
激光雷达原理演示实验装置的设计与研发
2023-11-30 10:23徐丹阳何正才叶震辉蒋曹羽
浙江工业大学学报 2023年6期
徐丹阳,何正才,叶震辉,蒋曹羽,鄢 波
(浙江工业大学 理学院,浙江 杭州 310023)
20世纪60年代初,科学家就提出了激光雷达的概念。激光雷达探测技术是将激光、计算机和高速信息处理等技术相结合的高新技术,能够主动、快速和精确地获取地表或大气三维空间信息,美国国家大气研究中心首次将其应用在气象学上来测量云[1]。随着科学技术的不断发展以及实际需求的不断细分,激光雷达根据工作方式不同可分为机械式激光雷达、固体激光雷达和量子激光雷达等[2];根据搭载平台不同可分为星载激光雷达、机载激光雷达、车载激光雷达和地基激光雷达等[3-4]。激光雷达的应用领域有大气探测[5-6]、无人机[7-9]、机器人[10-11]、自动驾驶[12-14]及工业应用等。激光雷达技术虽然应用越来越广泛,但是在实验教学方面应用较少,笔者通过激光雷达实验,设计研发了激光雷达原理演示实验装置,使激光雷达能更好地推向实验教学,加深学生对激光雷达基本原理的了解及应用。该装置的优势在于激光雷达可以±30°水平旋转及前后伸缩,用于验证激光雷达360°检测和激光测距;多场景板的设计,用于验证不同环境下激光雷达辨别不同目标物的能力。笔者装置能够实现如下实验:1) 目标物测量,包括位置、相对位置和外形等;2) 雷达分辨率的理解,垂直和水平角分辨率;3) 不同距离下分辨目标物能力;4) 了解激光雷达计算目标空间坐标的算法等。
1 基本原理
激光雷达测距的基本原理是通过测量激光发射和反射回来之间的时间,即飞行激光的时间来计算目标的距离。根据不同激光的发射信号,可分为脉冲法激光测距和相位法激光测距[15-17]两种类型。
