复杂密林地区植被点云组合滤波方法研究
2023-11-28 04:07:42和云亭邓兴升
森林工程 2023年6期
和云亭 邓兴升

摘 要:为提高密林地形激光雷达测量(Light Detection and Ranging,LiDAR )点云数据植被点和地面点精准分类精度,采用5大传统滤波方法对林区点云进行滤波精度评定,借助布料仿真滤波算法实施相应的初始滤波处理,经准确处理后得到地形特征相对完备的初始地表点,再对具有突出植被点的初始地表点实施迭代开运算,由此得出新的地表点。并借助Ⅰ类误差、Ⅱ类误差等一系列的指标获得科学的评估精确度。布料仿真算法与简单形态学算法组合滤波较传统滤波算法Ⅱ类、总误差均明显下降,Kappa系数呈增长趋势。结果表明,该方法适用于林区点云分类,可以获得较好的滤波效果。
关键词:雷达点云;复杂密林地区;布料仿真滤波;简单形态学算法;组合滤波
中图分类号:S771.8 文献标识码:A 文章编号:1006-8023(2023)06-0156-08
Study on Combined Filtering Method of Vegetation Point Cloud in Complex Dense Forest Area
HE Yunting, DENG Xingsheng
(School of Traffic and Transportation Engineering, Changsha University of Science & Technology, Changsha 410114, China)
Abstract:In order to improve the accuracy of precise classification of vegetation points and ground points using LiDAR point cloud data in dense forest terrain, five traditional filtering methods were used to evaluate the filtering accuracy of forest area point cloud, and the corresponding initial filtering was carried out with the help of cloth simulation filtering algorithm. After accurate processing, the initial ground points with relatively complete terrain