TDI 是一种普遍应用的数据后处理方法,本文主要研究和验证第一步,即时钟噪声传递。
目前国际上主流的时钟噪声传递方案是边带倍频传递(Sideband Multiplication Transfer Scheme,SMTS)[10]。其基本原理是将星载时钟倍频至GHz 量级,通过电光调制器(Electro-Optical Modulator,EOM)对本地激光进行相位调制,产生一个主激光及两个边频激光。被分光后,强光部分 (包括主激光及边频激光) 通过望远镜传递至远处航天器,弱光部分 (包括主激光及边频激光) 与接收到的激光进行干涉。从而,在星载时钟倍频之后,被放大的噪声也被探测器探测,并记录在相位数据里。为了在探测器上观察到明显的边带拍频信号,远端航天器与本地航天器的调制频率应该相差几MHz。LISA 计划由于发展较早,在时钟噪声传递方面,已完成地面的原理方案验证和各类噪声的建模与消减[17-20]。
国内由于起步较晚,对于时钟噪声传递的研究还处于初步阶段,目前尚无相关研究报道。太极计划的总体方案和LISA 类似,但由于光路系统设计、臂长和轨道不同,导致时钟噪声传递的参数设计(倍频系数和差频)需要进行地面验证。本文分别通过电子学和光学实验对太极计划星间时钟噪声传递的原理进行验证。全文安排如下:第二节主要介绍太极计划时钟噪声传递的需求以及具体的实施方案;第三节介绍电子学实验,分析在没有引入光学系统时的时钟噪声,用于验证相关参数设置并分析系统极限灵敏度;第四节是光学实验,将时钟噪声通过EOM 调制进入激光束,完成光学时钟噪声传递,以对方案进行原理验证。
2 需求与方案
2.1 时钟噪声传递需求
太极计划拟利用星间激光外差干涉技术测量测试质量之间的微小位移,测量的精度 ∆l需要达到1 pm/Hz1/2,对于波长 λ=1 064 nm 的激光,对应的相位误差为:
由于轨道相对运动的多普勒效应,干涉信号会产生5~25 MHz 大范围的频率波动。相位计在对以上信号进行测量时,由于采样时钟的抖动,会产生采样误差,即时钟噪声。为使测量精度达到太极计划的要求,时钟采样产生的相位误差 ∆ϕ需小于2π×10-6rad/Hz1/2。根据以下公式可得到对应的时钟计时误差要求[15]:
但目前并无满足此要求的星载超稳时钟,需利用一定的技术手段进行噪声抑制。对于单颗卫星,一般采用时钟同步的方式,即对于不同相位计通道采用同一时钟进行采样,可消除采样共模的时钟噪声。对于相距百万公里量级的卫星,拟采用边带倍频时钟噪声传递方案,将在下一节重点讨论。
2.2 时钟噪声传递方案
图1 为时钟噪声传递方案的原理图。基本思路是将倍频后的时钟通过EOM 调制到激光的相位上,产生一个主激光及两个边频激光。为了有效抑制高阶边带拍频信号,通过调节调制指数(相位调制深度)来控制边频激光的功率,使其不大于主激光的 1/10。被分光后,强光部分通过望远镜传递至远端航天器,弱光部分与接收到的激光进行干涉。探测器可以探测到的拍频信号包含有载波拍频和两个边带拍频,时钟噪声信号就隐藏在边带拍频信号中[13,15]。
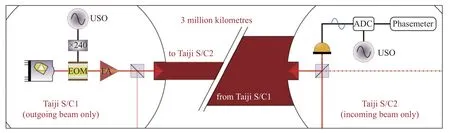
图1 时钟噪声传递原理图Fig.1 The principle diagram of clock noise transmission