1.1 脉冲方法
脉冲方法是指激光雷达发射一束激光,一部分激光被测量物反射回,并被激光雷达的接收器接收,激光雷达记录发送和接收之间的时间间隔,根据光速计算得到测量距离。具体计算式为
D=CT/2
(1)
式中:D为探测距离;T为飞行时间;C为光速。
1.2 相 位 法
相位法是将连续激光信号进行幅度调制,调制光的幅度随时间发生周期性变化,测量调制激光发射与反射的相位变化即可得出时间与距离。激光雷达(LiDAR)在一个特定速度下做匀速转动,并连续发射红外激光,同时接收反射点的激光信号,包括反射点距离、时间及水平角度等,一个发射器对应一个垂直角度,利用这些变量数据可以获得相应反射点的位置信息。激光雷达旋转360°收集到的所有反射点坐标的集合就变成点云,从而得到全方位的环境信息。
坐标映射如图1所示。根据垂直角度、水平角度和距离等参数,在极坐标中得到的数据变换为右手笛卡尔坐标系(x,y,z)下的信息,转换关系表达式为
(2)
式中:r为距离;ω为垂直角度;α为水平旋转角度。

图1 坐标映射Fig.1 Coordinate mapping
2 仪器设计
实验装置示意图如图2所示。图2中:1为仪器控制盒用于实现激光雷达的开、关及改变角速度等。3为激光雷达设备主体,由红外相机、调节平台(三维)和激光雷达构成,其采用脉冲式激光测量距离,包含16条红外激光发射线,频率为5~10 Hz,垂直分布角为-15°~+15°,绝对精度<5.00 cm,垂直角分辨率示意如图3所示,其由厂家给出,激光线束与对应角度如表1所示。激光雷达和红外相机装在三维调节平台上,调节平台可上下、前后15.00 cm调节,可向左向右各调节30°,调节精度5°,主体示意图如图4所示,实物图如图5所示。