features were obtained. Then, the iterative opening calculation was carried out on the initial ground points with prominent vegetation points, and the new ground points were obtained. And with the aid of a series of indicators such as Class Ⅰ error and Class Ⅱ error, the accuracy of scientific evaluation was determined. Compared with the traditional filtering algorithm of Class Ⅱ, the total error of the cloth simulation algorithm and simple morphology algorithm decreased significantly, and the Kappa coefficient showed an increasing trend. The results showed that this method was suitable for point cloud classification in forest area and can obtain better filtering effect.
Keywords:Radar point cloud; complex dense forest area; cloth simulation filtering; simple morphology filtering; combined filtering algorithm
收稿日期:2023-01-16
基金项目:湖南省自然资源厅科研项目(2022-22);湖南省自然科学基金(2020JJ4601);公路工程教育部重點实验室开放基金(KFJ190203)。
第一作者简介:和云亭,硕士研究生。研究方向为LiDAR点云数据处理。E-mail: 1004109816@qq.com
*通信作者:邓兴升,博士,副教授。研究方向为摄影测量与数据处理。E-mail: 383500135@qq.com
引文格式:和云亭,邓兴升. 复杂密林地区植被点云组合滤波方法研究[J]. 森林工程, 2023,39(6): 156-163.
HE Y T, DENG X SH. Study on combined filtering method of vegetation point cloud in complex dense forest area[J]. Forest Engineering, 2023, 39(6):156-163.
0 引言
林区地面点与植被点精确分类是植被高度建模、林区生物量估算和地形测绘中数据处理过程之一。在地理信息测绘生产中,航空摄影测量遥感作为大规模获取基础数据的主要方式,由于航空摄影采用的是可见光遥感,因此只能获得数字表面模型(Digital Surface Model, DSM),难以获得林下准确的地形信息。激光雷达测量(Light Detection and Ranging, LiDAR)属于一种测量精确度相对较高,且在林区具有一定穿透性、能够获取少量地表点云数据的新型对地观测技术。对LiDAR点云准确分类是精准获取林下地形信息的核心。现阶段有关地表点、非地表点分类的方法非常丰富,但是通常情况下使用频率较高的点云滤波手段主要有5大类:基于坡度滤波方法、基于形态学滤波方法、基于移动曲面滤波方法、基于不规则三角网滤波方法和基于布料仿真滤波方法。基于坡度滤波的方法原理简单易行,但计算量大,且对于复杂地形区域的坡度阈值难以确定,滤波效果较差;基于形态学滤波方法可以通过设置不同窗口,去除不同形状的地物,但保留地形特征较差,且所需预设参数过多,自适应性能不足;基于移动曲面滤波算法,可以在地形复杂且不断变化的区域获得更好的滤波效果,但对于非连续地形区域,滤波效果需要进一步提升 ;不规则三角网(Triangular Irregular Network, TIN)滤波算法最突出的优势是能够在大多数地形中使用,其他特点是整体滤波效果较好,但算法复杂、效率低、对地形连续性要求较高;运用布料仿真滤波(Cloth Simulation Filtering, CSF)算法对点云数据进行分类最早由Zhang 团队实现,具有原理简单,参数设置较少,自适应性强,基本不受地质环境和地物数量变化影响的滤波性能,可以高效地区分地面点和非地面点,但会受到反转后的地形表面点云数量影响,支撑点少时,粒子间因受内力影响,容易错误地将非地面点归类为地面点 。
林区地形因受植被覆盖影响,且林区植被高度不齐,地形特征较为复杂。王明华等提出了一种可以有效降低Ⅰ、Ⅱ类误差的滤波算法,该算法是基于坡度对较陡林区进行预处理并和最小二乘滤波所示进行结合,从而得到优化;彭丽 提出了结合最小距离和加权平均的滤波法,以多回波信息为基础,有效降低运算量,提高滤波效率的一种滤波法;陈传法等给出了在形态学开运算和稳健型Z-SCORE方法的支持下,可以准确得到大量地面种子点的一个以多分辨率层次插值为基础的林区滤波法,并给出了一个考虑地形坡度的自适应残差阈值,可以有效提高林区滤波精度。