在接收端,航天器对相位调制之后的激光信号,按照Bessel 函数展开可以得到(选取合适的调制指数m,使高阶边带的幅值可忽略):
其中,Jn(m) 表示第一类n阶Bessel 函数;fc为激光的频率;n1为本地航天器的倍频系数;fuso为USO 的工作频率;ϕ1(t)为本地航天器时钟的相位噪声。接收端航天器四象限探测器(Quadrant Photodiode,QPD)收到拍频信号之后,利用相位计提取载波拍频信号和边带拍频信号。
Bessel 函数展开远端航天器调制后的激光信号,如式(4)所示:
其中,n2为本地航天器的倍频系数;ϕ2(t′)为远端航天器时钟的相位噪声。
由于卫星之间的相对运动,根据多普勒效应,可以知道t’=kt,所以接收端接到的光束为,
两束激光干涉,经过光电探测器后得到拍频信号。其中,载波拍频
由于航天器之间的相对运动并不是匀速运动,系数k会随速度的变化而发生微小变化,故上边带拍频:
从上下边频的结果可以看出,除干涉信息外,边频主要由倍频后的时钟噪声构成。倍频的主要目的是放大时钟噪声,降低其余信息对时钟噪声测量的影响。对于5~25 MHz 的主干涉信号,为了在探测器上能观察到明显的边带拍频信号,远端航天器与本地航天器的调制频率一般相差几MHz,调制频率相差太大会增加两个倍频系数n1和n2之间的差异,即[n1ϕ1(t)-n2ϕ2(t)]/n1≈ϕ1(t)-ϕ2(t)不成立。本文对于工作频率为10 MHz的USO,本地拟倍频至2.4 GHz,远端航天器的倍频至为2.401 GHz,即二者相差1 MHz,相应的时钟频率放大约240 倍。
为使边带激光功率不大于主激光功率的1/10,图2(彩图见期刊电子版)给出了边带激光功率与主激光功率比值随调制指数m的变化曲线,实线是对应的Bessel 函数(虚线)的平方,表示激光功率。
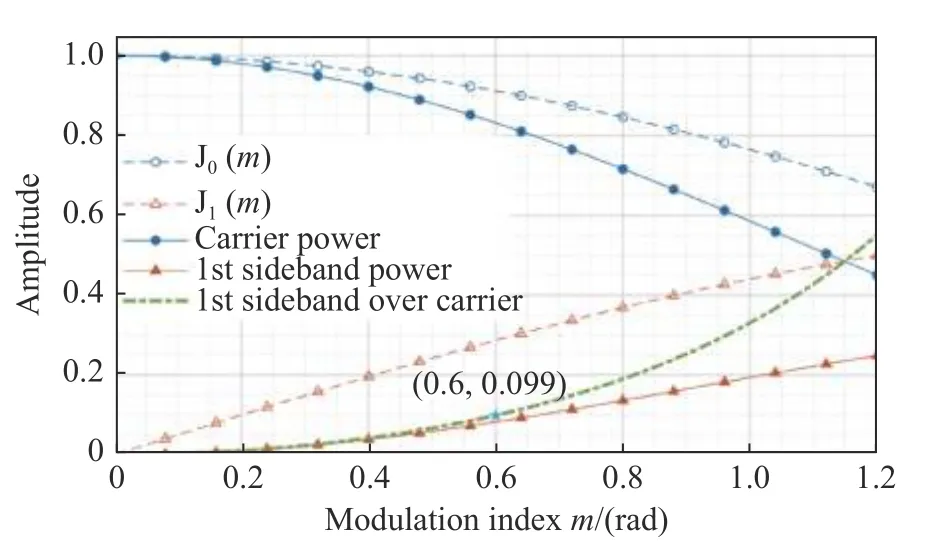
图2 激光功率比和调制指数m 的关系Fig.2 The relationship of power rate and modulation index m
从图2 可以看出,用于干涉测量的激光载波随着调制指数的增加,功率降低。反之,用于时钟噪声传递的边频随着调制指数的增加,功率增加。边带和载波的激光功率比值随着指数的增加而增大。从图2 可得,当调制指数m≤0.6 rad 时,可以满足光强小于载波功率十分之一的要求。
为验证时钟噪声传递方案和相关参数的合理性。首先,搭建电子学实验,确立参数的有效性,并测量得到系统的极限灵敏度。其次,搭建光学实验,利用EOM 将调制信号相位调制到激光载波上,两束激光干涉得到相应拍频信号,利用相位计分析验证边带倍频传递方案的原理正确性。
3 电子学实验
3.1 实验方案
实验方案原理框图如图3 所示。Clock1 和Clock2 代表不同航天器的时钟,Sig1 和Sig2 为各自航天器的待测信号,PM1 和PM2 为信号测量设备相位计[21],采样频率为80 MHz。不同航天器间的时钟噪声体现在两个方面:(1)同一信号用不同航天器相位计测量时的误差;(2)不同航天器产生的相同频率信号,采用同一相位计测量时的误差。即在不同航天器下评价信号,或产生相同信号时所带来的误差,主要由产生或评价信号的时钟导致,两者等价。本文为避免不同相位计所产生的数据时间同步问题,重点讨论情况(2),即同一相位计评价不同航天器的相同频率信号所产生的时钟误差及消除。

