
增程式电动汽车能量管理策略多目标优化
2023-11-28 13:06王良模刘经兴邹小俊
南京理工大学学报 2023年5期
徐 严,王良模,刘经兴,王 陶,陈 刚,邹小俊
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.南京依维柯汽车有限公司,江苏 南京 211800)
当前,纯电动汽车充电时间长,充电不方便,一次充电的最大行驶里程短等缺点阻碍了纯电动汽车的进一步普及和该行业的发展。增程式电动汽车(Extended range electric vehicle,EREV)具有续航里程长、补能方便快速、燃耗和排放低等优点,很好地弥补了纯电动汽车的短板,是纯燃油向纯电动能源汽车过渡时期最具发展潜力的混合动力车型之一[1]。
EREV的能量管理策略大致可以分为两类:基于规则的和基于算法的能量管理策略。基于算法的能量管理策略主要包括模糊控制、动态规划、预测控制等,这些方法因为对硬件算力要求较高、工况未知、鲁棒性不强等原因较少实际应用于EREV整车管理策略。基于规则的能量管理策略算法简单,对控制器计算性能要求低,在实际中得到了较为广泛的应用[2]。其策略又分为两类:混合(Blender,BL)型和电能消耗-维持(Charge directly-charge sustain,CD-CS)型。其中,基于BL的策略,发动机全程参与工作为电池充电[3]。而基于CD-CS的策略主要包括恒温器控制策略和功率跟随最优曲线策略等,这些控制策略通常是根据动力电池的电池状态(State of charge,SOC),车速和车辆运行功率需求等对增程器(Auxiliary power unit,APU)进行控制[4]。恒温器控制策略虽然效率较高,但需要匹配较大型增程器,且对电池的充电功率要求较高,SOC波动较为剧烈,对电池循环使用寿命影响最大。功率跟随策略理论上能控制增程器的输出功率接近整车需求功率,最大化减少了电池的充放电功率和能量,降低了燃油消耗的同时也延长了电池使用寿命[5]。但汽油发动机转速和输出功率控制系统是一个典型的非线性、强耦合、时变动力学系统[6]。发动机在PID控制器的作用下往往难以实现快速响应的跟随控制,容易引起增程系统的振动噪声问题,且导致油耗和排放恶化。
为了解决上文所述的问题,本文提出了一种基于发动机四点控制的控制策略,在最佳燃油消耗曲线上选用四个工作点,根据电池SOC与整车需求功率来切换不同的发动机工作点。该控制策略由恒温器式与功率跟随控制策略结合而成。这种控制策略不仅具有了恒温器控制里把发动机稳定在工作点的优点,当整车功率需求较小时能够切换到低功率工作点处,有效降低了能量二次转化造成的损耗;还结合了功率跟随的思想,通过工作点的切换减少了电池的充放电。使整个系统维持了较高的鲁棒性、可靠性和效率。
1 增程式电动汽车结构与工作模式
本文研究对象是某款整备质量为1 930 kg,轴距为2 900 mm的增程式电动越野汽车。其动力系统拓扑图如图1所示。该增程式电动车的发电系统由一台1.5 T增程器经单级增速器连接一台发电机组成,发出的电能通过电能分配单元即能给动力电池充电,也能给前后轴驱动电机供电,前后轴驱动电机峰值功率为130 kW,峰值扭矩300 Nm。整车动力系统共有三种工作模式:纯电模式、增程模式、电量保持模式。其工作模式切换规则如图2所示。整车从先纯电行驶一段里程至SOC下降至增程器开始工作的SOC某一阈值上限(通常为40%~60%),然后在增程模式下行驶直至SOC下降至某一阈值下限(通常为20%~30%),此时动力电池接近馈电状态,此时增程器工作最为频繁,维持SOC在一较窄范围内波动,整车以电量保持模式工作。