以上方法在植被稀疏的林区可以有较好的滤波效果,但对于植被覆盖率广且较密集的林区,难以精确的分类地面点和植被点。本研究通过对5大滤波算法实验对比研究,进行滤波结果分析,发现试验样本中CSF与简单形态学滤波(Simple morphological Filtering, SMRF)算法的优势在于效果相对较好,作用于林区中各有自己的优势。因此,本研究设想将2种滤波方法结合起来,对密集覆盖的复杂地形林区开展点云滤波实验研究,首先借助CSF不受地形条件的特点,获取保留地形特征完整的初始地面点,然后对初始地面点进行迭代开运算,以去除地面点中突出的植被数据,得到新的地面点和植被点,凭借实测数据结果对比剖析得知,在地形起伏复杂、植被较密集的林区,滤波效果更为理想,和其他滤波方法比较而言,本研究所选择的方法滤波效果更佳。
1 算法原理及流程
1.1 技术流程图
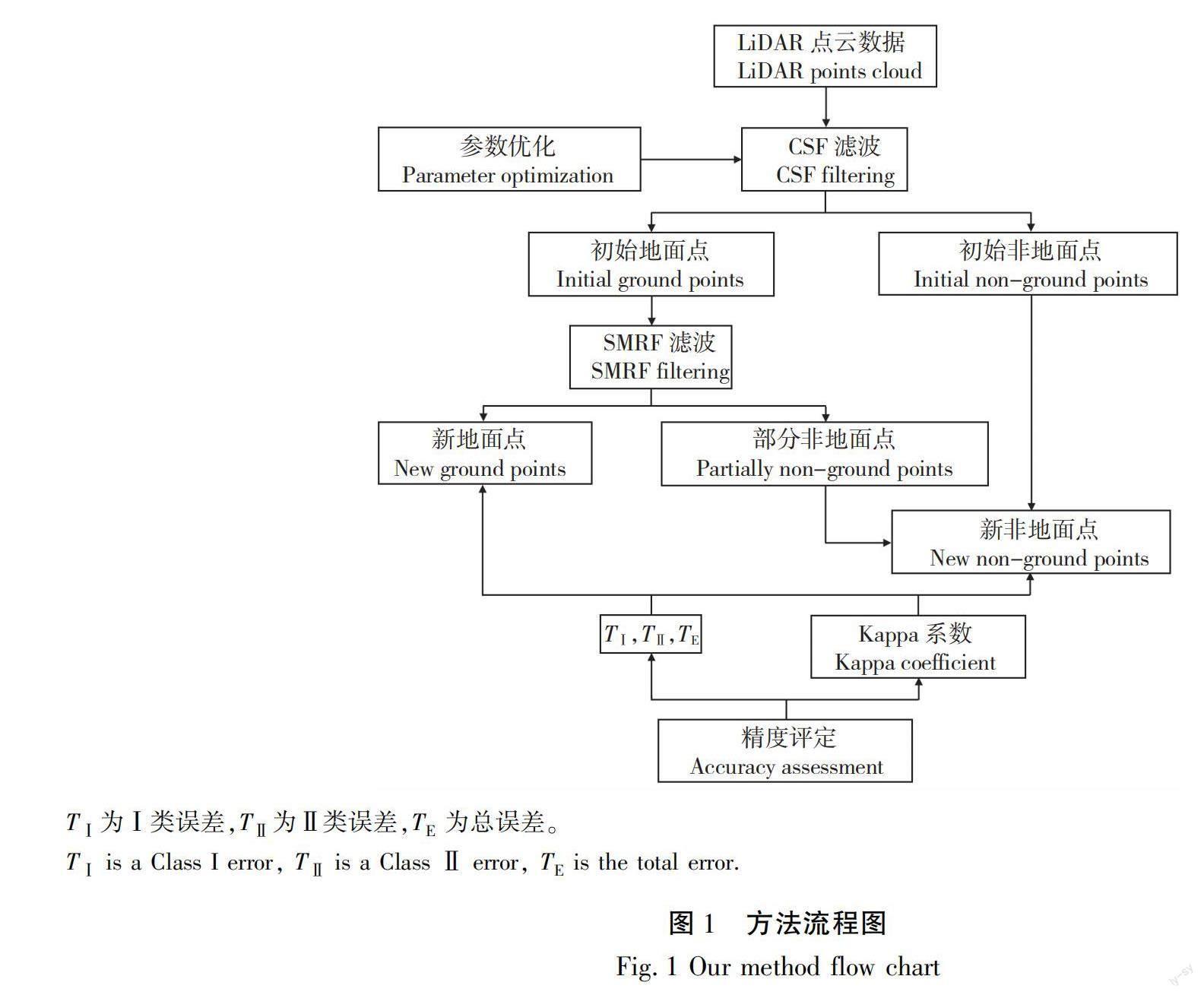
选择的滤波方法具体技术流程如图1所示,先进行CSF粗滤波,然后再对初始地表点实施SMRF精滤波,其原理与步骤分别见1.2和1.3节。
1.2 CSF粗滤波
CSF算法原理简单,通过设置点云高程为负值来实现地形反转,并通过分析节点和点云之间的相互作用来模拟布面模型,使点云地表点和植被点在此基础上实现分离从而拟合地表点。
CSF算法的主要步骤如下。
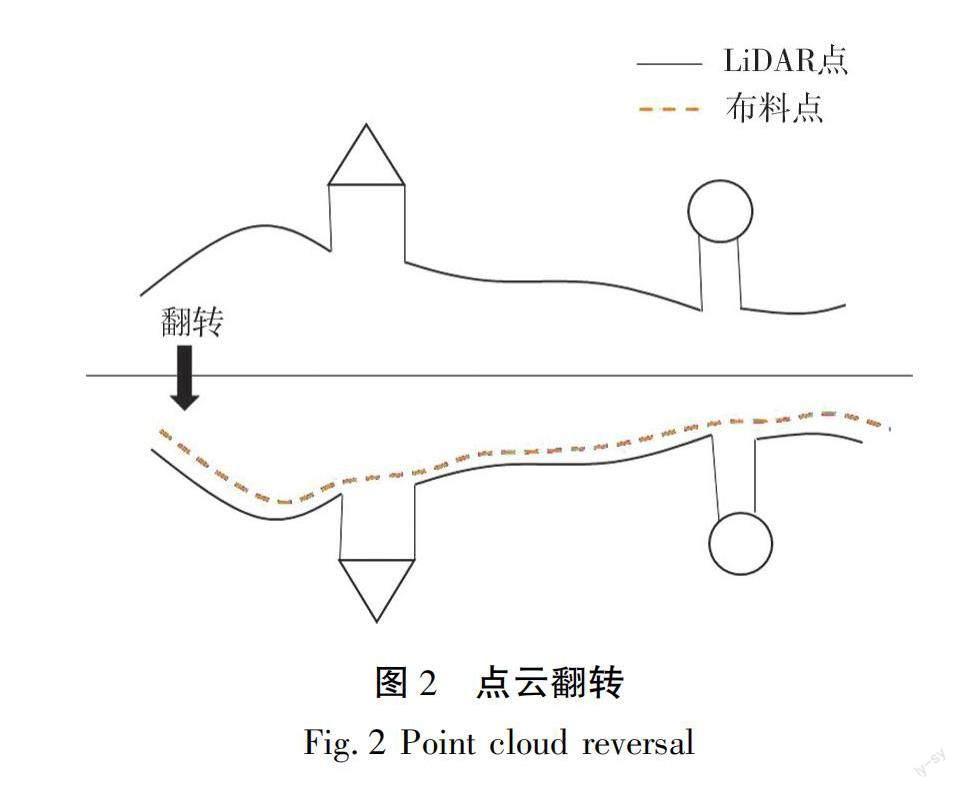
1)将原始LiDAR点云数据基于水平面镜向翻转,进而完成地形倒置,如图2所示。
2)设置初始布料位置,布料由粒子互相牵连构成,粒子数受布料分辨率影响,并记录LiDAR点云到布料内最近粒子的高度值(Intersection Height Value,IHV)。
3)粒子受内力作用会向下位移,当IHV更新至小于或等于高度阈值时,粒子停止移动。
4)直到當每个粒子都停止移动或者达到了用户设定的最高迭代频数时,整个仿真流程结束。
5)区别地表点和植被点的阈值计算。计算停止运动的布料粒子和LiDAR点云间的距离。对比每个LiDAR点,如果与仿真粒子之间的间距低于分类阈值,那么这个点就归入地表点,反之则被归入植被点。
1.3 SMRF精滤波
在使用SMRF对CSF方法获得的初始地表点进行精滤波时,主要使用开运算,表达式为公式(1),可以通过设置窗口尺寸,来去除初始地表点中的突出植被点数据。
开运算z°h=(zΘh)⊕h。 (1)
式中:°为开运算字符;Θ为腐蚀字符;⊕为膨胀字符;z表示规则化的表面模型;h表示结构元素。