图3 电子学实验原理框图。表示相位计PM1 的j 通道对信号i 的读出,表示相位计PM2 的j 通道对信号i 的读出(i=1,2;j=1,2,3,4)Fig.3 Schematic diagram of the electronic experiment.resents the readout of signal i by the j channel of the phasemeter PM1, represents the readout of signal i by the j channel of the phasemeter PM2 (i=1,2;j=1,2,3,4)
设定USO 的工作频率fUSO=10 MHz,本地航天器时钟倍频调制频率f1=2.4 GHz,远端航天器倍频调制频率f2=2.401 GHz。相位计PM1 测量单个航天器的10 MHz 信号间的相位差,即通道噪声,如下式所示:
由于单一航天器是在相同的时钟体系下运行的,所以相位计的通道噪声不包含时钟噪声,可表示系统测量的极限水平,在时钟噪声消除后作为参照。
PM1 测量的不同航天器的10 MHz 信号,记为:
此时,δψ1,1含有两个系统时钟带来的测量差异,作为本文时钟噪声消除的对象。
根据第二部分的讨论可知,实际传递的是倍频后的时钟信号,通过将时钟信号倍频传递至远端航天器,测量其与远端倍频信号的倍频时钟噪声。即2.4 GHz 和2.401 GHz 混频之后的1 MHz差频信号,相位计PM1 测得的时钟噪声δψ1,2记为:
其中n(n=n1≈n2)表示倍频系数。经倍频后,时钟噪声扩大n倍,且成为主要噪声。后经数据处理,可消除 δψ1,1中时钟噪声部分,如下式所示,
根据以上原理,搭建电子学实验系统实物图,如图4 所示。图中:左侧信号发生器(Stanford Research Systems SG384)和16 通道相位计用同一个时钟体系,模拟航天器1;右侧信号发生器和16 通道相位计共用另一个时钟,模拟航天器2。

图4 电子学实验硬件实物图Fig.4 The hardware device picture of electronics experiment
3.2 结果与讨论
实验结果如图5(彩图见期刊电子版)所示。从图5 可以看出,在相同的时钟下,相位计的通道噪声较小(上三角标记曲线),能够满足太极计划的需求。但高频信号发生器SG384 在0.12 Hz 及其倍频处有很高的峰值存在,而信号发生器33500B(KEYSIGHT)的通道噪声(下三角标记曲线)则没有,说明0.12 Hz 处的峰值是来源于SG384 自身的相位噪声。相位计测量不同时钟体系下的信号(蓝色虚线)得到时钟噪声,对比通道噪声曲线可以发现,此时时钟噪声较大,且呈现1/f 的特性。倍频2.4 GHz 和2.401 GHz 混频后为单独测量得到的倍频时钟噪声(红色点线),与时钟噪声相比,曲线形状相似,说明时钟噪声为主导。共模消减后(黄色点划线),能够消除时钟噪声的影响,对比时钟噪声(蓝色虚线)下降约一个量级,且在0.05 Hz~1 Hz 频段内噪声优于2π×10-5rad/Hz1/2,验证了时钟噪声传递的有效性。与通道噪声相比可知,经时钟噪声传递后,仍未达到理想水平。主要原因有以下两点:(1)GHz 信号传输未进行噪声抑制。倍频GHz 信号在传输过程中,更易受到环境的干扰,但实验中并未做特殊处理,是未来时钟噪声传递噪声的主要来源和抑制对象。(2)相位计通道噪声。通道噪声包括前端模拟电路噪声等,对于通道噪声,可通过通道间的共模噪声抑制消除,但倍频后的时钟噪声测量仅仅是单通道结果。因此,通道噪声也是本文噪声的主要来源之一。未来将引入相同频率的信号进行共模噪声抑制,进一步消除通道间的噪声。