红外相机的拍摄波长范围是可见光905 nm,可以将人眼不可见的905 nm光线可视化,使得演示效果清晰可见。5为被测量样品,可根据实验内容自行挑选材料设计外形,形状可以是三角形、正方形、长方形或椭圆形等,材料可以是塑料、布、纸或金属等。7为烟雾产生器,可调节烟雾颗粒大小及烟雾浓度,用于研究激光雷达在恶劣环境下识别物体形状及大小的能力。6为置物台,由上下两个部分组成,单独使用时可插入一些薄板,组合使用时可放置各种形状的物体。2为计算机,用于运行激光雷达演示装置的运行软件,分析实验现象。4为多场景模拟板,采用插拔式设计,可将纸片或塑料等裁剪好的目标形状固定在表层为软木的模拟板上,其特点是一张模拟板对应一个测试环境,设计轻巧,制作灵活,操作方便,随时可以制作模拟测试环境。
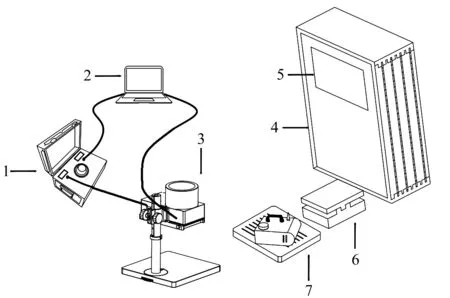
图2 仪器示意图Fig.2 Schematic diagram of instrument
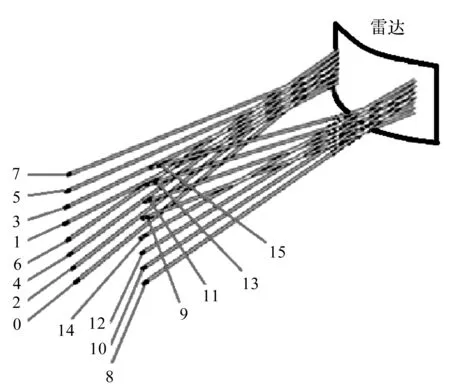
图3 垂直角定义示意图Fig.3 Schematic diagram of vertical angle definition

表1 激光线束与对应角度
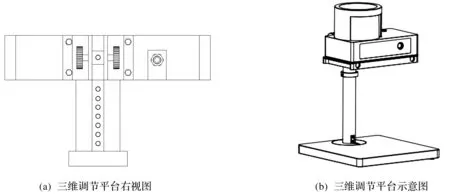
图4 激光雷达实验仪主体示意图Fig.4 Schematic diagram of the main body of the LiDAR experiment instrument