SMRF滤波试验步骤详情阐述如下。
1)对粗滤波获得的地表点格网化处理,格网的边长确立为1 m,选取每个格网高程最小点构建初始最小表面Z。
2)实施开运算迭代。设置P和P2个变量来表示开运算前和开运算后的2个地表层格网,若2个地表层格网的差值大于分类阈值(E),则标记为植被点格网,反之则标记为地表点格网,且每次对格网进行分类时要进行E计算,其计算公式如下。
E=S×Q 。 (2)
式中:EG为P与N对应的格网差值范围;S为坡度值;Q 为各次迭代对应的开运算半径。迭代完成便会出现最小表面Z。
3)保留了Z中的所有地表格网,将植被格网排除出去。
4)将滤波分类后的地面点确定为最终地表点,植被点和CSF得到的初始植被点组合成最终的植被点。
2 试验结果与分析
2.1 试验数据及精度评定方法
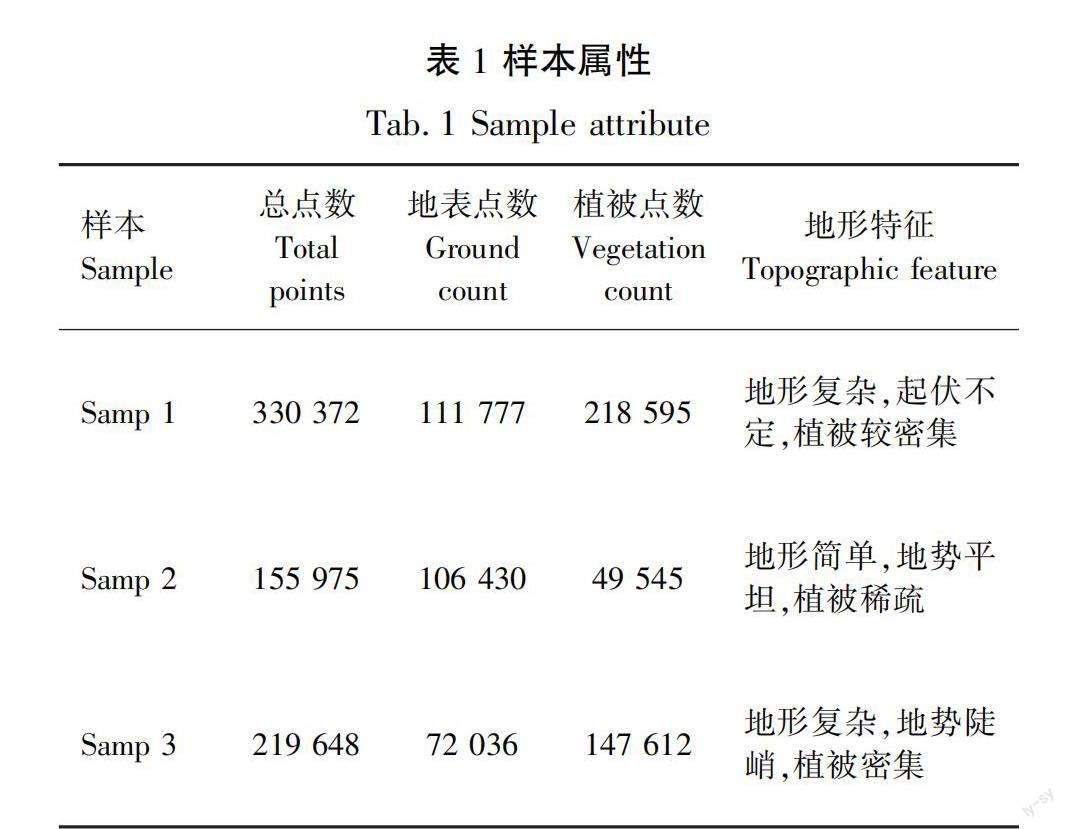
试验数据是龙腾多旋翼无人机搭载智喙PM-1500机载激光测量系统对实验区进行数据采集,并选取3个林区样本实施实验剖析,3个样本特征属性详情见表1。
采用计算Ⅰ类误差、Ⅱ类误差和总误差等方式,对本研究方法的可靠性进行评价,其中Ⅰ类误差表示地面点按非地面点进行分类;Ⅱ类误差是指把不是地表的点归到地表;总误差是指在总点数中,Ⅰ类和Ⅱ类误差点数所占比重的大小。精度评定表详情见表2。
表2中,a为正确归类的地表点的数目;b为非正确归类为植被点的地表点的数目;c为非正确归类为地表点的植被点的数目;d为正确归类的植被点的数目;f为正确的地面点总数;g为正确的植被点总数;e为点云总数;T表征的是I类误差;T表征的是Ⅱ类误差;T表征的是总误差。
2.2 五种滤波方法对比
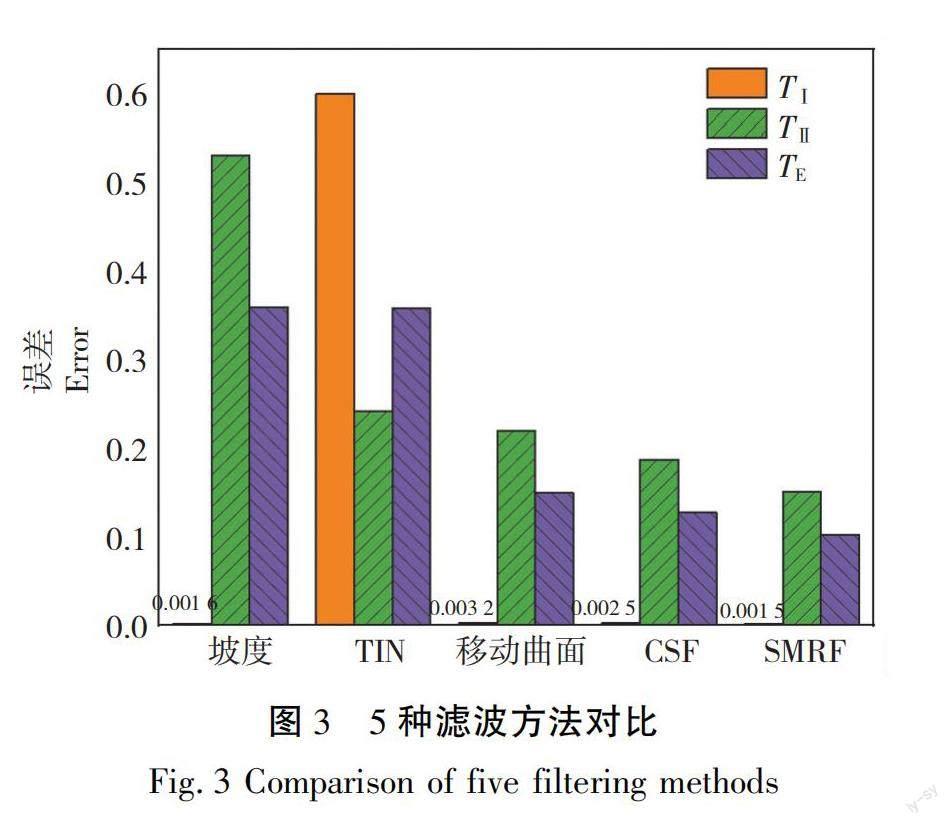
对Samp1分别采用5种常用的滤波算法进行滤波,并进行精度分析,结果如图3所示。
由图3可知,在进行样本试验时,结果证实CSF与简单形态学滤波效果更为理想。同时CSF和SMRF方法各有自己的优缺点。所以,本研究尝试将2种滤波方法结合起来,形成优势互补,应用于复杂地形密林区的点云滤波。
2.3 参数优化与定量分析
CSF算法虽然原理简单,参数设置少,但参数无法自适应设置,而是根据经验进行参数设置。为进一步提升在林区中的滤波精度,将采用Kappa系数(式中用K表示)对影响CSF算法的主要参数进行优化。Kappa系数能够对实验数据和参考数据二者的统一性程度加以准确衡量,是一种更稳定的测度,而非简单的百分比。其计算原则如下。
P=(a+d)/e 。 (3)
P=(a+b)(a+c)+(c+d)(b+d)/e 。 (4)
K=(P-P)/(1-P)。 (5)