图1 增程式电动车结构图

图2 工作模式切换图
由于充电桩等基础设施建设不够完善,动力电池容量相对较小,或驾驶员长途出行、充电较慢等因素,会经常将车辆动力电池使用到接近馈电状态而不进行充电,则整车将长时间工作在电量保持模式区。且工信部、财政部、税务总局联合发布《关于调整免征车辆购置税新能源汽车产品技术要求的公告》,对相关标准进行了调整,对纯电续航、电量保持模式油耗有进一步限制,其中着重提出插电式(含增程式)混合动力乘用车电量保持模式试验的燃料消耗量(不含电能转化的燃料消耗量)与《乘用车燃料消耗量限值》(GB 19578-2021)中车型对应的燃料消耗量限值相比应当小于70%。参照该标准,该车型在状态保持模式下,油耗需低于6.5 L/100 km。因此,优化电量保持模式下的油耗显得非常重要。研究表明,大部分混合动力车型都存在动力电池馈电时,油耗较高的问题,所以优化馈电状态下的控制策略是非常必要的。本文将重点研究电池接近馈电时(即电量保持模式下)四点控制策略下的控制参数优化方法,并和优化之前的控制策略对比,验证其有效性。
2 等效燃油消耗最小控制策略
增程式电动车的能量管理是一种在满足系统约束条件的前提下,通过求解最优控制解集使得目标函数最优的最优控制问题。因此,本文采用最小值原理建立优化问题,其原理如下:
设n维系统的状态方程
(1)
式中:x(t)为n维系统状态向量,u(t)为r维控制变量,f(·)为n维向量函数。
初始条件为
x(t0)=x0
(2)
末端时间和末端状态的约束条件
ψ[x(tf)]=0
(3)
性能指标函数为

(4)
式中:L[x(t),u(t),t]为系统瞬时成本函数,如发动机燃油消耗量、电池能量通量等;Φ[x(tf),tf]为末端成本函数,代表控制变量的约束条件,其哈密顿函数为
H(x(t),u(t),λ(t),t)=L[x(t),u(t),t]+
λt(t)f(x(t),u(t),t)
(5)
根据庞特里亚金最小值原理,要使性能指标函数取最小值,必须使哈密顿函数取得全局极小值,此时状态变量取最优且控制变量取最优。则系统最优解的必要条件为
(6)
最小值原理主要运用于求解连续系统问题,所以无法将该方法直接用于而增程式汽车能量管理这类非连续系统问题。对此,Paganelli基于实际工程经验提出了一种等效燃油消耗最小控制策略(Equivalent consumption minization strategies,ECMS)[7],ECMS实质是最小值原理应用于混动汽车能量管理的近似方法,该方法把整车运行所需要的能量等效成燃油消耗,通过控制等效燃油消耗量最小来实现发动机和电池的功率分配[8]。以电池SOC(t)为系统状态变量x(t),电池功率Pbat(t)为控制变量u(t),根据式(1)可得系统的状态方程
(7)
ECMS把所有的能耗等效为燃油消耗,将式(5)中的性能指标表示为运行时的燃油消耗总量
(8)

接着,哈密顿函数可以表示为
(9)
式中:电池SOC的变化量一般用开路电压法,用以下数学模型代替
(10)
由于本文需要求解的问题是电量保持模式下的能量管理最优控制问题,因此电池开路电压Voc和内阻随SOC变化较小,可将其视为常数,则SOC变化量只与电池功率Pbat有关,则该式可以化简为
(11)
则由式(6)可得,λ是一个常数,取为s,则取得优化控制量的必要条件为
(12)
最终ECMS式(9)的求解方程表示为
(13)