图5 激光雷达实验仪主体实物图Fig.5 Physical diagram of the main body ofthe LiDAR experiment instrument
3 实验结果与分析
用笔者实验装置进行了其中3个有关激光雷达原理演示实验装置的实验:距离探测、物品形状识别和垂直角分辨率测量。利用激光雷达生产厂家配套的软件进行软件操作,从而获得相应的图片及数据。
3.1 距离探测
激光雷达采用脉冲法测量距离,即根据激光的飞行时间得到障碍物的位置信息。将多场景模拟板正对激光雷达实验仪主体(激光雷达中心点)98.00 cm处放置,打开激光雷达测量软件,在强度模式下观察彩色点云图,点云图的颜色分布会随物体反射强度不同而随之改变。如果激光雷达发出的16条线激光没有全部落在场景模拟板上(打开红外相机进行观察),投影图如图6所示。首先,调节三维调节平台右侧手轮使激光雷达上下移动到界面中心位置显示16条线激光时拧紧左侧手轮;然后,左右移动三维调节平台底座,使场景模拟板上的点云图中心线与轴坐标线重合;最后,前后微调三维调节平台底座,确保激光雷达与场景模拟板之间的距离为98.00 cm,最终显示界面如图7所示。
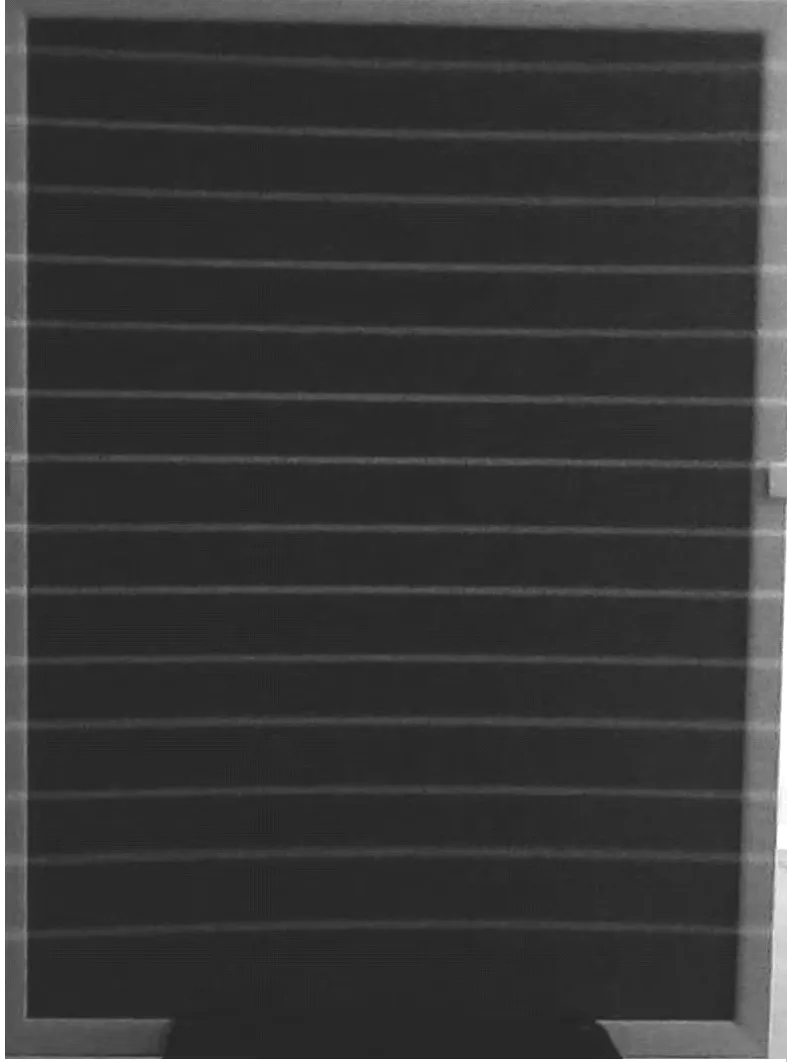
图6 激光雷达投影图(14线)Fig.6 LiDAR projection (14 lines)
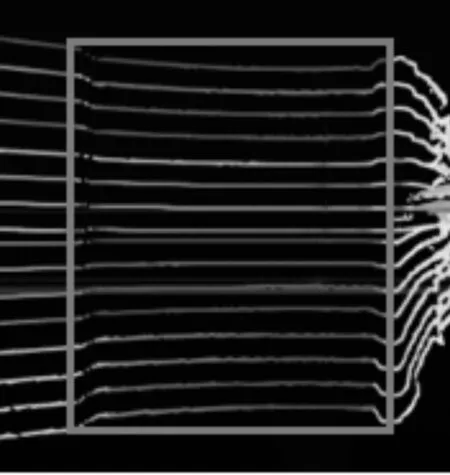
图7 激光雷达投影图(16线)Fig.7 LiDAR projection (16 lines)