式中,P、P为中间转换参数。
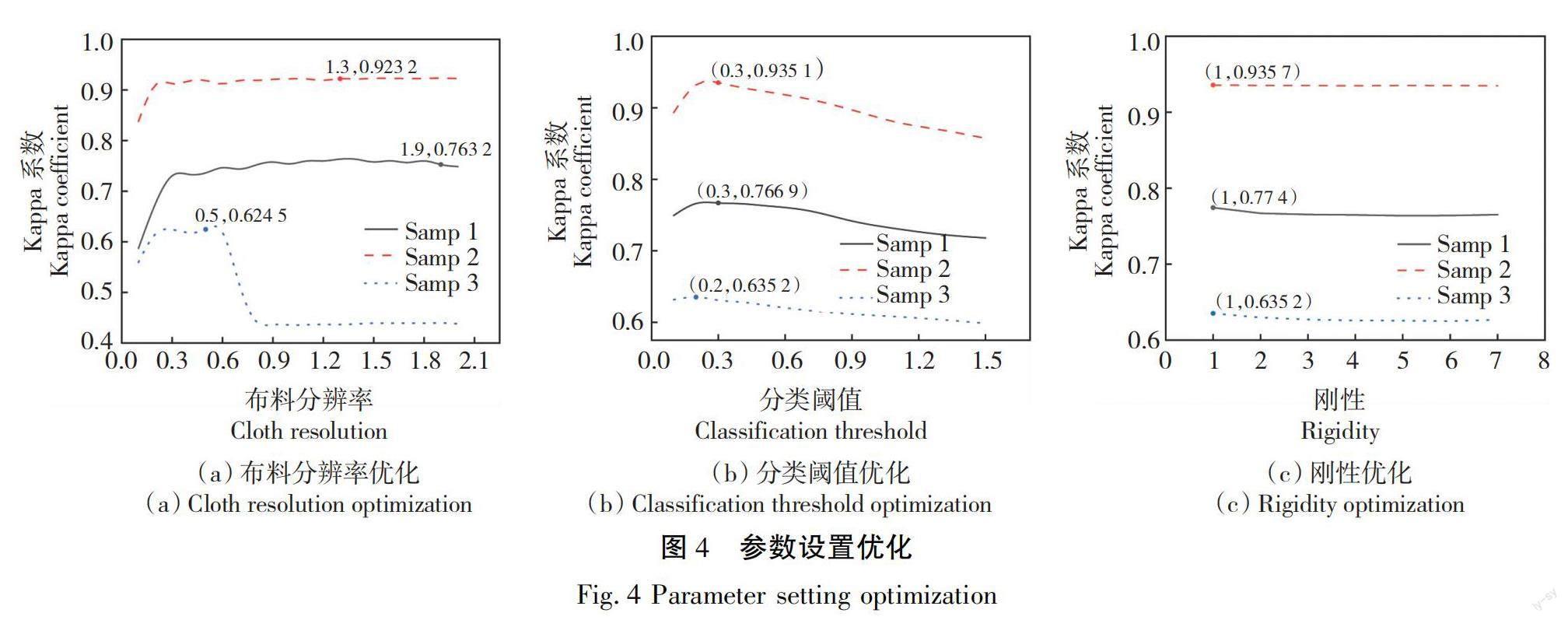
影响CSF算法的主要参数有布料分辨率、分类阈值、刚性以及迭代频数,将迭代频数设定为100次可以基本适用于大部分地形,对3个样本的其余参数进行优化,结果如图4所示。
由图4可知,Samp 1中当布料分辨率确立为1.3的情况下,Kappa系数达到最大,Samp 2在布料分辨率设置为1.9时,Kappa系数达到最大,Samp 3在布料分辨率为0.5时,Kappa系数达到最大;Samp 1和Samp 2分类阈值设置相同,为0.3时Kappa系数达到最大,Samp 3在分类阈值为0.2时,Kappa系数最大;3个样本都设置了刚性为1,这时Kappa系数达到了最大值。对于林区地形,采用CSF方法进行滤波时,分类阈值和刚性分别设置0.3和1,可以取得较好的滤波结果,且刚性的变化对Kappa系数影响不大。
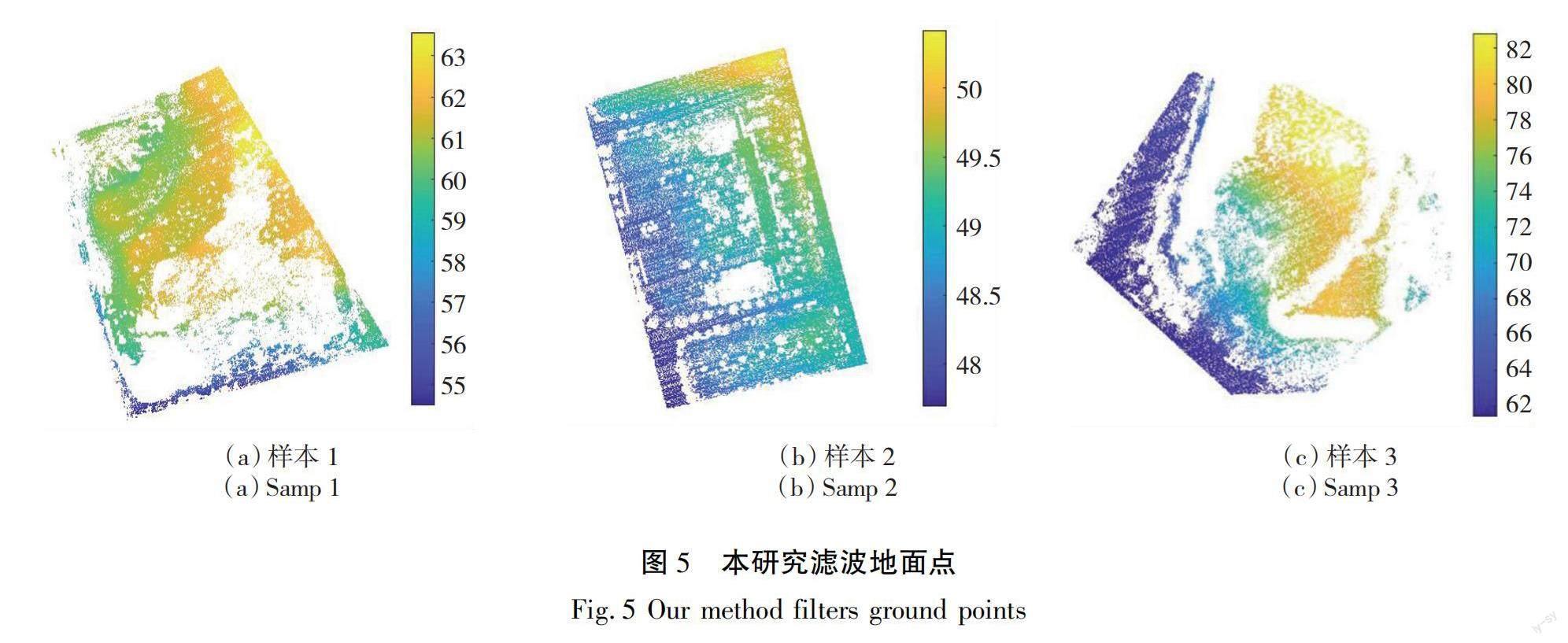
对3个样本分别采用优化后的参数进行CSF粗滤波,然后再对获得的初始地面点进行迭代开运算进行二次滤波,滤波后的地表点如图5所示。
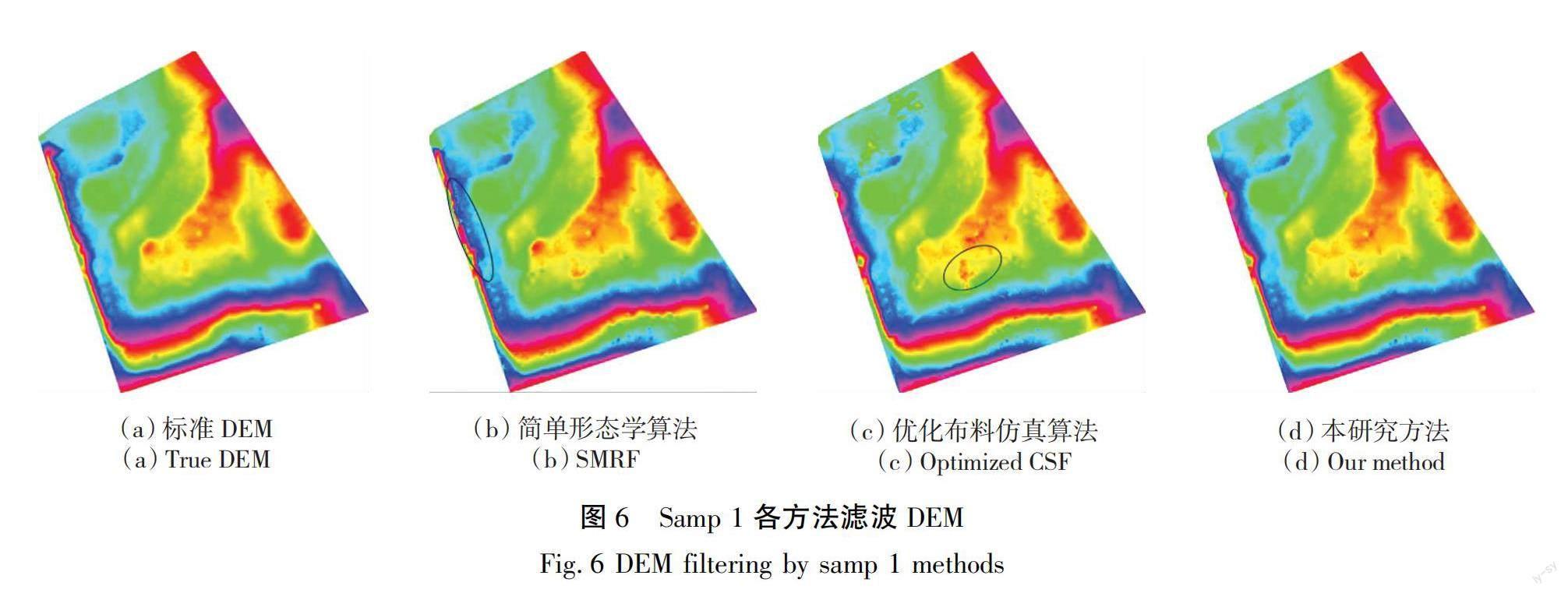
由图5可知,Samp 1样本林区地形起伏多变,整体最大变化幅度约为8 m,存有缓坡区域;Samp 2样本林区地形平坦,变化幅度较小,整体最大变形区域约为2 m;Samp 3样本林区为平地和陡坡连接地形,整体变化幅度较大,最高幅度可約达20 m。将3个样本滤波后的地面点采用global Mapper软件进行格网加密生成数字高程模型(Digital Elevation Model, DEM),并和参数优化CSF算法及SMRF算法进行可视化对比分析,如图6—图8所示。
由图6可知,在Samp 1样本林区中,SMRF方法滤波生成的DEM在边界处存在地形粗糙突变情况,可能为单棵植被没有滤去所致;同时优化CSF算法生成的DEM存在表面粗糙情况,可能为部分低矮植被没有滤去所致;采用本研究方法,相比于其他2种方法可以有效滤去单棵植被,并可以优化部分低矮植被无法滤去现象。
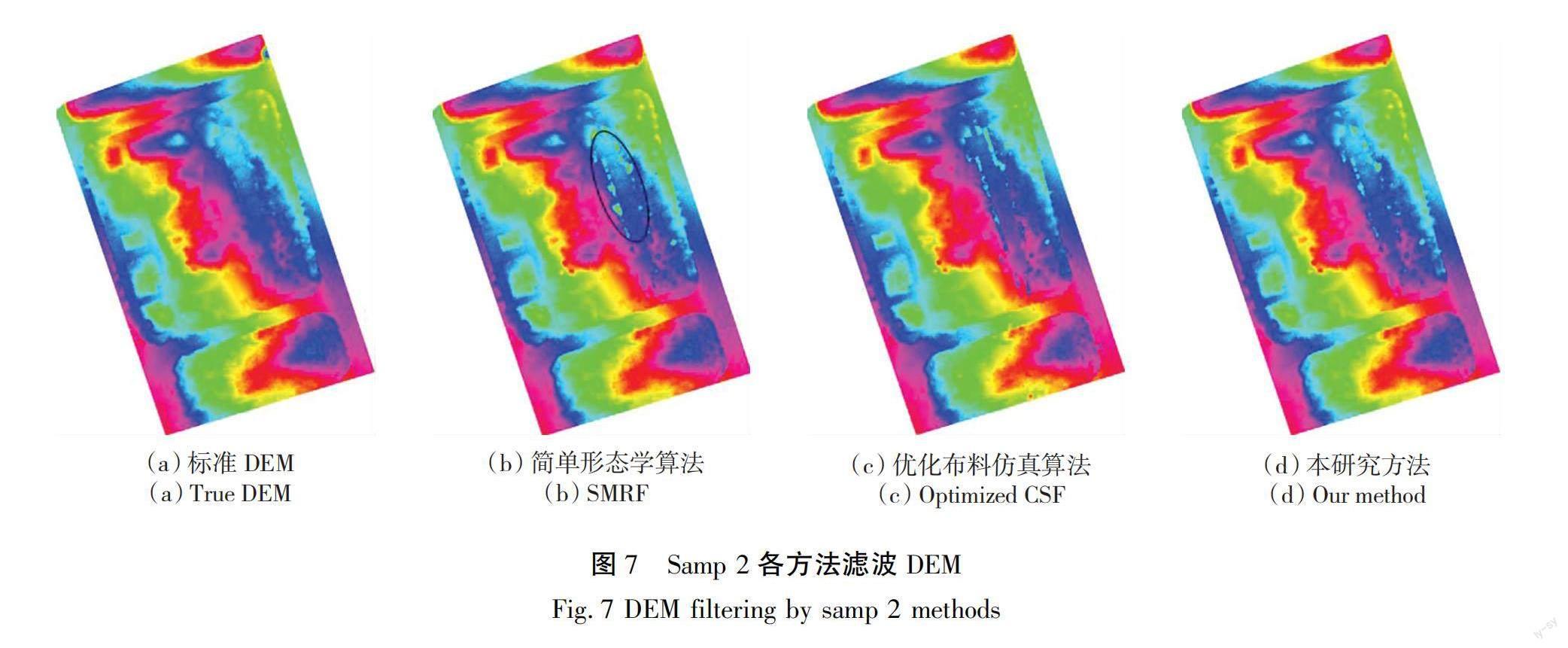
由图7可知,3种方法作用于Samp 2样本林区中,地形基本一致,都可以取得较好的滤波结果,SMRF方法滤波生成的DEM中存在少许区域凸起,可能为树根区域凸起没有滤去所致。
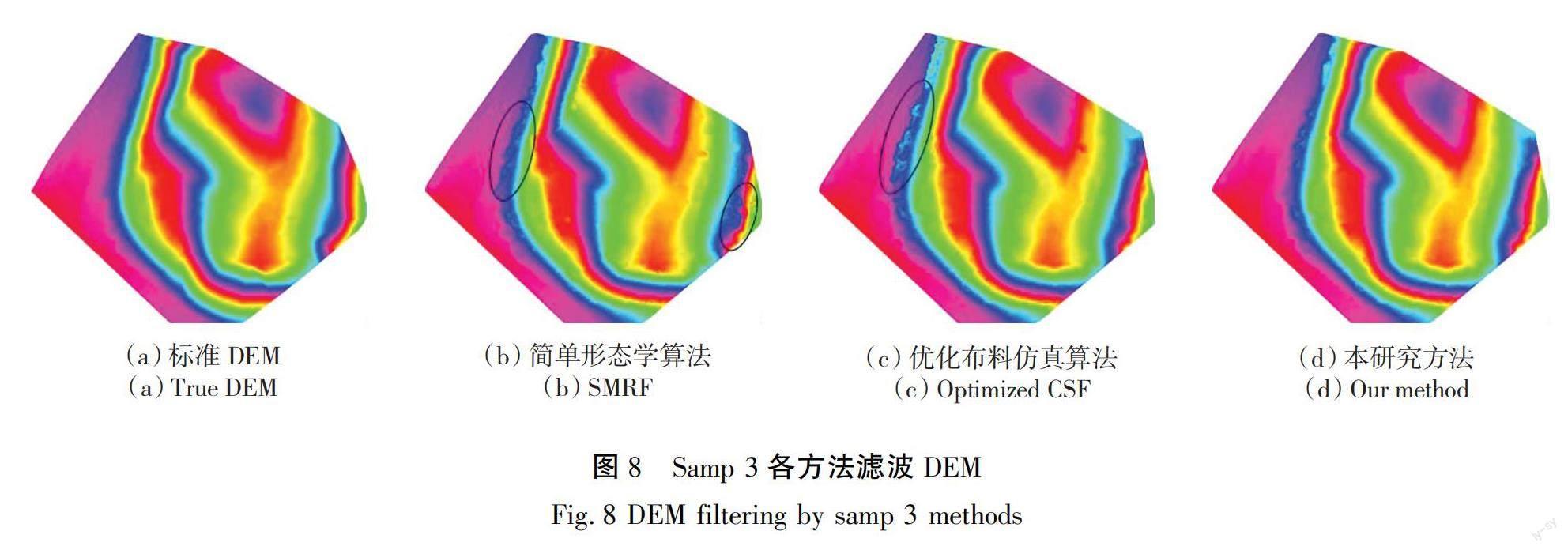