在ECMS算法中,通过等效因子将燃油经济性全局优化能量管理问题转化为瞬时优化的等效燃油消耗最小问题进行求解[9],在混动汽车中,通常采取根据电池SOC值大小来设计等效因子。但本文研究的前提为馈电状态维持SOC平衡的工况,可视为SOC变化忽略不计,故可以采用固定等效因子代入计算。如下式所示
(14)
式中:ηf为发动机工作点的平均热效率;ηG为发电机平均效率。最终等效因子s初算为2.97。
3 增程式电动汽车的多目标优化
等效燃油消耗法只能优化燃油经济性,在本文探讨的问题中需要获得一组最优的功率阈值参数,使得在电量保持模式下既能提高燃油经济性又能使电池循环使用寿命进一步提升,故还需要进行多目标优化。NSGA2(Non-dominated sorting genetic algorithm 2)多目标遗传算法是用来分析和解决多目标优化问题的一种进化算法之一。其核心在于协调各个目标函数之间的关系,找出使各个目标函数非支配最优解集即pareto最优解集[10]。在多目标遗传优化算法中,NSGA2算法是影响最大的一种,故本文采用NSGA2算法来寻求最优解集。
3.1 优化变量选取
发动机的万有特性图如图3所示,选取最佳燃油消耗曲线上的A、B、C和D四个点为增程器工作点,对应输出功率分别为15 kW、20 kW、30 kW和45 kW,对应的增程器转速分别为1 500、2 000、2 300和3 500 r/min,从图中可得每个工作点对应的比油耗。

图3 增程器万有特性图
发动机依据动力电池SOC和需求功率Preq的状态和变化来进行工作点切换。增程器的工作点切换控制参X1-X4是判断增程器是否从当前工作点切换至其他工作点的需求功率阈值。该控制数对燃油经济性和电池使用寿命有直接影响。但初始切换阈值的参数设定是根据开发者的工程经验所设定的,并不能保证在此控制规则下达到性能最优。所以优化该组控制参数是十分必要的。表1为各个切换阈值对的取值区间。

表1 优化变量
3.2 优化目标
增程式汽车运行所需能量由电池和增程系统提供,其关系式为
preq=pbat+peng
(16)
(17)
式中:为对应工作点的比油耗,故根据式(13)可得到等效燃油消耗计算公式

(18)
则电能通量的计算公式如下
(19)
而最终电池能量消耗值如下
(20)
本文以整车等效燃油经济性及电池循环使用寿命作为系统的目标函数。将增程式电动汽车运行过程中从蓄电池消耗的能量等价为发动机的燃油消耗量,加上发动机实际燃油消耗量,获得每一时刻EREV的等效燃油消耗量,如式(18)所示,等效燃油消耗总量越低,整车运行更经济;式(19)表示将每一瞬时输入或输出的能量进行绝对值求和,获得流经电池的总能量,总能量越大表明电池充放电循环次数越多,电池循环使用寿命和电池充放电循环次数成反比;式(20)表示将每一瞬时流进和流出的能量进行求和,最终获得运行结束后的电池电量消耗(增加)总量,蓄电池电能消耗量越低,则电池SOC越接近初始值,即达到维持电池电量运行前后不变(CS)的目的。以此三个参数指标作为目标函数,经NSGA2算法寻优解得切换阈值功率的最优解集,由此获得增程器和蓄电池的功率分配。
故目标函数最优解minJ(t)为以下三个函数取最小值
(21)
3.3 初始条件

(22)
3.4 约束条件
在迭代寻优过程中,需要对有关参数的边界条件进行约束,本节以该车的整车性能约束指标和功率切换阈值为系统约束条件,其中整车性能约束指标主要包括满足整车高速巡航,最大爬坡度,加速时间等的动力要求和电池充放电功率限制。如下
(23)
式中:preq(vmax)代表最高巡航车速需求功率(kW);pi(v)为爬最大坡度的功率需求(kW);Tmax(t)为全力加速时驱动电机最大转矩(Nm);ηeffηm代表传动效率和电机效率;i0代表减速器传动比;r为车轮半径(m);peng_max为发动机最大输出功率(kW);pbat_max为电池的最大输出功率(kW);X1、X2、X3、X4为ABCD四个工作点的功率切换阈值(kW)。
3.5 求解过程
除遗传算法的交叉变异比较计算外,它还引入了精英策略。具体通过基于将父代种群与其子代种群混合后进行快速非支配排序求得支配等级Zi;并引入拥挤度比较算子,将拥挤度di作为种群中个体之间的比较准则,通过比较Zi、di筛选出优秀个体,保持种群多样性。精英策略求解执行步骤如图4所示。图5表示了该算法搜寻最优解集的整体过程:

图4 精英策略的执行步骤

图5 NSGA2算法基本流程
NSGA2算法的模型简化为
NSGA_2_OPTIM={C,J,POP,GEN,
M,N,V,A,B,C}
(24)
式中:C为个体编码方法,以二进制的方式,将待优化变量需求功率阈值X1、X2、X3、X4,SOC阈值等转化为字符串基因,并串连起来连成一个染色体,即优化解空间的一个向量X表示一个染色体编码;J为个体适应度评价函数,本文以整车等效油耗和流经电池总能量和保持电池电量作为目标函数;POP为初始种群,采用一致随机方法产生初始种群;M为目标函数数量,本文设置为3;N为种群数量,V为维度,表示决策变量的个数,从最大最小值之间随机选取一个值作为每一个决策变量;A选择算子;B为变异算子,采用基本位变异算子;C为运算停止条件代数,设置为达到最大迭代次数时停止运算。
4 联合仿真平台搭建与优化仿真分析
4.1 联合仿真平台的搭建
由于增程式电动车采用电动机直驱的驱动方式,在整车行驶工况确定之后,则驱动电机的需求功率也得以确定,驱动电机的需求功率加车载电器损耗功率可以得到整车需求功率。采用Simulink搭建控制策略模型,基于ECMS的多目标遗传算法(NSGA2)优化算法模型如图6。将需求功率拆分为发动机功率和电池功率,根据万有特性图已知发动机燃油消耗;将电池功率对应为等效燃油消耗。将其二者相加转化为总燃油消耗,再通过NSGA2算法进行多目标优化求解,并将优化结果返回控制策略。

图6 控制策略优化模型
采用AVL Cruise搭建EREV整车模型并进行联合仿真,如图7所示。本文主要研究电量保持模式下的优化控制策略,电量保持模式的SOC范围为(5%~30%)。

图7 增程电动汽车Cruise模型
4.2 优化仿真分析
将最优解对应的优化控制变量X1、X2、X3、X4输入Simulink控制策略中,导入Cruise整车模型,设置初始SOC为26%,在NEDC、WLTC和一段日常驾驶工况组成的组合循环工况下进行联合仿真,如图8所示。在NSGA2优化算法中,将其种群规模设定为200代,实际运算155代,优化后的Pareto最优解集如图9所示。图中,object1代表等效燃油消耗值;object2代表电池能量通量值,显然其Pareto前端显示二者为反比关系,符合该策略下的一般规律。选取距离原点距离最小的点代表该Pareto前端里面的最优解。故选取最终综合性能较优点如图9中(X,Y)点为最优解。
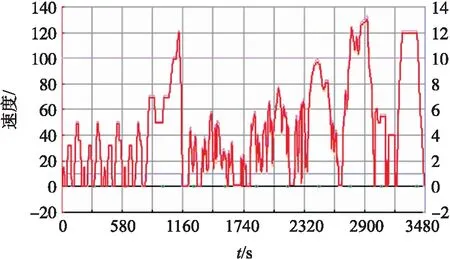
图8 组合循环工况

