
基于行波能谱矩阵相似度的特高压直流控制保护方法
2023-11-30 09:48:34刘世岩冯旭阳崔童飞王心蕊
电气技术与经济 2023年8期
刘世岩 冯旭阳 崔童飞 李 泽 王心蕊
(国网河北省电力有限公司电力科学研究院)
0 引言
特高压直流电网已经被广泛的应用, 但是其经常发生故障问题, 所以需要对其进行控制保护。但目前的特高压直流控制保护方法通常只能进行大致的特高压直流控制保护, 既耗费了资源又没有良好的控制保护效果。而传统的特高压直流控制保护方法针对特高压直流控制保护, 不能对其具有良好的控制保护效果。基于PWM 的特高压直流控制保护方法对特高压直流控制保护采用了故障定位, 但是并没有提高控制保护的效果。为了可以有效提高对特高压直流控制保护的效果, 提出了基于行波能谱矩阵相似度的特高压直流控制保护方法。
1 确定行波时频原始特征
特高压直流输电线路在故障时会因为电线的正负极之间的耦合发生故障, 在发生故障之前需要先确定行波时频的原始特征, 用来分辨其是否为故障状态。根据特高压直流初始状态来计算线模电压初始的行波幅值[1], 再对线模电压的单、双极接地初始的行波幅值进行计算, 测量线模电压的反行波进行对行波时频原始电压幅值的计算, 公式如下所示:
式中,U1为线模电压的反行波值,U1(x) 为在x处的线模电压的反行波值,e-γ1x为电压的传输函数,Uc为行波时频原始电压幅值,γ1为电压的线模传播系数,r为线路单位长度的电阻,l线路单位长度的电感,g为线路单位长度的电导,c为线路单位长度的电容, 其中线路单位长度的四个数值都与频率有关。
2 提取特高压直流故障特征
通过上述的行波时频的原始特征来提取特高压直流故障特征。先采集电压离散信号, 根据局部时频分析方法对电压电线进行离散信号的采集, 对采集到的离散信号进行变换, 得到一个离散信号矩阵, 其中矩阵的行为频率序号[2], 矩阵的列为离散时间点, 根据矩阵中的各个元素可以得到模时频矩阵, 用D来表示, 根据D矩阵可以得到特定时刻的采集信号能量谱密度, 公式如下所示:
式中,E(i,j) 为在第i个频率时的第j个采样时刻的采集信号能量谱密度,D(i,j) 为在第i个频率时的第j个采样时刻的D矩阵元素, 然后对其进行平方。
根据在第i个频率时段的第j个采样时刻的采集信号能量谱密度得到特高压直流故障特征频率, 公式如下所示:
式中,fi为特高压直流故障特征频率,fs为采样的直流频率,N为在特定时刻的采集信号能量谱密度矩阵中的第N个数值。
3 基于行波能谱矩阵相似度构造控制保护特征矩阵
结合上述提取的特高压直流故障特征, 基于行波能谱矩阵相似度构造控制保护特征矩阵。基于行波能谱矩阵相似度对特定时刻的采集信号能量谱密度矩阵进行去中心处理[3], 得到协方差矩阵的特定值矩阵和特定向量矩阵, 保护特征主要矩阵公式如下所示:
式中,P为保护特征主要矩阵,μ为协方差矩阵的特定向量矩阵。提取保护特征主要矩阵的前两列可以作为特高压直流故障特征的矩阵, 记为C。
因为特高压电流的故障类型可以分为正、负极接地短路和双极均短路, 所以可以根据计算故障时的第一个时间点的直流电压反行波, 根据第一个时间点的直流电压反行波计算出故障发生在正、负极接地短路和双极均短路的各能谱矩阵, 三个故障点的能谱矩阵分别为正极能谱矩阵C1, 负极能谱矩阵C2, 双极能谱矩阵C3。根据故障点的三种类型构造整体特高压电流控制保护特征矩阵。为了得到各故障点的故障信息样本, 在线路上设置正极、负极、双极接地故障,分别在控制保护装置的20km 处、30km 处、100km 处设置, 经过分析得到各故障信息的具体情况, 根据分析得到在特高压电流控制保护特征矩阵中, 双极短路在矩阵中有20 种故障样本, 正、负极接地短路在特高压电流控制保护特征矩阵中分别有40 种故障样本[4]。将所有故障样本输入到数据库当中, 可以在特高压电流发生故障时, 针对其故障特点有效进行控制保护。
4 设置特高压直流控制保护启动阈值
根据构造的控制保护特征矩阵设置特高压直流控制保护的启动阈值。控制保护在启动时可能会因为电路的电压波动而产生频繁地误动, 产生误判, 在线路没有故障的时候就启动了控制保护, 产生不必要的消耗, 因此需要设定固定的阈值, 来根据阈值进行对电路的判断, 选择是否开启控制保护机制。在线路保持在正常运行时, 线路能量熵变化量一般是稳定在1 以下, 当线路发生故障时, 线路能量熵变化量一般会在此时超过1[5]。将第一个发生故障的位置时刻作为故障发生时刻得到此时的能量熵变化量波动值, 此时控制保护装置开启。能量熵变化量波动值公式如下所示:
式中, ΔW(m) 为在m时刻的能量熵变化量。因此设置当ΔW(m) >Δs时, 控制保护装置启动, Δs为控制保护装置的启动阈值, 将其取值为2[6]。能量熵变化量波动值与特高压直流的信号波动大小有关, 与其幅度无关。所以采用能量熵变化量波动值与所设置的控制保护装置的启动阈值进行比较, 根据比较结果决定是否启动控制保护装置。这样可以保证方法的准确度, 不会产生误判, 可以使控制保护装置精准可靠地进行。
5 实现控制保护
根据设置的特高压直流控制保护启动阈值进一步进行故障位置的识别, 以便于控制保护装置启动时,可以精准地定位到故障位置, 进行针对性的保护。当电路的正极位置发生故障时, 电路的负极电压会在额定电压的周围进行波动, 会产生地模电压, 并且产生的地模电压的大小为负; 当电路的负极位置发生故障时, 其产生的地模电压的大小则为正; 当电路的双极位置发生故障时, 电路的正极电压和负极电压都会发生变化, 且其变化趋势是相同的。并且此时的地模电压为0[7]。因此通过故障时的地模电压融入到控制保护特征矩阵的数据库中, 进行对故障的准确识别。计算故障时的地模电压在采样时刻中的地模电压总和,公式如下所示:
式中,A为故障时的地模电压在采样时刻中的地模电压总和,k为常数,u为故障时的地模电压。当A≤-As时, 则代表故障点为正极接地短路, 当A≥As时则代表故障点为负极接地短路, 当-As<A<As,则代表故障点为双极短路。As为数据库中结合矩阵样本选定的故障位置阈值, 设置为10。至此基于行波能谱矩阵相似度的特高压直流控制保护方法完成。
6 实验对比分析
为了证明基于行波能谱矩阵相似度的特高压直流控制保护方法的控制保护效果好, 引入传统的特高压直流控制保护方法和基于PWM 的特高压直流控制保护方法进行对比。
6.1 实验准备
在实验开始之前, 为了防止不必要因素产生的误差, 将电路相关参数进行设置, 如表1 所示。

表1 参数设置表
并且添加30dB 噪声进行实验[8], 确保方法的可靠性, 可以不受外界的影响。选取同种类型的5 个电路进行实验, 将三种方法分别对五个电路进行控制保护, 防止因电路不同而产生的的误差。将控制保护情况进行等级的划分, 以便于实验结果的对比, 控制保护情况等级划分表如表2 所示。

表2 控制保护情况等级划分表
根据划分的等级作为标准, 对三种方法进行5 个电路的控制保护情况进行等级的判断。
6.2 实验对比
将基于行波能谱矩阵相似度的特高压直流控制保护方法与传统的特高压直流控制保护方法和基于PWM 的特高压直流控制保护方法同时对5 个电路进行对特高压直流控制保护, 将三种方法对电路的控制保护情况结果进行对比。实验对比结果如表3 所示。
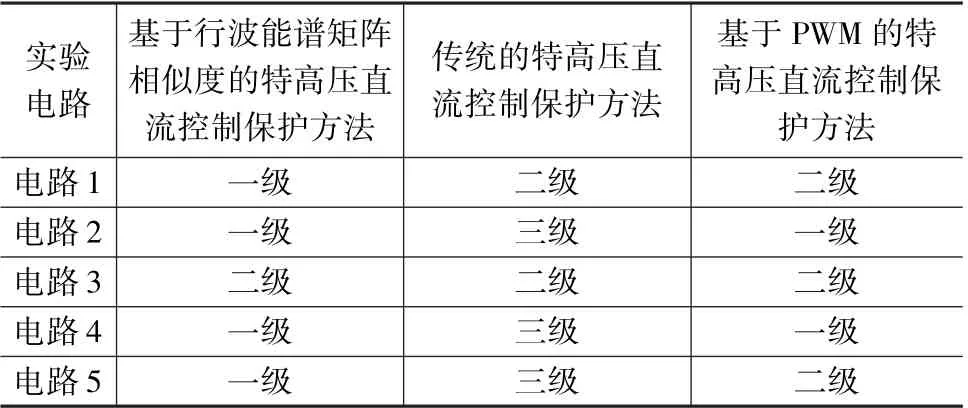
表3 实验结果对比表
由表3 可知, 基于行波能谱矩阵相似度的特高压直流控制保护方法对五个电路的控制保护等级均为一级,电路几乎没有损坏; 基于PWM 的特高压直流控制保护方法对五个电路的控制保护等级为一级和二级, 电路有小部分的损坏, 控制保护效果也没有很好; 而传统的特高压直流控制保护方法对五个电路的控制保护等级甚至出现了三级, 电路已经出现了不能使用的情况, 其对特高压直流控制保护的效果很差。所以证明了基于行波能谱矩阵相似度的特高压直流控制保护方法在保证其可行性的同时还有效提高了其对特高压直流的控制保护的效果。
7 结束语
为满足社会的发展, 特高压直流电网已经被广泛的应用, 但是对特高压直流控制保护并没有达到精准控制保护。为此提出了基于行波能谱矩阵相似度的特高压直流控制保护方法, 通过确定行波时频原始特征, 提取特高压直流故障特征, 基于行波能谱矩阵相似度构造控制保护特征矩阵, 设置特高压直流控制保护启动阈值, 最后实现对特高压直流控制保护。并且通过实验证明了本文的方法比实验参照组的两种方法的控制保护效果好很多, 本文方法有效提高了对特高压直流的控制保护效果。
猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:57:42
中国临床医学影像杂志(2022年2期)2022-05-25 13:24:42
成都信息工程大学学报(2018年1期)2018-05-31 08:40:38
高师理科学刊(2016年8期)2016-06-15 20:27:45
通信电源技术(2016年3期)2016-03-26 07:13:22
信息记录材料(2016年4期)2016-03-11 15:22:56
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:50
现代企业(2015年6期)2015-02-28 18:51:53
广西科技大学学报(2015年4期)2015-02-27 12:22:22
西安建筑科技大学学报(自然科学版)(2014年2期)2014-11-12 13:04:38