由图8可知,SMRF方法和优化CSF算法滤波生成的DEM在平地与陡坡衔接区域地形粗糙且凸起,是因为衔接处的植被无法较好滤去导致,本研究法滤波生成的DEM和标准DEM基本一致,但在衔接处仍存有少量凸起现象。
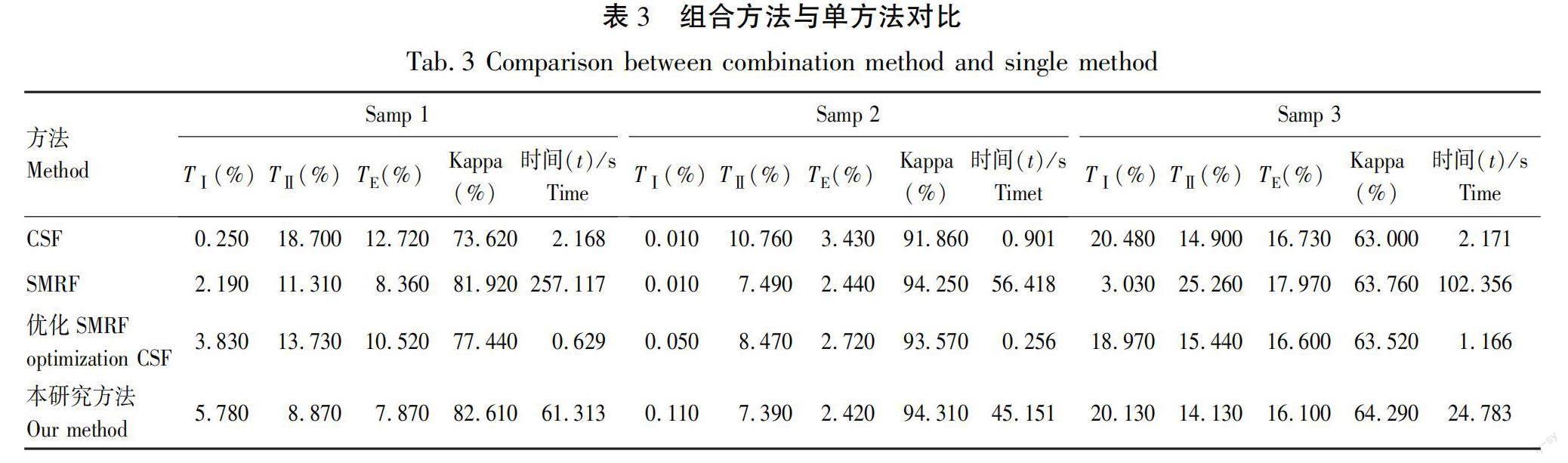
将本研究滤波后的结果分别和参数优化前的CSF方法,参数优化后的CSF方法及SMRF方法对3个样本通过误差评定进行精度评定,并给出了计算时间t,单位为s,见表3。
由表3可知,对CSF算法进行参数优化后,T和T都得到了降低,且Kappa系数增大,同时处理时间大大缩短,提高了数据分类的准确性及处理效率。对于地形复杂,植被较茂密的Samp 1林区地形,本研究方法相比于CSF和SMRF在Ⅱ类误差和总误差上平均降低5.71%和2.71%,Kappa系数提升4.95%;对于地势平坦,植被稀疏的Samp 2林区地形,本研究方法对于Ⅱ类误差,总误差和Kappa系数同样可以得到提升;对于地势陡峭,植被密集的Samp 3林区地形,SMRF方法滤波效果不如CSF方法,且本研究方法较另外2种方法,Ⅱ类误差及总误差呈现出下降的趋势,Kappa系数也有小幅上升。对于林区地形,SMRF算法总体上比CSF算法精度高,但处理时间慢,效率低,本研究方法可以有效综合2种算法性能,在保证一定效率的基础上提升滤波精度。
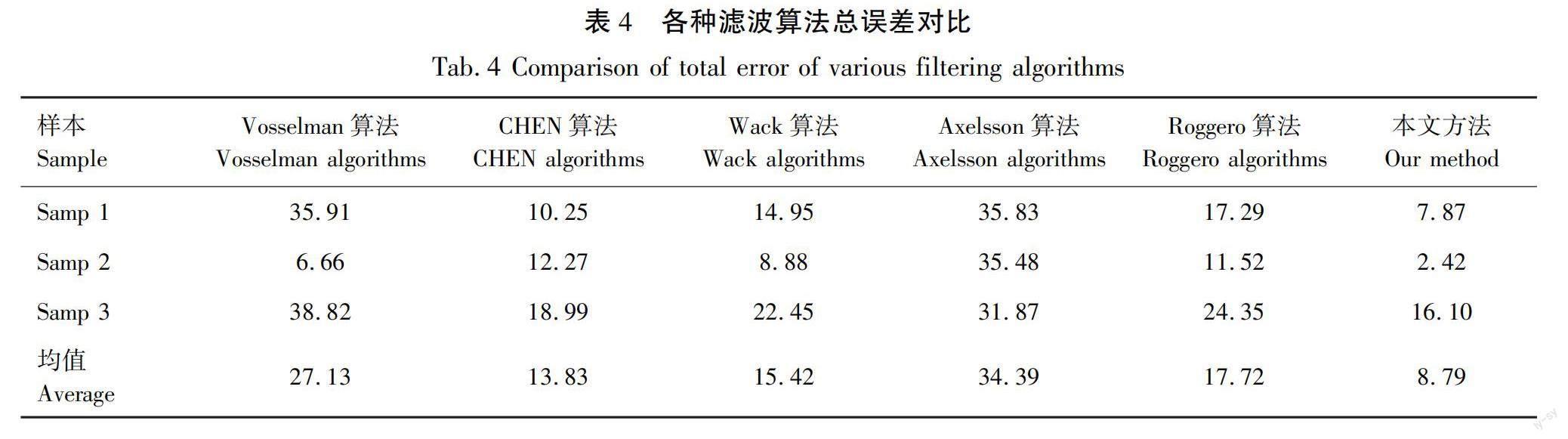
为进一步证明本研究方法的有效性,运用国际摄影测量与遥感协会(International Society for Photogrammetry and Remote Sensing,ISPRS)提供的5种常用经典算法对3个林区样本进行滤波处理,并与本研究方法滤波结果进行精度对比分析,见表4。
由表4可知,在3个样本中,本研究方法均优于ISPRS提供的5种经典算法,林区地面点点云数会因受植被覆盖度增大而减少,且林下地形复杂多变,本研究方法可以有效解决该问题,提高滤波精度,可适用于不同地形且植被覆盖度不同的林区区域。
3 结论
本研究采用CSF算法进行点云粗滤波,并结合SMRF算法中的迭代开运算方法进行精滤波处理,相比CSF和SMRF单方法滤波,Ⅱ类误差和总误差降低,可以在林区植被点与地点的分类处理中取得更好的滤波效果,增加Kappa系数,并优于ISPRS提供的5种经典算法滤波效果。通过对CSF方法的参数进行优化,可以进一步提升本研究方法的滤波精度,尤其是在地形复杂且植被茂密的林区,组合滤波算法的效果更有优势。
【参 考 文 献】
[1]赵利霞,王宏涛,郭增长,等.基于随机森林的倾斜影像匹配点云分类研究[J].测绘工程,2018,27(12):13-18.