图9 Pareto前端
该复合工况下优化的仿真结果如图10所示。由图10(a)可知优化后流经电池的总能量有所减少,且需求功率切换阈值对电池充电能量影响较小,对电池放电能量影响较大。主要分析原因是整车运行过程中,电池充电来源一般受制动能量回收影响,而本文的控制策略优化主要针对电池放电过程中的能量输出。图10(b)表明,优化后发动机运行更偏向于高转速区间,低转速运行时间更短,高转速区间的燃油消耗率更低,故优化后油耗明显降低。由图10(c)可得,优化后的控制策略在整车运行过程中,电池SOC波动更小,且运行结束后,SOC值更接近初始值。
用同样方法,分别进行NEDC和复合工况,SOC初始值分别为30%和26%(均为电量保持阈值区间),共4种工况下进行优化,并汇总如表2所示。对比30%SOC初值下不同工况的结果,在NEDC工况下,导入优化后的控制参数,整车百公里等效油耗减少13.2%,流经电池能量减少8.9%,且运行过后最终SOC更接近初始值;在复合工况下,导入优化后的控制参数,整车百公里油耗减少8.8%,流经电池能量减少5%,且最终SOC更接近初始值。对比26%SOC初值下的结果发现,虽然等效油耗和流经电池能量均有增加,但增加较少,可以忽略不计。
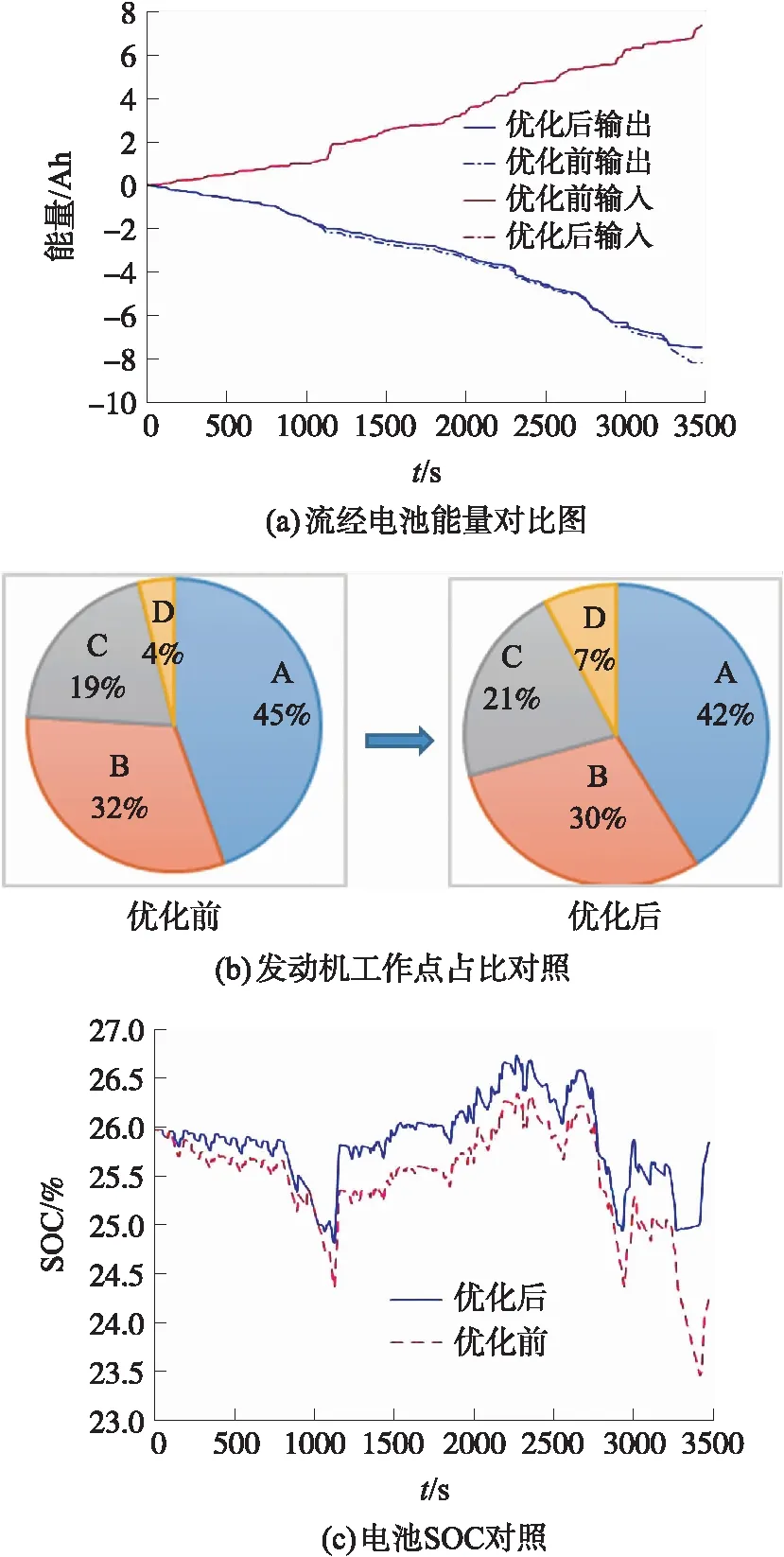
图10 NEDC循环工况仿真结果