通过改变三维调节平台前后距离臂使激光雷达中心点与目标物之间的相对距离,首先让臂每次往前伸2.00 cm;然后让臂往回缩2.00 cm,每次改变相对位置后在软件界面上读取距离数据值(垂直角度为1°或-1°),距离探测数据如表2所示。由表2可以看出:测量绝对误差符合激光雷达本身绝对精度参数,测量相对误差在2.0%以内。数据显示误差为正偏差,可能是激光雷达在安装时中心没有与仪器中心完全重合,往前偏了一点,后期生产加工时需要提高器件的加工及安装精度。

表2 距离探测数据
3.2 物品形状识别
实验物体和多场景模拟板对光的反射率不同,激光雷达接收到的反射光强度也不同,在激光雷达控制软件强度模式下彩色点云图中显示的画面可以得到被测物品的轮廓。使用反射率较高的材料做成三角形、矩形和椭圆等图形固定在覆盖黑色绒布的多场景模拟板上,实物图如图8所示,得到的探测图如图9所示。

图8 物品图片Fig.8 Objects pictures

图9 物品识别图片Fig.9 Objects identification pictures
由图9能够基本辨识实验物体的外形轮廓,为了得到更加清晰的图形轮廓及实验教学拓展资料,可以让学生使用Python对图形进行特征提取。利用Python中的OpenCV对图像作进一步的处理,通常对颜色空间的图像有效处理是在HSV(Hue saturation value)颜色空间实现的,对于基本色中相应的HSV分别给出一个严格的范围。HSV的3个字母分别代表色调(Hue)、饱和度(Saturation)和明度(Value)。首先,使用OpenCV中的Imread函数读取图像并以Mat类存储;然后,使用CvtColor函数将图像从RGB颜色空间转换到HSV颜色空间;最后,通过对照HSV参考表,对想要提取的颜色指定HSV的3个值的范围,使用InRange函数对指定颜色进行提取,处理后的结果如图10所示。由图10可以清晰地看到被测物体的形状包络线以及与多场景模拟板的分界线。
