
无人机在架空输电线路巡检中的自动补光系统应用研究
2023-11-28 09:20杨俊武何天璞
山西电力 2023年5期
杨俊武,何天璞,李 枚,龙 涛,姚 璞
(国网湖南省电力有限公司湘潭供电分公司,湖南 湘潭 411100)
0 引言
随着电网建设步伐的快速推进,不同电压等级的架空输电线路网也变得日益复杂,且架空输电线路架设路径大多为山区、旷野和丘陵,在常年的运行过程中,极易受到泥石流、山火、舞动、覆冰等外界环境的影响和破坏,严重时会导致断线、掉串、倒杆等停电事故[1-8]。因此,如何快速、精准、高效地对危及架空输电线路安全运行的缺陷、隐患进行排查、识别显得尤为重要。利用无人机搭载的可见光巡检设备对架空输电线路进行多范围、多角度、多频次可视化巡检作业[9-15],具有操作简单、部署实施便捷、巡检效率高、巡检更精细且不受杆塔塔型及线路通道复杂环境影响等特点[16-22],虽在一定程度上提高了架空输电线路可视化巡检效率和巡检质量,弥补了传统人工巡视的不足,但在清晨、傍晚或者阴霾等天气时段,受现场巡检环境光线过暗的影响,无人机难以迅速、快捷地开展架空输电线路可视化巡检作业,即使通过无人机自身搭载的可见光巡检设备自动调焦曝光功能,也极易出现巡检照片过度曝光不清晰、巡检缺陷难以有效识别等问题。因此,提出一种可用于无人机在架空输电线路可视化巡检的自动补光系统,以满足无人机全时段巡检作业要求,必将成为无人机架空输电线路巡检领域一个研究热题。
1 无人机可视化巡检
1.1 无人机可视化巡检作业流程
为确保无人机高质、高效地开展可视化巡检作业,笔者对华中电网各单位无人机巡检中心进行了调研,从各单位输电线路无人机智能巡检系统应用中提炼出一套相对完善的可视化巡检作业流程,包括巡检任务规划、巡检任务准备、巡检任务实施、巡检报告生成等4个步骤。
a)巡检任务规划:由省(市)运检部、线路运行单位根据所辖地区架空输电线路投运年限、运行环境、设备本体健康水平、输电线路状态评价结果,按年、季、月制定无人机可视化巡检任务,明确各时间段巡检重点和巡检部位。
b)巡检任务准备:输电检修公司按照机巡中心已派发的无人机巡检工单和架空输电线路无人机可视化巡检操作规程准备各项巡检任务,主要包括巡检空域申报、待巡检线路航线航点检查、无人机巡检设备检查等。
c)巡检任务实施:输电线路无人机巡检飞手根据已下达的巡检任务,按照《架空输电线路无人机巡线技术规程》《架空输电线路无人机巡检技术导则》《无人机安全操作说明书》等来进行标准化、规范化巡检作业,确保各类巡检任务安全、高效进行。
d)巡检报告生成:对架空输电线路无人机可视化巡检的所有数据、图像进行分类汇总,为线路今后运维检修提供重要借鉴。
1.2 无人机可视化巡检主要内容