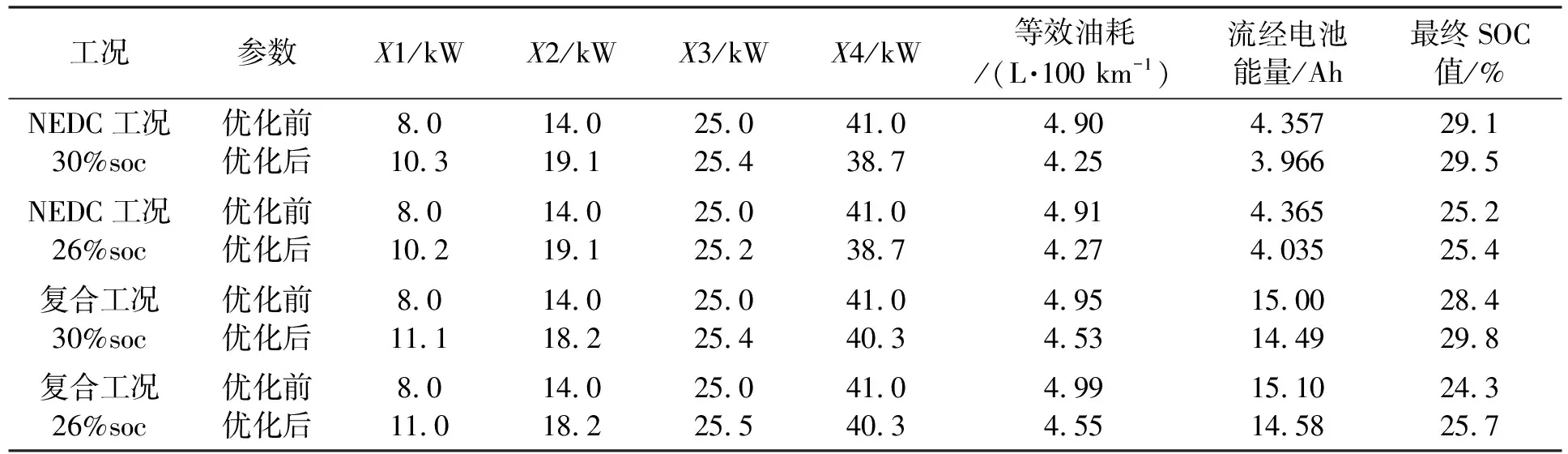
表2 工况仿真结果
5 结论
本文对比分析了增程式电动汽车的常用控制策略优缺点,结合两种控制策略的优点提出了基于等效燃油消耗的增程器四点式控制策略。建立了能量管理控制策略Simulink模型和整车动力系统Cruise模型,并利用多目标优化遗传算法(NSGA2)优化其控制参数。
仿真结果表明:(1)该优化方法下优化后两种工况百公里等效油耗分别减少13.2%和8.8%,流经电池能量减少8.9%和5%,电池循环使用寿命均有所提升;SOC值更接近初始SOC值,电量保持的效果更好。(2)对比SOC初始值为30%和26%的结果表明,在电量保持模式下,SOC初始值对优化结果影响较小。(3)对比NEDC工况和复合工况的优化结果,该优化方法在更复杂的行驶工况下,有效性略有下降。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年4期)2022-03-07
小哥白尼(野生动物)(2021年3期)2021-07-21
汽车实用技术(2020年2期)2020-02-25
汽车文摘(2017年5期)2017-12-05
汽车文摘(2017年10期)2017-12-02
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