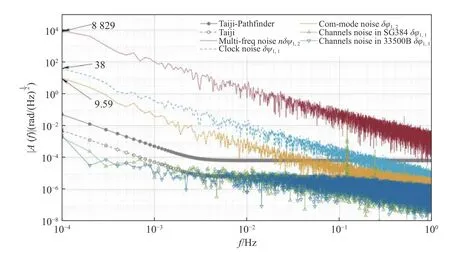
图5 电子学实验的典型结果Fig.5 Typical results of electronics experiment
4 光学实验
4.1 实验方案
在电子学相关参数设置的基础上,将时钟倍频噪声调制至激光相位中,通过激光束代替线缆进行噪声传递是光学实验的基本思路。原理框图及实物图如图6~图7 所示。Nd:YAG 固体激光器(Coherent Mephisto 500FC)产生的1 064 nm 激光束经光纤分束后分别通过两个声光调制器(Acousto-Optic Modulator,AOM)产生15 MHz差频(5~25 MHz 任意设定)。之后,分别经过相应的EOM(iXblue,NIR-MPX-LN-10),EOM 通过信号发生器的倍频信号驱动,频率分别为2.4 GHz和2.401 GHz。此时经过EOM 的光束,已调制相应的倍频时钟信息。两EOM 光束经光纤合束产生干涉信号,干涉信号由主频15 MHz 和两个边频14 MHz、16 MHz 组成,如图8 所示。干涉信号经光电探测器转换为模拟电压信号,由相位计进行相位计测量。所用信号发生器和相位计与电子学实验相同。
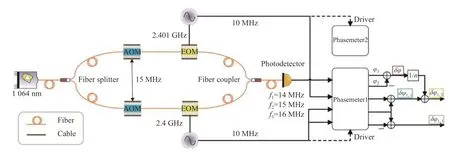
图6 光学实验原理图Fig.6 Schematic diagram of optical experiment
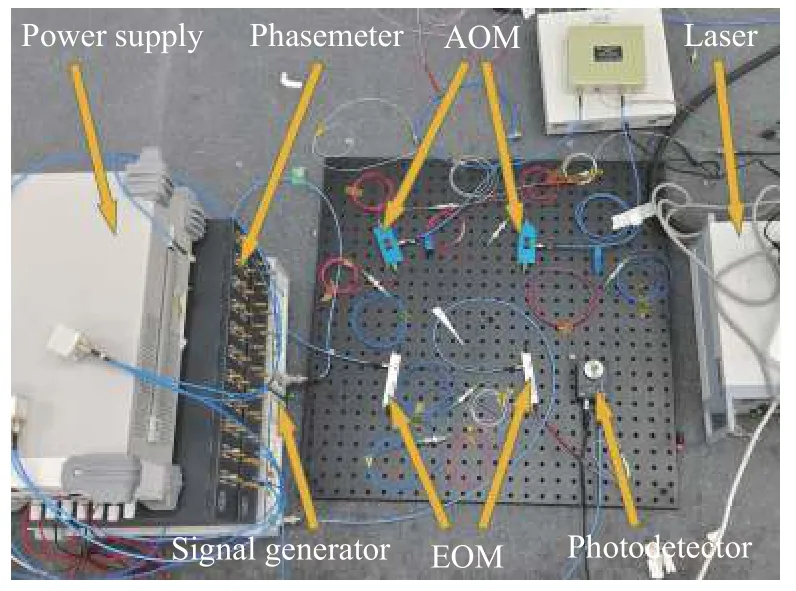
图7 光学实验硬件实物图Fig.7 The hardware device picture of optical experiment
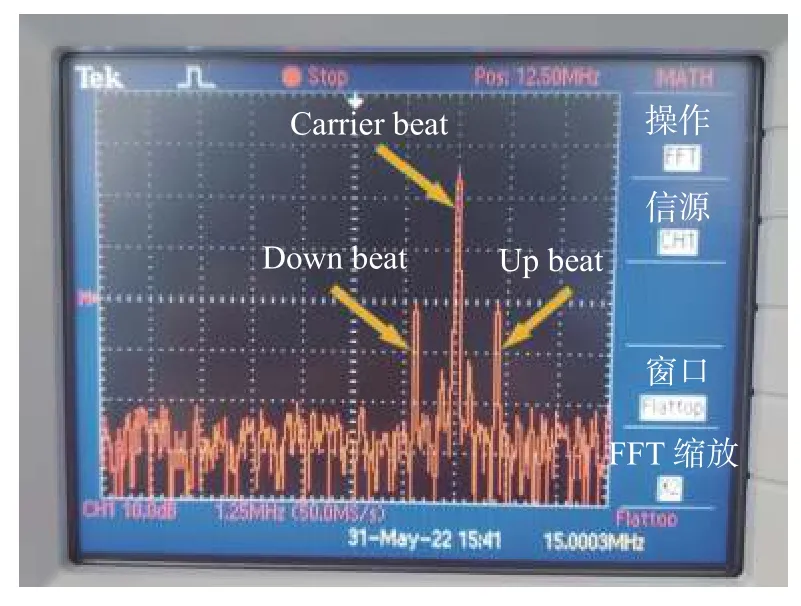
图8 拍频信号频谱图Fig.8 Spectrogram of beat frequency signal
主频信号反映主干涉信号的相位波动信息,两个边频为倍频时钟的噪声。与电子学实验相同,对比同一相位计对不同时钟下的信号解析带来的时钟噪声。电子学实验采用模拟信号进行时钟噪声传递,而光学实验通过EOM 边带倍频的方法传递。
4.2 结果与讨论
光学实验典型结果如图9(彩图见期刊电子版)所示。图9 结果与电子学的实验结果相似。在相同的时钟下,相位计的通道噪声最小(上三角标记曲线)。相位计测量不同时钟体系下信号(蓝色虚线)得到的时钟噪声较大,呈现1/f 的特性。通过倍频2.4 GHz 和2.401 GHz 经EOM 传输干涉后的边带倍频时钟噪声(红色点线)最大,其与时钟噪声曲线形状相似。共模消减后(黄色点划线),能够显著消除时钟噪声的影响。且下降约一个量级,在0.05 Hz~1 Hz 频段内噪声优于2π×10-5rad/Hz1/2,进一步验证了光学EOM 倍频时钟噪声传递的有效性。同时对比电子学结果,抑制后的噪声基本在同一水平,说明光学传递方案达到和电子学相同的效果,原理方法及参数有效。