ZHAO L X, WANG H T, GUO Z C, et al. A study of classification of point clouds generated by oblique imagery based on random forest[J]. Engineering of Surveying and Mapping, 2018, 27(12): 13-18.
[2]惠振阳,程朋根,官云兰,等.机载LiDAR点云滤波综述[J].激光与光电子学进展,2018,55(6):7-15.
HUI Z Y, CHENG P G, GUAN Y L, et al. Review on airborne LiDAR point cloud filtering[J]. Laser & Optoelectronics Progress, 2018, 55(6): 7-15.
[3]VOSSELMAN G. Slope based filtering of laser altimetry data[J]. International Archives of Photogrammetry and Remote Sensing, 2000(33):678-684.
[4]汪文琪,李宗春,付永健,等.一种多尺度自适应点云坡度滤波算法[J].武汉大学学报(信息科学版),2022,47(3):438-446.
WANG W Q, LI Z C, FU Y J, et al. A multi-scale adaptive slope filtering algorithm for point cloud[J]. Geomatics and Information Science of Wuhan University, 2022, 47(3): 438-446.
[5]何培培,万幼川,黄桂平,等.城区LiDAR点云自适应坡度的滤波算法[J].遥感信息,2017,32(5):62-68.
HE P P, WAN Y C, HUANG G P, et al. Adaptive slope filtering algorithm for LiDAR point clouds in urban areas[J]. Remote Sensing Information, 2017, 32(5): 62-68.
[6]王爱丽,张宇枭,吴海滨,等.基于集成卷积神经网络的LiDAR数据分类[J].哈尔滨理工大学学报,2021,26(4):138-145.
WANG A L, ZHANG Y X, WU H B, et al. LiDAR data classification based on ensembled convolutional neural networks[J]. Journal of Harbin University of Science and Technology, 2021, 26(4): 138-145.
[7]ZHANG K Q, CHEN S C, WHITMAN D, et al. A progressive morphological filter for removing nonground measurements from airborne LIDAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(4): 872-882.
[8]CHEN Q, GONG P, BALDOCCHI D, et al. Filtering airborne laser scanning data with morphological methods[J]. Photogrammetric Engineering & Remote Sensing, 2007, 73(2): 175-185.
[9]PINGEL T J, CLARKE K C, MCBRIDE W A. An improved simple morphological filter for the terrain classification of airborne LIDAR data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 77: 21-30.
[10]WACK R, WIMMER A. Digital terrain models from airborne laser scanner data - a grid based approach[J]. International Archives of Photogrammetry and Remote Sensing, 2002.
[11]朱磊,鄧兴升,邢承滨,等.基于多级种子点优化的移动曲面滤波算法[J].激光与光电子学进展,2020,57(17):274-281.
ZHU L, DENG X S, XING C B, et al. Moving surface filtering algorithm based on multilevel seed point optimization[J]. Laser & Optoelectronics Progress, 2020, 57(17): 274-281.
[12]朱笑笑,王成,习晓环,等.多级移动曲面拟合的自适应阈值点云滤波方法[J].测绘学报,2018,47(2):153-160.
ZHU X X, WANG C, XI X H, et al. Hierarchical threshold adaptive for point cloud filter algorithm of moving surface fitting[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 153-160.
[13]AXELSSON P. DEM generation from laser scanner data using adaptive TIN models[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 23(B4): 110-117.
[14]曾妮红,岳迎春,魏占營,等.车载LiDAR点云滤波的改进不规则三角网加密方法[J].测绘科学,2016,41(9):136-139,46.
ZENG N H, YUE Y C, WEI Z Y, et al. An improved irregular triangular network encryption method of vehicle-borne LiDAR point clouds[J]. Science of Surveying and Mapping, 2016, 41(9): 136-139, 46.
[15]朱磊,邓兴升,邢承滨.PTD滤波格网参数的等值线确定方法[J].应用激光,2020,40(2):336-341.
ZHU L, DENG X S, XING C B. Method for determining contour of PTD filter grid parameters[J]. Applied Laser, 2020, 40(2): 336-341.
[16]ZHANG W M, QI J B, WAN P, et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing, 2016, 8(6):501.
[17]石壮,杜全叶,王庆栋,等.虚拟格网分类支持下的密集匹配点云布料模拟滤波[J].测绘通报,2022(2):73-77.
SHI Z, DU Q Y, WANG Q D, et al. Cloth simulation filtering method of dense matching point cloud based on virtual grid classification[J]. Bulletin of Surveying and Mapping, 2022(2): 73-77.
[18]张昌赛,刘正军,杨树文,等.基于LiDAR数据的布料模拟滤波算法的适用性分析[J].激光技术,2018,42(3):410-416.
ZHANG C S, LIU Z J, YANG S W, et al. Applicability analysis of cloth simulation filtering algorithm based on LiDAR data[J]. Laser Technology, 2018, 42(3): 410-416.
[19]王明华,张小红,郭斐,等.陡坡林区的LIDAR点云滤波方法[J].测绘信息与工程,2008,33(6):1-3.
WANG M H, ZHANG X H, GUO F, et al. Filtering algorithm for lidar points cloud in forestry with steep slope[J]. Journal of Geomatics, 2008, 33(6): 1-3.
[20]彭丽.植被密集的陡坡区机载LiDAR数据滤波方法研究[D].重庆:重庆大学,2015.
PENG L. Research on airborne LiDAR data filtering for steep area with dense vegetation[D]. Chongqing: Chongqing University, 2015.
[21]陈传法,王梦樱,杨帅,等.适用于林区机载LiDAR点云的多分辨率层次插值滤波方法[J].山东科技大学学报(自然科学版),2021,40(2):12-20.
CHEN C F, WANG M Y, YANG S, et al. A multi-resolution hierarchical interpolation-based filtering method for airborne LiDAR point clouds in forest areas[J]. Journal of Shandong University of Science and Technology (Natural Science), 2021, 40(2): 12-20.
[22]SITHOLE G, VOSSELMAN G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2004, 59(1/2): 85-101.
[23]CONGALTON R G. A review of assessing the accuracy of classifications of remotely sensed data[J]. Remote Sensing of Environment, 1991, 37(1): 35-46.
[24]ROGGERO M. Airborne laser scanning: clustering in raw data[J]. International Archives of Photogrammetry and Remote Sensing, 2001, XXXIV(3/W4)227-232.