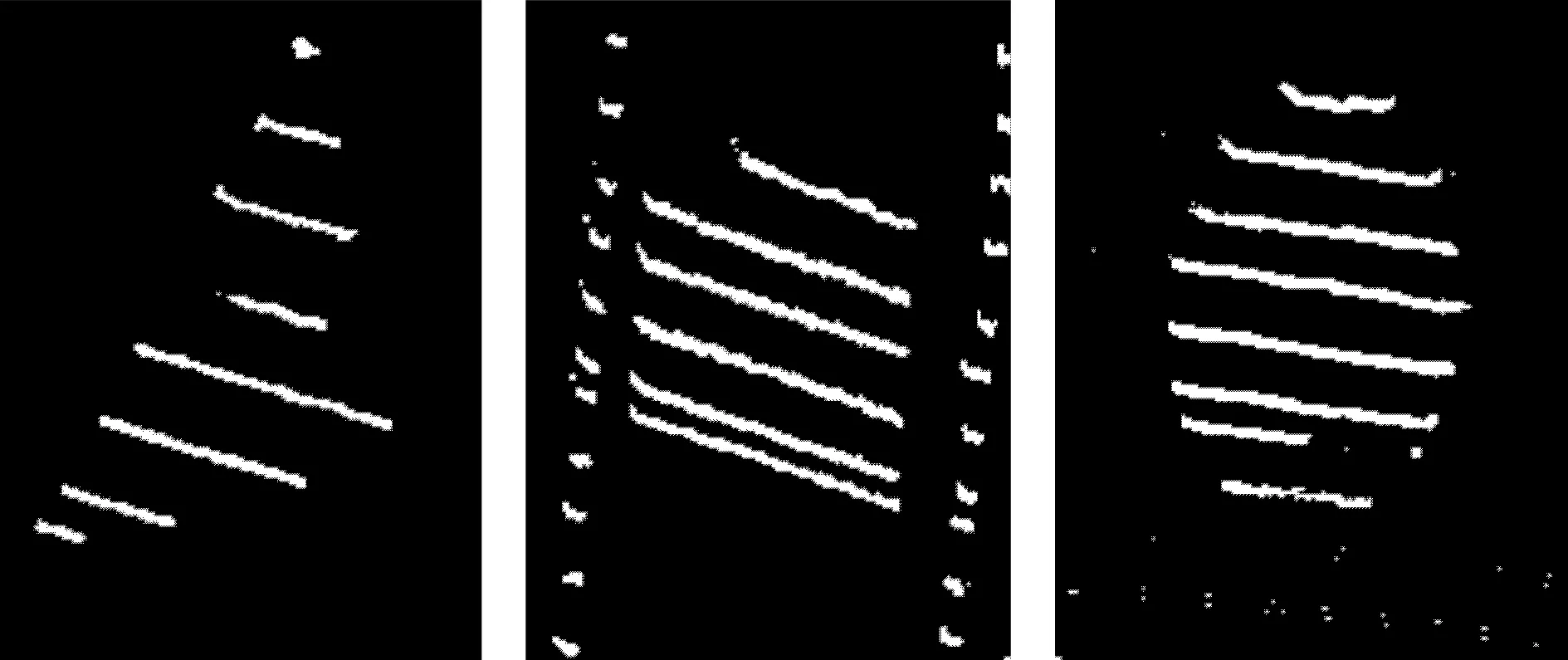
图10 经Python提取特征后的图形Fig.10 The graph after extracting features by Python
3.3 垂直角分辨率测量
评判多线机械激光雷达性能有多个重要指标,其中垂直角分辨率是反映激光雷达反应能力的重要参数,角分辨率越小,激光点云数据密度越大,激光雷达对外部环境的反应效果就越强。实验中用到的激光雷达线排列如图3所示,每个发射器间隔为2°(即垂直角分辨率)呈上下对称排列。垂直角分辨率测量实验中,在某一固定距离下垂直角分辨率的测量可通过如图11所示的方法测量获得。
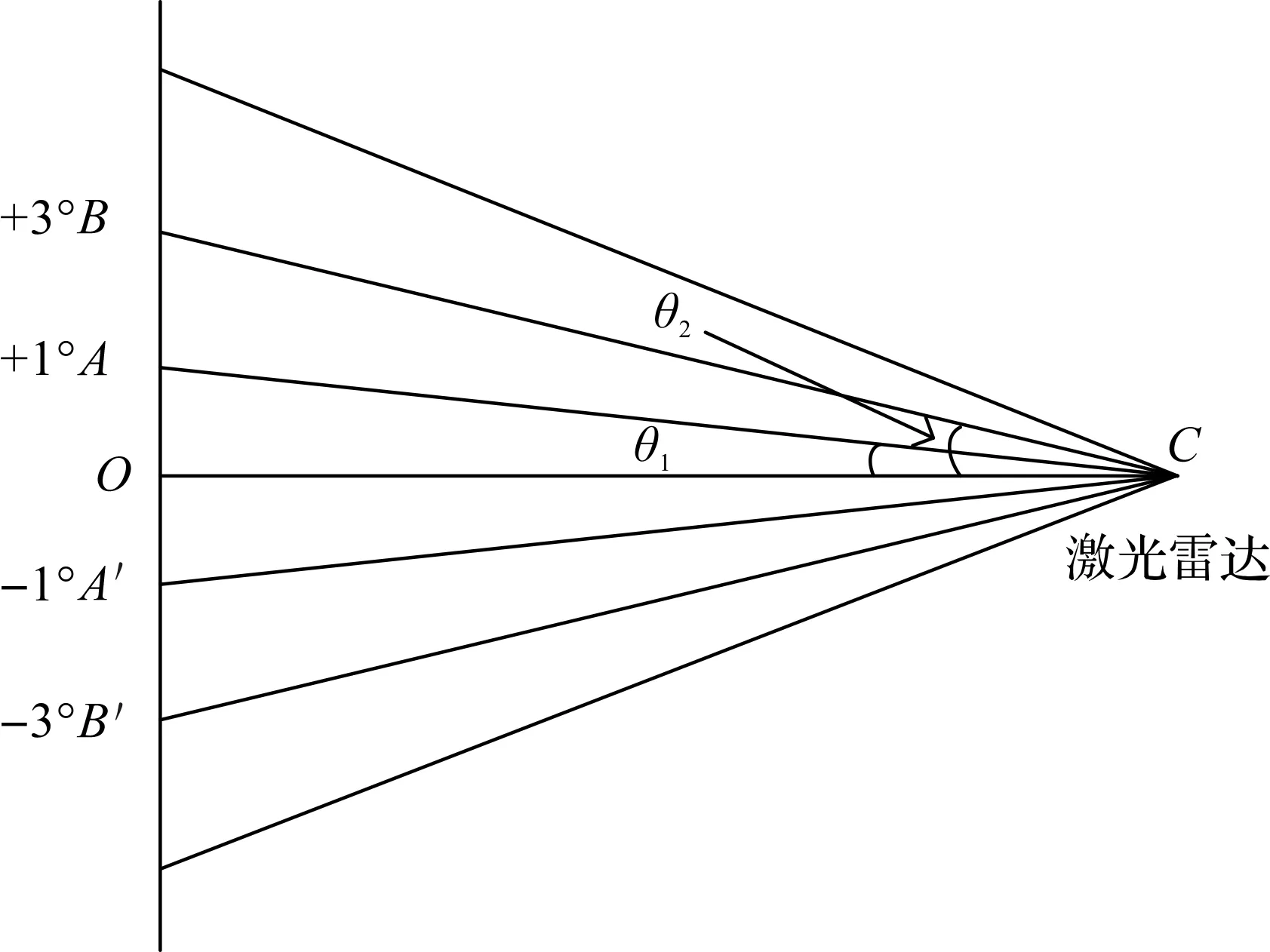
图11 垂直角分辨率测量说明Fig.11 Measurement instructions for verticalangular resolution
由于激光雷达原理演示实验装置中选择的激光雷达没有0°出射激光,因此在垂直角分辨率测量过程中需要经过换算得到,举例为
(3)
式中:A为+1°激光出射光线与多场景模拟板的交点;B为+3°激光出射光线与多场景模拟板的交点。
(4)
式中OC为激光雷达中心点到多场景模拟板的距离。当θ角小于5°时,式(4)可以简化为
(5)
通过以上分析,可以得出垂直角分辨率计算式为
θ=θi+2-θi
(6)
在激光雷达测量软件界面中,首先分析Y视图下正交视图中各对称角度点云图,从而得到激光雷达垂直角分辨率参数,实验测得的图像如图12所示;然后点击软件中测量长度的控件,开始测量对称角度点云的距离,从1°开始依次测量每组的距离,数据记录在表3中;最后分析表中数据,可知垂直角分辨率绝对误差最大为0.4°,最小为0.1°,对应的相对误差分别为20%和5.0%。