但仍然与通道噪声曲线有着较大的差距。主要原因除电子学实验部分讨论的两点,光学实验仍存在额外问题:(1)光学边频的频率为14/16 MHz,相对于1 MHz 的模拟信号,存在更大的前端模拟噪声。虽然信号中GHz 的时钟噪声占主导,但后期进一步提高精度时,需要考虑14/16 MHz 带来的噪声问题,尝试引入共模噪声抑制光路。(2)EOM 晶体更易受到环境的影响。相对于电子学的GHz 信号,EOM 调制的光学GHz 信号更易受到环境,特别是温度的影响,表现为低频噪声更大(˂10 mHz)。LISA 在不同的验证实验中,均对EOM 带来的噪声进行了重点讨论,这也是今后研究的重点问题之一[14]。
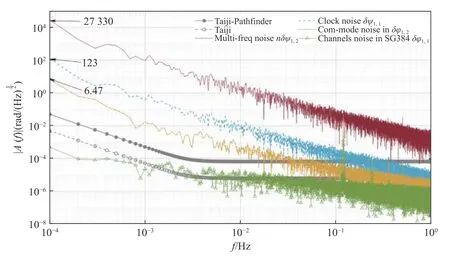
图9 光学实验典型结果Fig.9 Typical results of optical experiment
综上所述,本文提出拟将时钟倍频至2.4 GHz,经EOM 调制至激光束中,经望远镜传递至远端航天器,并与远端倍频至2.401 GHz 时钟调制激光束进行干涉,进而测量得到航天器间的时钟噪声。经数据后处理,最终将不同时钟引起的测相误差消除。通过较小的EOM 调制深度(≤0.6 rad),用于时钟噪声传递的激光束约占激光光强的10%以内,在不影响主干涉测距信号的前提下,完成星间的时钟噪声传递。经电子学与光学实验分析可知,整体方案合理可行,初步的实验结果在0.05 Hz 频段以上,优于2π×10-5rad/Hz1/2,满足太极探路者需求。
5 结论
为减少由不同航天器超稳时钟不同所带来的测相误差,太极计划拟通过时钟噪声传递的方式,将本地航天器的时钟误差传递至远端航天器,通过测量得到两个时钟的误差,后采用数据处理的方式将时钟噪声消除。本文主要进行了太极计划时钟噪声传递的原理和方法学验证。从电子学实验和光学实验两个方面分别阐述由不同时钟带来的测相误差,及其消减后的效果。实验结果表明,光学和电子学的时钟噪声消减效果一致,在0.05 Hz~1 Hz 频段内优于2π×10-5rad/Hz1/2,满足太极探路者需求。主要噪声来源于GHz 信号的传输噪声、相位计的通道噪声及EOM 的环境扰动等。本文的研究验证了太极计划边带倍频时钟噪声传递方案的可行性,为未来太极计划的时钟噪声传递参数设计奠定了实验和理论的基础。
本文为避免两个相位计的数据同步问题,主要讨论同一相位计对不同时钟信号测量的时钟噪声。太极计划中,不同航天器间相位计的情况仍需要进一步讨论。此时,由于相位计间采样的不同步,则需引入TDI 技术,针对测量得到的不同数据进行插值、时间移位对准。两个相位计因时钟不同带来的时钟噪声也是未来的重点研究方向之一。
猜你喜欢
量子电子学报(2022年2期)2022-04-16
量子电子学报(2022年1期)2022-02-25
量子电子学报(2021年5期)2021-10-23
量子电子学报(2021年2期)2021-04-24
济南大学学报(自然科学版)(2019年4期)2019-07-30
雷达学报(2018年1期)2018-04-04
大庆师范学院学报(2015年3期)2015-12-24
中国光学(2015年5期)2015-12-09
电视技术(2015年13期)2015-10-12
现代防御技术(2014年5期)2014-02-28