无人机可视化巡检是指利用无人机搭载可见光巡检设备,对架空输电线路导地线本体、导地线悬垂线夹、杆塔塔材、杆塔螺栓、绝缘子串、金具、附属设备及线路通道等外部可见的缺陷、隐患进行排查、识别,主要包括无人机精细化巡视和无人机快速巡视,具体内容如表1所示。

表1 无人机可视化巡检主要内容
1.3 无人机可视化巡检安全要求
在开展架空输电线路无人机可视化巡检过程中,应在确保安全飞行、安全巡检的基础上有序开展各类自主巡检作业。
a)巡检作业需在良好天气下进行。在遇到雷、雨、雪、雾、大风天气时严禁起飞开展巡检作业,正在实施巡检作业的应立即返航。
b)巡检作业需在良好环境光线情况下进行。为确保无人机精细化巡检取得实效,无人机精细化巡检应尽量避开清晨、傍晚、阴霾等时间段,在作业现场环境光线达到一定亮度时方可开展巡检作业。
c)巡检作业需在已校核的巡检航线、航点内进行。通过对无人机可视化巡检飞行数据统计分析,为确保无人机飞行姿态平稳、巡检数据准确可靠,无人机飞行轨迹需严格按已规划的航线、航点开展巡检作业,严禁擅自更改航线、航点或扩大航线区域范围。
d)巡检作业需在安全距离下进行。为降低输电线路电晕、电场对无人机可视化巡检作业的干扰,无人机航线、航点距架空输电线路带电导线最近直线距离不准小于表2规定,且禁止无人机长时间在导地线、相间线之间频繁穿梭飞行。
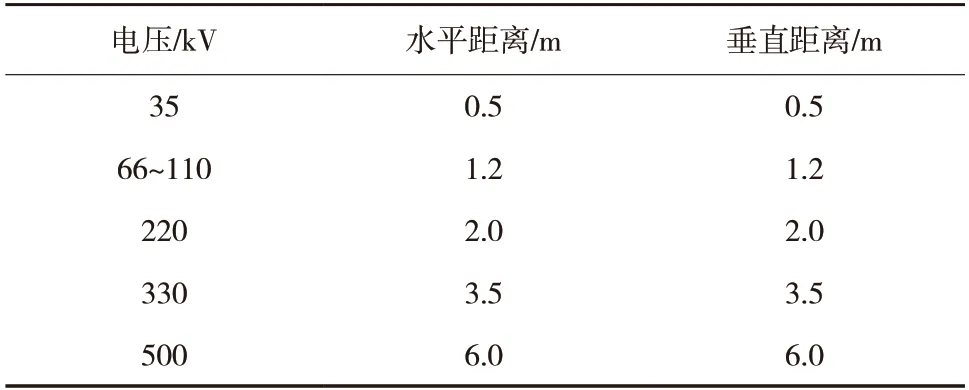
表2 无人机可视化巡检最近安全距离
2 环境光线过暗对无人机巡检的影响
2.1 巡检质效的影响
据巡检现场数据统计分析,无人机可视化巡检虽可大幅度替代传统人工登塔巡检作业,解决了传统人工巡视步履维艰、高空坠落等风险,但在清晨、傍晚和阴霾时间段,无人机精细化巡检缺陷识别率将大大折扣,甚至出现误判等情况。以华中地区某条老旧220 kV架空输电线路001号—030号区段线路为例,在晴朗环境光线情况下,无人机精细化巡检发现缺陷总计61处(其中螺栓缺失22处、开口销缺失18处、架空地线挂点锈蚀15处、绝缘子自爆6处)。但在清晨、傍晚、阴霾等环境光线较暗情况下,无人机精细化巡检发现缺陷总计仅为34处(螺栓缺失8处、开口销缺失10处、架空地线锈蚀10处、绝缘子自爆6处)。与晴朗环境光线相比,环境光线较暗情况下缺陷发现率仅为55.7,严重影响了无人机可视化巡检质效。无人机不同环境光线下缺陷发现数情况如图1所示。

图1 无人机不同环境光线下缺陷发现数统计
2.2 巡检安全系数的影响
从华中电网某机巡中心近5年无人机可视化巡检作业坠机分析报告统计发现,飞手因环境光线过暗未能及时识别障碍物,致使无人机碰撞导地线、杆塔拉线等坠机达23架次,占总坠机数量的36.7。其中,2017年坠机5架次,占全年坠机数量的33.3;2018年坠机6架次,占全年坠机数量的35.3;2019年坠机8架次,占全年坠机数量的53.3;2020年坠机4架次,占全年坠机数量的28.6;2021年坠机6架次,占全年坠机数量的33.3。近5年无人机可视化巡检坠机统计情况如图2所示。