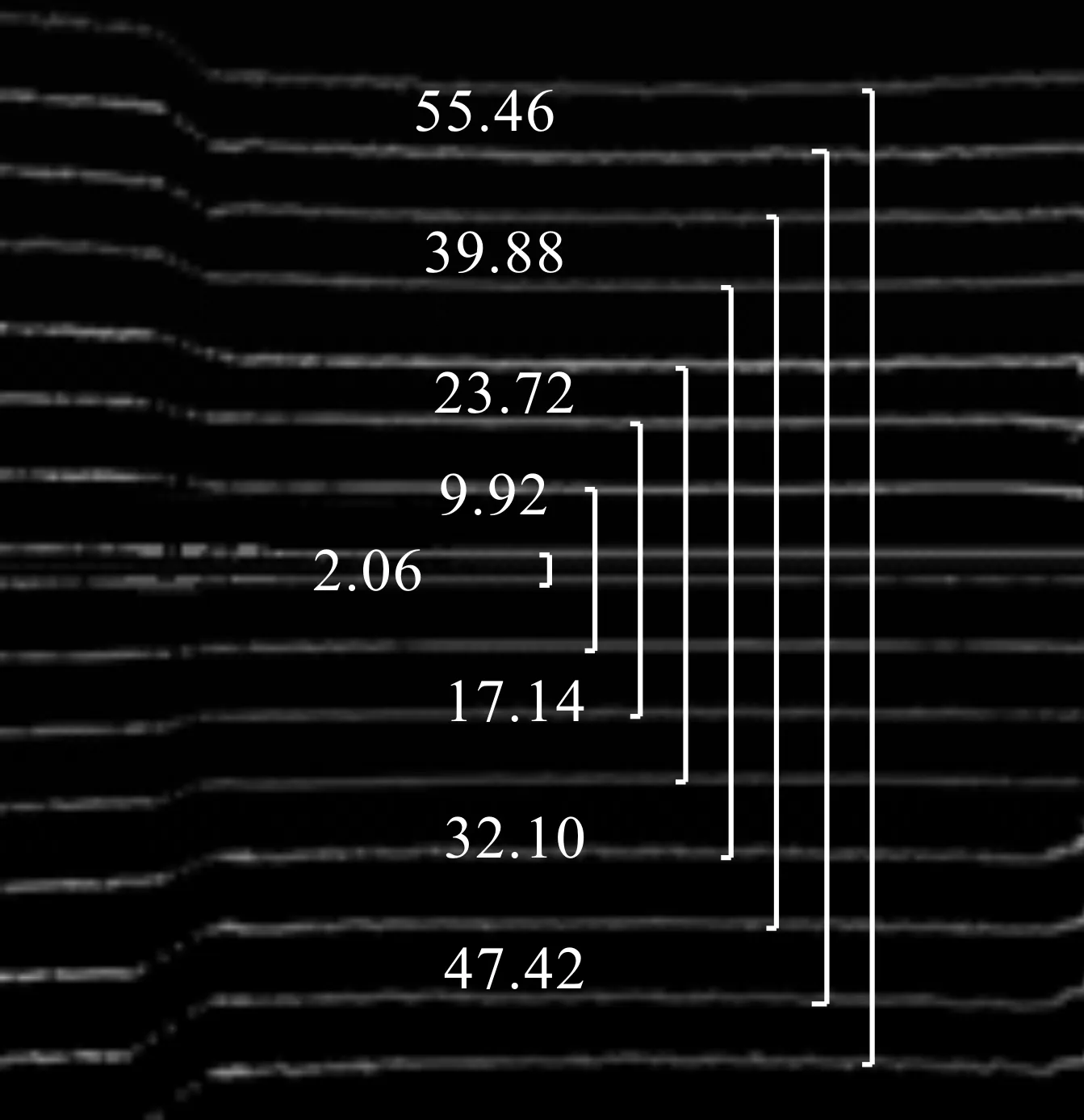
图12 垂直角分辨率测量说明Fig.12 Measurement instructions for verticalangular resolution

表3 垂直角分辨率测量数据(98.00 cm)
4 结 论
通过实地调研及理论知识学习,设计并研发了激光雷达原理演示实验装置。采用三维调节平台,保证激光雷达立体空间实验能力,帮助学生理解其原理及掌握分析仪器性能。多场景模拟板的设计,便于模拟激光雷达在不同环境下的工作状况,如目标识别和距离探测等。通过改变三维调节平台伸缩臂的距离,验证了激光雷达探测距离的性能,误差在2.0%以内。该设备提供了立体的调节尺度,不同的模拟场景装置,其操作简单,现象生动,实验内容丰富,能够很好地演示激光雷达的工作原理。在实验教学中,不仅能够帮助学生加深对激光雷达工作原理的理解以及掌握主要性能参数指标,而且可以提高学生的综合实验能力。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
汽车维修与保养(2021年8期)2021-02-16
数学物理学报(2019年3期)2019-07-23
中国交通信息化(2019年1期)2019-03-26
家庭影院技术(2018年9期)2018-11-02
电子制作(2018年16期)2018-09-26
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