图2 近5年无人机可视化巡检坠机统计图
3 无人机可视化巡检研究
3.1 图腾柱开关电路工作原理
图腾柱开关控制电路如图3所示,图腾柱开关控制电路为上下各有1个三极管,其中Q2为NPN三极管,Q3为PNP三极管,Q2与Q3共基极接输入、共发射极接输出,若输入高电平信号,则Q2导通Q3截断,此时LED补光灯导通由电源供电工作,若输入低电平信号,则Q2截断Q3导通,此时LED补光灯经Q3直接接地,既通过输入信号的改变,Q2、Q3自动交替在导通、截断工作状态。
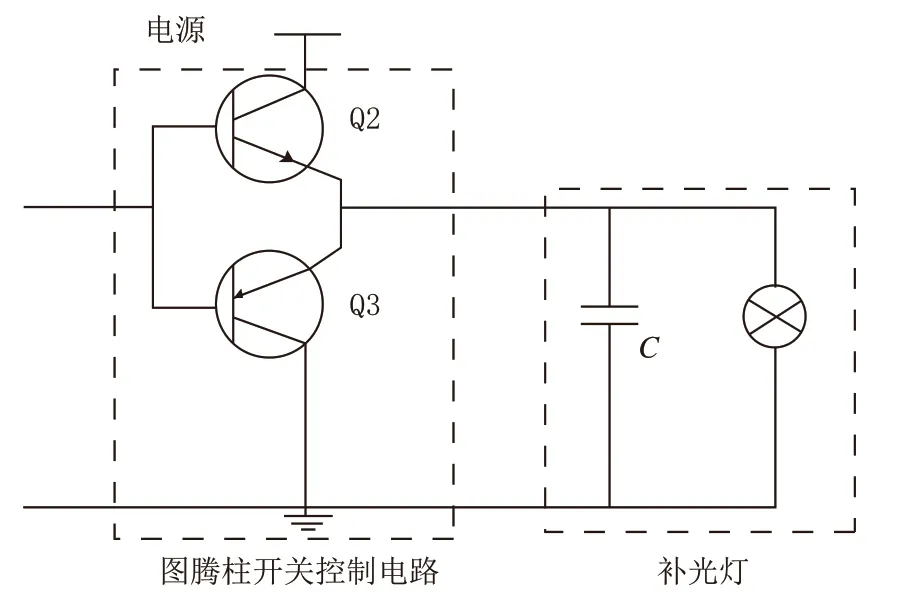
图3 图腾柱开关控制电路图
3.2 无人机巡检补光系统研究
无人机可视化巡检自动补光系统电路如图4所示,以图腾开关控制电路为核心,研究出了一种可用于无人机架空输电线路可视化巡检的自动补光系统,该系统包括环境光线亮度实时检测模块、高低电平逆转模块、图腾柱开关控制模块、稳压模块、补光模块。
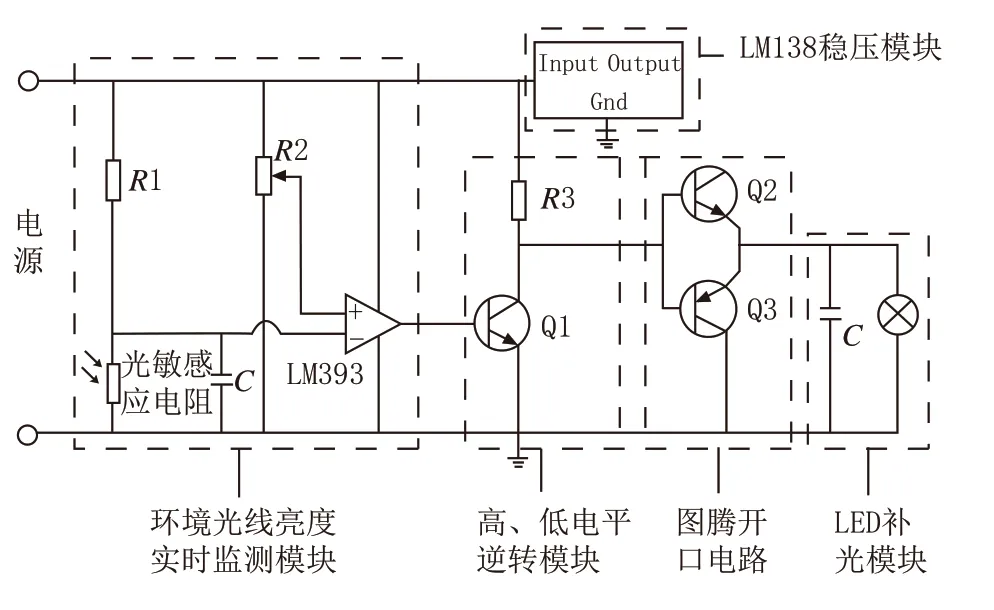
图4 无人机可视化巡检自动补光系统电路图
a)环境光线亮度实时检测模块:由LM393宽压比较器、光敏感应电阻构成的光线亮度实时检测电路系统,根据光敏感应电阻阻值大小变化判断无人机可视化巡检作业现场光线强度变化,若光线较暗,达不到预设光强阀值,光敏感应电阻值较大,则U->U+,LM393宽压比较器输出低电平补光信号;若光线较亮,达到预设光强阀值,光敏感应电阻值较小,U-<U+,LM393宽压比较器输出高电平补光信号。
b)高、低电平逆转模块:由NPN三极管(Q1)构成的信号逆转电路系统,基极与LM393宽压比较器输出端连接,若基极输入端为低电平补光信号时,输出端为高电平补光信号,基极输入端为高电平补光信号时,输出端为低电平补光信号。
c)图腾柱开关控制模块:由NPN三极管(Q2)、PNP三极管(Q3)共基极组合而成的开关电路,若收到的是低电平补光信号,则Q2处于截断状态,Q3处于导通状态,补光模块将经Q3接地处于关闭状态;若收到的是高电平补光信号,则Q2处于导通状态,Q3处于截断状态,补光模块便经由Q2直接连接到稳压器输出端开启补光。
d)LM138稳压模块:LM138三端稳压器的Input输入端与电源模块输出端电连接,Output输出端与开关控制模块电连接,用于给补光模块提供稳定补光电源。
e)LED补光模块:可选用LED等探照灯,其补光强度、补光范围可以根据作业现场灵活选择。
该系统的具体步骤如下:通过环境光线亮度实时检测模块实时检测无人机可视化巡检作业现场光线强度变化,并将光线强度信息实时转换成高、低电平补光信号至高、低电平逆转模块;高、低电平逆转模块将低电平输入信号转换成高电平输出信号,高电平输入信号转换成低电平输出信号;图腾柱开关控制电路在收到高电平补光信号后导通LED补光模块开启补光,收到低平补光信号后关闭LED补光模块。自动补光系统流程如图5所示。
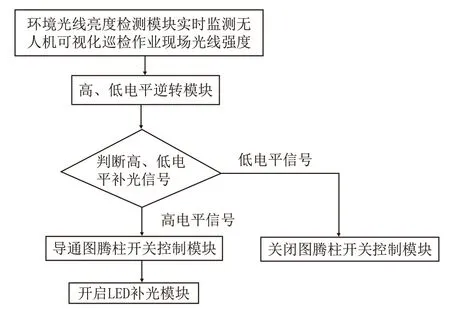
图5 无人机精细化巡检自动补光方法流程图
4 自动补光系统效果分析
为更好地论证该自动补光系统的可行性和高效性,文中选取华中电网某山区220 kV架空输电线路001号—030号区段线路为例,分别在晴朗环境光线充足、清晨、傍晚、阴霾等环境光线较暗等情况下开展无人机精细化巡检作业,通过对现场巡检图像数据生成的巡检报告分析发现,在晴朗环境光线充足时,累计发现缺陷22处(螺栓缺失5处、开口销缺失7处、绝缘子正挂点鸟窝4处、导线悬垂线夹锈蚀6处);在清晨环境光线较暗时,累计发现缺陷18处(螺栓缺失4处、开口销缺失5处、绝缘子正挂点鸟窝4处、导线悬垂线夹锈蚀5处);在傍晚环境光线较暗时,累计发现缺陷20处(螺栓缺失5处、开口销缺失6处、绝缘子正挂点鸟窝4处、导线悬垂线夹锈蚀5处);在阴霾环境光线较暗时,累计发现缺陷21处(螺栓缺失5处、开口销缺失6处、绝缘子正挂点鸟窝4处、导线悬垂线夹锈蚀6处)。分析发现,在清晨、傍晚、阴霾等环境光线较暗情况下,无人机搭载该套自动补光系统开展精细化巡检缺陷发现率均可达80以上,有效解决了原有巡检照片不清晰、巡检缺陷难以有效识别等问题。无人机自动补光系统可视化巡检缺陷统计如图6所示。
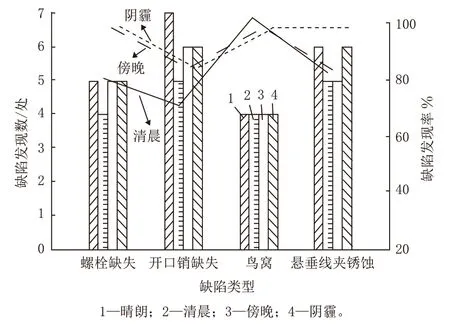
图6 无人机自动补光系统可视化巡检缺陷统计
5 结束语
架空输电线路无人机巡检技术已在电网系统内开始标准化、规范化巡检作业,在一定程度上满足了线路巡视要求,但受巡检设备性能的影响,部分巡检作业领域依然处于起步阶段。本文针对清晨、傍晚或者阴霾天气,受环境光线过暗影响,无人机难以迅速快捷地开展架空输电线路可视化巡检作业问题,提出了一种可用于无人机精细化巡检作业的自动补光系统,解决了在光线过暗条件下巡检照片不清晰、缺陷难以识别等难题,有效提升了无人机全天候、全时段开展架空输电线路可视化巡检水平。
猜你喜欢
小学生学习指导(小军迷联盟)(2023年4期)2023-05-10
江苏安全生产(2022年11期)2023-01-11
轨道交通装备与技术(2021年5期)2021-11-19
电子制作(2019年19期)2019-11-23
环球时报(2019-03-11)2019-03-11
今日农业(2019年16期)2019-01-03
汽车维修技师(2018年7期)2018-12-07
中国交通信息化(2017年8期)2017-06-06
核技术(2016年3期)2016-04-19
现代农业(2016年6期)2016-02-28
